Лаг – навигационный прибор, предназначенный для определения скорости судна.
СодержаниеСвернуть
- Датчики скорости
- Электромагнитные датчики скорости
- Доплеровские датчики скорости
- Блок питания
- Электронная часть
- Факторы, влияющие на точность показаний
- Поиск неисправностей
По способу определения скорости лаги делятся на:
- Относительные – определяющие Маневрирование и управление судном в узкостяхскорость судна относительно воды;
- Абсолютные – определяющие скорость судна относительно грунта.
Независимо от принципа работы все лаги имеют следующие основные части:
- Датчик скорости. Вырабатывает сигнал о скорости судна;
- Блок питания. Вырабатывает напряжения, необходимые для работы лага;
- Электронная часть. Преобразует сигнал от датчика скорости;
- Индикатор. Служит для отображения информации о скорости в удобном для считывания виде.
Конструктивно все вышеперечисленные части могут быть выполнены как в отдельных блоках, так и объединены в многофункциональные блоки.

Лаги могут иметь устройства размножения информации (для подключения нескольких индикаторов), устройства сопряжения с другими навигационными приборами, вырабатывая один или несколько стандартных форматов сигнала (например, для ввода информации о скорости судна в радар, гирокомпас, автопрокладчик и т.д.).
Для удобства многие лаги имеют диалоговый режим работы, встроенные тесты, которые определяют работоспособности прибора в целом и упрощают поиск неисправности, и дополнительные функции, расширяющие функциональность прибора. Часть лагов имеют дополнительные регулировки, позволяющие скорректировать возникшую во время эксплуатации погрешность, а так же повысить Электронавигационные приборыточность показаний прибора.
Современные лаги достаточно надежны, и не требуют к себе много внимания. Однако, перед выходом в рейс желательно провести тестовую проверку прибора (если есть встроенный тест), проверить надежность крепления разъемов, наличие и надежность заземления блоков.
Большинство узлов современных лагов отремонтировать в судовых условиях невозможно. Задача судового специалиста сводится к поиску неисправного узла, блока, платы. В редких случаях замена вышедших из строя платы или узла лага выполняется судовыми специалистами. Обычно, ремонт выполняют сервисные специалисты.
В настоящее время существует большое количество моделей лагов, однако, в целом, подход к ним одинаковый. Основная цель данной главы – помочь понять общий принцип работы лагов, а так же дать ряд рекомендаций по некоторым моделям. Особенности конкретной модификации можно найти в Инструкции по эксплуатации и в Техническом описании.
Рекомендуемый набор измерительного оборудования следующий:
- Мегомметр 500-вольтовый (если не оговорен другой тип в Инструкции по эксплуатации);
- Мультиметр цифровой с пределом измерения 20 (30) вольт и 200 вольт постоянного тока; 2 (5) вольт, 200 вольт, 750 вольт переменного тока; омметр, с пределом измерения 100 Ом, 2 КОм;
- Осциллограф.
Датчики скорости
По принципу работы Элементы автоматических систем суднадатчики скорости делятся на два основных типа:
- Использующие закон электромагнитной индукции. Устанавливаются в относительных лагах. Такие лаги называют индукционные или электромагнитные;
- Использующие эффект Доплера. Устанавливаются в абсолютных лагах. Такие лаги называют доплеровскими.
Датчики скорости являются единым не разборным узлом. В случае выхода из строя – не подлежат ремонту, производится замена.
Обычно датчики имеют кабель (длина 10 -15 метров), который через соединительную коробку подключается к трассе. Соединительная коробка может иметь предварительный усилитель.
Электромагнитные датчики скорости
Обычно, электромагнитные датчики скорости устанавливаются в днище судна заподлицо или выступающими за днище. Иногда датчики опускаются в воду на специальных кронштейнах.
Независимо от фирмы – производителя, форм и размеров датчика принцип его работы состоит в следующем. На встроенную внутрь датчика катушку подают переменный сигнал. Вокруг катушки создается электромагнитное поле. При протекании морской воды (являющейся токопроводной) через это поле на сигнальных контактах наводится ЭДС, пропорциональная скорости протекания воды. Полученный сигнал усиливается, отфильтровываются помехи, сигнал преобразовывается в цифровую форму и выводится на репитер или (после дополнительной специальной обработки) в периферийные устройства. Сигнальные контакты представляют собой два металлических контакта, соприкасающиеся с водой, но изолированные от корпуса и между собой изоляционной проставкой.
Предлагается к прочтению: Радиолокационные станции и средства автоматической радиолокационной прокладки
Как видно из принципа работы, морские течения будут влиять на полученный сигнал. Поэтому лаги, использующие такие датчики, называют относительными (измеряющие скорость судна относительно воды). Это необходимо учитывать при эксплуатации и регулировках. Температура и соленость воды изменяет её токопроводность, что соответственно влияет на показания лага. В последних моделях лагов появилась возможность вводить поправку на соленость для повышения точности.
Проверка электромагнитных датчиков может проводиться как в опущенном в воду, так и в извлеченном из воды положениях. В обоих случаях при измерении тестером катушка возбуждения должна прозвониться и иметь сопротивление единицы или десятки Ом. Сопротивление изоляции, измеренное мегомметром, должно быть порядка сотни МОм. При опущенном в воду датчике, сопротивления, измеренные мегомметром между корпусом и сигнальными концами, должны составлять десятки КОм и должны быть равны между собой. Перед проведением измерений необходимо отключить от схемы кабель, идущий к датчику.
В случае неравенства сопротивлений между корпусом и сигнальными концами, а так же раз в три месяца (если судно стоит в теплых морях, то раз в месяц) необходимо извлечь датчик для визуального осмотра сигнальных контактов. Следует прозвонить тестером цепь от каждого контакта до соответствующего конца кабеля и в случае обрыва цепи заменить датчик. При необходимости зачистить контакты датчика стирательной резинкой (в случае сильного загрязнения – очень мелкой шкуркой) и вернуть датчик на место, соблюдая прежнюю ориентацию и глубину погружения.
При падении сопротивления изоляции необходимо проверить возможность отключения кабеля от датчика. Если такой возможности нет, заменяется датчик с кабелем. При возможности отключения, проверить сопротивление изоляции кабеля. Если сопротивление занижено, необходимо заменить кабель. Если сопротивление нормальное, необходимо заменить датчик.
Управление судном при плавании во льдахПри плавании судна во льдах, при постановке судна в док, в других случаях при вероятности повредить датчик желательно его извлечь. В доке необходимо проверить рабочее положение датчика, и в случае необходимости подкорректировать.
После замены неисправного датчика, а так же в процессе эксплуатации и после обслуживания может возникнуть необходимость подкорректировать работу лага. Причина – возможное изменение уровня сигнала, вырабатываемого датчиком.
Доплеровские датчики скорости
Доплеровский эффект, используемый в абсолютных лагах, заключается в изменении частоты отраженного сигнала, посылаемого с движущегося объекта.
При излучении сигнала с движущегося судна, после приема сигнала, отраженного от грунта или от пограничного слоя воды, сравнивают частоты. Изменение (сдвиг) принятой частоты прямо пропорционально скорости движения судна. Пограничный слой воды может образоваться из-за разности температур или солености на разных глубинах, или при наличии подводных течений.
Для получения однозначности измерения и повышения точности применяют двух и четырех лучевые излучатели (антенны) четко ориентированные к диаметральной плоскости судна и имеющие небольшой наклон в плоскости горизонта.
Стандартная рабочая частота излучения находится в пределах 1-5 МГц.
Проверка датчика заключается в контроле сопротивления изоляции. Величина сопротивления должна быть не менее 100 МОм.
Для профилактического обслуживания при доковании необходимо извлечь датчик из клинкета, осмотреть и очистить поверхность, находящуюся в контакте с водой, установить датчик на место, обязательно соблюдая ориентацию и глубину установки. В случае обрастания поверхности ракушечником или сильным загрязнением рабочей поверхности необходимо очистить ее, но, не повредив при этом поверхность датчика. Если датчик встроен в днище, то его профилактика проводится без извлечения.
Блок питания
Блок питания служит для преобразования судового напряжения в напряжения, необходимые для работы лага. Обычно используются стабилизированные напряжения 5, 12(15) вольт. Остальные напряжения выпрямленные, или переменные.
Читайте также: Современные транспортные суда различного назначения
Для проверки стабилизированных напряжений необходим осциллограф. Пульсация не должна превышать 10 % от номинала.
Для проверки выпрямленных напряжений необходим цифровой тестер. Уход значения от номинала не более 5 %.
Переменные напряжения измеряются цифровым тестером. Уход от номинала не более 5 %.
Блоки питания не нуждаются в обслуживании, и проверяются при возникновении проблем в работе лага.
Электронная часть
Электронная часть служит для преобразования сигнала, полученного от датчика скорости, координации работы всех частей лага, выработки сигналов для работы с периферийными устройствами, реализации дополнительных функций (тест, расчет расстояния и пр.). В судовых условиях электронная часть неремонтопригодна. Многие современные электронные лаги имеют возможность тестирования (в том числе и самотестирования при включении). С помощью теста иногда возможно конкретизировать неисправную плату.
Факторы, влияющие на точность показаний
- Правильность установки датчика (параллельность к диаметральной плоскости судна, установка в днище судна, контролируемая в доке);
- Правильность начальных установок:
- При отсутствии течения относительный лаг должен показывать +00.1 -+00.2 узла, абсолютный – 00.0 узлов;
- Коэффициент усиления (масштаб) подбирается на ходу.
- Оценка запаса глубины под килем (“UKC”)Глубина под килем. Относительный лаг начинает нормально работать при глубине, равной 5 – 8 осадкам судна. Параметры абсолютного лага следует посмотреть в документации;
- Наличие бульбы может вызывать сбои в работе относительного лага;
- Для абсолютного лага имеет значение поверхность дна. Например, при толстом слое ила отраженного сигнала практически не будет. Часть современных доплеровских лагов имеет возможность работы или от грунта или от пограничных слоев воды;
- Соленость воды. Относительный лаг не будет работать в пресной воде. Часть современных доплеровских лагов имеет корректировку на скорость распространения сигнала, в зависимости от солености воды;
- Относительный лаг учитывает наличие течений.
Поиск неисправностей
Рассмотрим основные неисправности, которые могут возникать при эксплуатации и основные шаги для их поиска.
- Лаг не включается. Проверить наличие напряжения на входе блока питания (возможно, он объединен с электронной частью), наличие рабочих напряжений (обычно имеются контрольные лампочки или гнезда для контроля напряжений), проверить целостность предохранителей.
- Лаг включается, но имеет большую погрешность или показания равны нулю. Проверить датчик (сопротивление изоляции, целостность кабеля, ориентацию и положение в клинкете). Проверить блок питания (наличие рабочих напряжений по контрольным лампам, при наличии контрольных гнезд обязательно проверить уход от номинала и пульсацию стабилизированных напряжений). При наличии встроенного теста, провести его.
- Лаг имеет погрешность в пределах 10-15 процентов. Провести регулировку лага согласно инструкции по эксплуатации. Если результат недостаточен, произвести обслуживание датчика и повторить регулировку.
- Лаг показывает нули на прямых ходах, но показывает скорость при движении судна задним ходом. Проверить ориентировку датчика скорости по направлению нос-корма. Датчик развернут на 180 градусов.
Сноски
1. Относительные лаги.
В
настоящее время на судах морского
транспортного флота применяются
индукционные, гидродинамические и
радиодоплеровские лаги, измеряющие
скорость относительно воды.
Индукционные
лаги.
Их действие основано на свойстве
электромагнитной индукции. Согласно
этому свойству при перемещении проводника
в магнитном поле в проводнике индуктируется
э. д. с., пропорциональная скорости его
перемещения.
С
помощью специального магнита под днищем
судна создается магнитное поле. Объем
воды под днищем, на который воздействует
магнитное поле лага, можно рассматривать
как множество элементарных проводников
электрического тока, в которых
индуктируется э. д. с.: значение такой
э. д. с. позволяет судить о скорости
перемещения судна.
Индукционный
лаг, независимо от конструктивного
решения его узлов, включает:
электромагнит,
токосъемные контакты (электроды) для
съема наведенного в воде сигнала;
измерительное устройство для измерения
сигнала на электродах и преобразования
его в скорость; корректирующее устройство,
исключающее методическую погрешность
измеряемой скорости; счетно-решающее
устройство для выработки пройденного
судном расстояния; трансляционное
устройство для передачи данных о скорости
и пройденном расстоянии на репитеры и
в судовую автоматику.
Эксплуатируемые
на судах морского флота индукционные
лаги ИЭЛ-2 и ИЭЛ-2М построены по одинаковой
схеме:
они
измеряют только продольную составляющую
относительной скорости; выступающих
за корпус судна частей нет. Вся
измерительная и счетно-решающая часть
лагов ИЭЛ-2 и ИЭЛ-2М выполнена на
полупроводниковых элементах с максимальным
использованием интегральных микросхем.
Блочно-функциональный принцип построения
обеспечивает быстрое отыскание
неисправностей и их устранение путем
замены отдельных узлов (плат) без
последующей регулировки лага. Лаг ИЭЛ-2М
является модернизацией лага ИЭЛ-2.
Серийно изготовляется в настоящее время
только лаг ИЭЛ-2М. Лаг ИЭЛ-2 снят с
производства в 1980 г. Лаг ИЭЛ-2М может
устанавливаться на всех морских судах,
включая ледоколы и суда на подводных
крыльях.
Рекомендации
по эксплуатации заключаются в следующем.
С обрастанием корпуса судна лаги ИЭЛ-2
и ИЭЛ-2М начинают давать заниженные
показания. При этом проверка «рабочего
нуля», нуля измерительной схемы и
масштаба никаких изменений не показывает.
Для исключения погрешности за счет
обрастания корпуса необходимо установить
новый масштаб. Значение нового масштаба:
![]() ,
,
где
М — первоначально установленный масштаб;
Vл
— наблюдаемая скорость по лагу;
Vи
— действительная скорость судна
относительно поды в момент наблюдения.
После
вычисления нового масштаба необходимо
перевести лаг в режим масштабирования
(переключатель рода работы в приборе 6
перевести в положение «Масштаб») и с
помощью потенциометров «Масштаб грубо»
и «Масштаб точно» установить новое
значение масштаба. После этого вернуть
лаг в рабочий режим. Новое значение
масштаба записать в формуляр лага и на
карту в приборе 6. Установку нового
масштаба можно производить как на ходу,
так и при стоянке судна у причала и на
якоре.
В
схемы лагов ИЭЛ-2 и ИЭЛ-2М включен фильтр,
осредняюший их показания. Поэтому при
изменении судном скорости лаг фиксирует
это изменение с некоторым запаздыванием.
Фильтры имеют две постоянные времени,
устанавливаемые по желанию судоводителя
специальным тумблером. Первой постоянной
рекомендуется пользоваться при плавании
вблизи берегов и спокойном состоянии
моря, второй постоянной — при плавании
в открытом море и на сильном волнении.
Гидродинамические
лаги.
Принцип действия основан на измерении
гидродинамического давления, создаваемого
скоростным напором набегающего потока
воды при движении судна.
Поправка
гидродинамического лага, как правило,
нестабильна. Основными причинами,
обусловливающими ее изменения во время
плавания, являются дрейф судна, дифферент,
обрастание корпуса, качка и изменение
плотности морской воды с изменением
района плавания.
Рассчитать
изменение поправки лага от влияния
первых трех причин не представляется
возможным.
Практика
показывает, что наибольшую погрешность
в измерении скорости вызывает дрейф
судна. При больших углах дрейфа погрешность
может достигать 3-4%. От изменения
дифферента и обрастания корпуса
погрешность не превышает 1-2%. При
использовании штевневого приёмного
устройства погрешность от обрастания
корпуса судна вообще не возникает.
Погрешности
от дрейфа, дифферента и обрастания
корпуса носят систематический характер.
Поэтому, будучи определены из наблюдений,
они могут учитываться в дальнейшем при
счислении.
Погрешность
лага за счет качки носит периодический
характер. При выработке пройденного
расстояния эта погрешность интегрируется
и в случае симметричной качки обращается
в ноль.
Погрешность
(в %) лага от изменения плотности морской
воды с изменением района плавания может
быть рассчитана по формуле
![]() ,
,
где
Δν
— изменение плотности морской воды;
ρ
— плотность воды в районе плавания.
Наибольшее значение, которого может
достигать
Δv
— 1,0—1,5%. При плавании в одном бассейне
(Балтийское, Черное, Каспийское моря)
эта погрешность не превышает 0,5%.
2.
Абсолютные лаги.
Под
абсолютными понимаются лаги, измеряющие
скорость судна относительно грунта.
Разработанные в настоящее время
абсолютные лаги являются гидроакустическими
и делятся на доплеровские и корреляционные.
Гидроакустические
доплеровские лаги (ГДЛ).
Принцип работы ГДЛ заключается в
измерении доплеровского сдвига частоты
высокочастотного гидроакустического
сигнала, посылаемого с судна и отраженного
от поверхности дна.
Р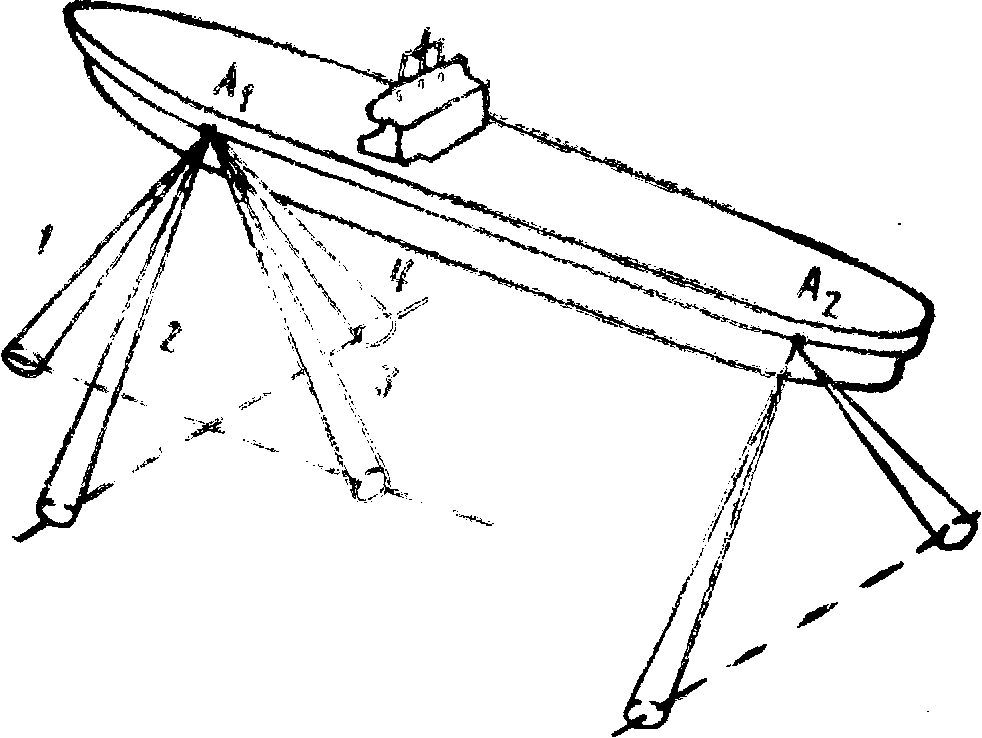 езультирующей
езультирующей
информацией являются продольная и
поперечная составляющие путевой
скорости. ГДЛ позволяет измерять их с
погрешностью до 0,1%, Разрешающая
способность высокоточных ГДЛ составляет
0,01— 0,02 уз.
Д
Рис
4.1. Схема расположения лучей
гидроакустического доплеровского лага
с двумя антеннами
Рис
4.1. Схема расположения лучей
гидроакустического доплеровского лага
с двумя антеннами
ля измерения только продольной
составляющей путевой скорости ГДЛ
должен иметь двухлучевую антенну А1
(на рис. 4.1 лучи 1 и 3). Для измерения
продольной и поперечной составляющих
антенна должна быть четырехлучевой,
Лучи 2 и 4 используются в этом случае для
измерения поперечной составляющей
путевой скорости. На основании измеряемых
продольной и поперечной составляющих
путевой скорости гидроакустический
доплеровский лаг позволяет определять
вектор путевой
скорости судна в каждый момент времени
и снос судна под влиянием ветра и течения.
При
установке дополнительной двухлучевой
антенны A2
(см. рис. 4.1) ГДЛ позволяет контролировать
перемещение относительно грунта носа
и кормы, что облегчает управление
крупнотоннажным судном при плавании
по каналам, в узкостях и при выполнении
швартовных операций.
Большинство
существующих ГДЛ обеспечивают измерение
абсолютной скорости при глубинах под
килём до 200-300 м. При больших глубинах
лаг перестаёт работать или переходит
в режим измерения относительной скорости,
т. е. начинает работать от некоторого
слоя воды как относительный лаг.
Антенны
ГДЛ не выступают за корпус судна. Для
обеспечения их замены
без
докования судна они устанавливаются в
клинкетах.
В
качестве электроакустических
преобразователей в антеннах доплеровских
лагов используются пьезокерамические
элементы.
Источниками
погрешности ГДЛ могут быть: погрешность
измерения доплеровской частоты; изменение
скорости звука в морской воде; изменение
углов наклона лучей антенны; наличие
вертикальной составляющей скорости
судна. Суммарная погрешность по этим
причинам у современных лагов не превышает
0,5%.
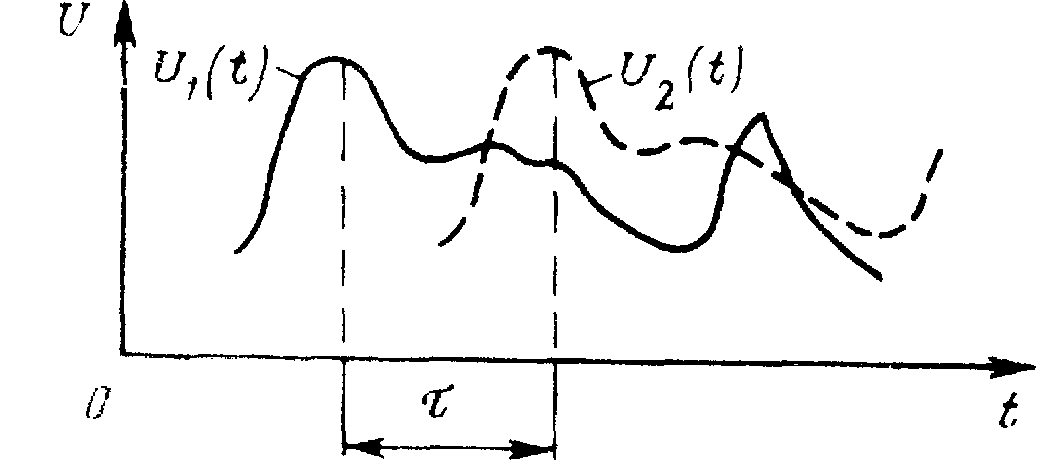
Корреляционные
лаги.
Принцип действия гидроакустического
корреляционного лага (ГКЛ) заключается
в измерении временного сдвига между
отраженным от грунта акустическим
сигналом, принятым на разнесенные по
корпусу судна антенны (рис. 4.2). Сигнал
U2(t),
принятый задней приемной антенной,
повторяет форму сигнала U1(t),
принятого передней антенной со сдвигом
по времени τ,
равным:
![]() ,
,
где
l — расстояние между антеннами;
V
— скорость судна.
О
Рис
4.2. Принцип действия корреляционного
лага
 пределение
пределение
временного сдвига производится путем
корреляционной обработки принятых
сигналов. Для этой цели в тракт сигнала
передней антенны вводится переменная
временная задержка, производится
вычисление взаимно-корреляционной
функции огибающих сигналов разнесенных
антенн и отслеживаются ее максимальные
значения.
На
глубинах до 200 м ГКЛ измеряет скорость
относительно грунта и одновременно
указывает глубину под килем. На больших
глубинах он автоматически переходит
на работу относительно воды.
Достоинствами
ГКЛ по отношению к ГДЛ являются
независимость показаний от скорости
распространения звука в воде и более
надежная работа на качке.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Суда занимают важнейшее место в жизни общества — они основная составляющая развития торговли.

Суда занимают важнейшее место в жизни общества — они основная составляющая развития торговли. Поэтому важнейшим развитием для человечества стало, развитие морского транспорта. Из-за отсутствия видимости берегов в море конструктора и изобретатели стремились создать устройство помогающее определять скорость движения судна по морской глади. Скорость необходима для расчётов местоположения.
Как определяли скорость
Солнце и звёзды дали возможность определения путёвого угла, часы отмеряют время, но как же определить скорость? Людям помогла смекалка, которая закрепила за морской скоростью такое понятие, как узел. Раньше моряки использовали доску, служащей плавучим якорем, к ней привязывался линь, на котором отмечались на равном расстоянии узелки. Принцип действия такого ручного лага сводился к следующему: доска сбрасывалась в воду, из-за противодействия воды она оставалась на месте, а судно в это время шло дальше, но разматывая верёвку с узелками вслед за остающейся доской. Тем самым за определённый период уходило определённое количество узелков в воду. Рассчитывая соотношение ушедших узелков и время получали скорость судна в узлах. Принято считать 1 узел равен 1 морской миле за 1 час преодоления судном. Так и появился относительный, ручной или секторный лаг, ставший прародителям целой плеяды сложнейших лагов.
Какие лаги бывают
Они классифицируются на относительные и абсолютные, те в свою очередь на индукционные и гидродинамические лаги, а также на гидроакустические доплеровские лаги, спутниковый лаг и корреляционные соответственно.
Относительные лаги
Он обеспечивает измерение пройденного расстояния и скорости относительно воды. Тем самым скрывая в себе первоначально ошибку в измерениях скорости, ведь вода накладывает ошибку на измерения, добавляя составляющие своего вектора движения. Таким образом, относительные лаги являются менее точными для судовождения.
Индукционный лаг
Имеют в основе, скрытое в классификации электромагнитное явление под названием индукция. Оно формируется на базе перемещения проводящего элемента внутри электромагнитного поля, тем самым возникает электродвижущая сила внутри проводника. Его вектор замеряется, и путём исчислений получается вектор движения судна. Электромагнитное поле возникает в воде под действием датчика, имеющего в своём составе магнит, и вода, являясь проводником, начинает создавать внутри себя электродвижущую силу, параметры которой и снимаются датчиком. Большой недостаток такого лага — нарастающие на дно биоорганизмы. Они сильно уменьшают создание магнитного поля и чувствительность приёмника. Ярким представителем таких типов лагов является ЛЭМ2-1М, производства «Электроприбор» в Санкт-Петербурге. Он имеет три различные версии в зависимости от установки приёмного устройства ЛЭМ2-1МН, ЛЭМ2-1МВ и ЛЭМ2-1МК.
Гидродинамический лаг
Вторым по популярности относительный лаг. Он основан на измерении давлении воды на датчик либо катушку. Давление создаётся благодаря гидродинамическим показателям набегающей воды. К данному вектору присоединяется масса ошибок, таких как качка, снос, дифферент и обрастание. Поэтому такие лаги чаще всего показывают ошибочные данные, но при этом довольно просты в изготовлении. Так что являются самыми бюджетными и часто используемыми на судах не поднадзорных сертификационным обществам. Популярными в данном виде является линейка лагов от производителя морской навионики Raymarina T111, T121 и Т915. Маломерные суда также используют гидродинамические лаги Lowrance, Furuno и Simrad.
Абсолютные лаги
Это следующий вид классификации морских лагов. Под термином абсолютный лаг понимают лаги, которые измеряют скорость судна относительно грунта.
Гидроакустический доплеровский лаг
Его работа основана на эффекте Доплера — при одинаковом излучении волн, объект, движущийся на источник излучения будет принимать волны быстрее, относительно своей скорости. Судно излучая прямо по курсу волны, посредством гидроакустического излучателя, принимает их отражёнными. Частота приёма увеличивается пропорционально скорости движения судна. Проведя подсчёт, получается расчётная скорость как по направлению движения судна, так и его смещение по оси У. Погрешность измерений в данном случае довольно мала, до 0,1%. Так достигается точность порядка 0,015 узла, что является довольно хорошим показателем в современных условиях, и развития морской электротехники.
Если доплеровские лаги доработать несколькими антеннами, возможно получить скорость смещения более точно по осям Х и У. Для крупнотоннажных судов это помогает контролировать движение. Данная функция также вносит облегчение швартовки. Но работает такой лаг при небольших глубинах, максимум 350 метров, что для глубоководных переходов является критичным. При увеличении глубины гидроакустическая волна начинает отражаться от более плотных слоёв воды на глубине порядка 320 метров, и принимается как абсолютная, но по факту являющаяся относительной.
Датчики доплеровских лагов являются критичными элементами системы, и поэтому убираются в клинкеты и танки, для защиты их ото льда, топляка и иных опасных предметов. Так как механическое повреждение антенны приведёт за собой дорогостоящие работы по его восстановлению. Увеличить ошибку замеров могут погрешность измерений частоты, появление вертикальной составляющей и наклон датчиков. Совместно это может увеличивать ошибку с 0,1 до 0,5 процента. Доплеровских лаги производят компании JRC модели JLN-550, JLN-652, JLN-205, JLN-740 и Furuno модели DS-80, DS-60 и DS-85.
Спутниковый лаг
Следующим абсолютным лагом является спутниковый тип лагов. Он работает так же, как и обыкновенные приёмники сигналов ГНСС. Рассчитывает своё местоположение благодаря альманаху спутников. Для этого достаточно трёх спутников. Определяя своё местоположение, лаг считает скорость относительно спутников, но так как они дают местоположение относительно земли, то и скорость рассчитывается относительно Земли. Поэтому лаги классифицируются как абсолютные. В зависимости от спутниковой системы используются ГЛОНАСС лаги, GPS лаги и другие. Ошибкой расчётов может стать только погрешности часов, находящихся в приёмниках лага, и время расчёта сигнала. Поэтому точность достигает порой до 0,01%, что является одним из лучших в классе. Непогода, сильное волнение, туман и прочие метеоусловия могут значительно отклонить точность показаний. Спутниковые лаги представлены японскими моделями JRC JLN-720 и Furuno GS-100.
Гидроакустические корреляционный лаг
Третий тип абсолютных лагов. Их принцип действия основан на временном прохождении одинаковыми акустическими сигналами, направленными в сторону дна от двух антенн, находящихся на разных расстояниях относительно центра корабля. То есть сигнал, отражённый от одной и той же точки в разное время, придёт в различные интервалы до первого и второго приёмника, тем самым возможно будет высчитать скорость относительно двух сигналов. Такой принцип действия зарекомендовал себя лучше, чем доплеровский принцип. Потому что у него отсутствует погрешность от скорости распространения звука в воде и компенсации качки. Но как и доплеровский лаг на больших глубинах, а в данном случае это более 200 метров, он становится относительным — сигнал отражается от воды в более плотных слоях. Яркими представителями данных лагов являются производитель Consillium и его станции SAL t2 и SAL R1a.