Сборка основы для рамы
Для увеличения прочности рамы вы можете распечатать на 3D принтере или нарезать на лазерном резаке рем-накладки.
-
В случае наличия, закрепите рем-накладки на пластинах жесткости, иначе продолжайте без них.

-
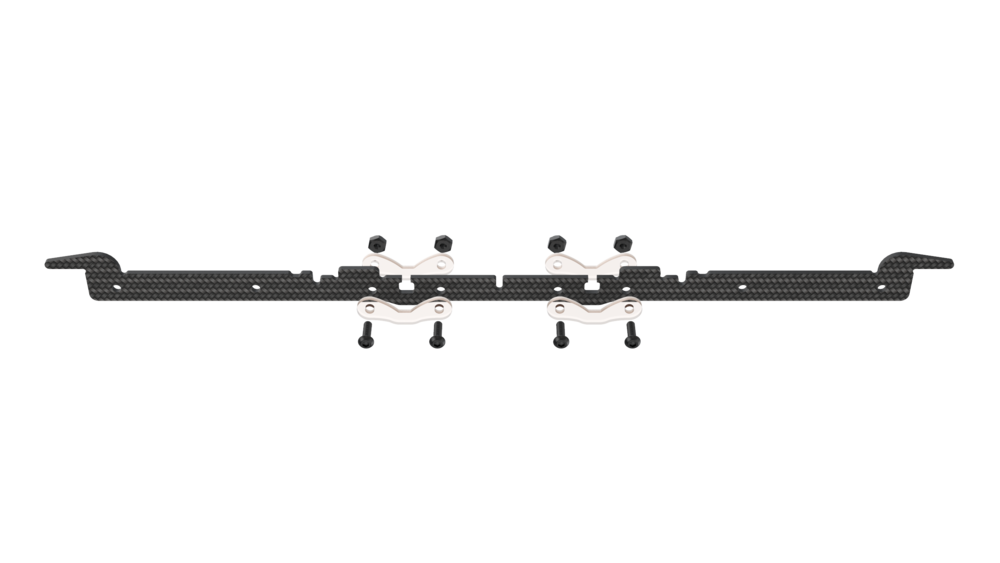
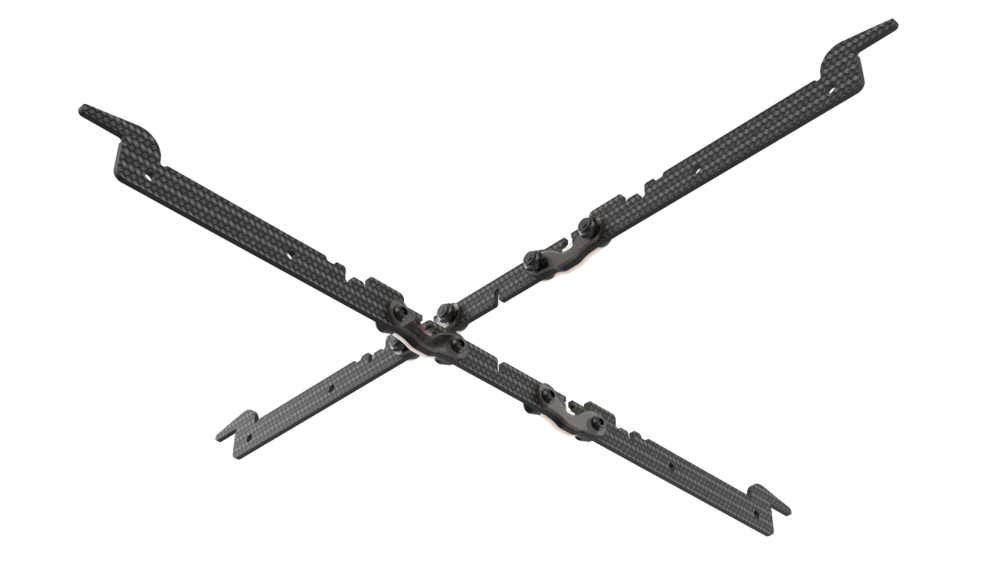
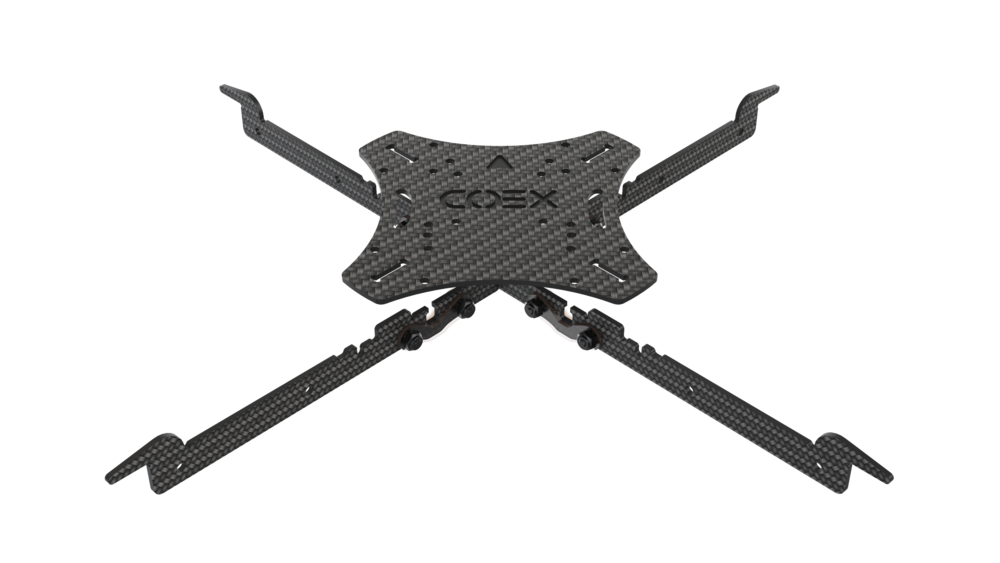
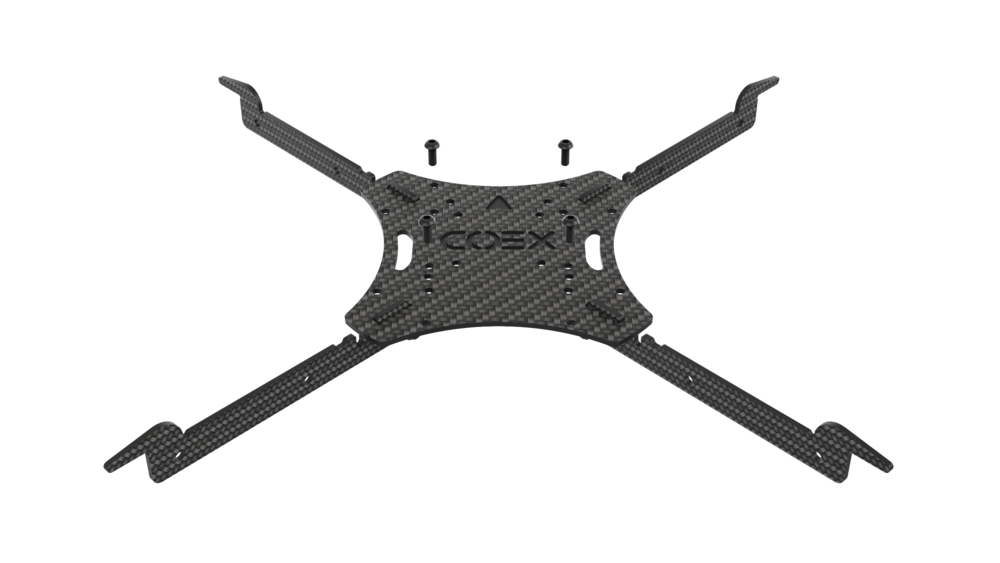
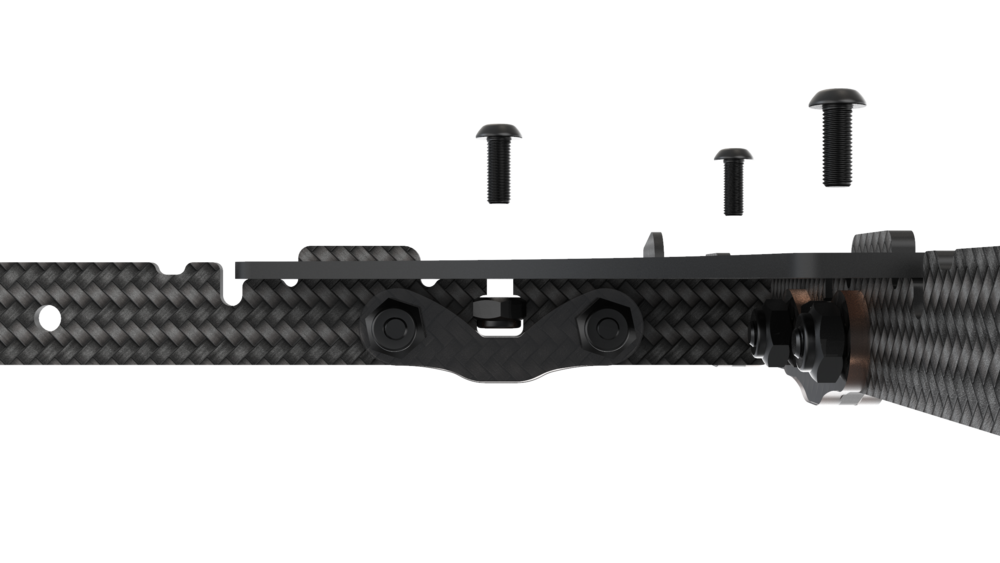
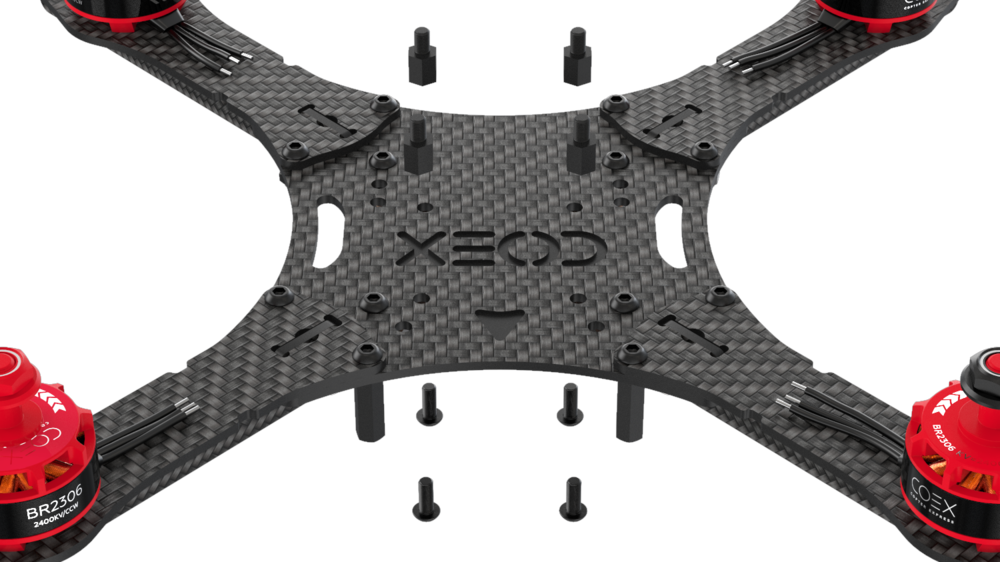
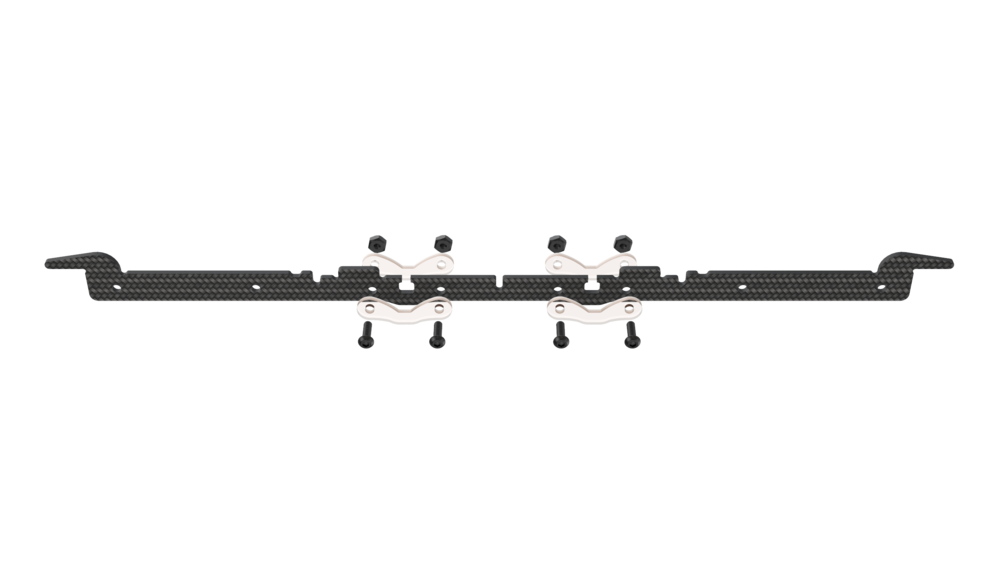
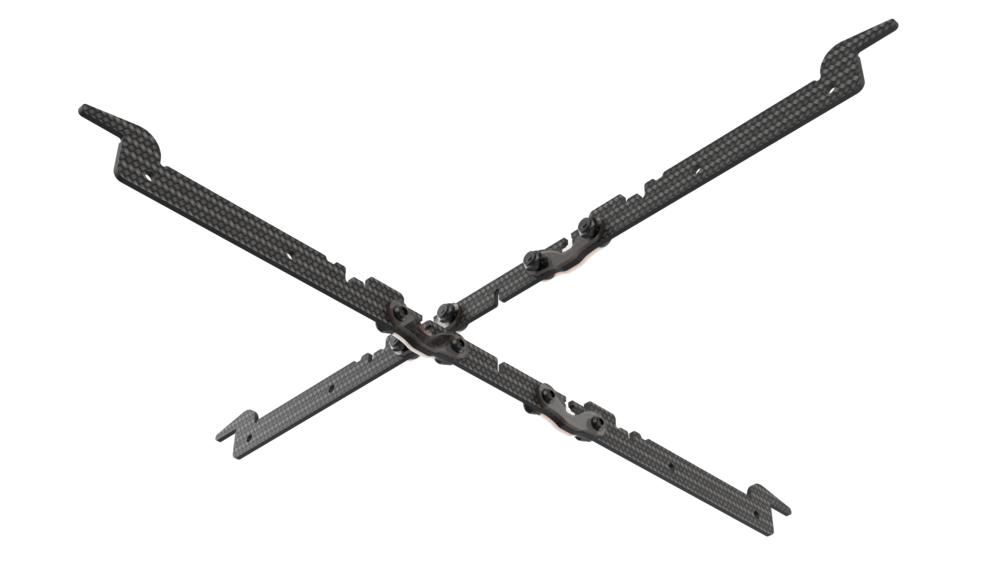
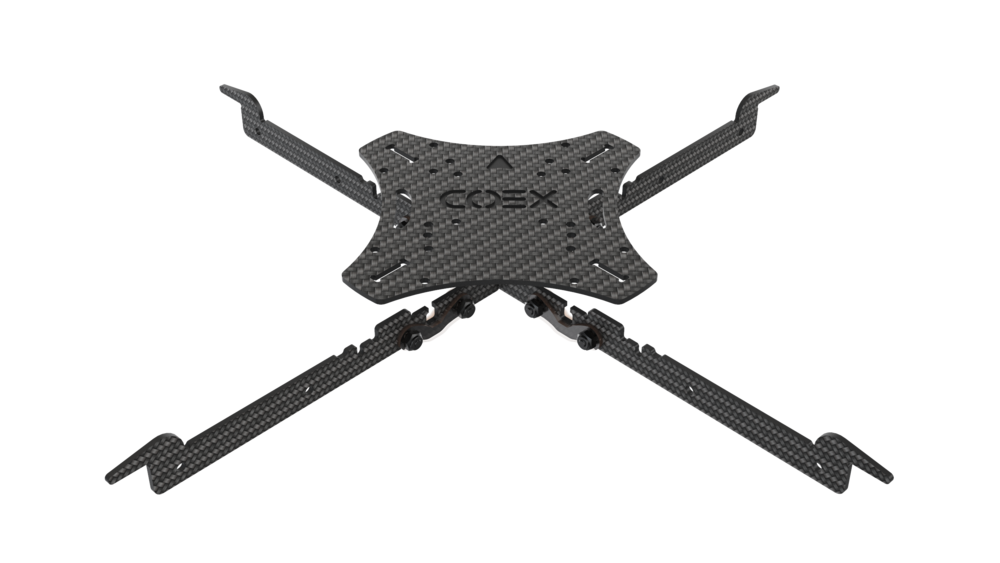
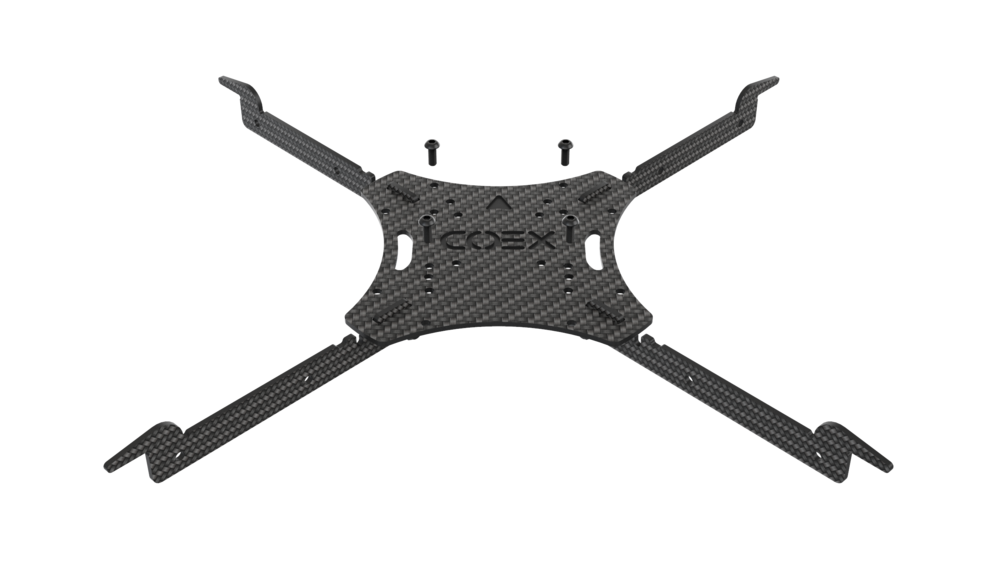
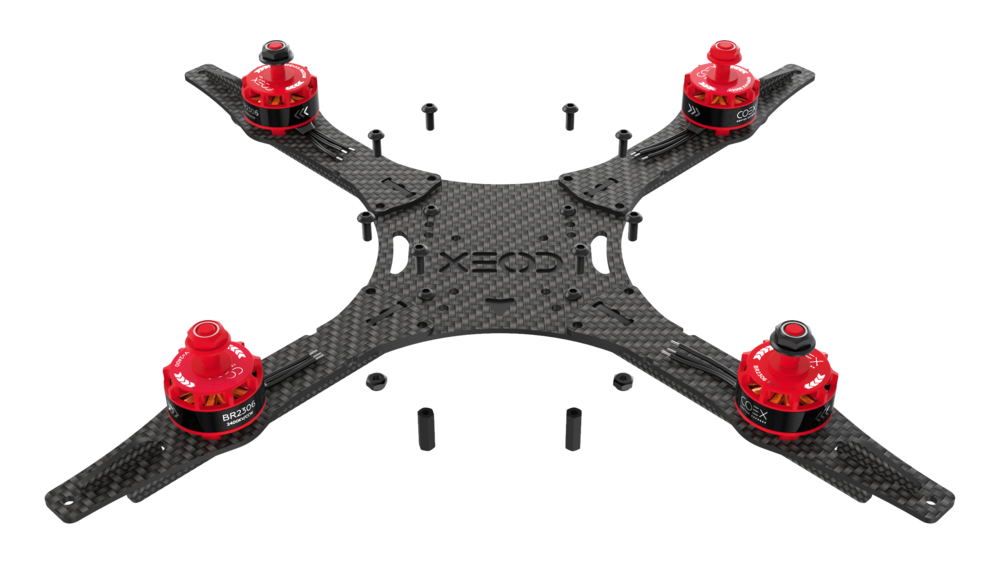
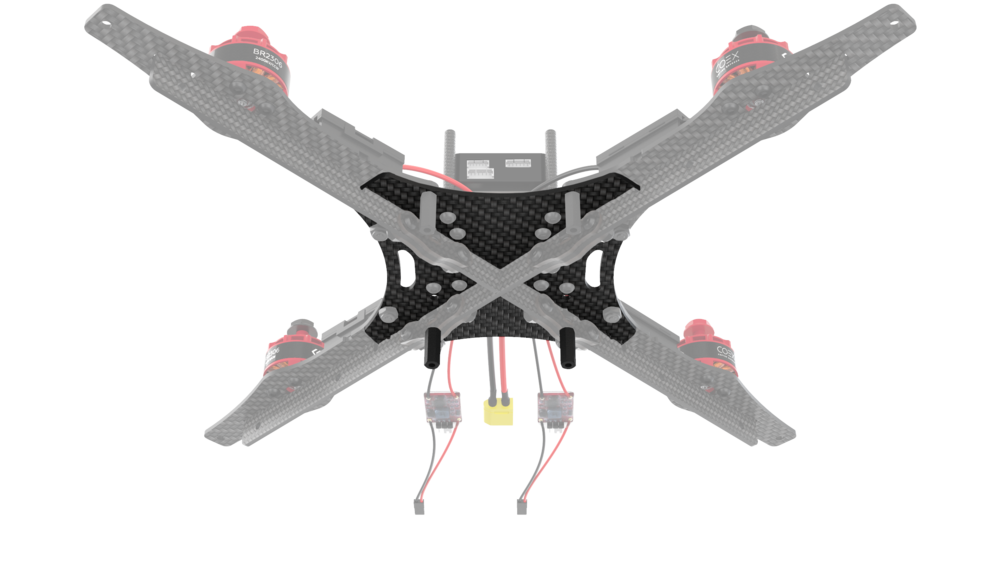
Совместите 2 карбоновые пластины жесткости, используя центральные пазы.
-
Используя пазы, установите сверху карбоновую центральную деку.
-
Стяните конструкцию с помощью винтов М3х8 и стальных гаек с нейлоновой вставкой, установленных в пазах пластин.
Установка моторов
- Распакуйте моторы.
-
Используя бокорезы, укоротите провода на моторах:
- Обрежьте половину длины (оставив 30 мм).
-
Зачистите (снимите 5 мм изоляции с конца провода, не повредив медные жилы).
-
Скрутите медные жилы.
- Залудите провода, используя пинцет.
-
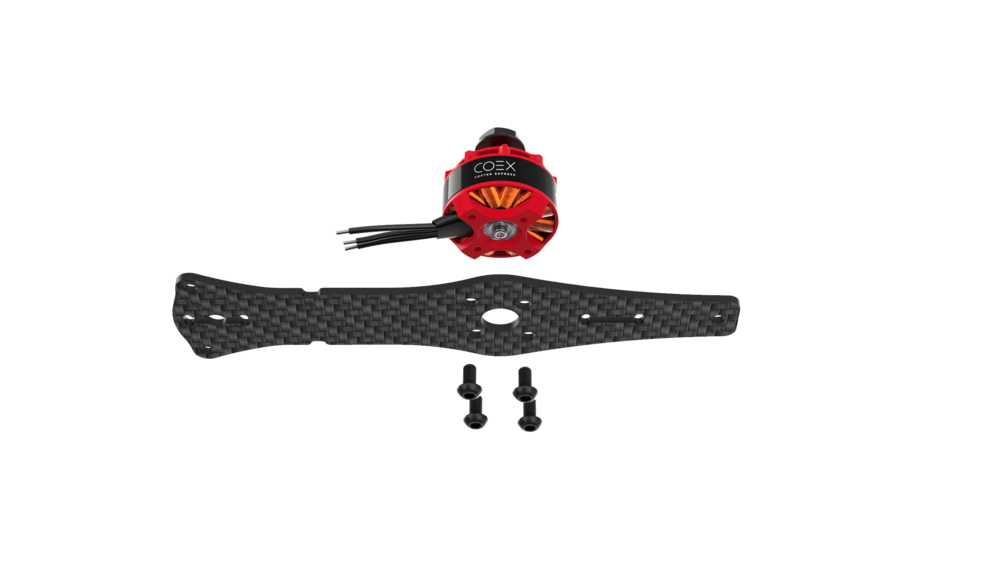
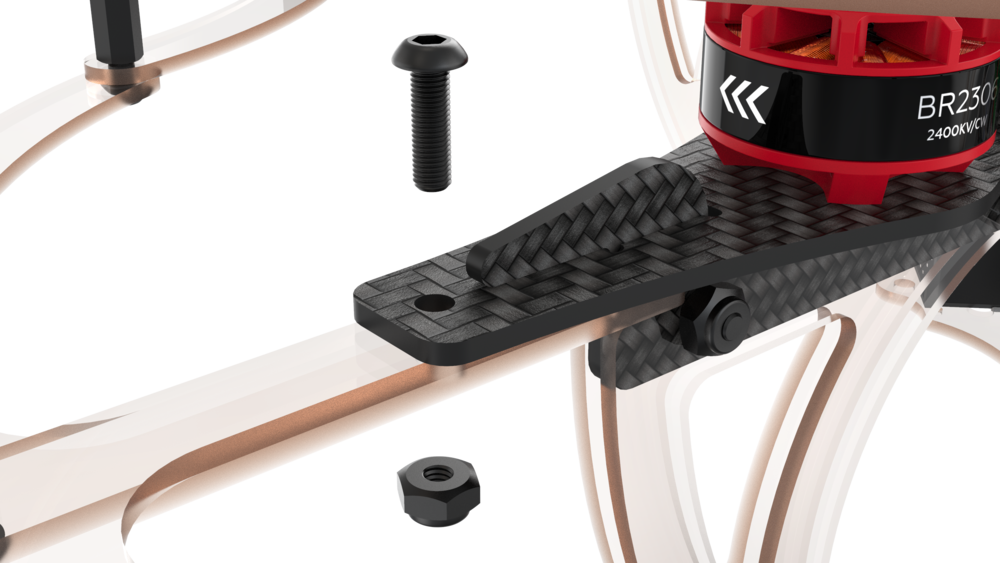
Установите мотор на луч.
-
Прикрепите мотор к лучу винтами М3х5, используя шестигранный ключ или отвёртку.

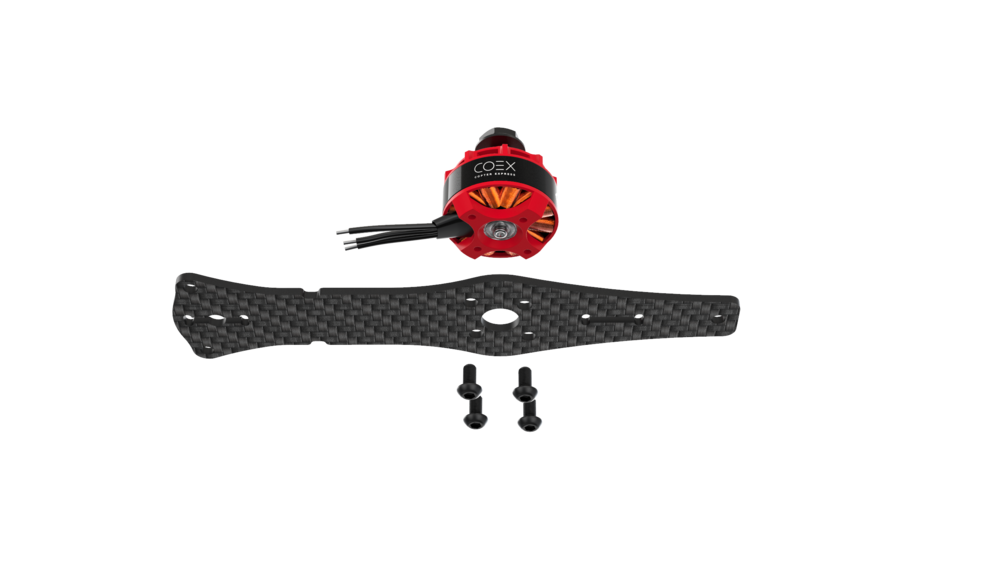
Повторите эти действия для остальных моторов.
Сборка рамы
-
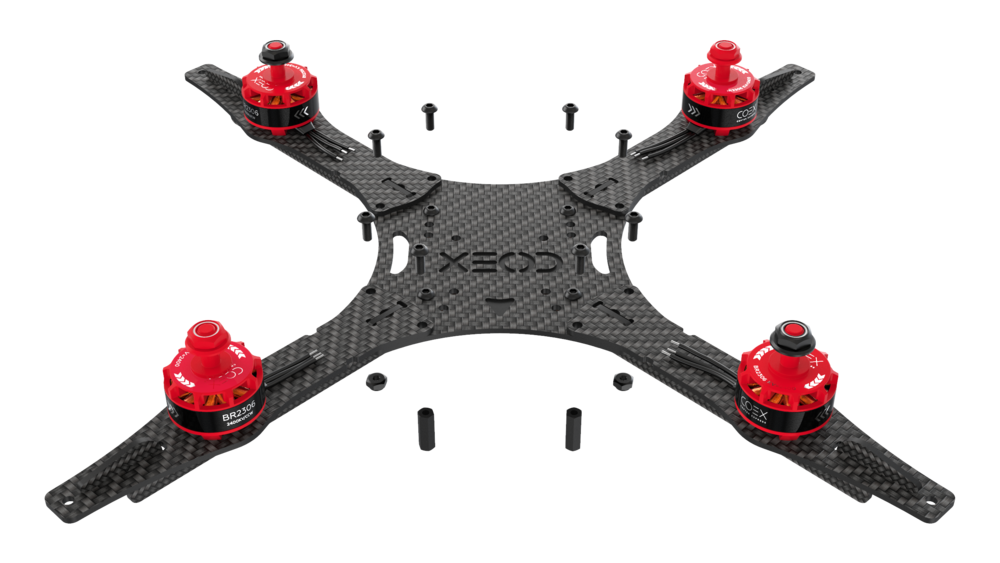
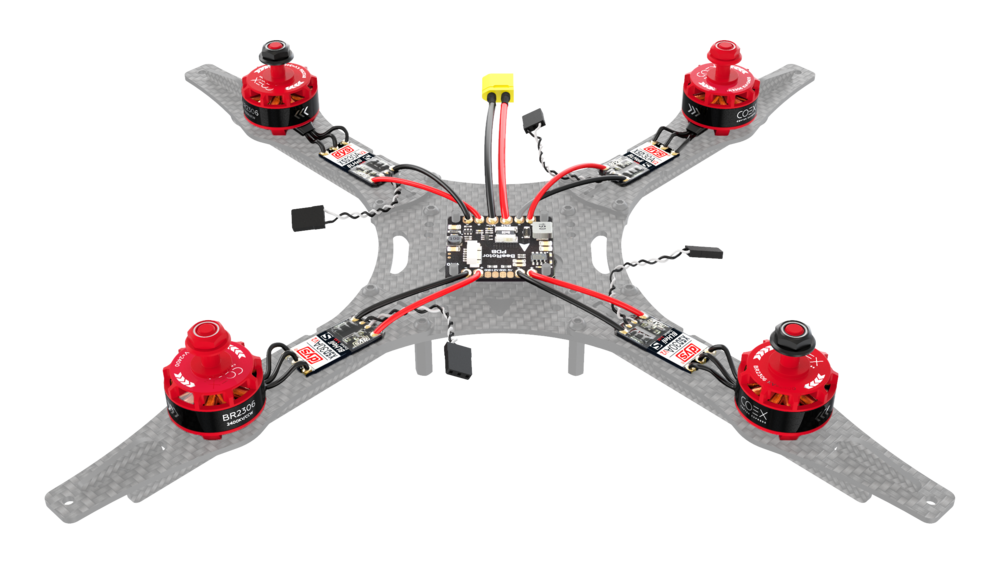
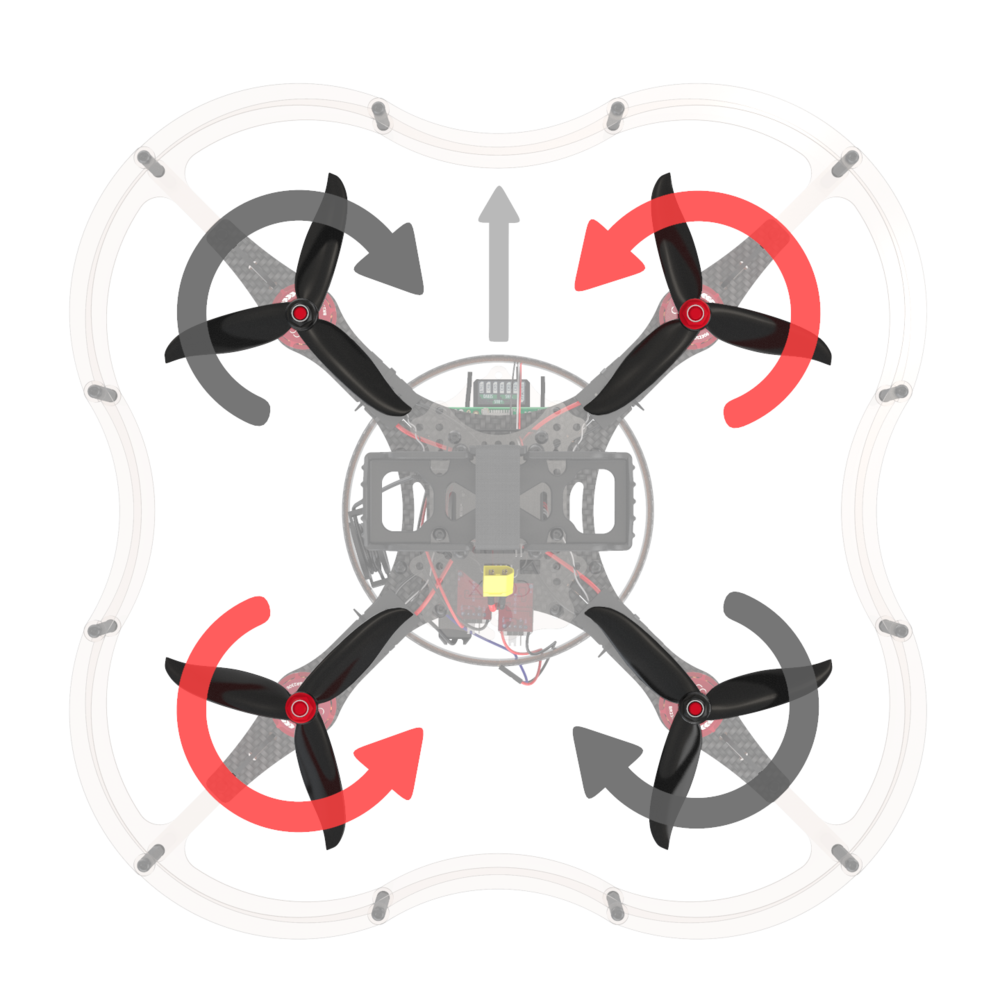
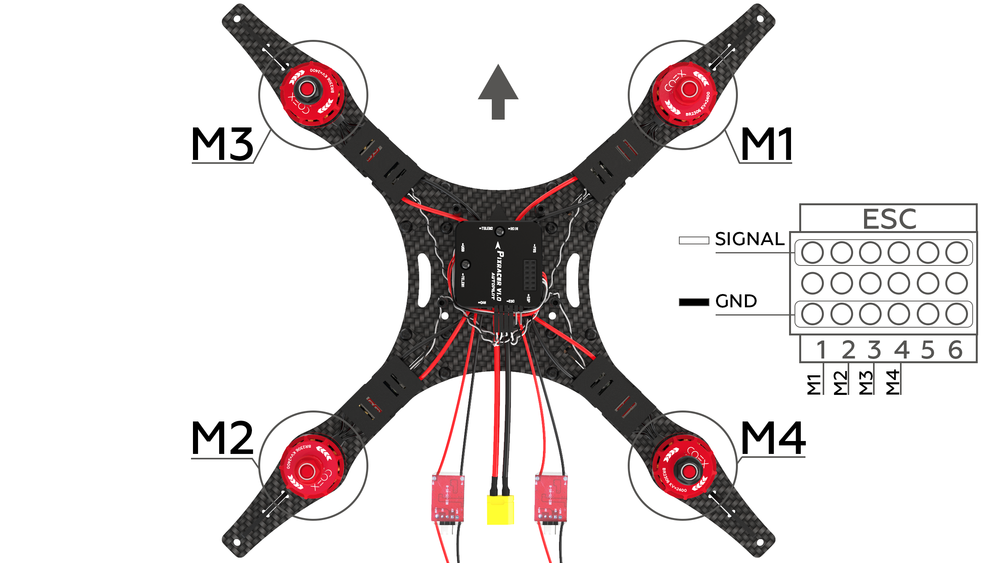
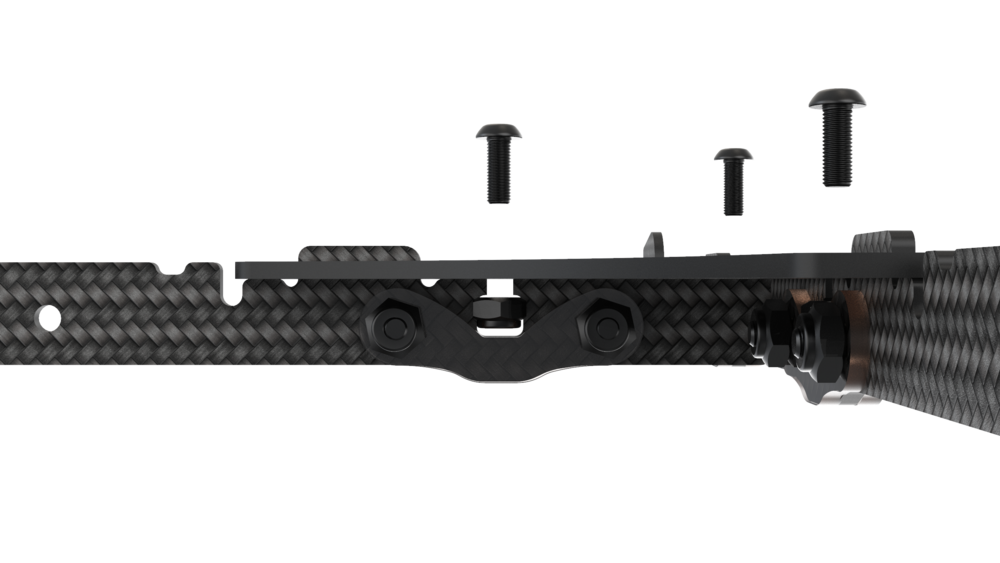
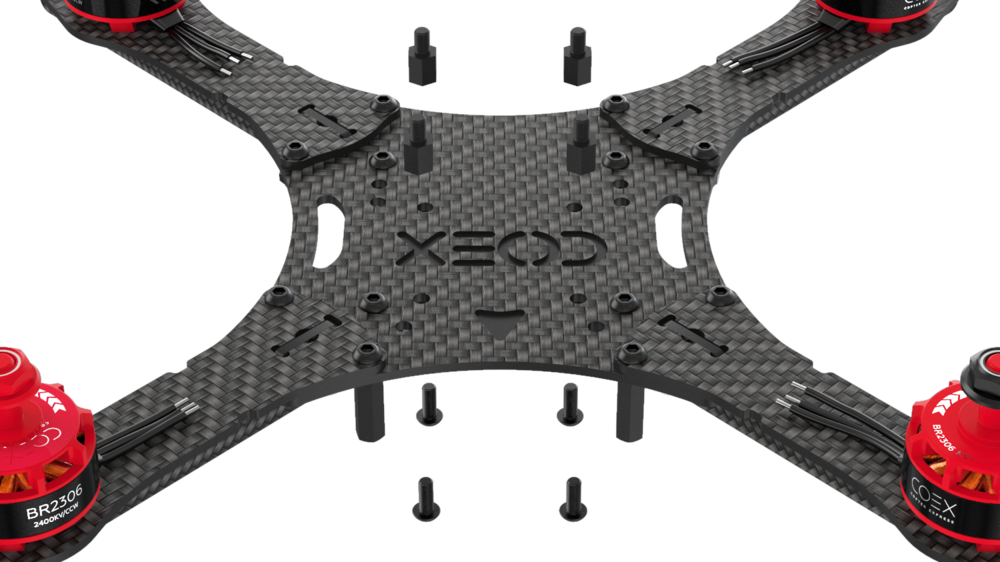
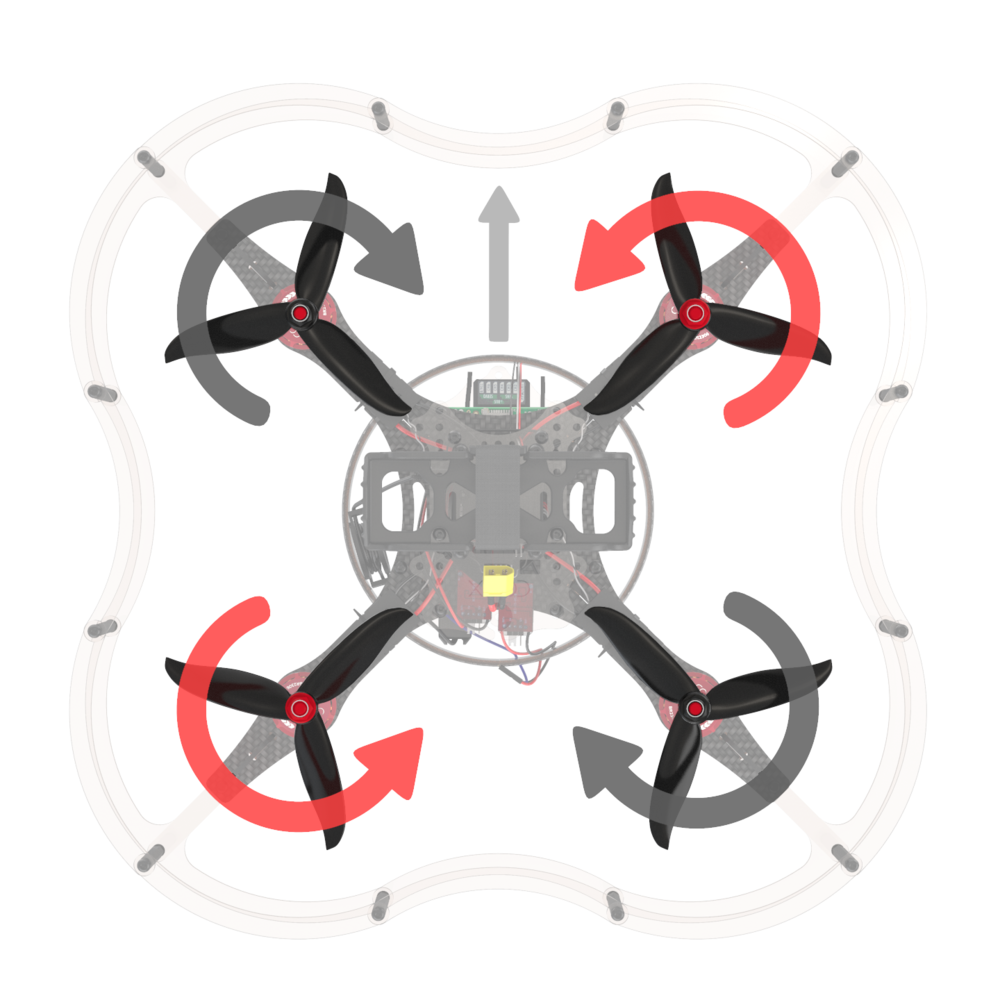
Установите 4 луча с моторами на базу рамы, используя пазы, согласно схеме вращения моторов.
Для правильной установки моторов обратите внимание на цвета гаек. Моторы с красными гайками следует установить на передний правый и задний левый лучи, с чёрными — на передний левый и задний правый.
-
Зафиксируйте лучи на раме, используя 8 винтов М3х8 и 6 стальных гаек, а также 2 стойки «мама-мама» 15 мм.


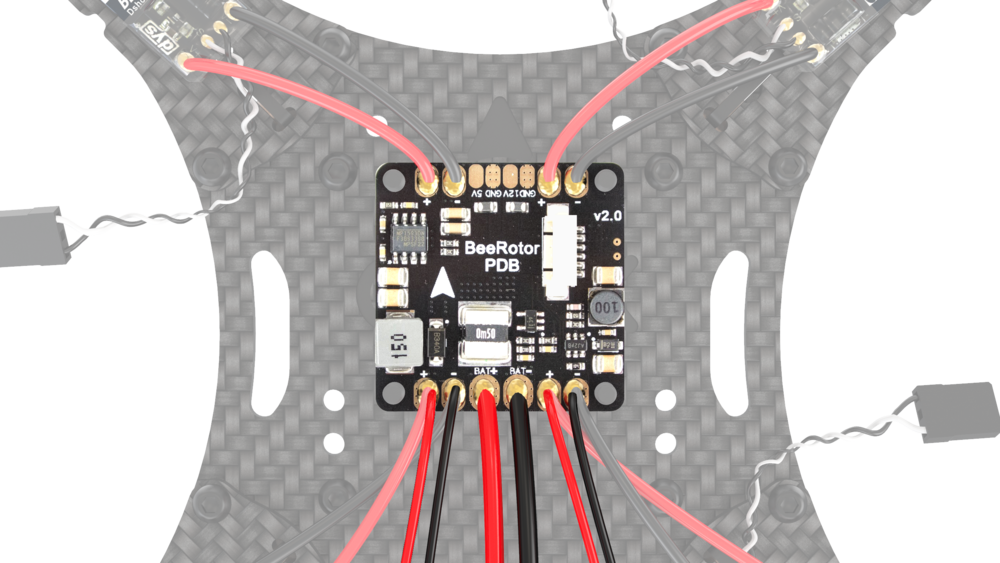
Подготовка платы распределения питания
- Залудите контактные площадки платы питания.
- С помощью мультиметра проверьте отсутствие короткого замыкания (прозвонить):
- Установите мультиметр в режим прозвонки.
- Проверьте работу мультиметра путем замыкания щупов между собой. При корректной работе прибор издаст характерный звук.
- Попарно один щуп прикладывается к контакту «+», а второй к «-»/GND. Если в цепи есть короткое замыкание, издается звук.
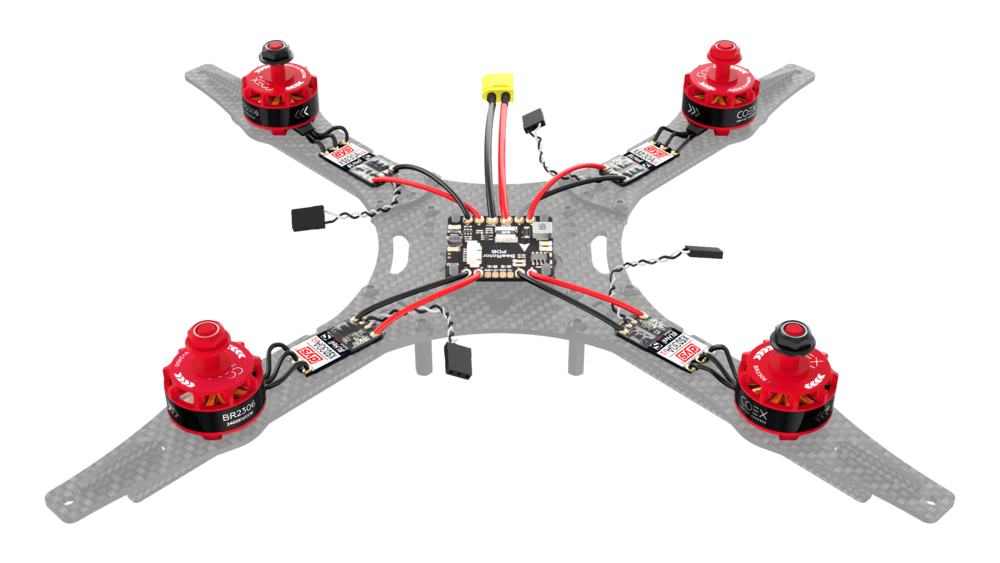
Монтаж PDB
-
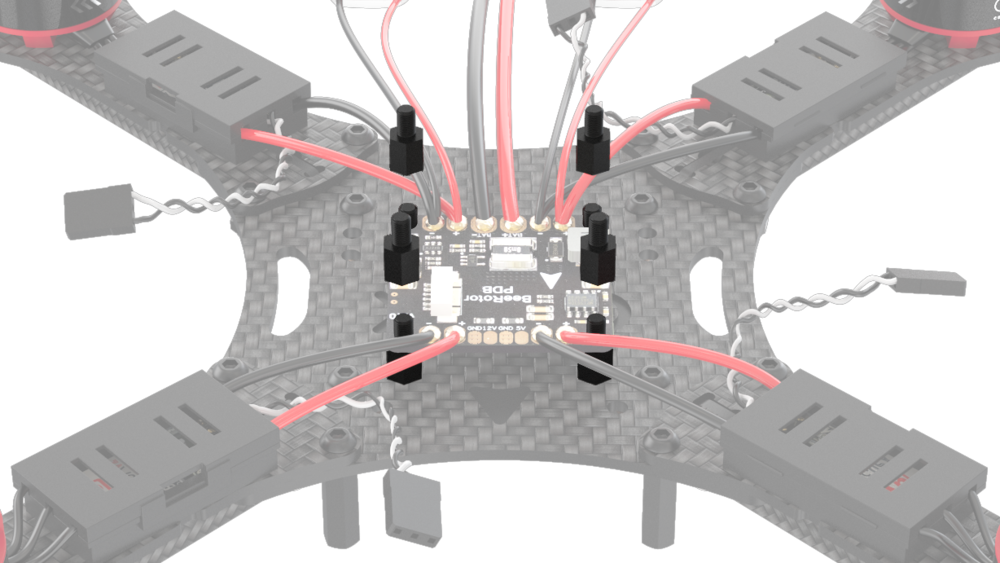
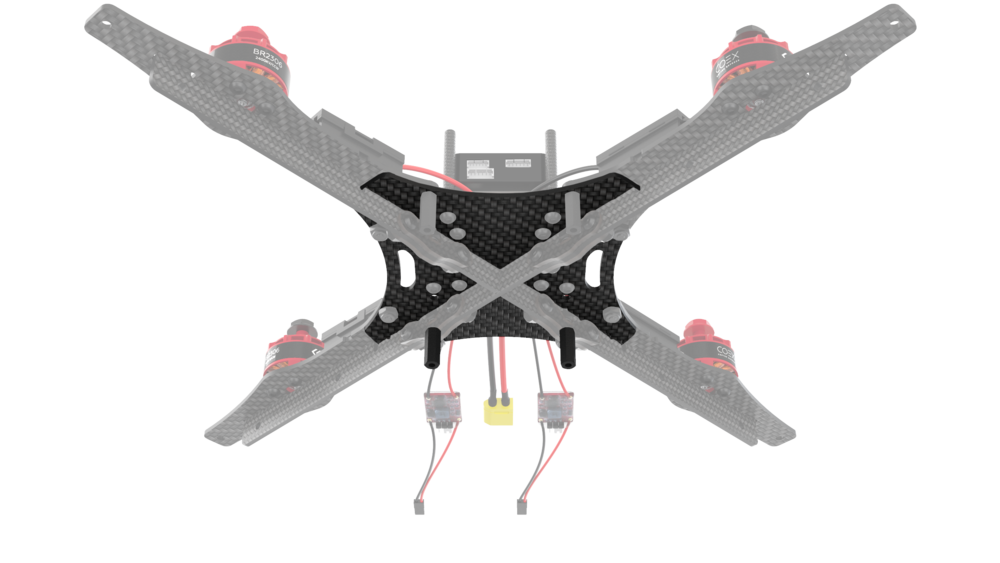
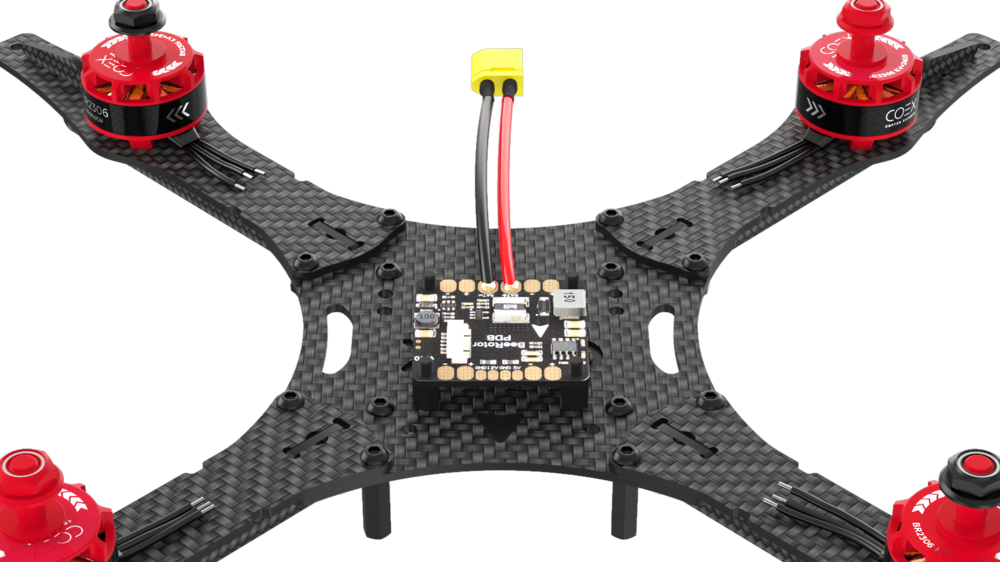
Установите 4 стойки «папа-мама» 6 мм на центральную деку винтами М3х6.
-
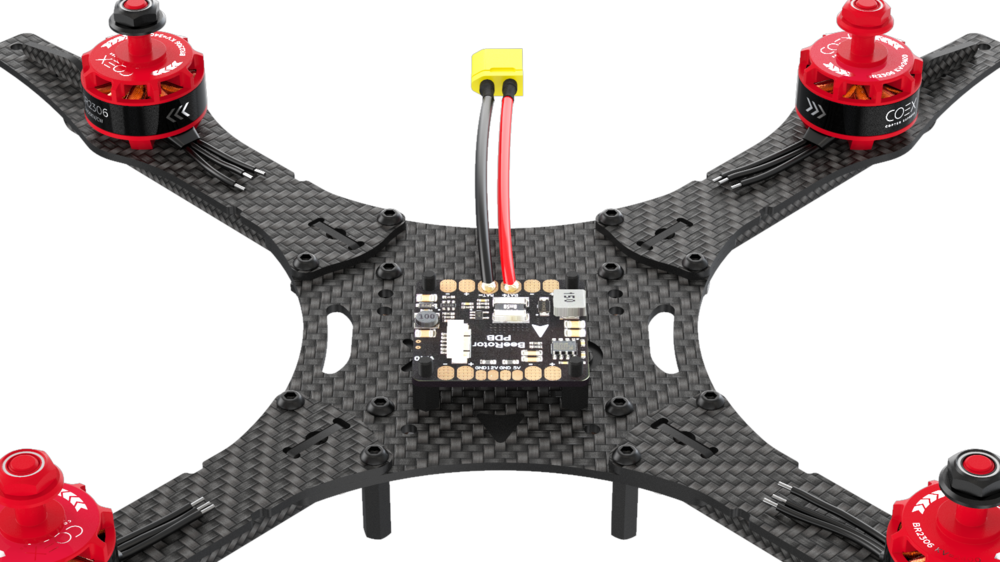
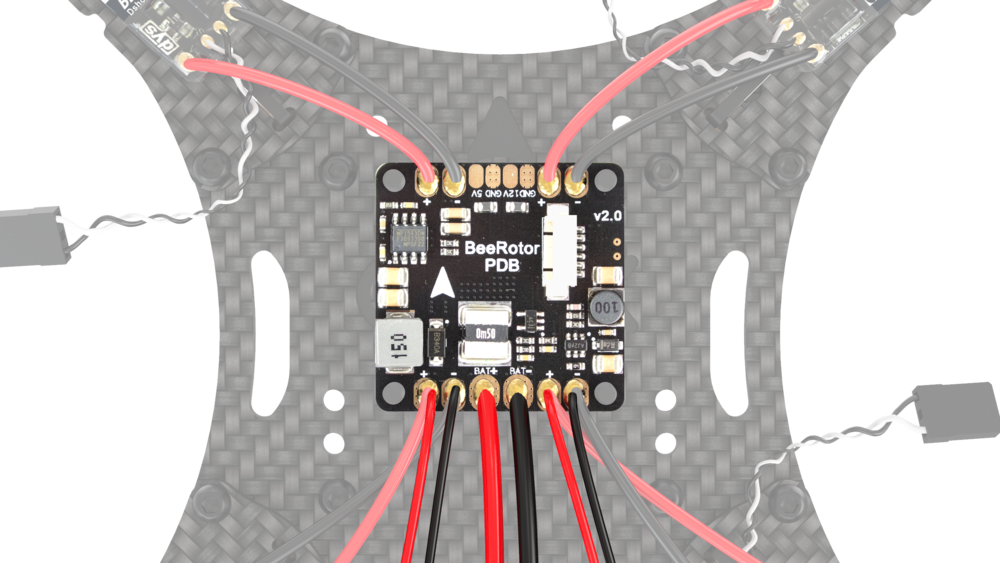
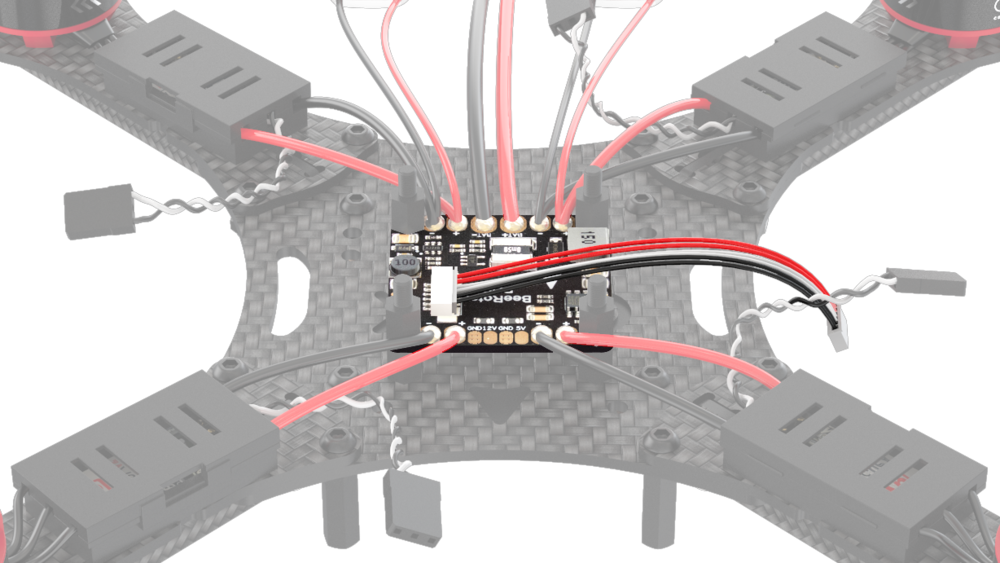
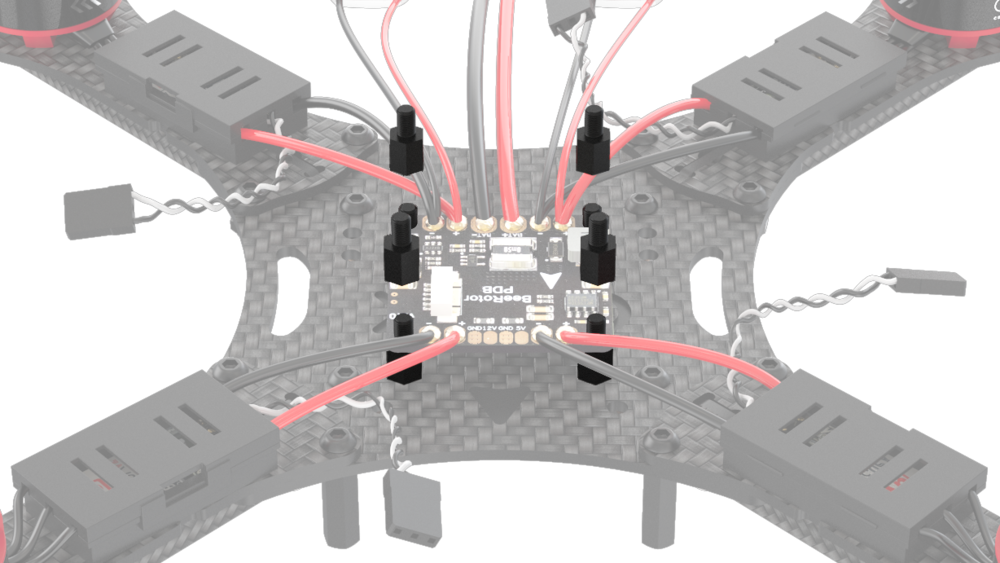
Установите PDB на стойки.
-
Стрелки на PDB и центральной деке должны быть направлены в одну сторону.

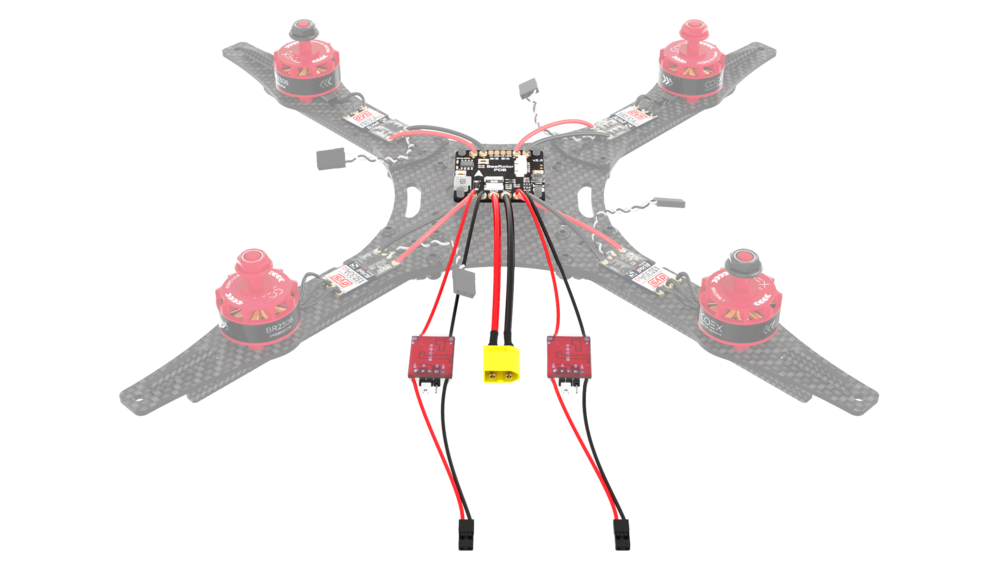
Пайка регуляторов и ВЕС
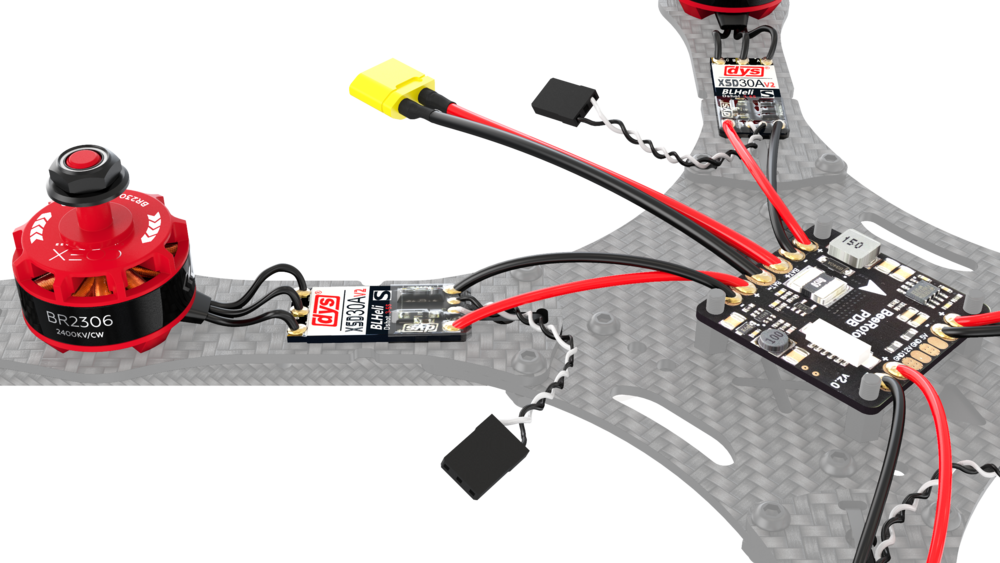
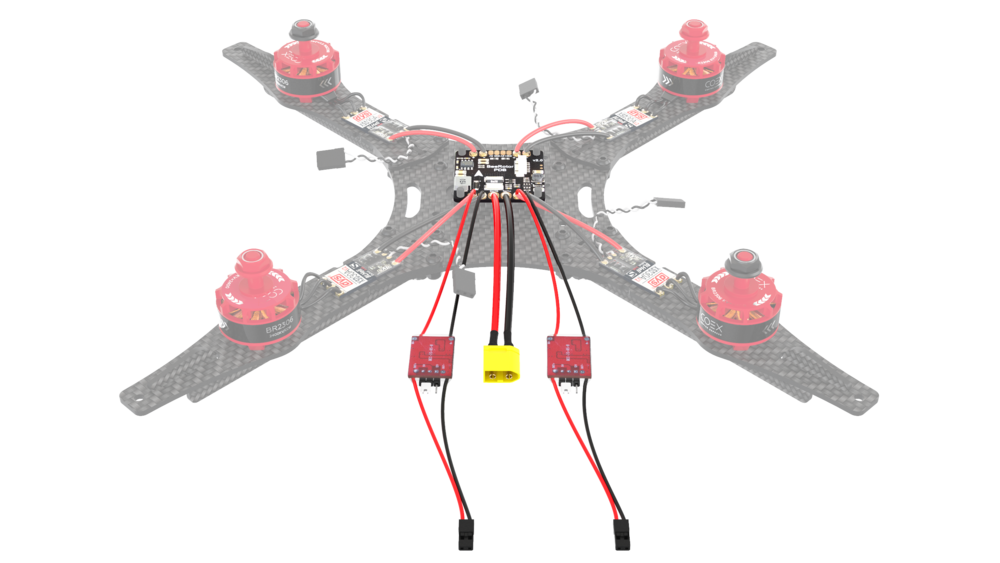
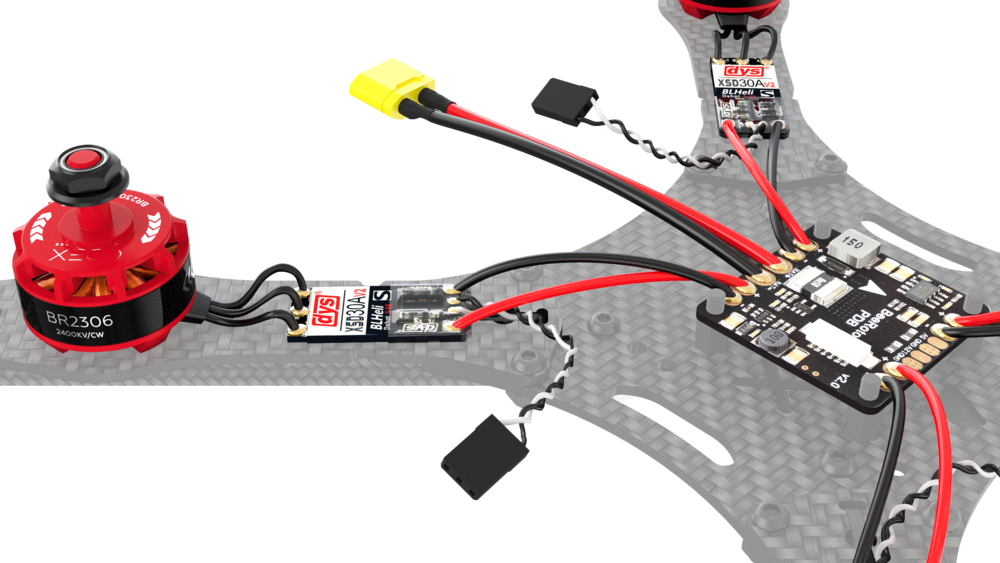
- Припаяйте фазные провода моторов к регуляторам.
-
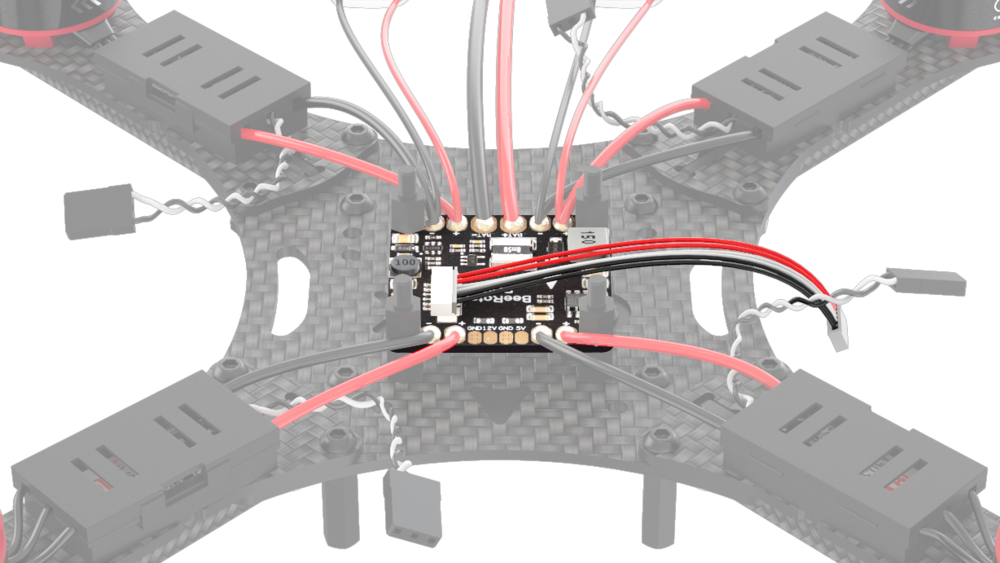
Припаяйте силовые провода регуляторов к контактным площадкам платы (красный к «+», черный к «-»).
-
Припаяйте силовые провода каждого BEC к контактным площадкам одного из регуляторов (красный к «+», черный к «-»).
-
С помощью мультиметра проверьте, что в цепи нет короткого замыкания.
Перевод пульта в режим PWM
Включите пульт с помощью слайдера POWER. Если пульт заблокирован, необходимо перевести все стики в начальное положение:
- Левый стик в центральной нижней позиции.
- Правый стик в центре.
-
Переключатели A, B, C, D в положение «от себя».


Убедитесь, что PPM в меню RX Setup отключен:
- Убедитесь, что питание дрона выключено.
- Для входа в меню удерживайте нажатой кнопку «ОК».
- Кнопками Up/Down выбираем меню «System setup», кнопкой «ОК» подтвердите выбор.
- Выберите «RX Setup».
- Выберите «Output mode».
- Убедитесь, что в открывшемся меню выбран пункт «PWM».
- Чтобы сохранить настройки, удерживайте нажатой кнопку «Cancel».
Сопряжение приёмника и пульта
- Выключите пульт с помощью слайдера POWER.
- Подключите радиоприемник к разъему BEC 5В. Чёрный провод подключите к одному из нижних пинов, красный — к одному из центральных.
- Установите джампер на вход (B/VCC).
- Подключите АКБ.
-
Светодиод на радиоприемнике должен мигать.
-
Зажмите кнопку BIND KEY на пульте.
-
Включите пульт (перещелкните POWER, не отпуская BIND KEY).
-
Ждите синхронизации.
- Отсоедините джампер.
- Светодиод на приемнике должен гореть непрерывно.



Проверка направления вращения моторов
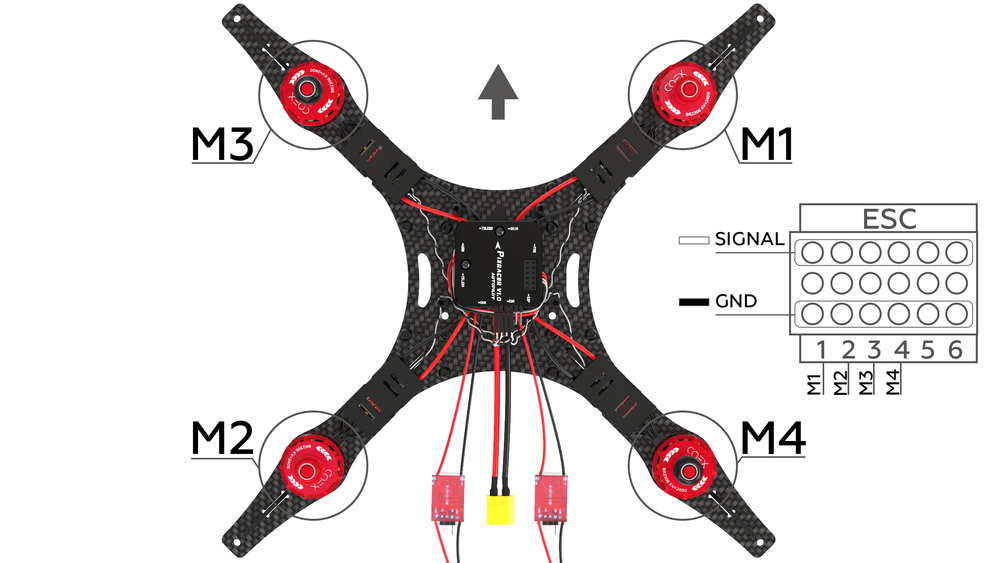
Моторы с красными гайками должны вращаться против часовой стрелки, с чёрными — по часовой стрелке. Правильные направления вращения также указаны на самих моторах. Для проверки направления вращения можно использовать сервотестер или радиоприёмник с пультом.
- Отключите АКБ и пульт.
- Подключите сигнальный провод от ESC к выходу CH3 на приёмнике. Белый провод должен подходить к верхнему пину, чёрный — к нижнему.
- Включите пульт. Левый стик должен быть в нижнем положении.
- Подключите АКБ.
- Медленно поднимайте левый стик до тех пор, пока мотор не начнёт вращаться.
Если мотор вращается в неправильную сторону, поменяйте местами два любых фазных провода.
Направление вращения также можно изменить программно. Процесс описан в статье про прошивку ESC.
Повторите процесс для каждого мотора.
Перевод пульта в режим PPM
Полётный контроллер не может работать с пультом в режиме PWM, поэтому следует произвести перевод пульта в режим PPM.
- Убедитесь, что питание дрона выключено.
- Для входа в меню удерживайте нажатой кнопку «ОК».
- Кнопками Up/Down выбираем меню «System setup», кнопкой «ОК» подтвердите выбор.
- Выберите «RX Setup».
- Выберите «Output mode».
- Убедитесь, что в открывшемся меню выбран пункт «PPM».
- Чтобы сохранить настройки, удерживайте нажатой кнопку «Cancel».
Установка пластины для полётного контроллера
-
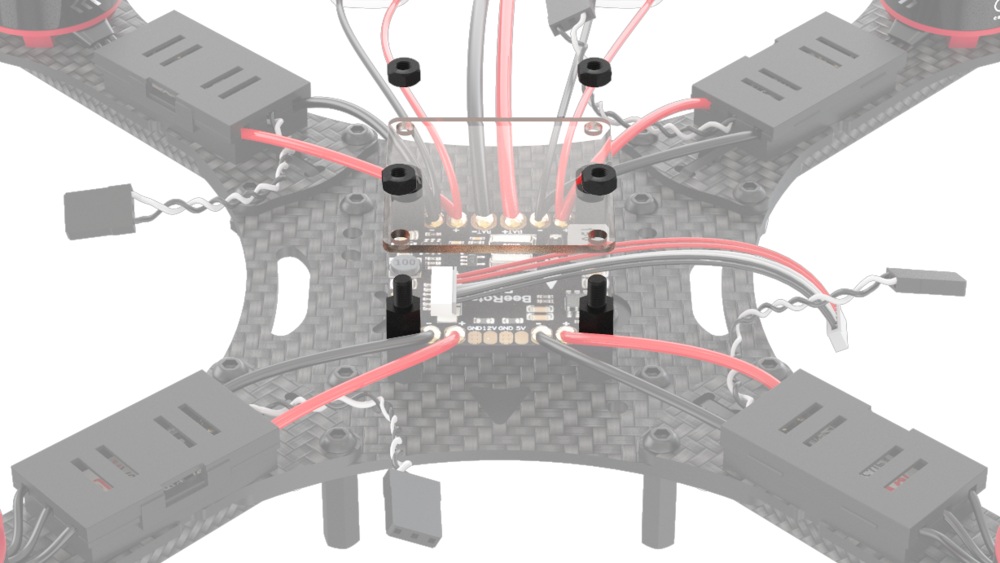
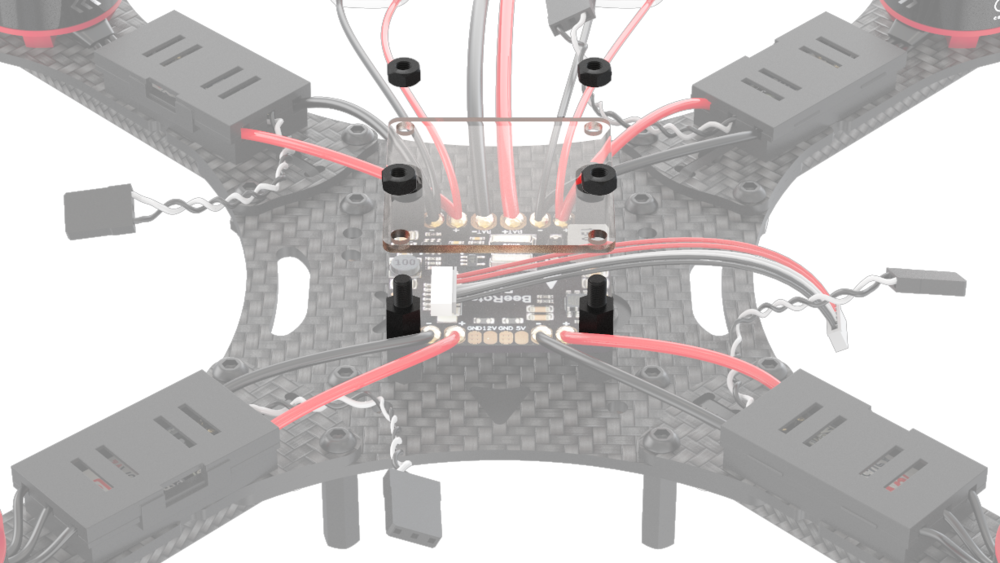
Установите 4 стойки «папа-мама» 6 мм на PDB.
-
Подключите шлейф питания к PDB.
-
Установите поликарбонатную пластину на стойки и зафиксируйте нейлоновыми гайками.
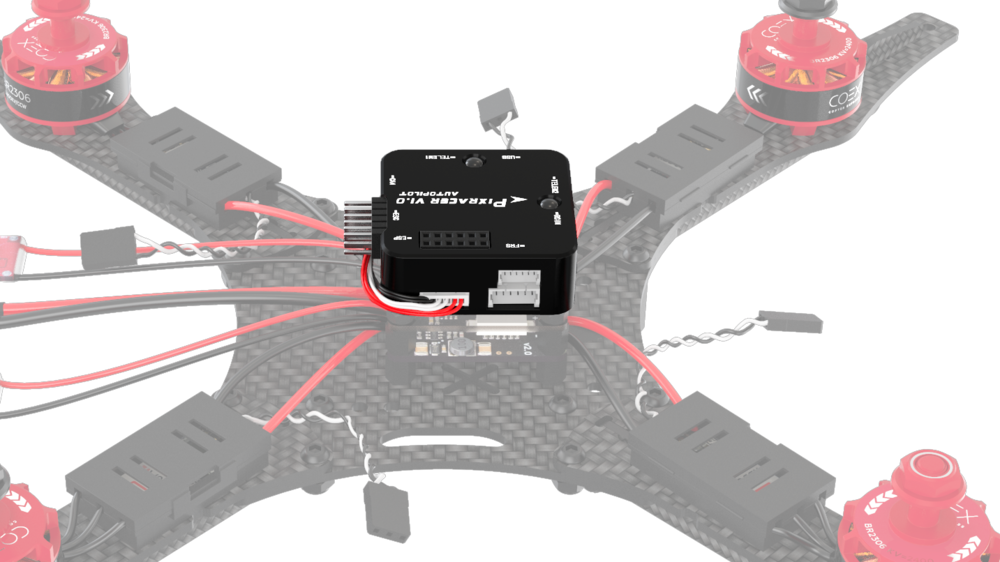
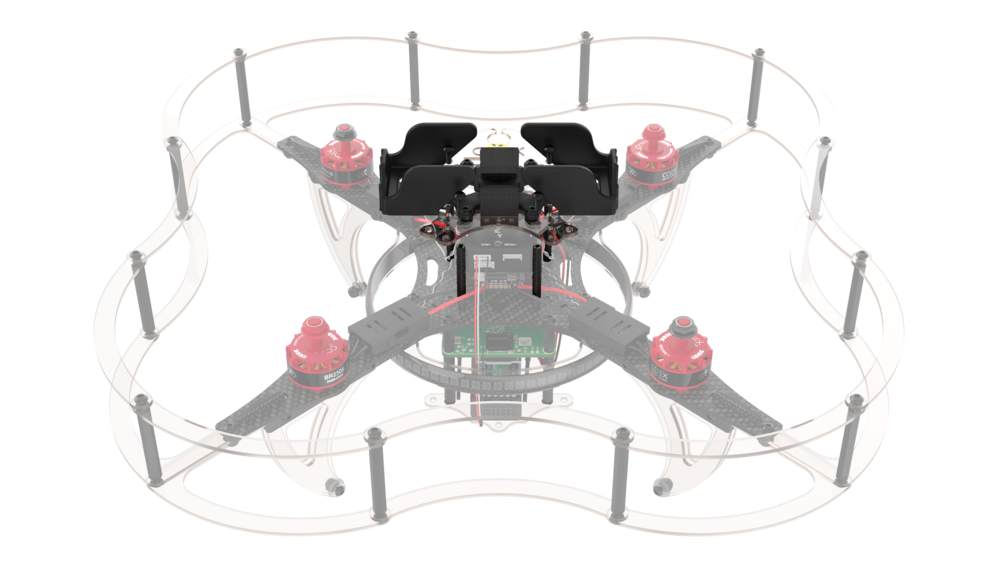
Установка полётного контроллера
-
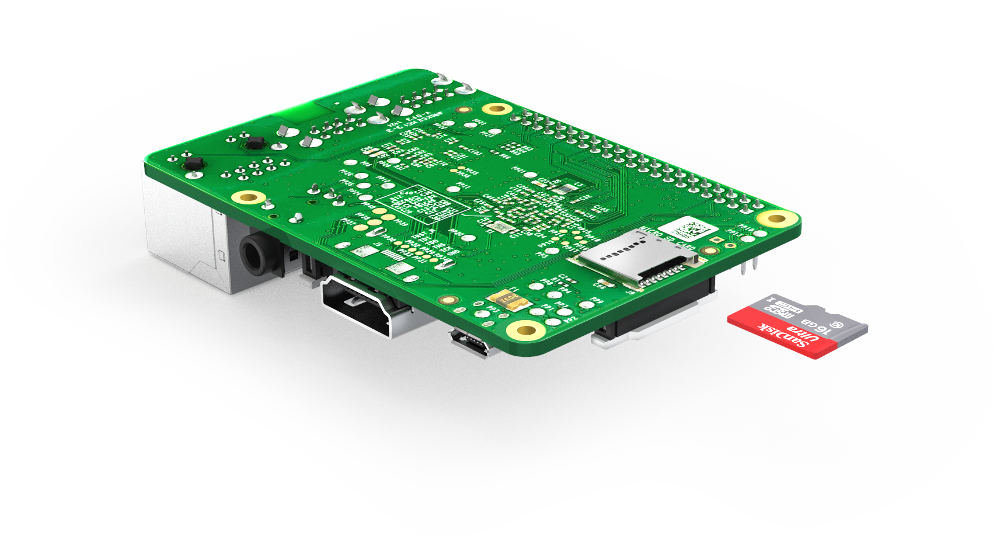
Вставьте карту microSD в полётный контроллер.
-
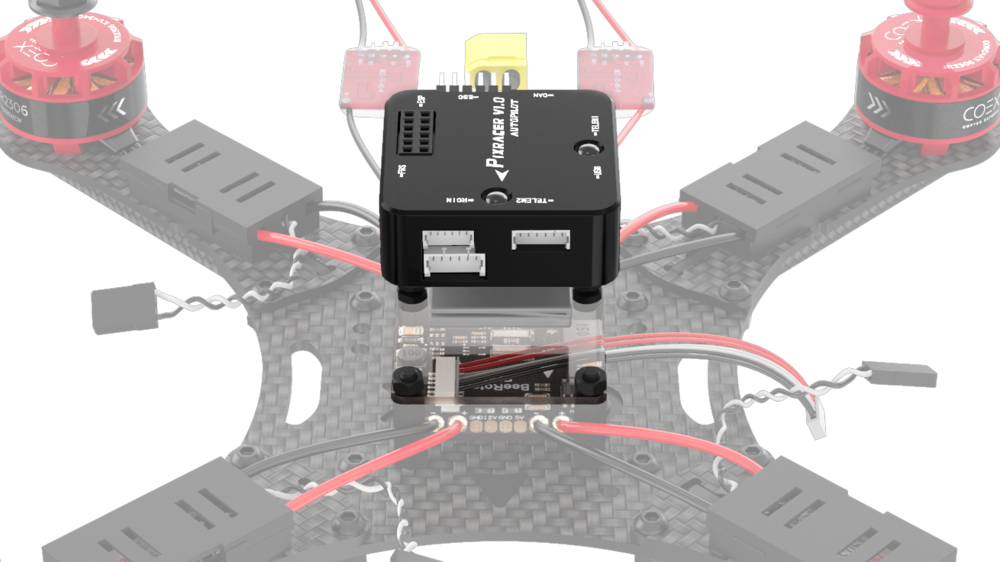
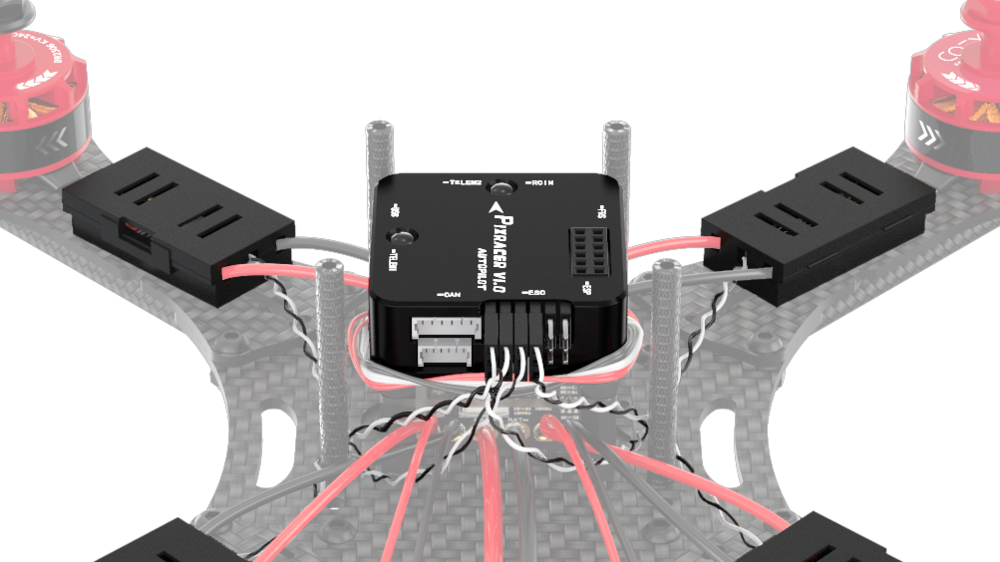
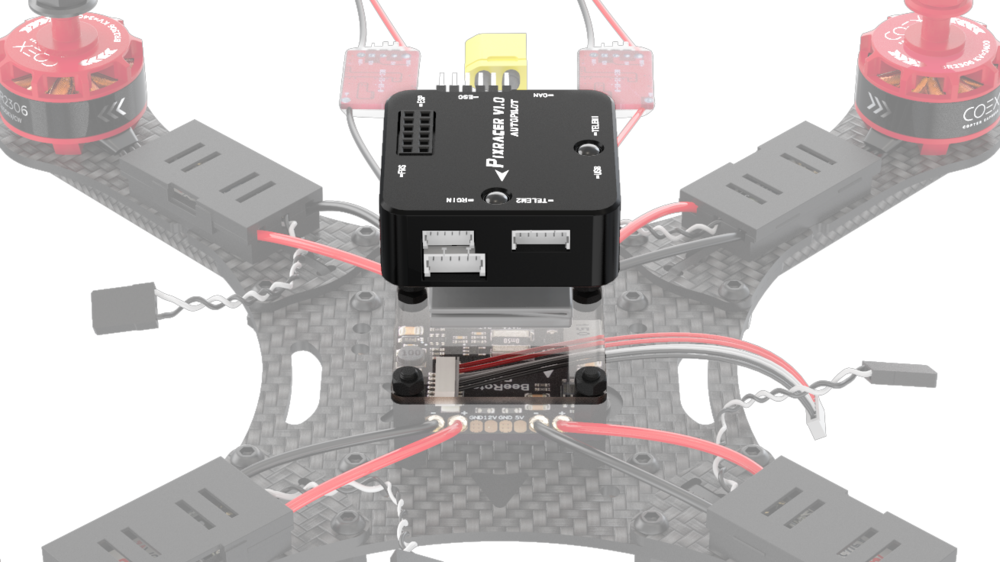
Установите полетный контроллер на пластину с помощью двухстороннего скотча.
-
Стрелки на полетном контроллере и центральной деке должны быть направлены в одну сторону.
-
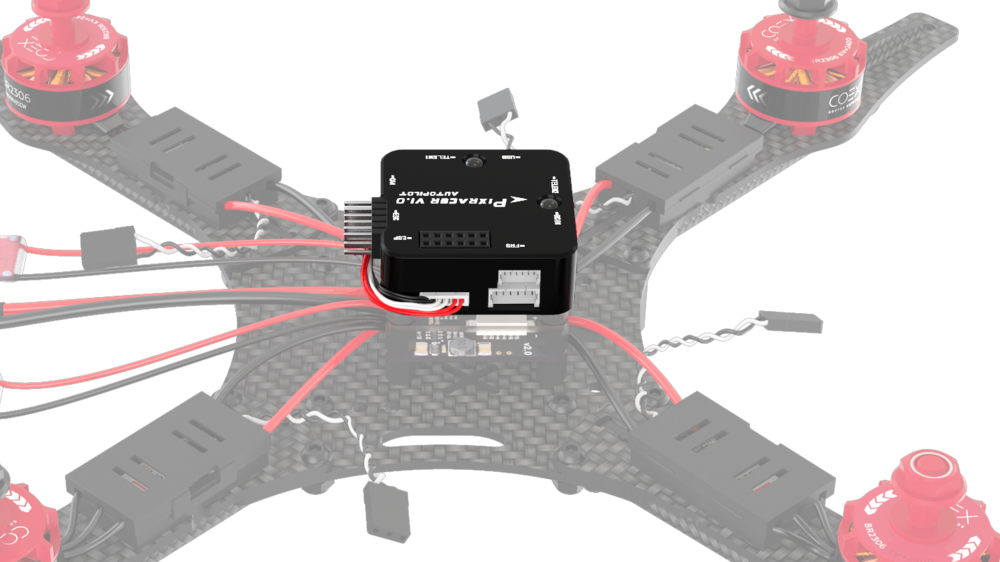
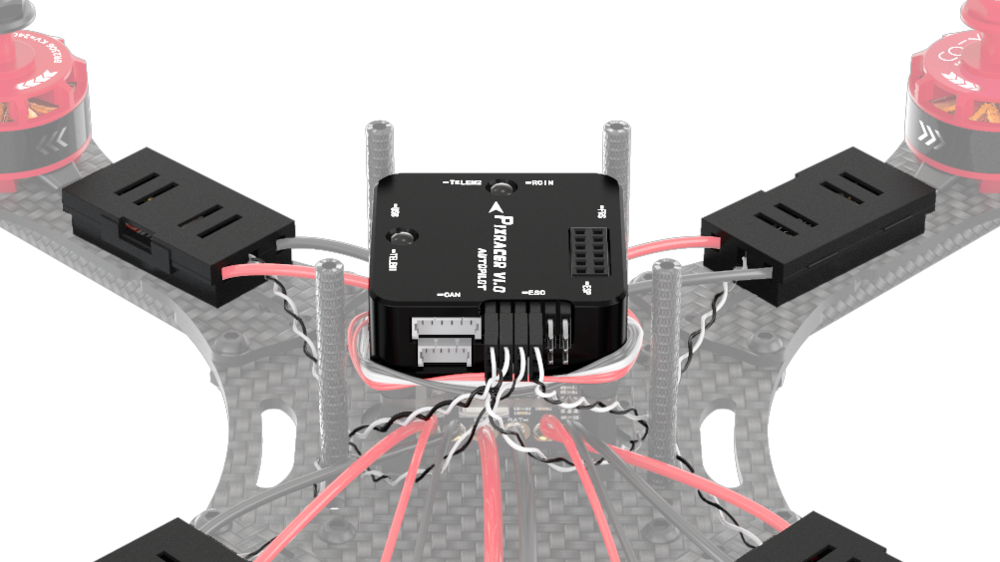
Подключите шлейф питания PDB к разъему «POWER» полетного контроллера, закрутив его в «косичку» для взаимной фиксации проводов.
-
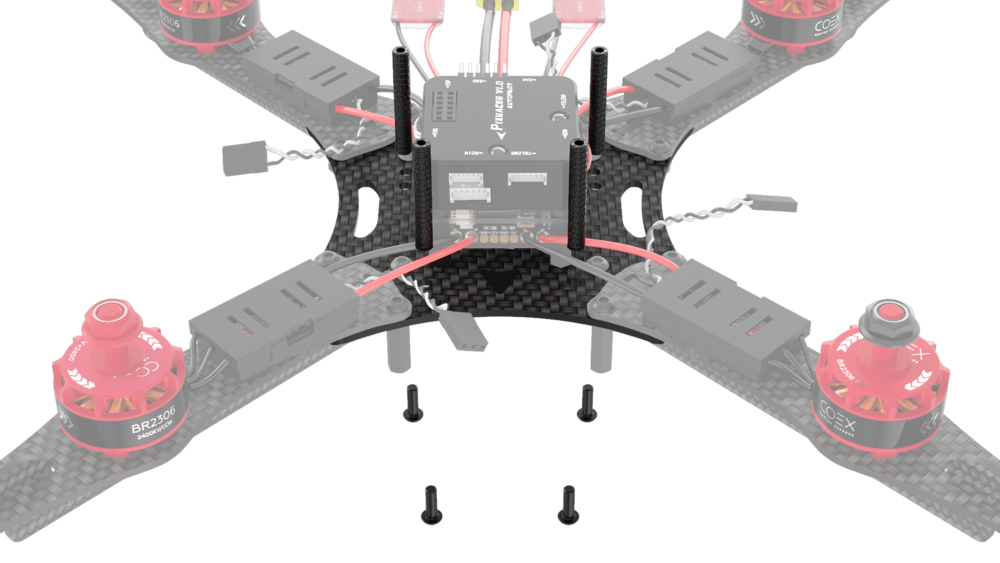
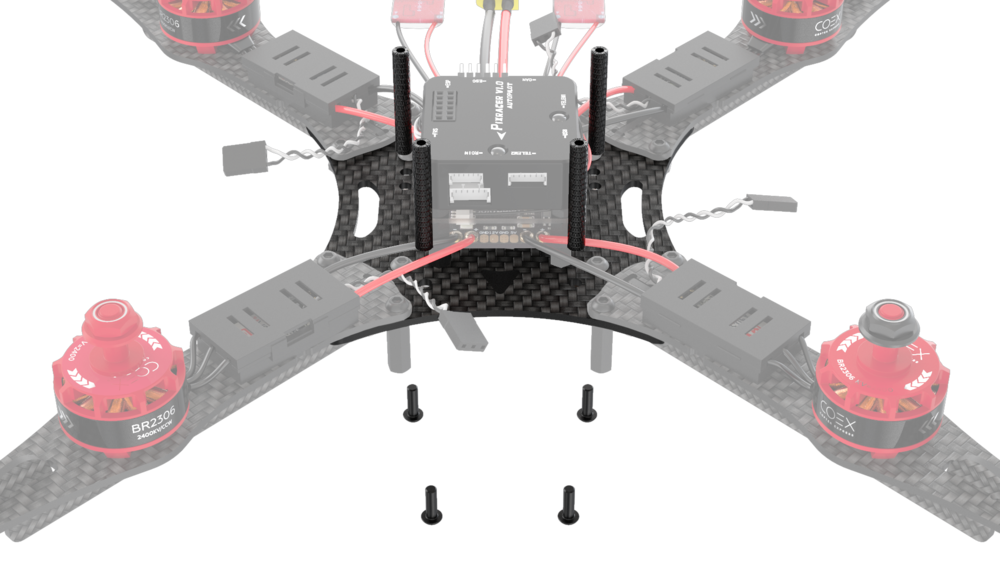
Установите 4 алюминиевые стойки 40 мм с помощью винтов М3х10.
-
Подключите сигнальные провода регуляторов к полетному контроллеру следующим образом:
-
Установите 2 стойки «мама-мама» 15 мм на центральную деку с помощью винтов М3х8.
-
Другие 2 стойки были установлены ранее в разделе «Сборка рамы», п. 2.




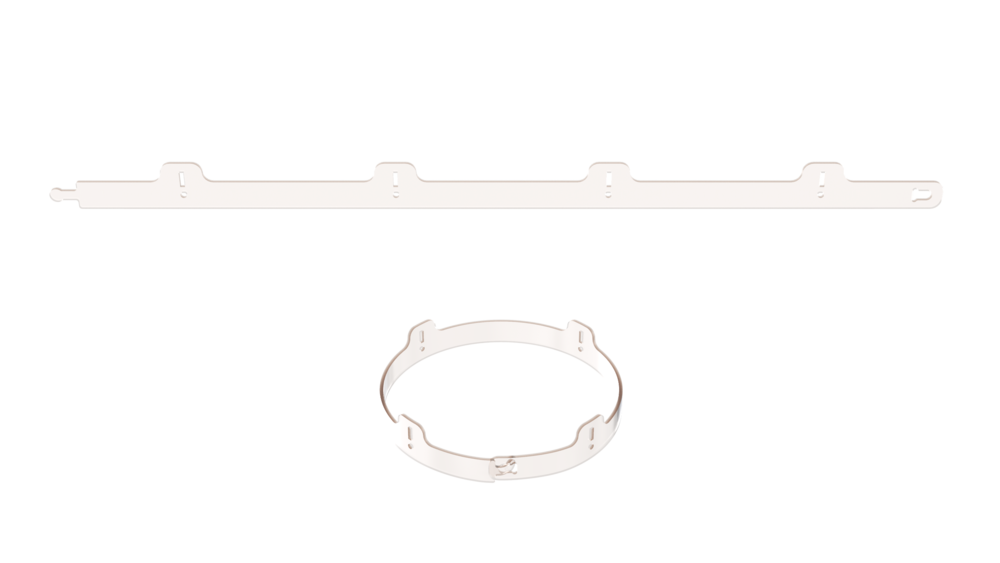
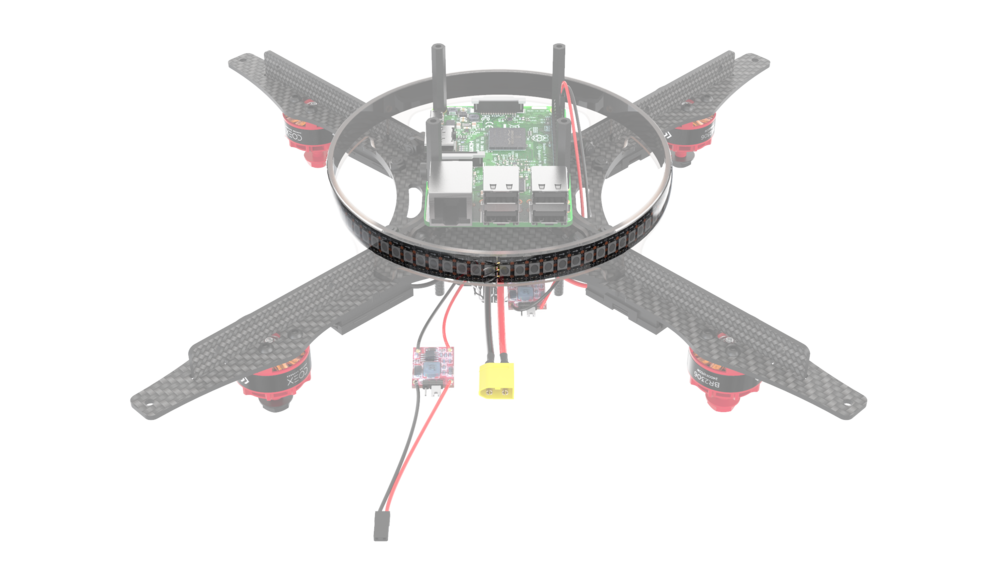
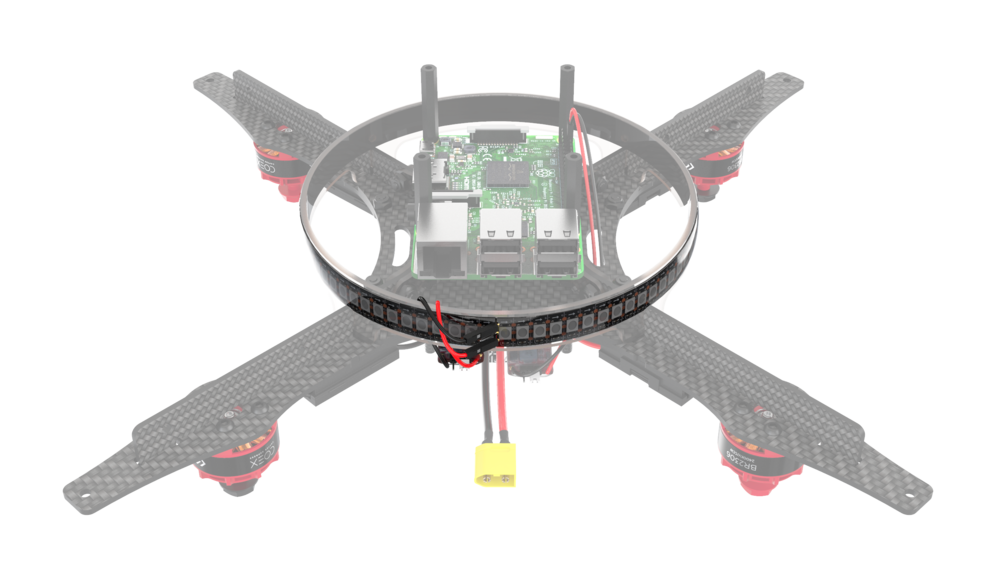
Установка обруча для светодиодной ленты
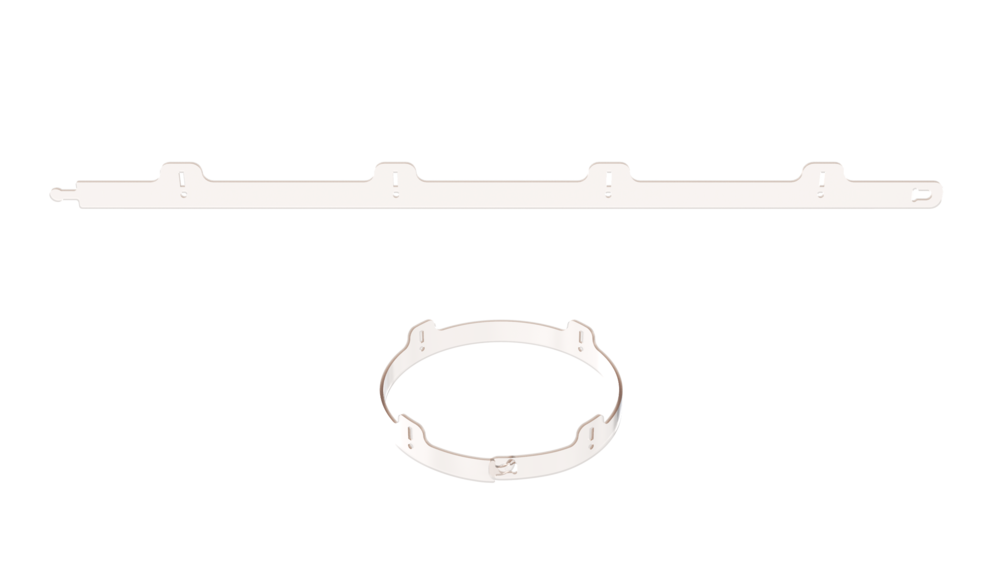
- Согните поликарбонатную заготовку в обруч и зафиксируйте ее концы в замке.
-
Установите обруч на раму, используя пазы.

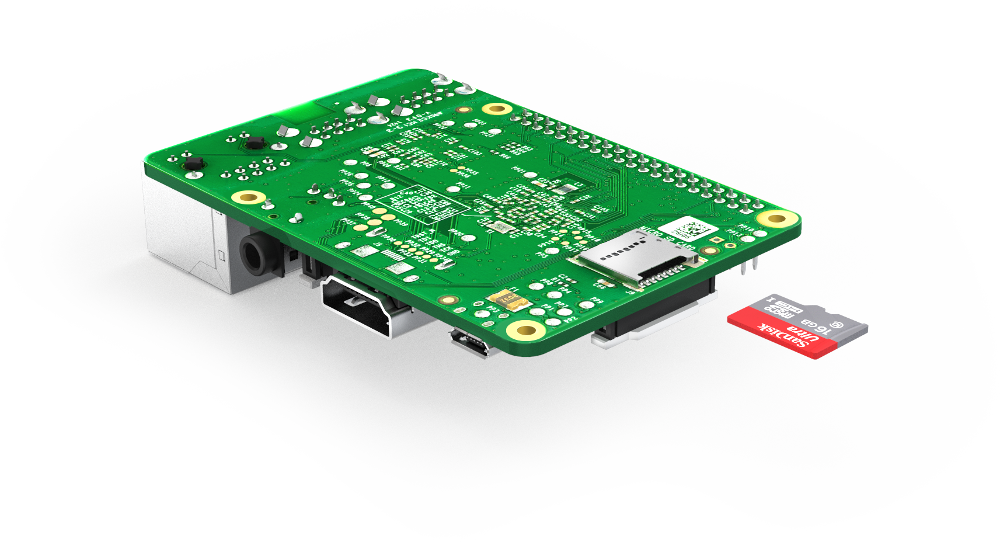
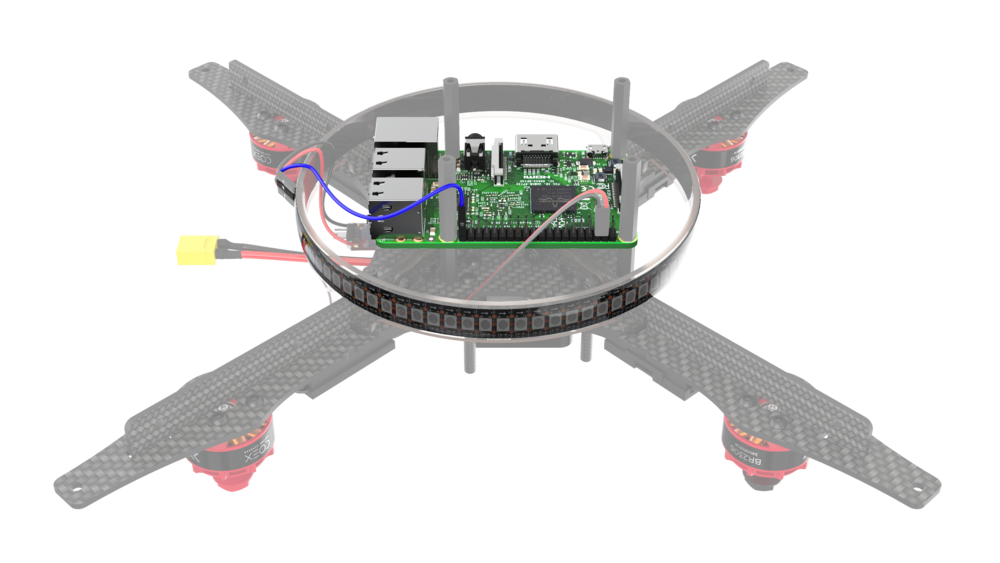
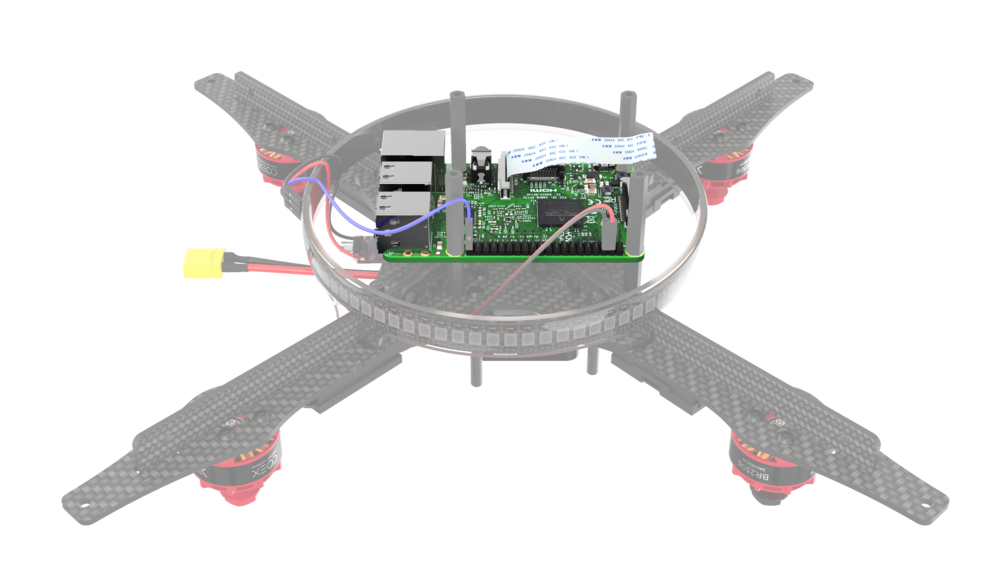
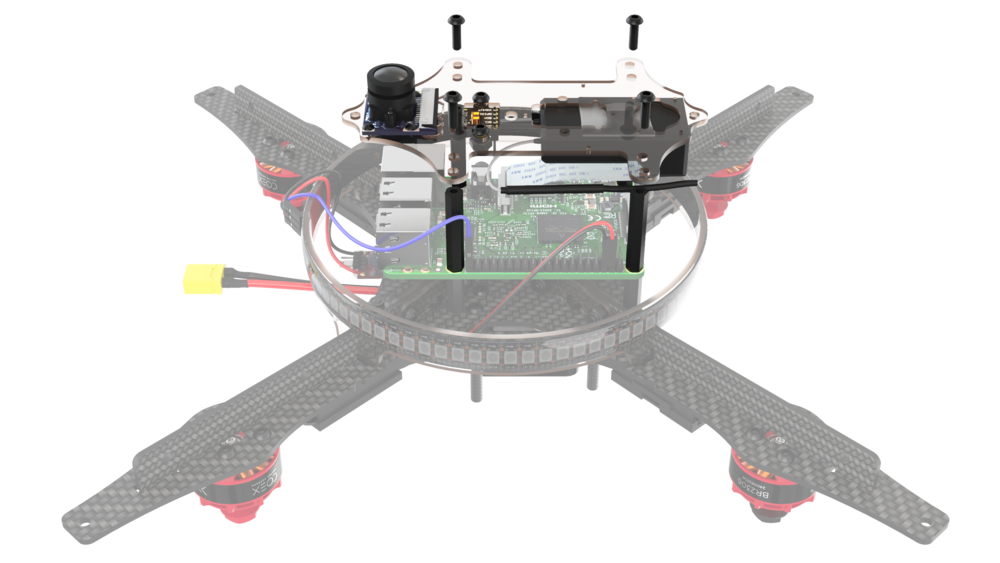
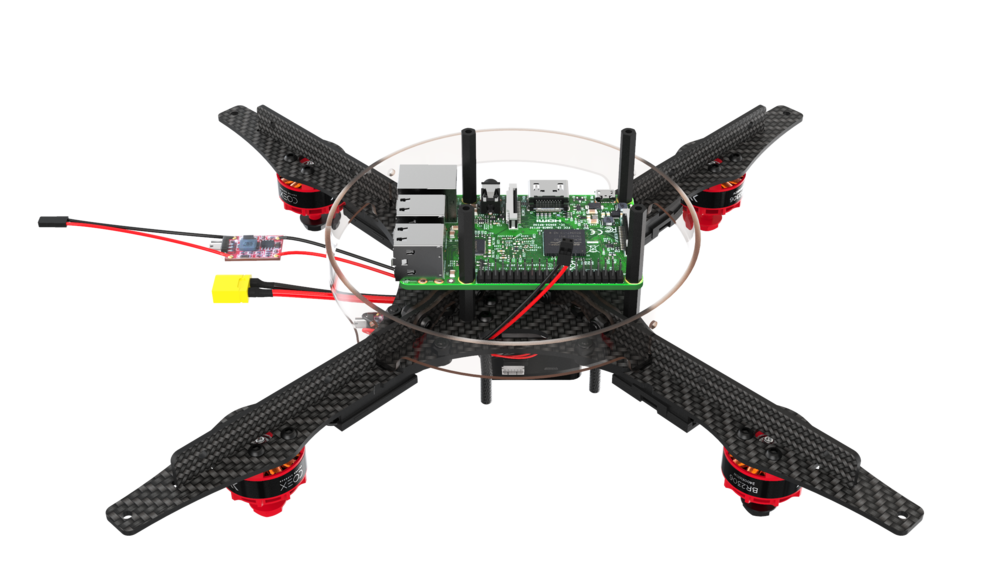
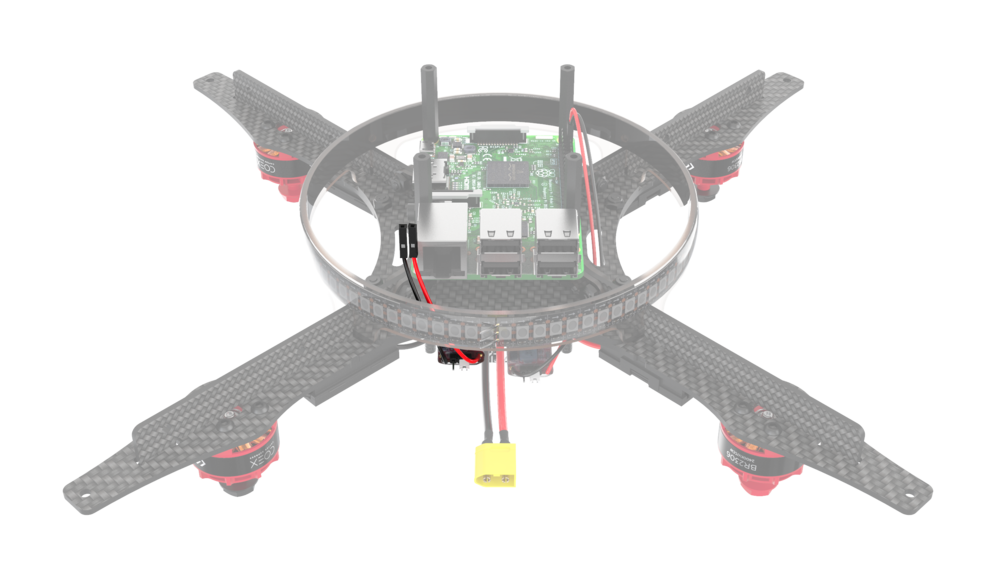
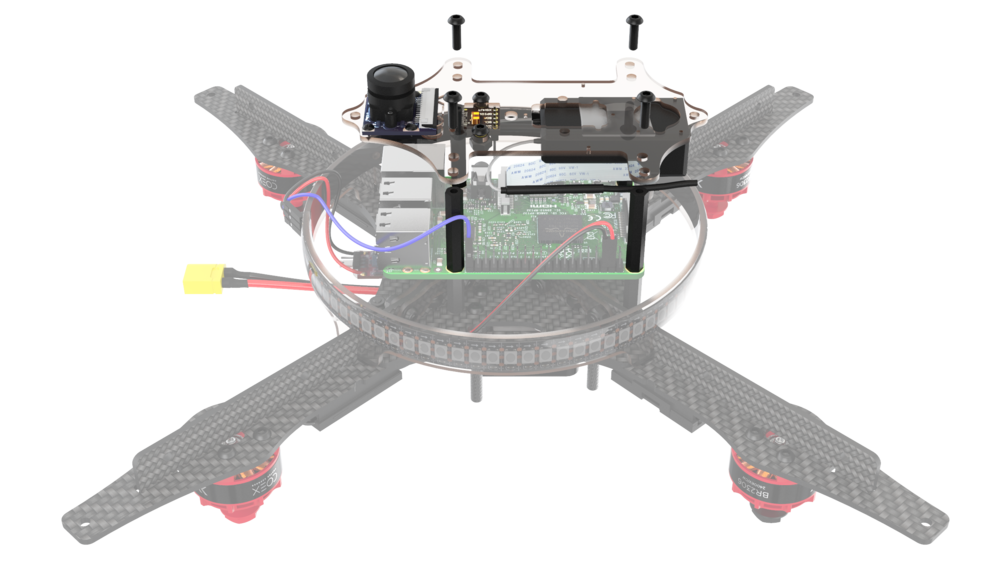
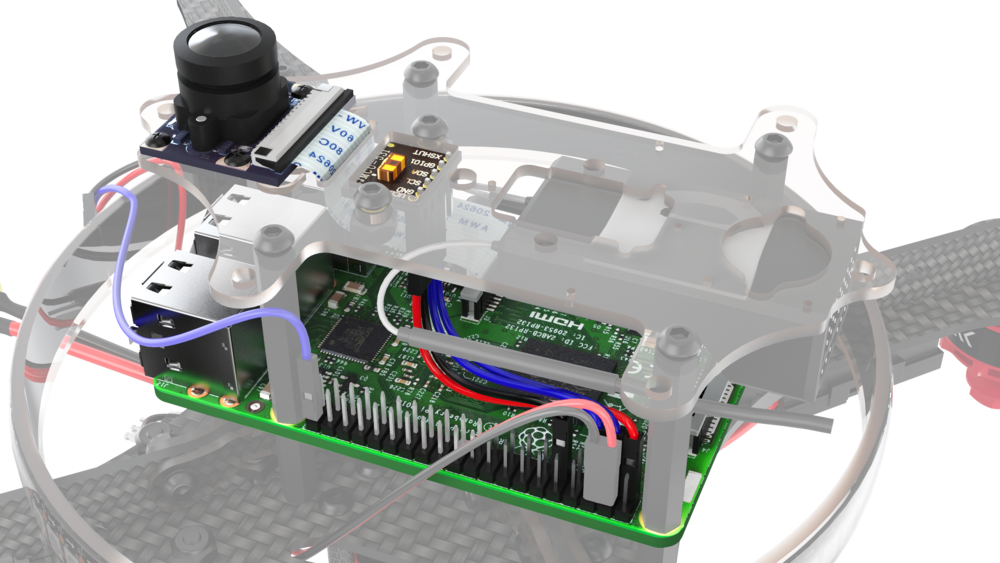
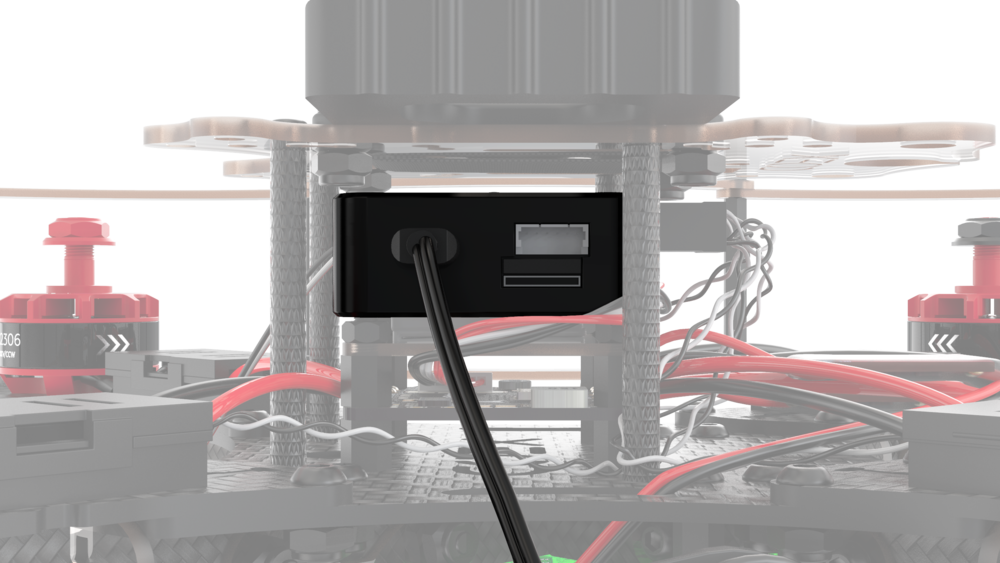
Установка Raspberry Pi
-
Вставьте карту microSD с записанным образом в Raspberry Pi
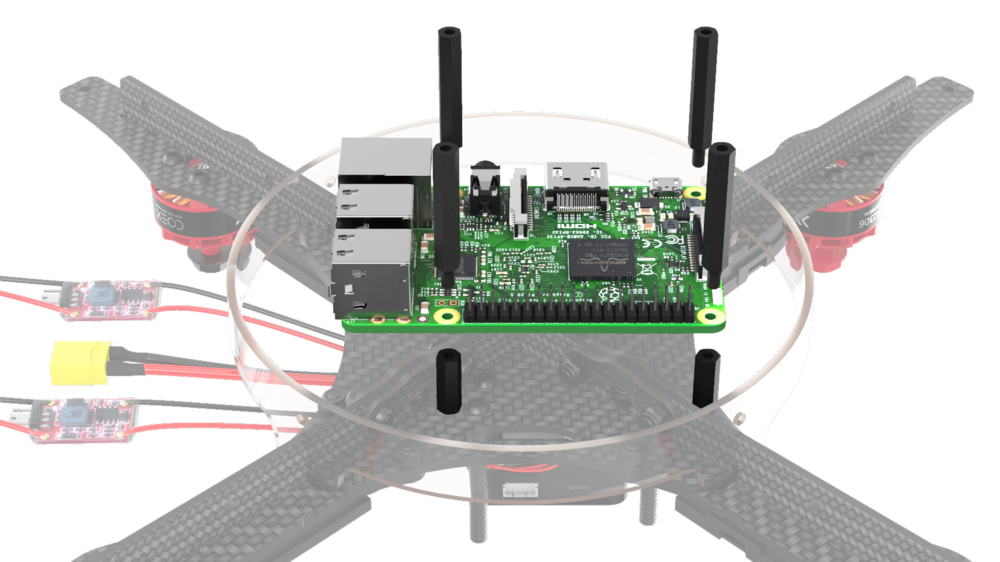
-
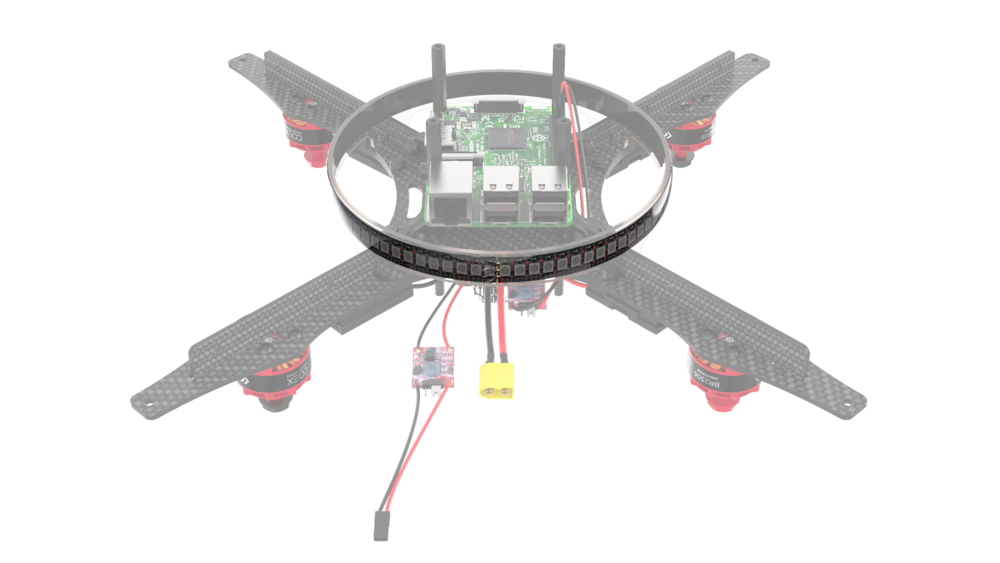
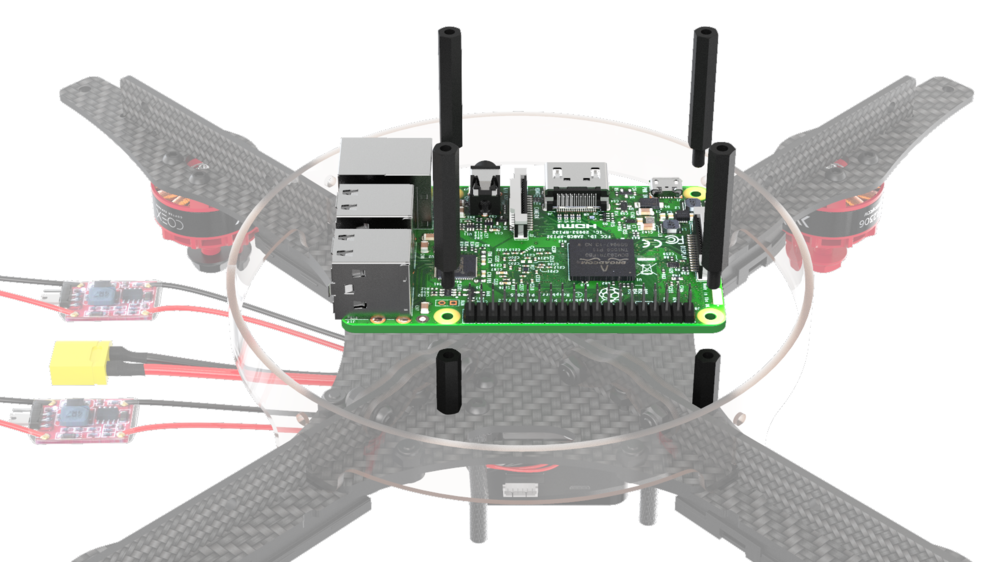
Установите плату Raspberry Pi на стойки, используя 4 стойки «папа-мама».
-
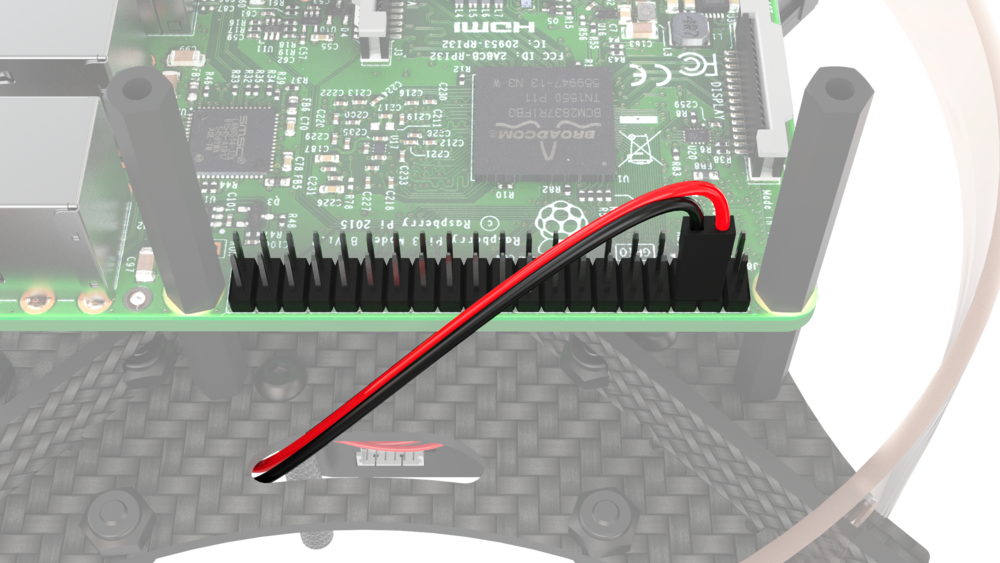
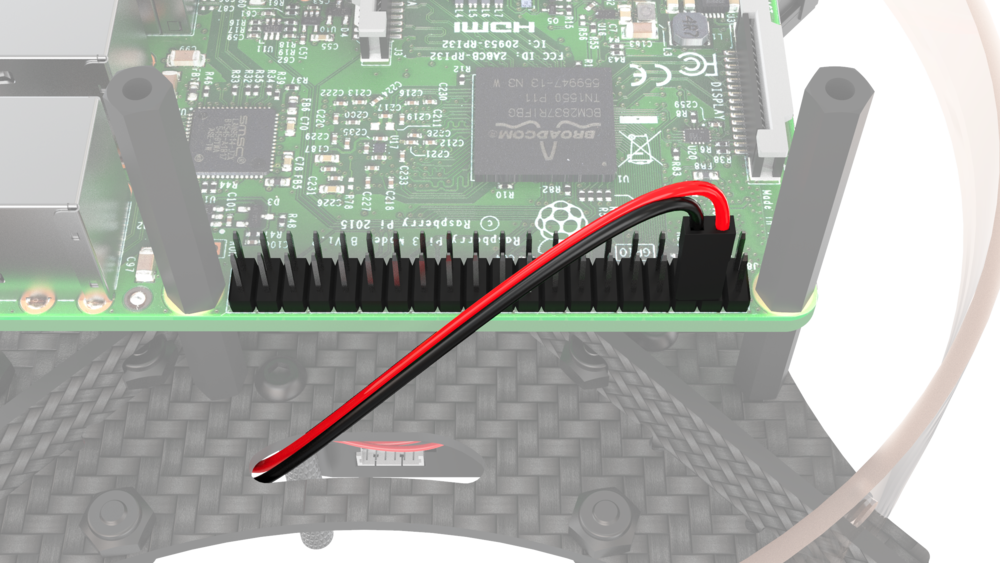
Протяните провода от BEC через паз в центральной раме.
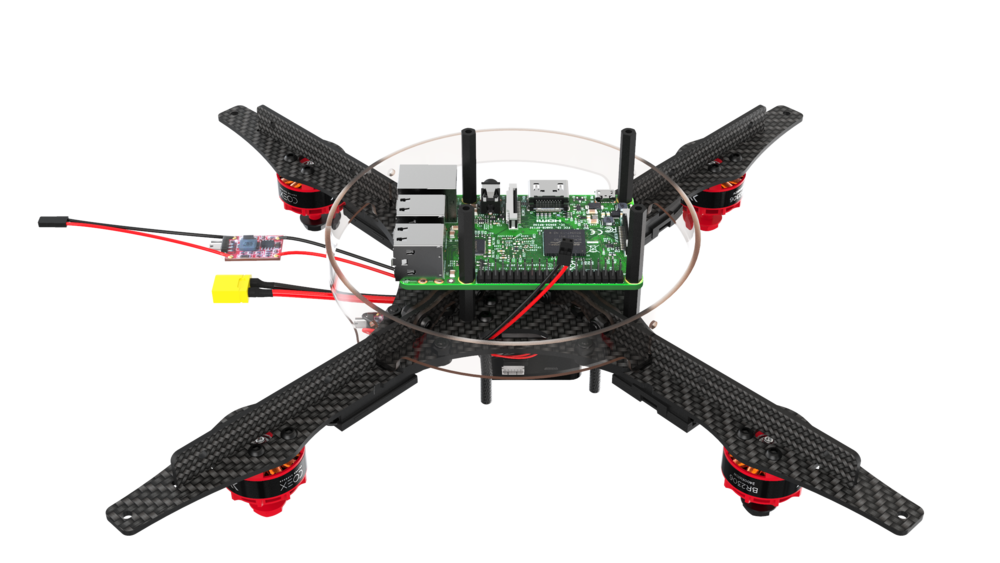
-
Подключите провод питания от BEC к Raspberry, согласно схеме:
Установка светодиодной ленты на обруч
-
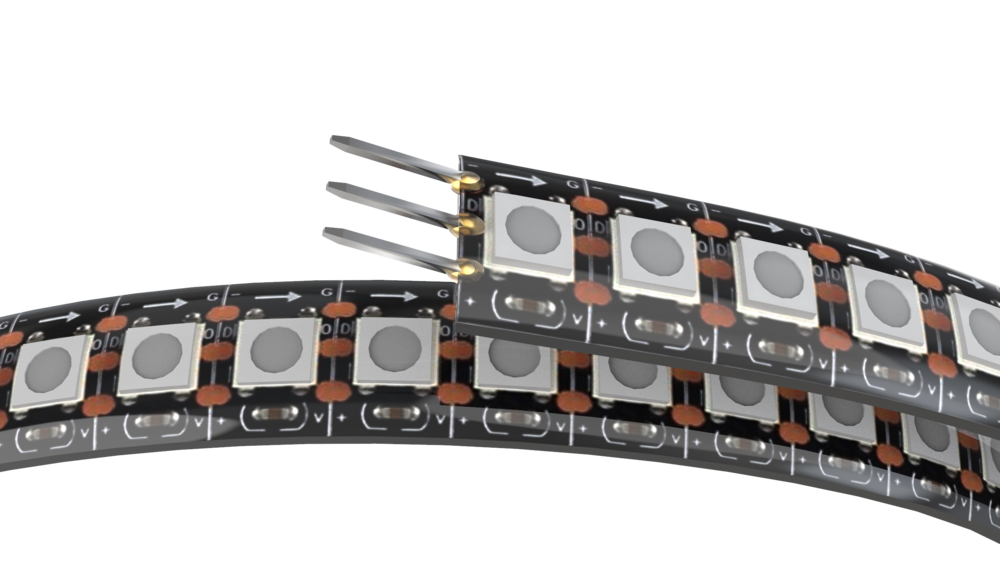
Проверьте наличие напаянных пинов на контактах ленты (при отсутствии — напаять).
-
Установите светодиодную ленту на обруч (используя клеевой слой на ленте) так, чтобы контакты были в задней части коптера. Для дополнительной фиксации используйте стяжки.


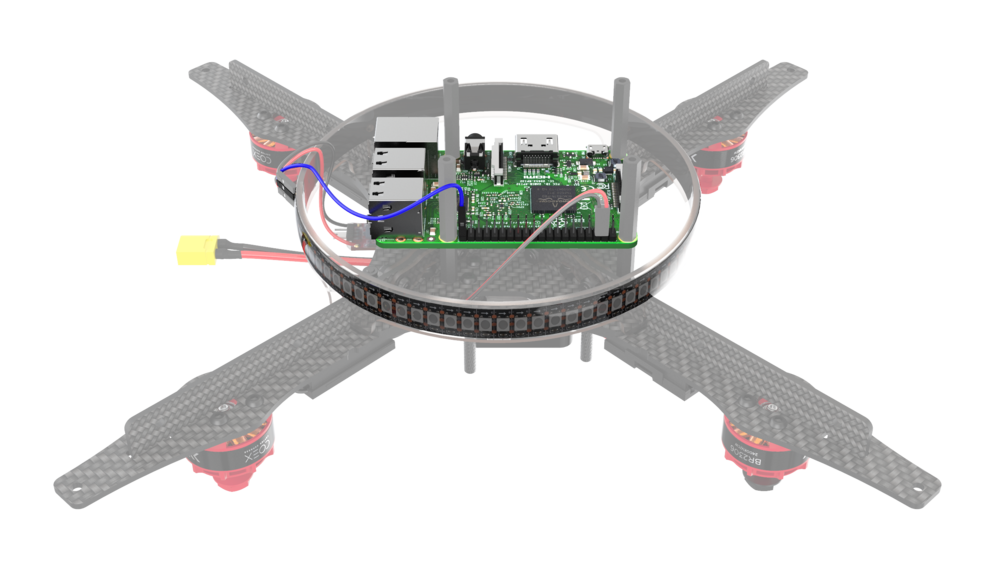
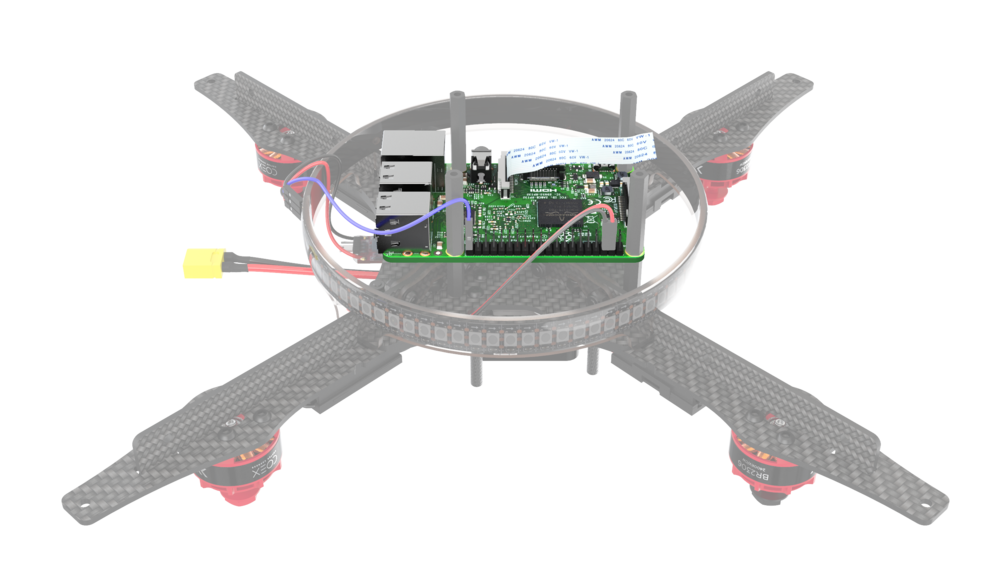
Подключение светодиодной ленты к Raspberry Pi
-
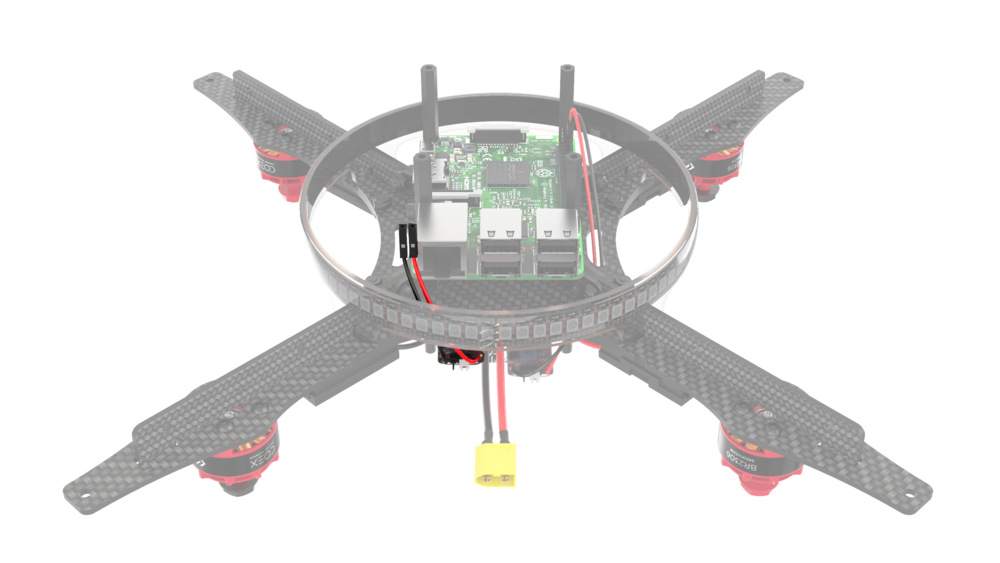
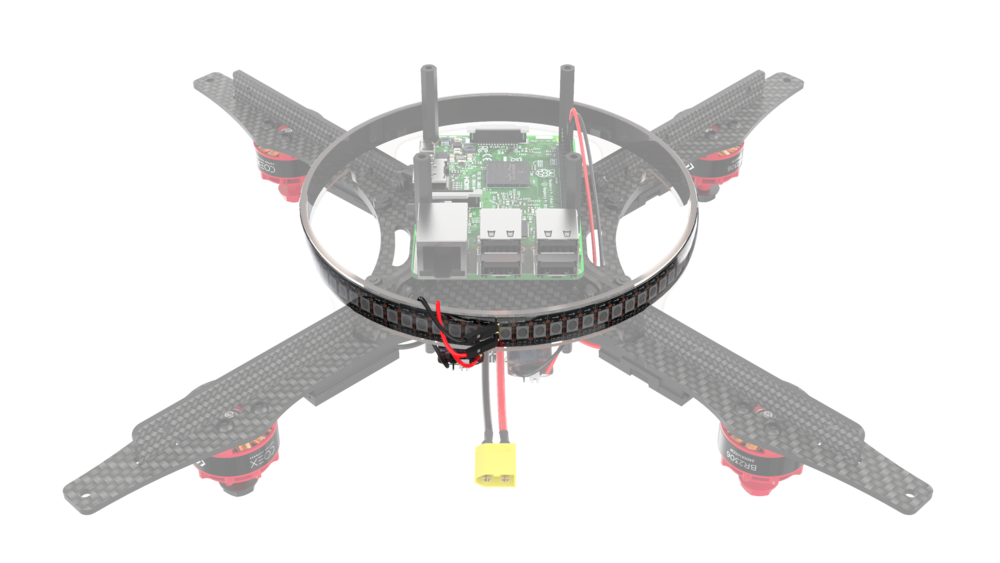
Питание для ленты берется от второго BEC. Подключите контакты «-» и «+» к Ground и 5v на ленте соответственно.
-
Подключите контакт D к GPIO-пину на Raspberry. Рекомендуется использовать пин GPIO21.
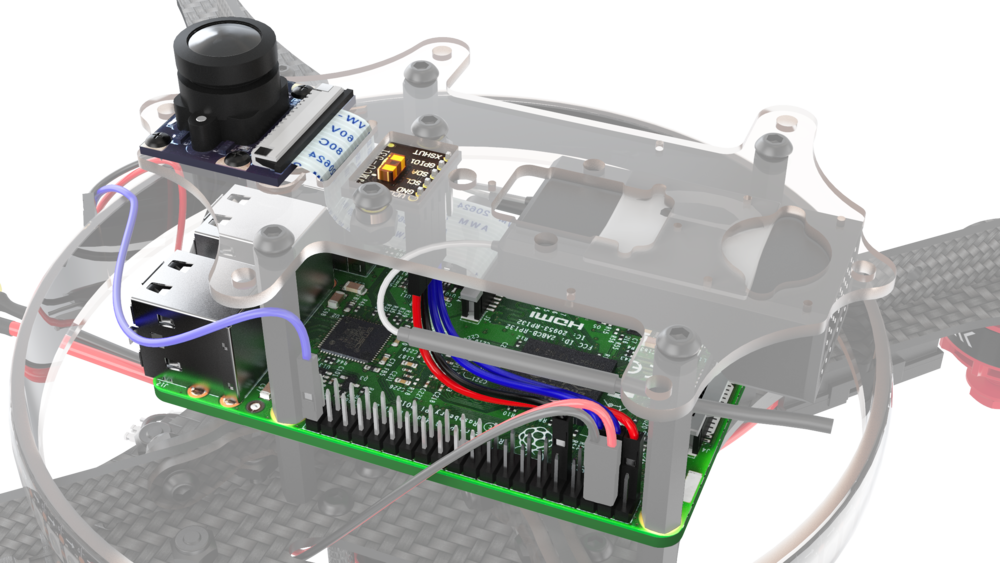
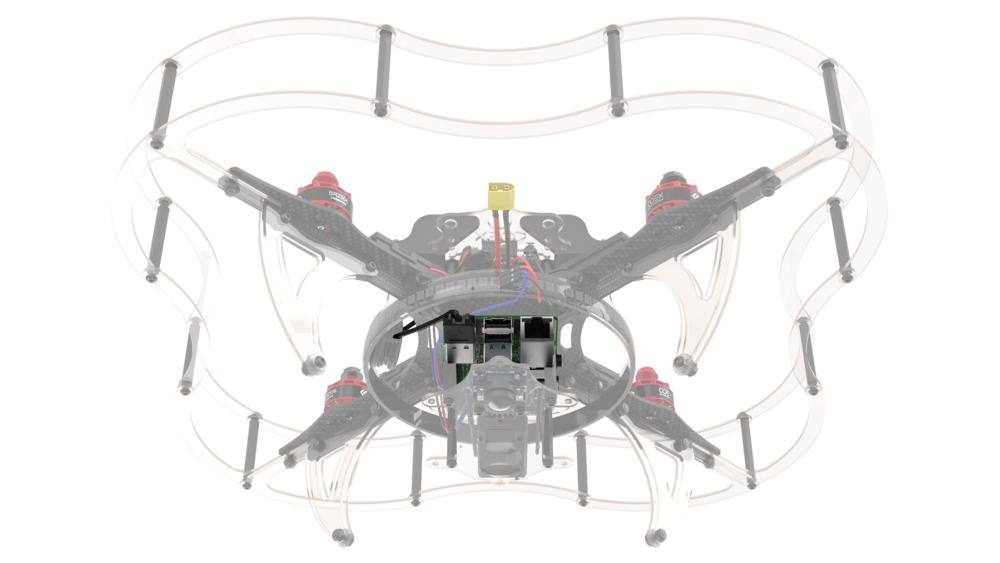
Установка шлейфа для камеры
- Поднимите защелку.
- Подключите шлейф.
- Закройте защелку.
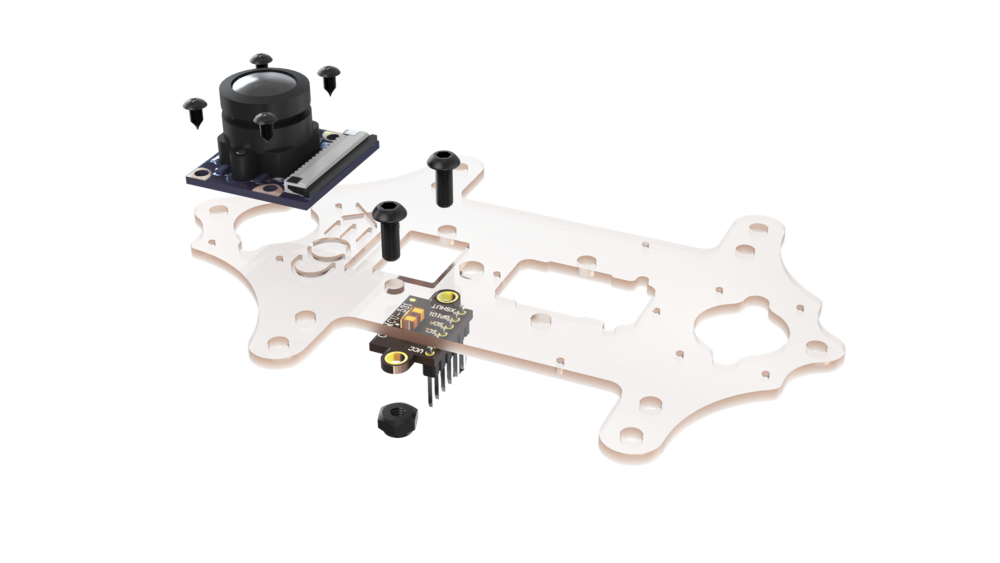
Установка оборудования на нижнюю монтажную деку
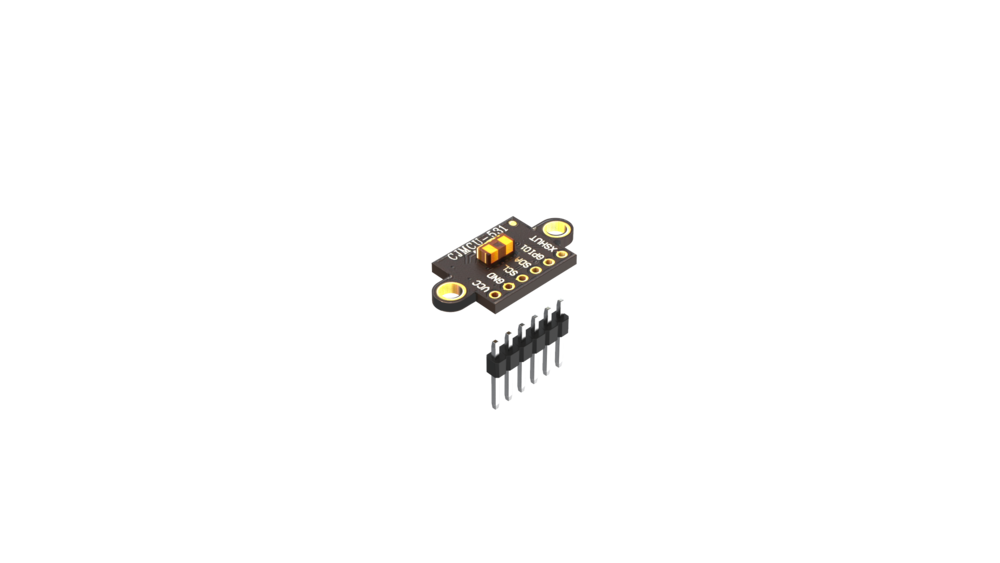
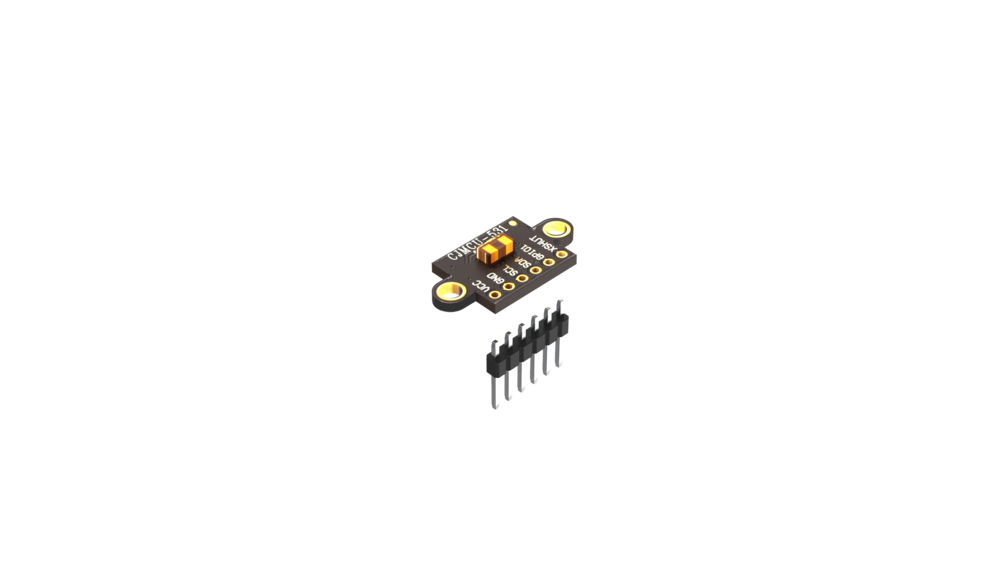
- Подготовьте лазерный дальномер к монтажу, предварительно напаяв на него контакты.
-
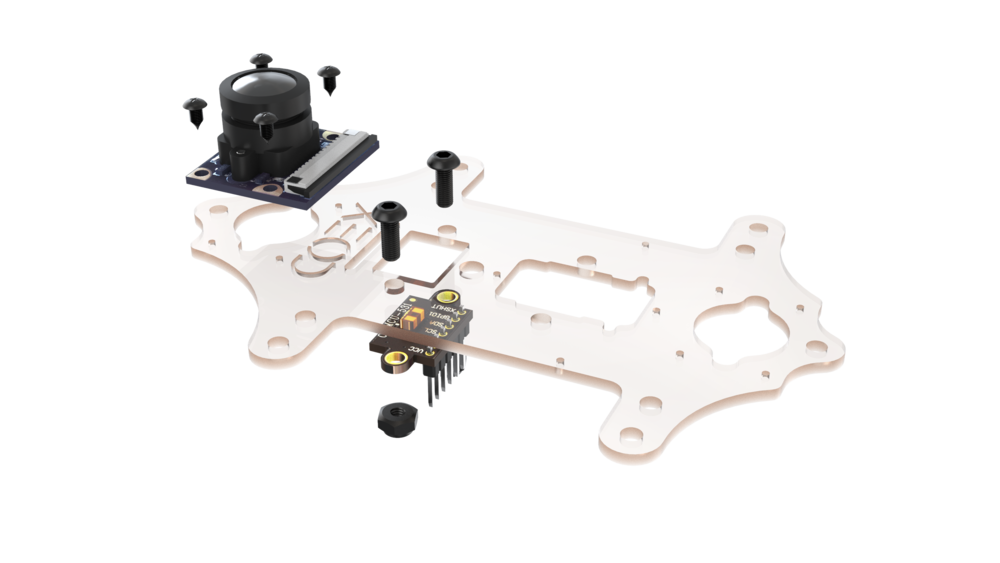
Установите камеру на 4 самореза 2х5.
Убедитесь, что саморезы не касаются деталей на печатной плате камеры. В противном случае камера может не заработать.
-
Установить на деку лазерный дальномер с помощью 2 винтов М3х8 и стальных гаек.
-
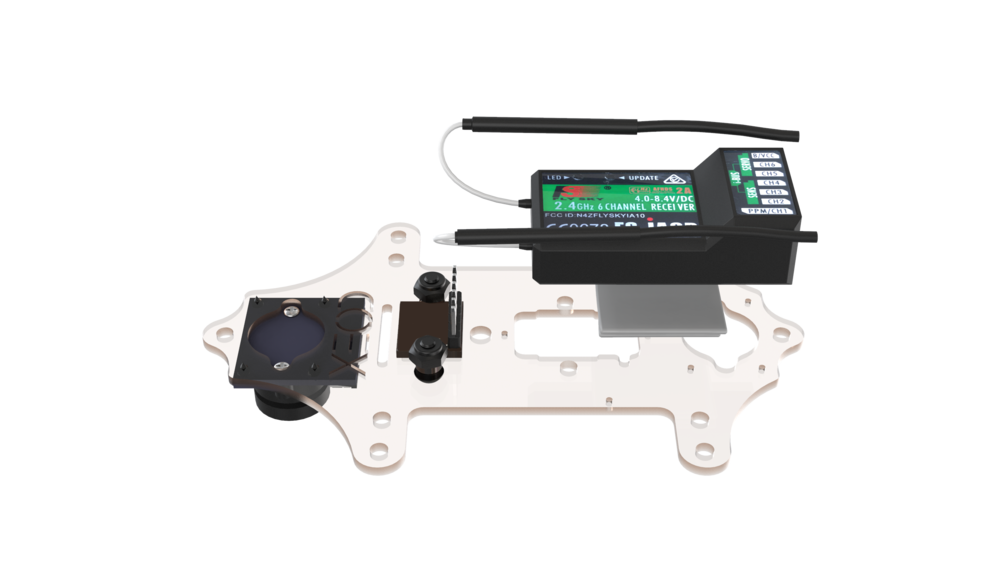
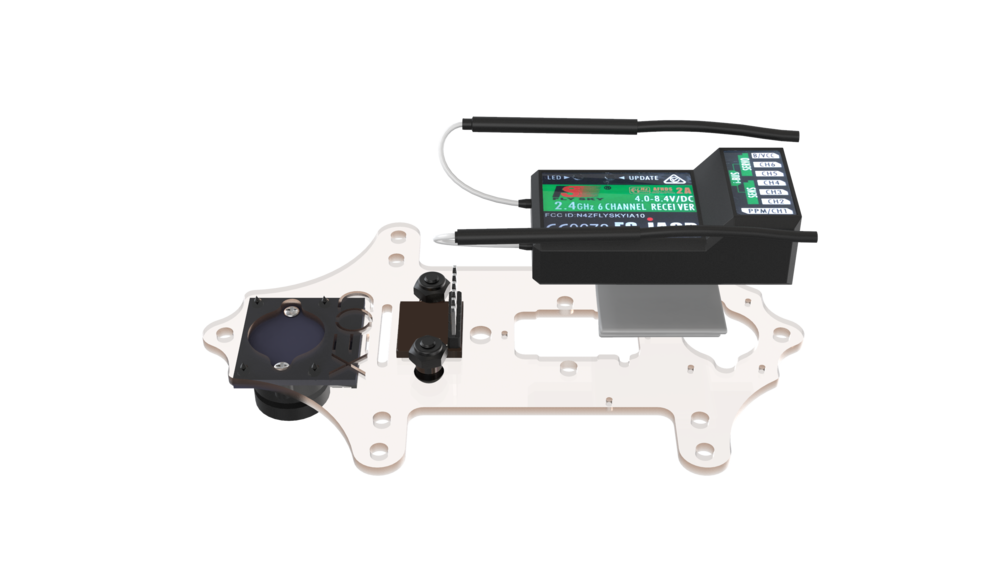
Установите приемник на нижнюю деку с помощью двухстороннего скотча.
-
Установите нижнюю деку с помощью 4 винтов М3х10.
-
Подключите шлейф к камере.
-
Подключите лазерный дальномер к Raspberry Pi с помощью проводов типа «мама-мама»:
- Разъем VCC к пину 1 (3.3v).
- Разъем GND к пину 9 (Ground).
- Разъем SDA к пину 3 (GPIO02).
-
Разъем SCL к пину 5 (GPIO03).
Монтаж ножек
-
Установите 8 ножек с помощью винтов М3х10 и стальных гаек.
-
Установите демпфирующие прокладки на ножки с помощью винтов М3х10 и стальных гаек.
Подключение кабелей
-
Подключите кабель радиоприемника в RCIN разъем полетного контроллера.
-
Подключите кабель к приемнику, соответственно изображению.


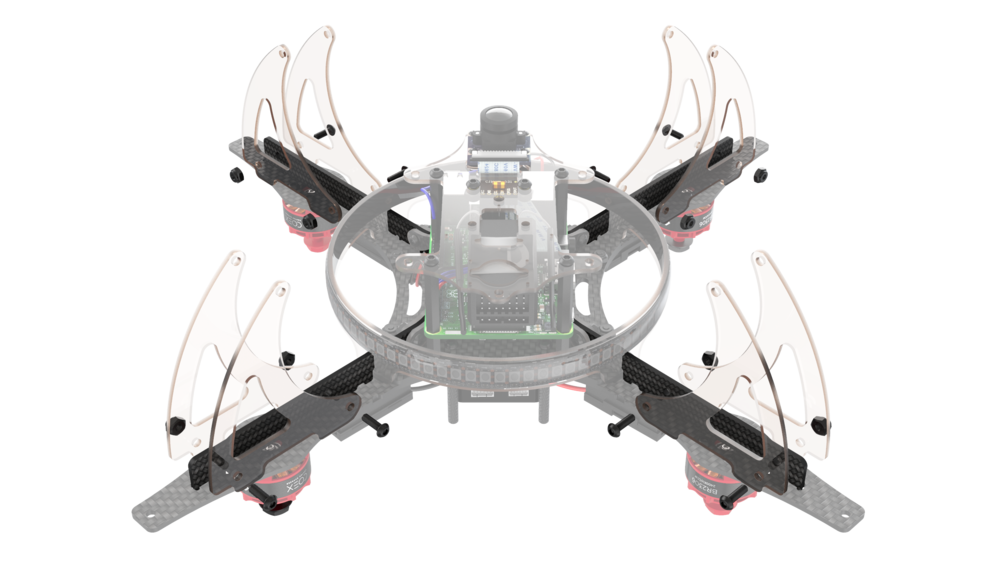
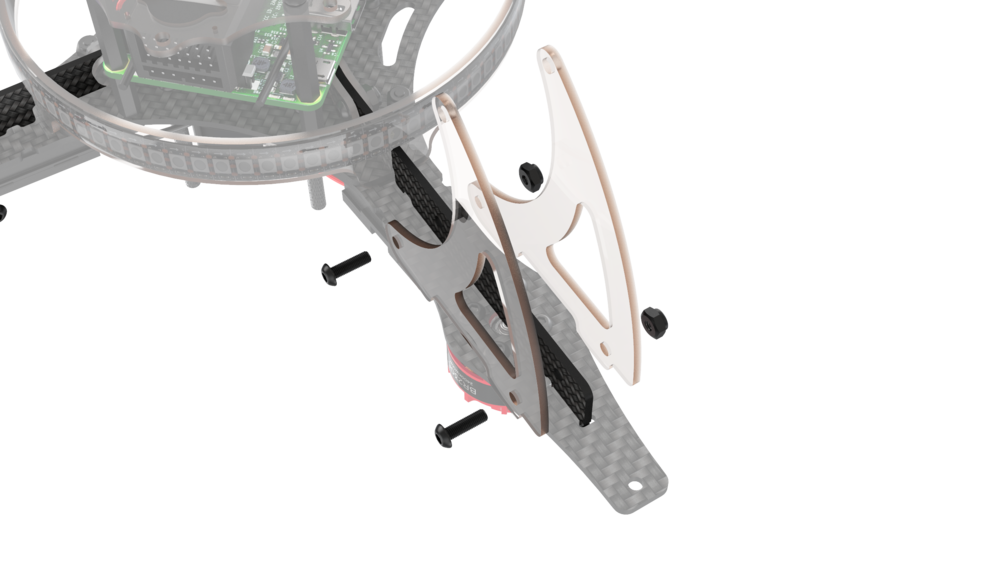
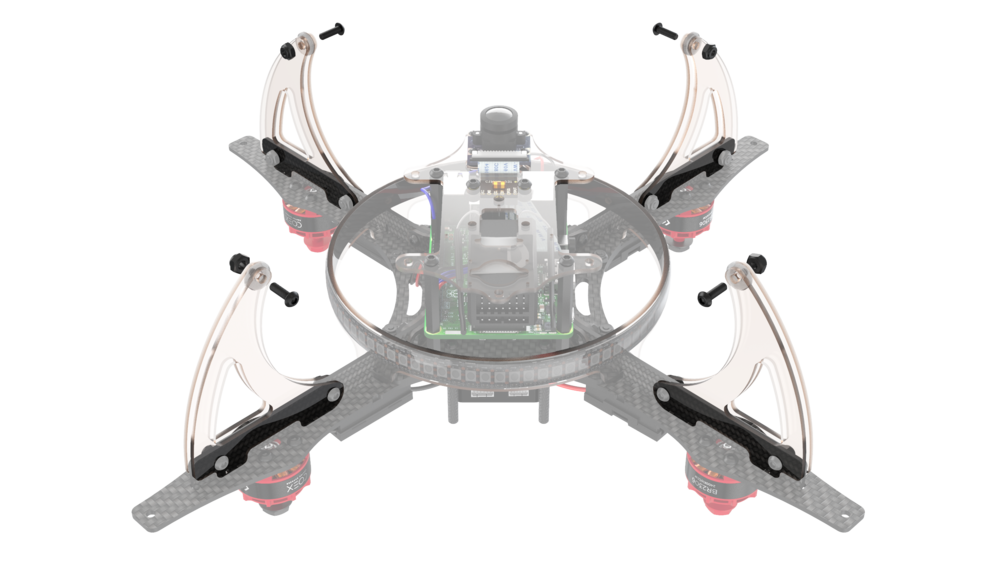
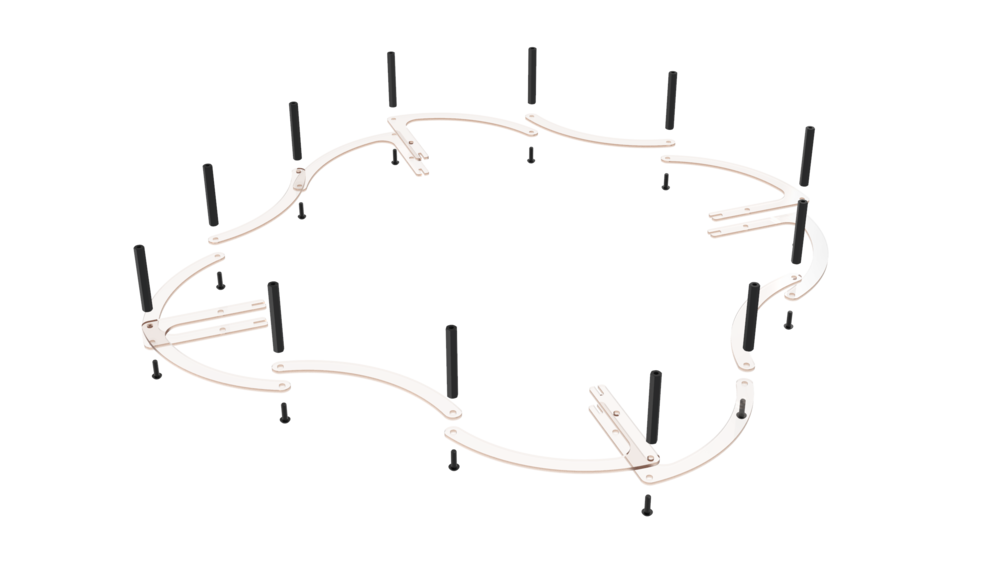
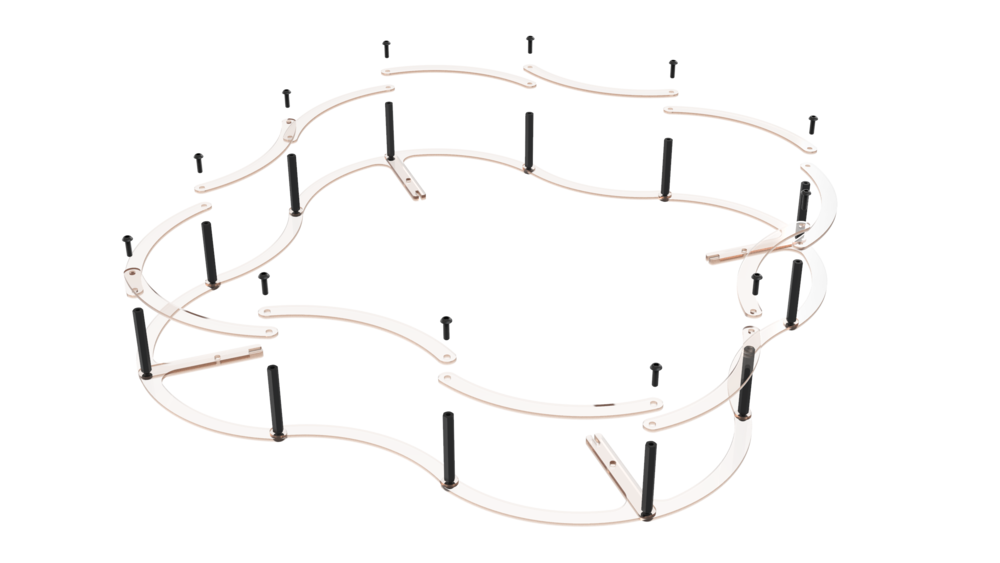
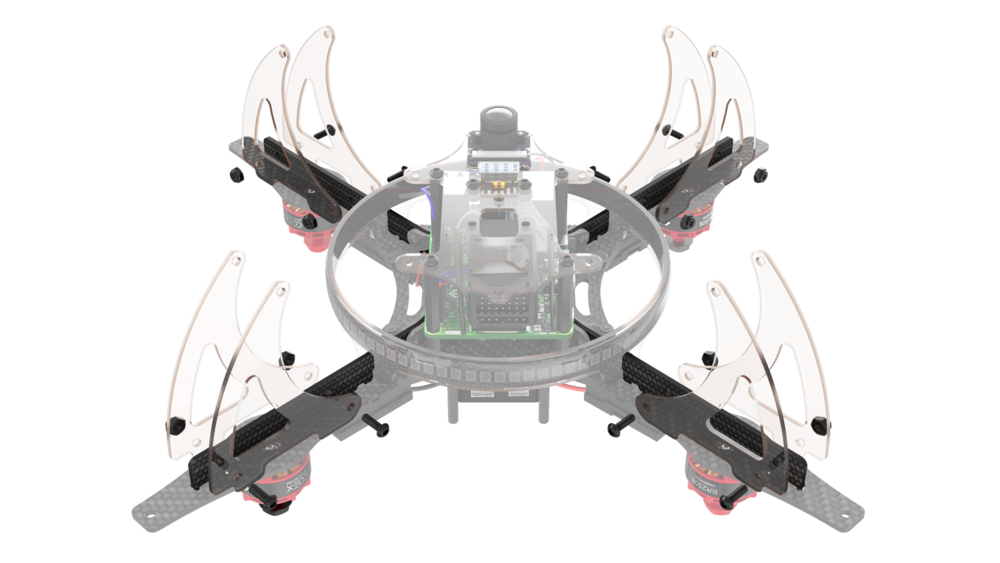
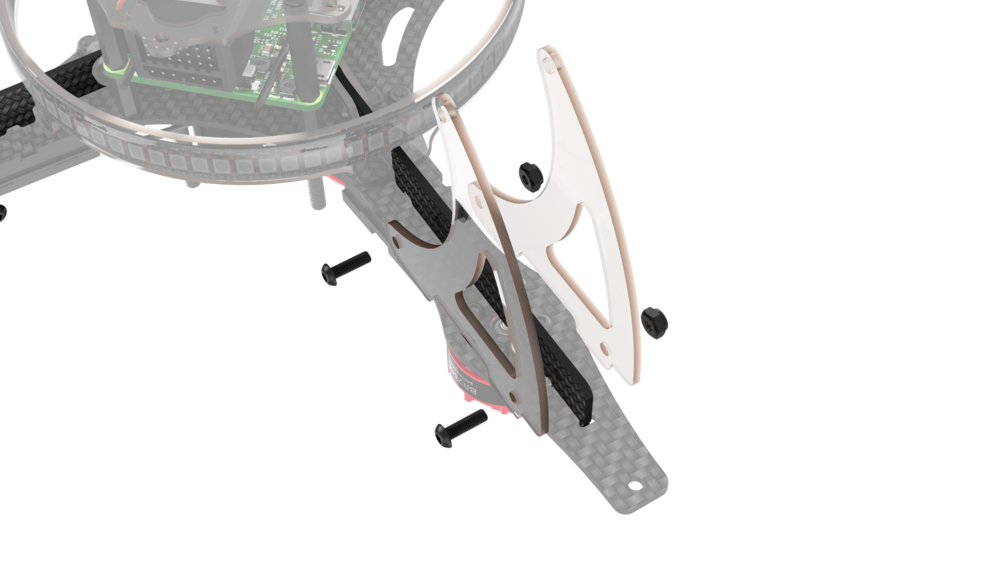
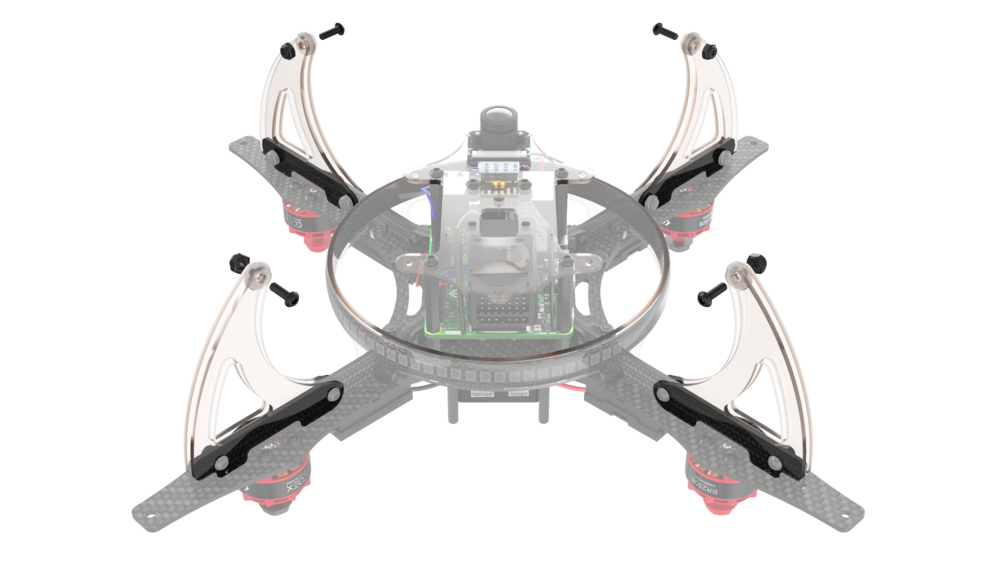
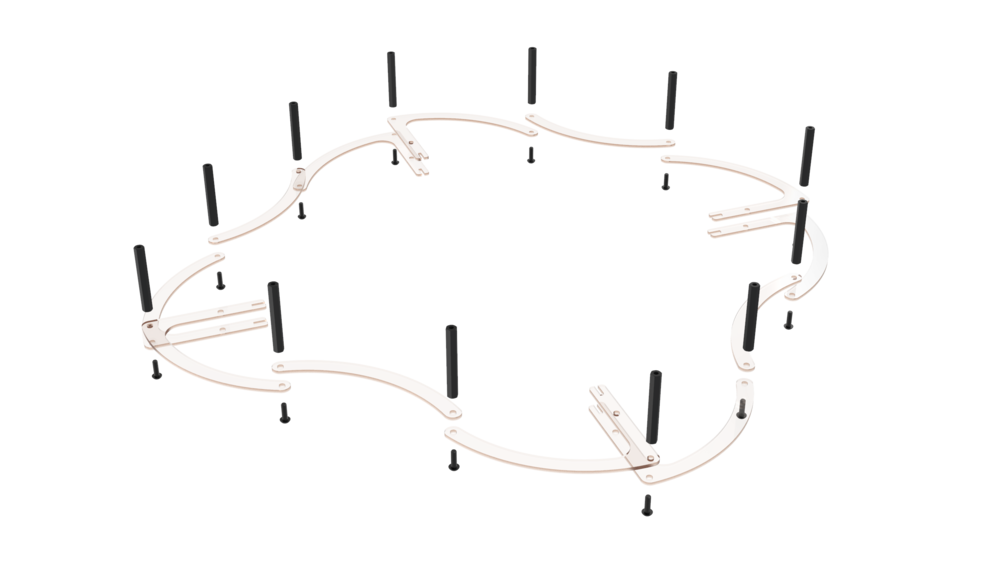
Сборка защиты винтов
-
Соберите нижнюю часть защиты, используя 12 винтов М3х10 и 12 нейлоновых стоек 40 мм.
-
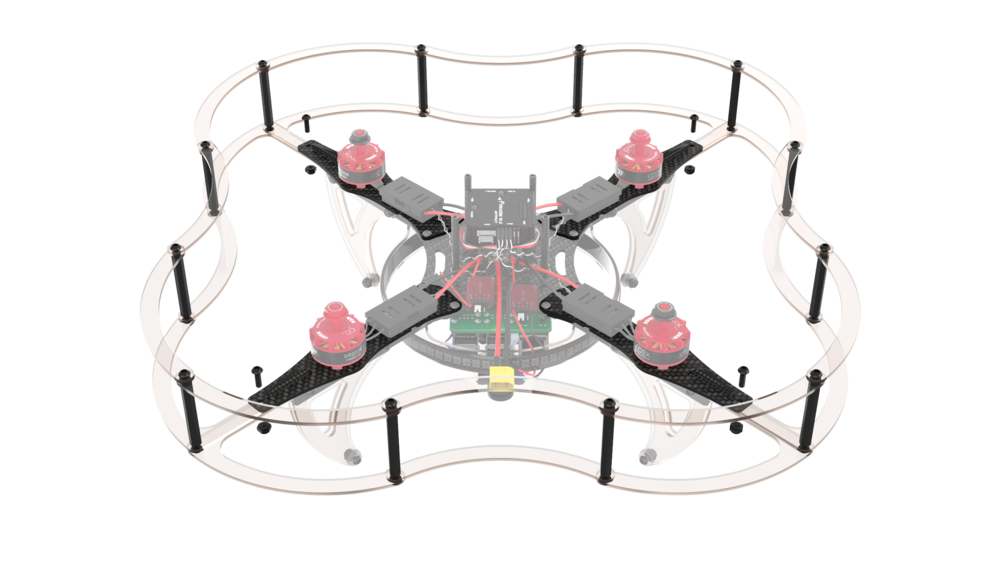
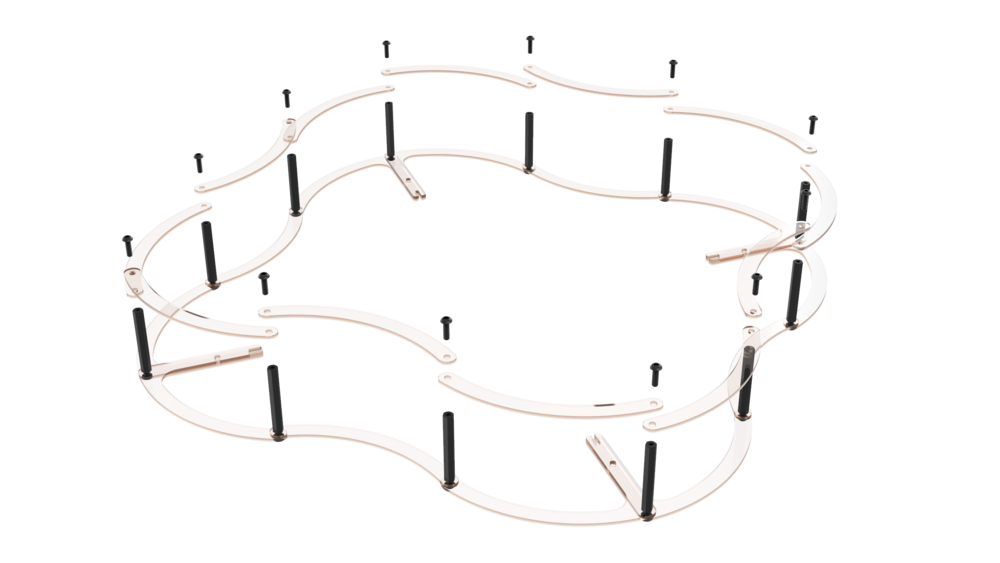
Установите верхнюю часть, используя 12 винтов М3х10.
-
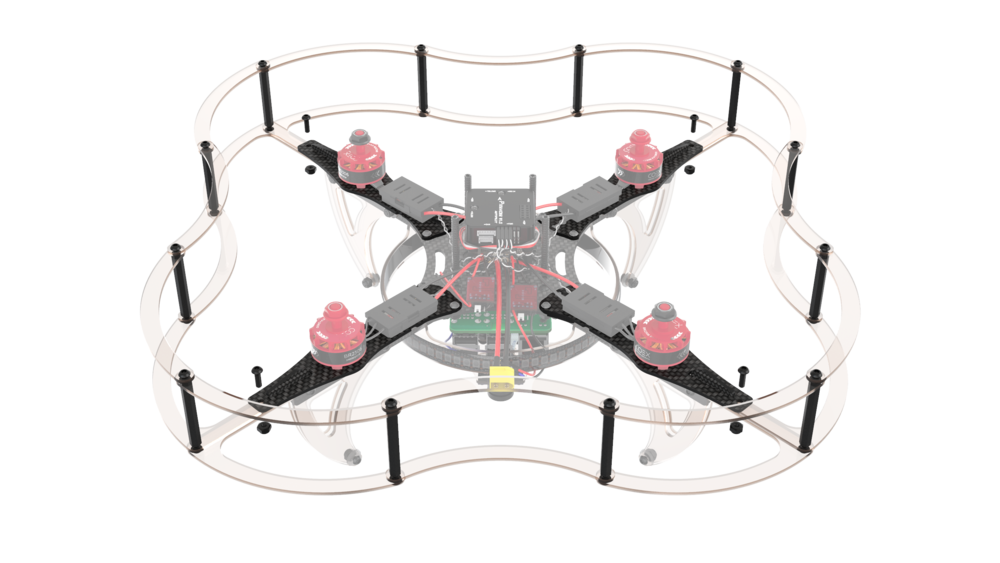
Установите защиту на коптер, с помощью 4 винтов М3х10 и стальных гаек.

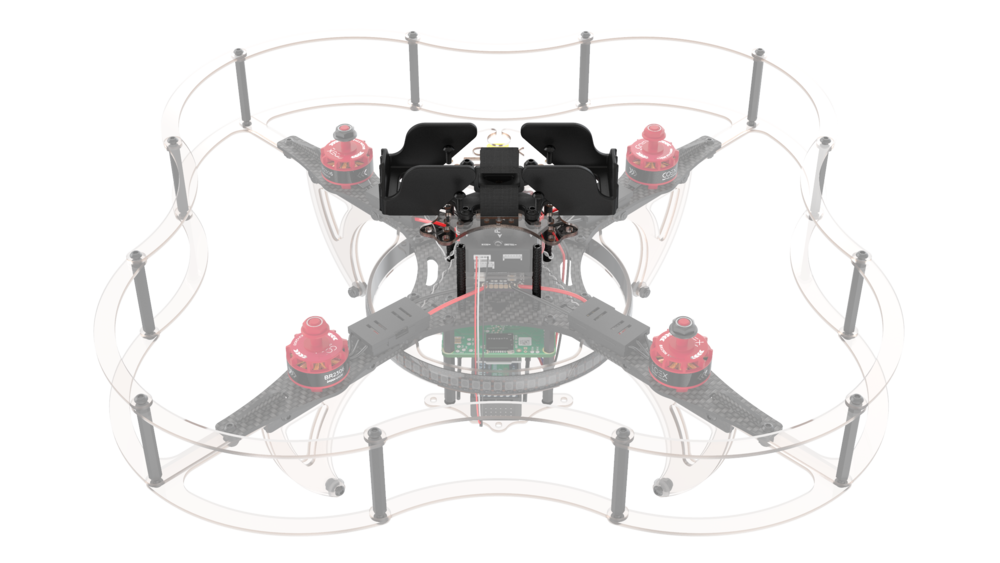
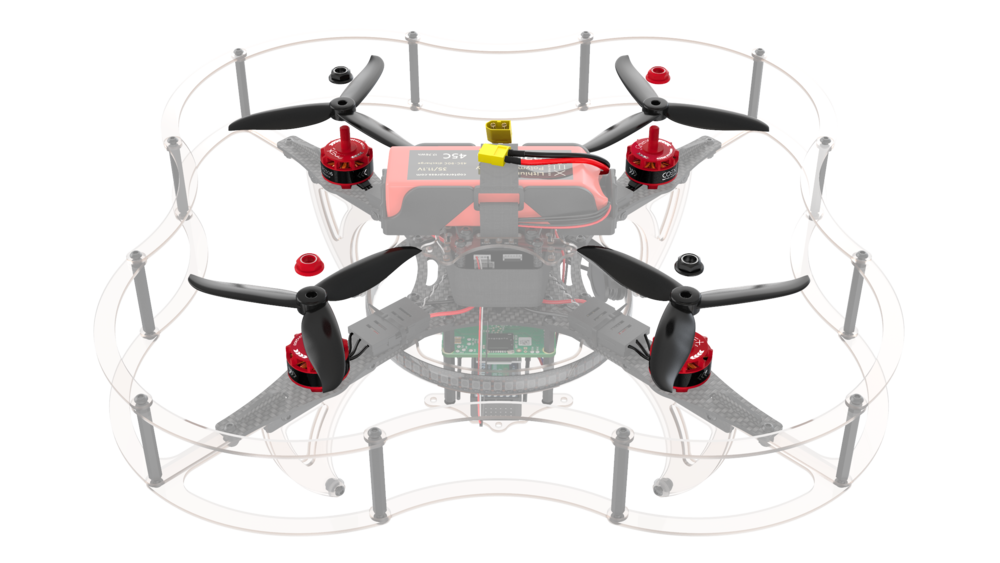
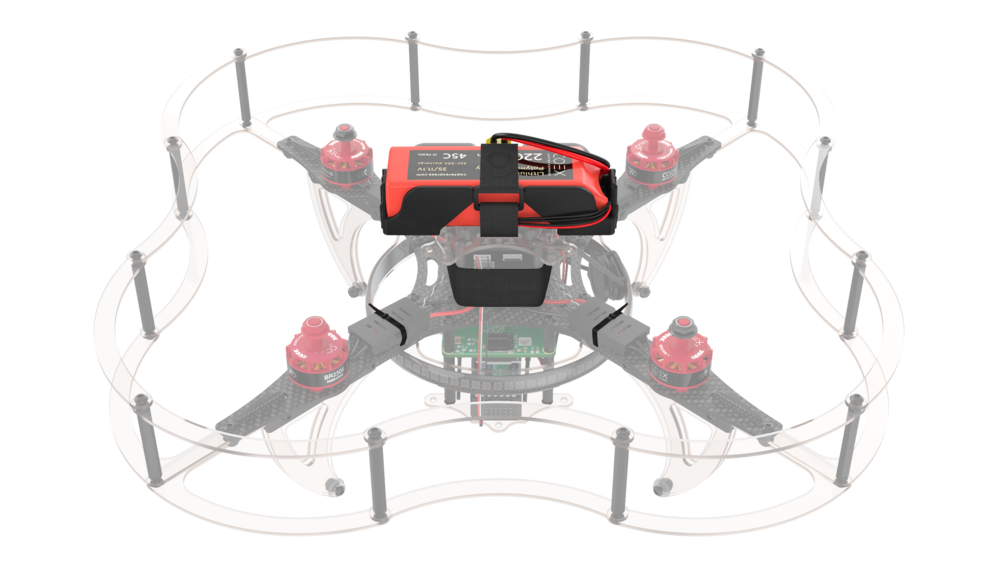
Установка верхней деки на коптер
- Установите на верхнюю деку держатель АКБ с помощью 4 винтов М3х8 и стальных гаек.
- Проденьте в пазы ремешок для фиксации АКБ.
-
Установите верхнюю деку на коптер с помощью 4 винтов М3х10.
-
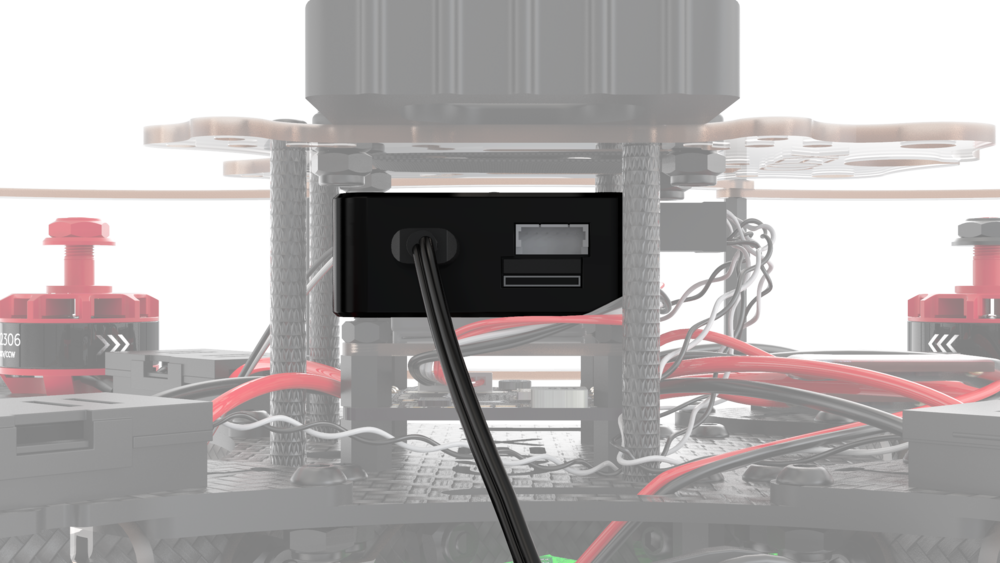
Подключите USB кабель к разъему на полетном контроллере и USB разъему Raspberry Pi.
-
Зафиксируйте «улитку» кабеля в удобном месте с помощью двухстороннего скотча так, чтобы провод не мешал вращению винтов.

Установка пропеллеров и подготовка к полёту
Произведите настройку компонентов квадрокоптера, используя раздел «Настройка».
Установка пропеллеров должна производиться только после окончательной настройки коптера, непосредственно перед полетом.
Установите 4 пропеллера, согласно схеме вращения. При установке пропеллеров АКБ должна быть отключена.
При установке будьте внимательны, чтобы пропеллер не был перевернут. На лицевой стороне пропеллера имеется маркировка его характеристик, а также направление вращения, которое должно совпадать с направлением вращения моторов.
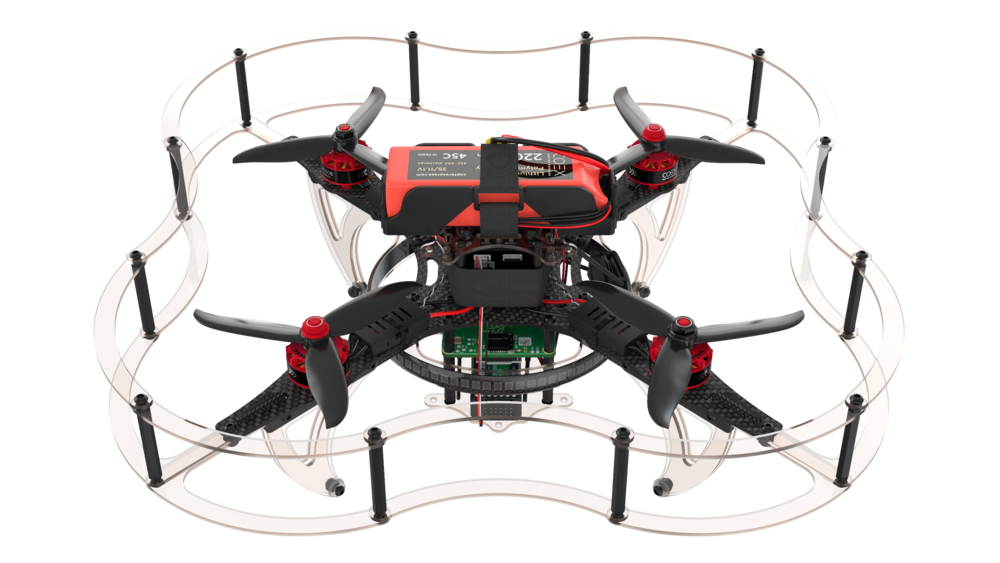
Установка АКБ
Убедитесь, чтобы все провода были спрятаны и движению пропеллеров ничего не мешает.
Проверьте сборку квадрокоптера:
- Балансировочный разъем АКБ должен быть спрятан под утягивающим ремешком.
- Регуляторы должны быть зафиксированы хомутами.
- Все провода, идущие от PDB и полетного контроллера, должны быть зафиксированы липучкой или обмотанной вокруг алюминиевых стоек.
- Пропеллеры установлены правильной стороной и соответствуют направлению кручения моторов.
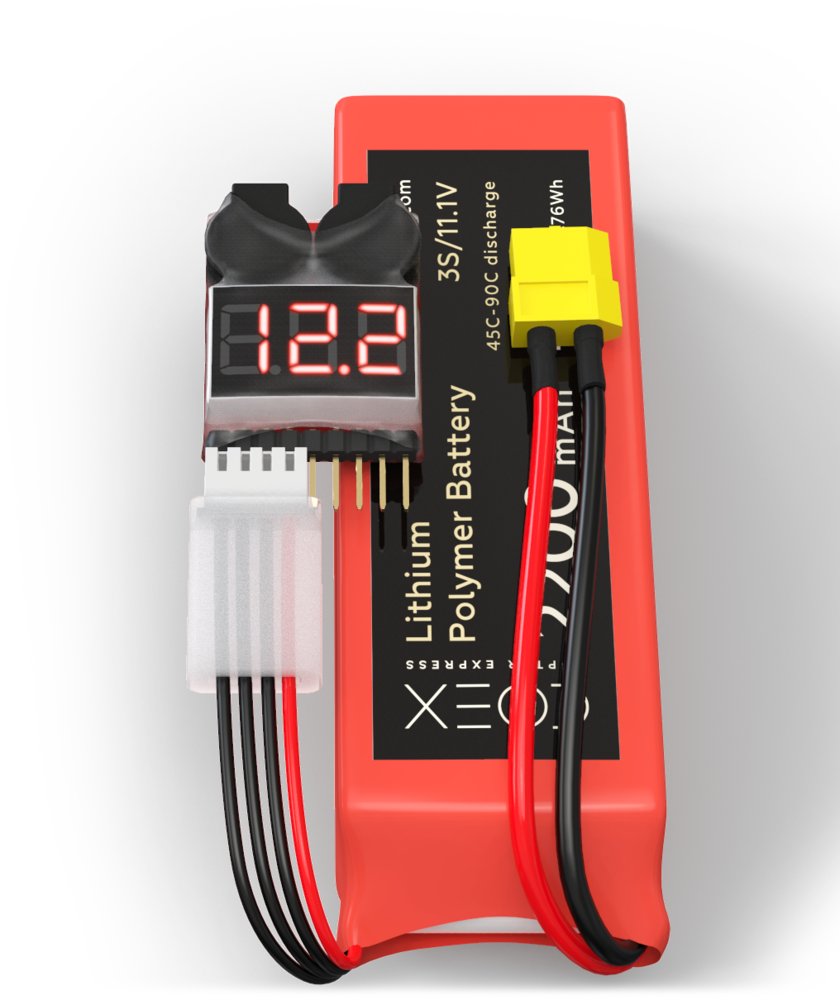
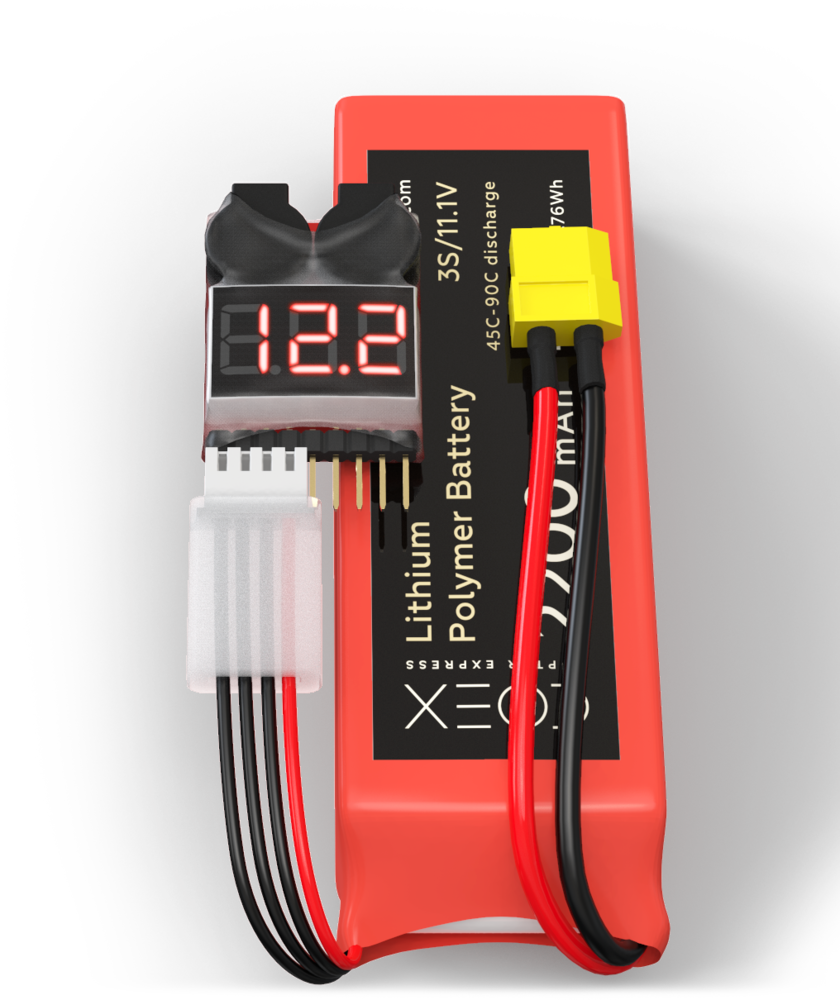
Обязательно установите и настройте индикатор напряжения перед полетом, чтобы не переразрядить аккумулятор. Для настройки индикатора используйте кнопку расположенную в его основании. Отображаемые цифры во время настройки обозначают минимально возможное напряжение в каждой ячейке аккумулятора, рекомендуемое значение 3.5.
Звуковая индикация означает, что ваш аккумулятор разряжен и его нужно зарядить.
Дрон готов к полету!
Сборка основы для рамы
СОВЕТ
Для увеличения прочности рамы вы можете распечатать на 3D принтере или нарезать на лазерном резаке рем-накладки.
-
В случае наличия, закрепите рем-накладки на пластинах жесткости, иначе продолжайте без них.
-
Совместите 2 карбоновые пластины жесткости, используя центральные пазы.
-
Используя пазы, установите сверху карбоновую центральную деку.
-
Стяните конструкцию с помощью винтов М3х8 и стальных гаек с нейлоновой вставкой, установленных в пазах пластин.
Установка моторов
-
Распакуйте моторы.
-
Используя бокорезы, укоротите провода на моторах:
- Обрежьте половину длины (оставив 30 мм).
- Зачистите (снимите 5 мм изоляции с конца провода, не повредив медные жилы).
- Скрутите медные жилы.
- Залудите провода, используя пинцет.
-
Установите мотор на луч.
-
Прикрепите мотор к лучу винтами М3х5, используя шестигранный ключ или отвёртку.

Повторите эти действия для остальных моторов.
Сборка рамы
-
Установите 4 луча с моторами на базу рамы, используя пазы, согласно схеме вращения моторов.
Hint Для правильной установки моторов обратите внимание на цвета гаек. Моторы с красными гайками следует установить на передний правый и задний левый лучи, с чёрными — на передний левый и задний правый.
-
Зафиксируйте лучи на раме, используя 8 винтов М3х8 и 6 стальных гаек, а также 2 стойки «мама-мама» 15 мм.


Подготовка платы распределения питания
- Залудите контактные площадки платы питания.
- С помощью мультиметра проверьте отсутствие короткого замыкания (прозвонить):
- Установите мультиметр в режим прозвонки.
- Проверьте работу мультиметра путем замыкания щупов между собой. При корректной работе прибор издаст характерный звук.
- Попарно один щуп прикладывается к контакту «+», а второй к «-»/GND. Если в цепи есть короткое замыкание, издается звук.
Монтаж PDB
-
Установите 4 стойки «папа-мама» 6 мм на центральную деку винтами М3х6.
-
Установите PDB на стойки.
-
Стрелки на PDB и центральной деке должны быть направлены в одну сторону.

Пайка регуляторов и ВЕС
-
Припаяйте фазные провода моторов к регуляторам.
-
Припаяйте силовые провода регуляторов к контактным площадкам платы (красный к «+», черный к «-»).
-
Припаяйте силовые провода каждого BEC к контактным площадкам одного из регуляторов (красный к «+», черный к «-»).
-
С помощью мультиметра проверьте, что в цепи нет короткого замыкания.
Перевод пульта в режим PWM
Включите пульт с помощью слайдера POWER. Если пульт заблокирован, необходимо перевести все стики в начальное положение:
-
Левый стик в центральной нижней позиции.
-
Правый стик в центре.
-
Переключатели A, B, C, D в положение «от себя».

Убедитесь, что PPM в меню RX Setup отключен:
- Убедитесь, что питание дрона выключено.
- Для входа в меню удерживайте нажатой кнопку «ОК».
- Кнопками Up/Down выбираем меню «System setup», кнопкой «ОК» подтвердите выбор.
- Выберите «RX Setup».
- Выберите «Output mode».
- Убедитесь, что в открывшемся меню выбран пункт «PWM».
- Чтобы сохранить настройки, удерживайте нажатой кнопку «Cancel».
Сопряжение приёмника и пульта
-
Выключите пульт с помощью слайдера POWER.
-
Подключите радиоприемник к разъему BEC 5В. Чёрный провод подключите к одному из нижних пинов, красный — к одному из центральных.
-
Установите джампер на вход (B/VCC).
-
Подключите АКБ.
-
Светодиод на радиоприемнике должен мигать.
-
Зажмите кнопку BIND KEY на пульте.
-
Включите пульт (перещелкните POWER, не отпуская BIND KEY).
-
Ждите синхронизации.
-
Отсоедините джампер.
-
Светодиод на приемнике должен гореть непрерывно.



Проверка направления вращения моторов
Моторы с красными гайками должны вращаться против часовой стрелки, с чёрными — по часовой стрелке. Правильные направления вращения также указаны на самих моторах. Для проверки направления вращения можно использовать сервотестер или радиоприёмник с пультом.
- Отключите АКБ и пульт.
- Подключите сигнальный провод от ESC к выходу CH3 на приёмнике. Белый провод должен подходить к верхнему пину, чёрный — к нижнему.
- Включите пульт. Левый стик должен быть в нижнем положении.
- Подключите АКБ.
- Медленно поднимайте левый стик до тех пор, пока мотор не начнёт вращаться.
Если мотор вращается в неправильную сторону, поменяйте местами два любых фазных провода.
Повторите процесс для каждого мотора.
Перевод пульта в режим PPM
Полётный контроллер не может работать с пультом в режиме PWM, поэтому следует произвести перевод пульта в режим PPM.
- Убедитесь, что питание дрона выключено.
- Для входа в меню удерживайте нажатой кнопку «ОК».
- Кнопками Up/Down выбираем меню «System setup», кнопкой «ОК» подтвердите выбор.
- Выберите «RX Setup».
- Выберите «Output mode».
- Убедитесь, что в открывшемся меню выбран пункт «PPM».
- Чтобы сохранить настройки, удерживайте нажатой кнопку «Cancel».
Установка пластины для полётного контроллера
-
Установите 4 стойки «папа-мама» 6 мм на PDB.
-
Подключите шлейф питания к PDB.
-
Установите поликарбонатную пластину на стойки и зафиксируйте нейлоновыми гайками.
Установка полётного контроллера
-
Вставьте карту microSD в полётный контроллер.
-
Установите полетный контроллер на пластину с помощью двухстороннего скотча.
-
Стрелки на полетном контроллере и центральной деке должны быть направлены в одну сторону.
-
Подключите шлейф питания PDB к разъему «POWER» полетного контроллера, закрутив его в «косичку» для взаимной фиксации проводов.
-
Установите 4 алюминиевые стойки 40 мм с помощью винтов М3х10.
-
Подключите сигнальные провода регуляторов к полетному контроллеру следующим образом:
-
Установите 2 стойки «мама-мама» 15 мм на центральную деку с помощью винтов М3х8.
-
Другие 2 стойки были установлены ранее в разделе «Сборка рамы», п. 2.




Установка обруча для светодиодной ленты
-
Согните поликарбонатную заготовку в обруч и зафиксируйте ее концы в замке.
-
Установите обруч на раму, используя пазы.

Установка Raspberry Pi
-
Вставьте карту microSD с записанным образом в Raspberry Pi
-
Установите плату Raspberry Pi на стойки, используя 4 стойки «папа-мама».
-
Протяните провода от BEC через паз в центральной раме.
-
Подключите провод питания от BEC к Raspberry, согласно схеме:
Установка светодиодной ленты на обруч
-
Проверьте наличие напаянных пинов на контактах ленты (при отсутствии — напаять).
-
Установите светодиодную ленту на обруч (используя клеевой слой на ленте) так, чтобы контакты были в задней части коптера. Для дополнительной фиксации используйте стяжки.

Подключение светодиодной ленты к Raspberry Pi
-
Питание для ленты берется от второго BEC. Подключите контакты «-» и «+» к Ground и 5v на ленте соответственно.
-
Подключите контакт D к GPIO-пину на Raspberry. Рекомендуется использовать пин GPIO21.
Установка шлейфа для камеры
- Поднимите защелку.
- Подключите шлейф.
- Закройте защелку.
Установка оборудования на нижнюю монтажную деку
-
Подготовьте лазерный дальномер к монтажу, предварительно напаяв на него контакты.
-
Установите камеру на 4 самореза 2х5.
Warning Убедитесь, что саморезы не касаются деталей на печатной плате камеры. В противном случае камера может не заработать.
-
Установить на деку лазерный дальномер с помощью 2 винтов М3х8 и стальных гаек.
-
Установите приемник на нижнюю деку с помощью двухстороннего скотча.
-
Установите нижнюю деку с помощью 4 винтов М3х10.
-
Подключите шлейф к камере.
-
Подключите лазерный дальномер к Raspberry Pi с помощью проводов типа «мама-мама»:
- Разъем VCC к пину 1 (3.3v).
- Разъем GND к пину 9 (Ground).
- Разъем SDA к пину 3 (GPIO02).
- Разъем SCL к пину 5 (GPIO03).
Монтаж ножек
-
Установите 8 ножек с помощью винтов М3х10 и стальных гаек.
-
Установите демпфирующие прокладки на ножки с помощью винтов М3х10 и стальных гаек.
Подключение кабелей
-
Подключите кабель радиоприемника в RCIN разъем полетного контроллера.
-
Подключите кабель к приемнику, соответственно изображению.


Сборка защиты винтов
-
Соберите нижнюю часть защиты, используя 12 винтов М3х10 и 12 нейлоновых стоек 40 мм.
-
Установите верхнюю часть, используя 12 винтов М3х10.
-
Установите защиту на коптер, с помощью 4 винтов М3х10 и стальных гаек.
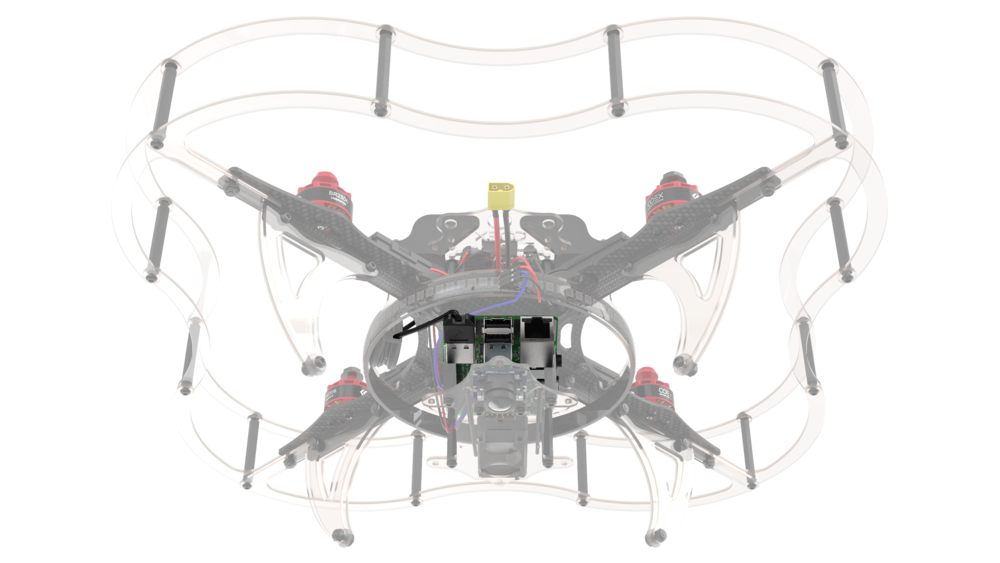
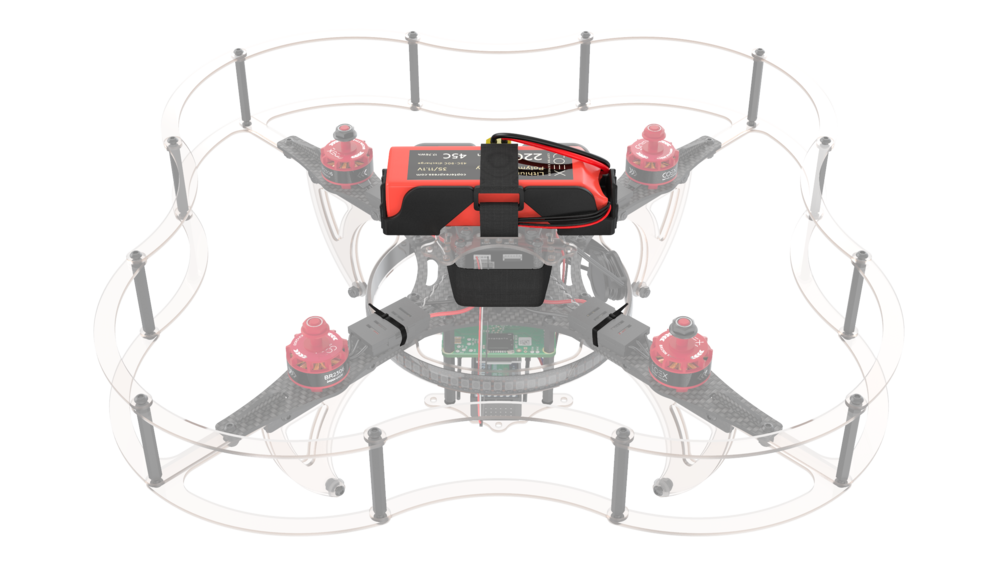
Установка верхней деки на коптер
-
Установите на верхнюю деку держатель АКБ с помощью 4 винтов М3х8 и стальных гаек.
-
Проденьте в пазы ремешок для фиксации АКБ.
-
Установите верхнюю деку на коптер с помощью 4 винтов М3х10.
-
Подключите USB кабель к разъему на полетном контроллере и USB разъему Raspberry Pi.
-
Зафиксируйте «улитку» кабеля в удобном месте с помощью двухстороннего скотча так, чтобы провод не мешал вращению винтов.

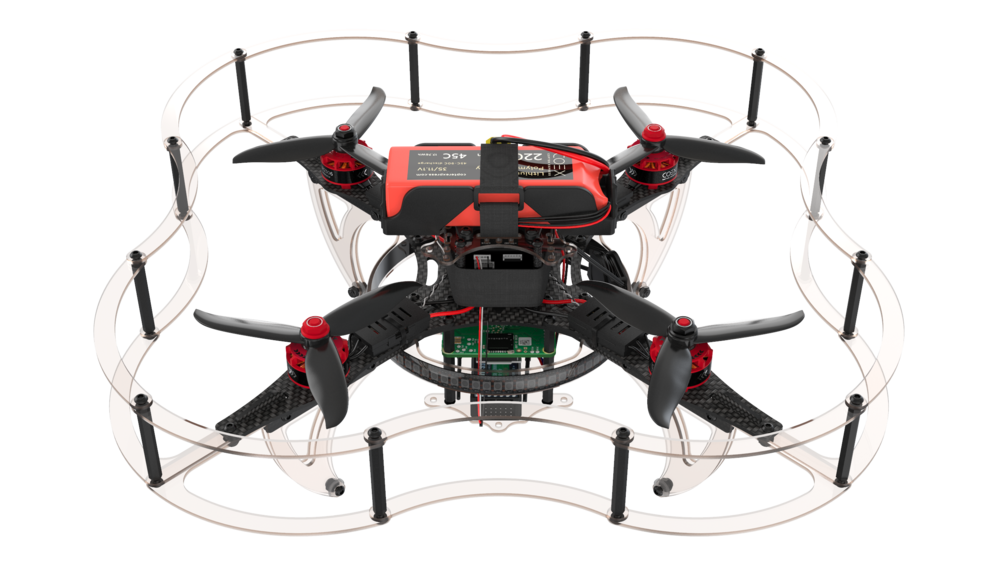
Установка пропеллеров и подготовка к полёту
Произведите настройку компонентов квадрокоптера, используя раздел «Настройка».
ВНИМАНИЕ
Установка пропеллеров должна производиться только после окончательной настройки коптера, непосредственно перед полетом.
Установите 4 пропеллера, согласно схеме вращения. При установке пропеллеров АКБ должна быть отключена.
При установке будьте внимательны, чтобы пропеллер не был перевернут. На лицевой стороне пропеллера имеется маркировка его характеристик, а также направление вращения, которое должно совпадать с направлением вращения моторов.
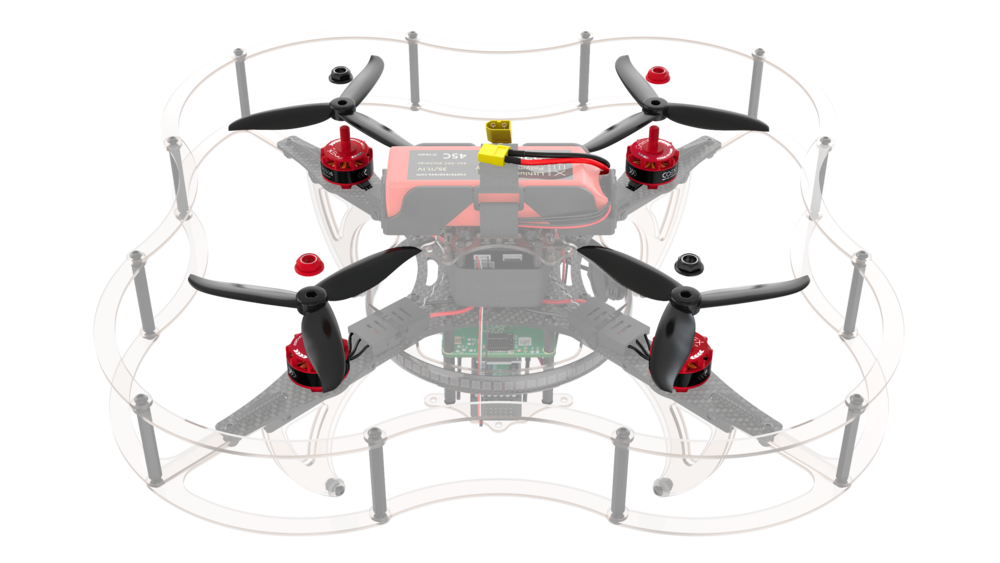
Установка АКБ
ВНИМАНИЕ
Убедитесь, чтобы все провода были спрятаны и движению пропеллеров ничего не мешает.
Проверьте сборку квадрокоптера:
- Балансировочный разъем АКБ должен быть спрятан под утягивающим ремешком.
- Регуляторы должны быть зафиксированы хомутами.
- Все провода, идущие от PDB и полетного контроллера, должны быть зафиксированы липучкой или обмотанной вокруг алюминиевых стоек.
- Пропеллеры установлены правильной стороной и соответствуют направлению кручения моторов.
Обязательно установите и настройте индикатор напряжения перед полетом, чтобы не переразрядить аккумулятор. Для настройки индикатора используйте кнопку расположенную в его основании. Отображаемые цифры во время настройки обозначают минимально возможное напряжение в каждой ячейке аккумулятора, рекомендуемое значение 3.5.
СОВЕТ
Звуковая индикация означает, что ваш аккумулятор разряжен и его нужно зарядить.
СОВЕТ
Дрон готов к полету!
Сборка Клевера 4.1
Особенность набора. Паечный набор с версией рамы 4.0, новыми регуляторами spedix e25 (они аналогичны старым dys 30a в плане работы и настройки), PDB и полётным контроллером производства COEX, радиоприёмником FS-A8S, новыми версиями пластин и деталей из поликарбоната. Использование новой COEX PDB избавляет от необходимости пользоваться дополнительными стабилизаторами на 5V, поэтому 2 платы BEC больше не включены в набор.
Особенность сборки. Сборка рамы, крепление моторов и PDB аналогичны сборке из старой версии. Отличается крепление Raspberry Pi к центральной деке. Направление вращения моторов во время сборки проверить нельзя из-за особенностей радиоприёмника, однако можно однозначно запаять провода моторов к регуляторам. Остальная сборка аналогична сборке нового беспаечного набора.

Сборка основы для рамы
Info Обратите внимание! Далее в инструкции некоторые изображения взяты из сборки старого паечного или нового беспаечного набора, если в текущей сборке требуются аналогичные действия.
-
В случае наличия, закрепите рем-накладки на пластинах жесткости, иначе продолжайте без них.
-
Совместите 2 карбоновые пластины жесткости, используя центральные пазы.
-
Используя пазы, установите сверху карбоновую центральную деку.
-
Стяните конструкцию с помощью винтов М3х8 и стальных гаек с нейлоновой вставкой, установленных в пазах пластин.





Установка моторов
-
Распакуйте моторы.
-
Используя бокорезы, укоротите провода на моторах:
- Обрежьте половину длины (оставив 30 мм).
- Зачистите (снимите 5 мм изоляции с конца провода, не повредив медные жилы).
- Скрутите медные жилы.
- Залудите провода, используя пинцет.
-
Установите мотор на луч.
-
Прикрепите мотор к лучу винтами М3х5, используя шестигранный ключ или отвёртку.


Повторите эти действия для остальных моторов.
Сборка рамы
-
Установите 4 луча с моторами на базу рамы, используя пазы, согласно схеме вращения моторов.
Hint Для правильной установки моторов обратите внимание на цвета гаек. Моторы с красными гайками следует установить на передний правый и задний левый лучи, с чёрными — на передний левый и задний правый.
-
Зафиксируйте лучи на раме, используя 8 винтов М3х8 и 8 стальных гаек.


Монтаж PDB
-
Установите 4 стойки «папа-мама» 6 мм на центральную деку винтами М3х6.
-
Установите COEX PDB на стойки. Припаяйте к площадкам GND и 5V провод для питания Raspberry Pi. Его можно сделать из 3 pin провода для телеметрии, который есть в комплекте.
-
Разъём для подключения аккумулятора должен быть направлен к задней части рамы.


Пайка регуляторов и ВЕС
-
Расположите регуляторы логотипом вверх около моторов, которые вращаются по часовой стрелке. Расположите регуляторы логотипом вниз около моторов, которые вращаются против часовой стрелки.
-
Припаяйте фазные провода моторов к регуляторам, чтобы провода не пересекались и проходили к контактам регулятора по кратчайшему расстоянию.
-
Припаяйте силовые провода регуляторов к контактным площадкам платы (красный к «+», черный к «-»).
-
С помощью мультиметра проверьте, что в цепи нет короткого замыкания.

Установка пластины для полётного контроллера COEX Pix
-
Установите 4 стойки «папа-мама» 6 мм на PDB, затем установите поликарбонатную пластину, затем закрутите её нейлоновыми гайками, затем установите резиновые стойки 6мм.
-
Закрепите COEX Pix на резиновых стойках с помощью нейлоновых гаек.


Подключение полетного контроллера
-
Подключите регуляторы оборотов к полетному контроллеру в соответствии со схемой.
-
Подключите кабель питания к плате распределения питания и соответствующему разъему на полетном контроллере.
-
Установите алюминиевые стойки 40мм на болты М3х12.




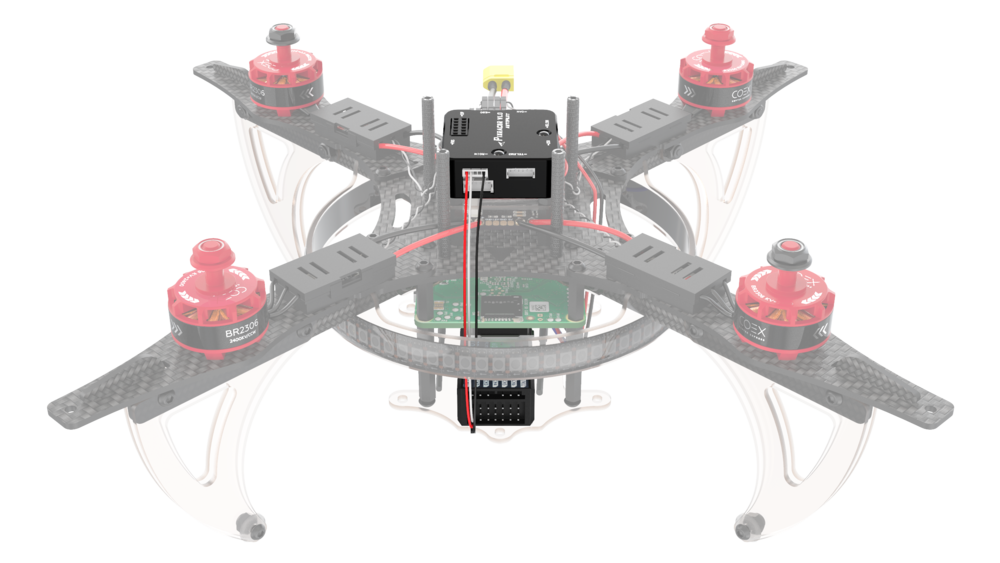
Установка Raspberry Pi, камеры, дальномера и радиоприёмника
-
На нижнюю грань основной деки установите 4 стойки 15мм, закрепите их с помощью болтов М3х8.
-
На монтажную деку установите 4 стойки 6мм и 4 стойки 30мм, закрепите их с помощью болтов М3х6 и М3х12.
-
Установите собранную монтажную деку на основную и закрепите с помощью болтов М3х8.
-
Установите плату Raspberry Pi и зафиксируйте с помощью нейлоновых гаек.
-
На деку захвата установите дальномер с помощью самоконтрящихся гаек и болтов М3х8, и приклейте радиоприемник
FS-A8Sс помощью двустороннего скотча. Подключение приёмника к полётному контроллеру и его сопряжение с пультом описано статье Работа с приёмником Flysky FS-A8S.
-
Установите 4 стойки 20мм и закрепите их с помощью болтов М3х8.
-
На малую монтажную деку установите камеру и зафиксируйте ее с помощью 2ух маленьких саморезов, в верхнем левом и нижнем правом углах.
-
Установите модуль камеры на деку захвата и закрепите с помощью болтов М3х8.
-
Установите собранную деку захвата и зафиксируйте с помощью болтов М3х8.
-
Подключите к Raspberry Pi дальномер и кабель питания.
-
Подключите шлейф камеры к Raspberry Pi.











Установка LED ленты
-
Соберите обруч для светодиодной ленты, объединив замок на концах.
-
Наклейте светодиодную ленту на обруч, для большей прочности притяните ее с помощью 3-4 хомутов. Припаяйте к ленте 2 силовых провода и один сигнальный провод для подключения к Raspberry Pi.
-
Установите обруч на раму. Припаяйте питание светодиодной ленты (красный, черный кабели) к свободным площадкам 5V и GND соответственно на COEX PDB. Подключите сигнальный выход светодиодной ленты(белый кабель) в Raspberry Ri, к пину GPIO 21.



Монтаж ножек
-
Установите 8 ножек с помощью винтов М3х10 и стальных гаек.
-
Установите демпфирующие прокладки на ножки с помощью винтов М3х10 и стальных гаек.



Установка защиты
-
Соберите нижнюю часть защиты, используя 12 винтов М3х10 и 12 нейлоновых стоек 40 мм.
-
Установите верхнюю часть, используя 12 винтов М3х10.
-
Установите монтажную деку и закрепите ее болтами М3х8.
-
Установите защиту на коптер, с помощью 4 винтов М3х10 и стальных гаек.




Установка пропеллеров и подготовка к полёту
-
Подключите полётный контроллер по micro USB проводу к Raspberry Pi. Закрепите улитку с проводом таким образом, чтобы она находилась ниже уровня установки пропеллеров, чтобы пропеллеры не повредили провод во время полёта. Для крепления улитки можно воспользоваться стяжкой.
-
Произведите настройку компонентов квадрокоптера, используя раздел «Настройка».
Warning Установка пропеллеров должна производиться только после окончательной настройки коптера, непосредственно перед полетом.
-
Установите 4 пропеллера, согласно схеме вращения. При установке пропеллеров АКБ должна быть отключена.
При установке будьте внимательны, чтобы пропеллер не был перевернут. На лицевой стороне пропеллера имеется маркировка его характеристик, а также направление вращения, которое должно совпадать с направлением вращения моторов.



Установка АКБ
Warning Убедитесь, что все провода спрятаны и движению пропеллеров ничего не мешает.
Проверьте сборку квадрокоптера:
- Балансировочный разъем АКБ должен быть спрятан под утягивающим ремешком.
- Регуляторы должны быть зафиксированы хомутами.
- Все провода, идущие от PDB и полетного контроллера, должны быть зафиксированы липучкой или обмотаны вокруг алюминиевых стоек.
- Пропеллеры установлены правильной стороной и соответствуют направлению вращения моторов.
Обязательно установите и настройте индикатор напряжения перед полетом, чтобы не переразрядить аккумулятор. Для настройки индикатора используйте кнопку, расположенную в его основании. Отображаемые цифры во время настройки обозначают минимально возможное напряжение в каждой ячейке аккумулятора, рекомендуемое значение 3.5.
Info Звуковая индикация означает, что ваш аккумулятор разряжен и его нужно зарядить.

Success Дрон готов к полету!
Сборка Клевера 3
В данной инструкции рассматривается сборка комплекта COEX Clover 3 с платой регуляторов 4в1.

Caution Перед использованием паяльного оборудования обязательно ознакомьтесь с техникой безопасности при пайке.
Дополнительное оборудование

Условные обозначения

Установка моторов
-
Распаковать моторы.
-
Закрепить мотор на луче шестигранными винтами М3х6 (самые короткие винты в комплекте с моторами).
Шестигранный ключ в комплекте.
-
Вставить гайки М3 (4 шт) в пластиковый держатель.
Для удобства можно использовать длинный винт, либо плоскогубцы
-
Закрепить луч, нижнюю защиту луча и держатель винтами М3х12, используя крестовую отвертку.
-
Скрепить хомутом луч и нижнюю защиту луча.
Хвост от хомута (стяжки) отрезать ножницами.


Монтаж каркасных элементов
- Установить пластиковые гайки М3 (4 шт) для крепления PDB на раму винтами М3х8.
- Установить стойки 6 мм (4 шт) для крепления Raspberry Pi на раму винтами М3х8.
- Установить на раму собранную конструкцию, соблюдая схему, винтами М3х16.
- Установить каркас для светодиодной ленты, используя прорези в держателях для ножек.

Монтаж преобразователя напряжения BEC (припаять и проверить)
-
Распаковать плату питания и установить шлейф питания.
-
Включить мультиметр в режим измерения постоянного напряжения (диапазон 20В или 200В).
-
Проверить работоспособность платы питания, подключив АКБ
- Выходное напряжение на разъеме XT30 должно равняться напряжению на АКБ (от 10В до 12.6В).
- Выходное напряжение на шлейфе питания должно быть в пределах 4.9В до 5.3В.
- Измеряем между черным и красным проводами.
-
Распаковывать преобразователь напряжения и снимаем прозрачную изоляцию.
-
Припаять два дополнительных провода на BEC
-
Взять из набора 3 провода папа-мама (красный, черный и любого цвета)
-
Красный и черный залудить с обеих сторон, используя пинцет. На синем проводе залудить со стороны коннектора ПАПА.
Залудить — это:
- Нанести флюс на оголенную часть провода.
- Покрыть припоем.
-
Припаять красный и черный провода к BEC:
ЧЕРНЫЙ -> OUT- КРАСНЫЙ -> OUT+
-
-
Проверить работу BEC.
-
Припаять BEC на плату питания:
-
Подключить АКБ и проверяем напряжение на припаянных проводах к BEC (из пункта 5).
5В — все правильно!
больше 10В — отключите питание и переставьте желтую перемычку на другой пинцет.
0В — плохо спаяли.
-
Если BEC выдает 5В, то изолируем паячное соединение черной термоусадкой.
-
-
Монтаж светодиодной ленты.
-
Припаять провода от BEC (из пункта 5) к светодиодной ленте.
-
Удалить силиконовый слой на ленте (надрезать ножом и оторвать).
-
Залудить контакты светодиодной ленты.
Красный -> +5V Черный -> GND Синий -> Din
-

Монтаж регуляторов
Монтаж 4 отдельных регуляторов
Залудить три контактные площадки регулятора
- Нанести флюс
- Нанести припой
Чтобы припой аккуратно заполнил всю площадку, необходимо прогреть площадку регулятора. Для этого нужно удерживать жало паяльника на контактной площадке в течение 2 сек (или больше, если потребуется)

- Повторить данную операцию для оставшихся трех регуляторов
Припаять провода моторов к регуляторам
Припаять ранее приготовленные провода моторов к контактным площадкам регуляторов.

- Повторить данную операцию для оставшихся трех регуляторов
Монтаж платы регуляторов 4в1 и платы питания PDB
-
Установить плату регуляторов 4в1, как показано на картинке.
Соединить фазные провода моторов с проводами регуляторов.
-
Закрепить плату регуляторов стойками 6 мм (4 шт.).
На стойки накрутить пластиковые гайки М3 (4 шт.).
-
Установить плату распределения питания PDB, как показано на картинке (разъем XT60 направлен к хвосту коптера).
-
Соединить разъемы питания платы питания и платы регуляторов XT30.

Сопряжение приемника и пульта
-
Подключить провод 5В от BEC в разъем приемника.
Установить BIND разъем в крайний правый порт B/VCC.
-
Подключить АКБ. Индикатор на приемники должен быстро мигать (режим сброса).
-
Зажать и удерживать кнопку BIND на пульте и включаем пульт.
На пульте отображается процесс сопряжения RXBinding
-
После установки сопряжения (появление допю строк на дисплее пульта):
- Убрать BIND разъем из приемника.
- Отключить АКБ.

Hint Если пульт не включается или заблокирован, см.
статью неисправности пульта.
Проверка направления вращения моторов
-
Включить пульт.
Убедиться, что PPM в меню RX Setup отключен (раздел «Нет связи с полетным контроллером»)
В пункте 3 выберите “RX setup” > “PPM OUTPUT” > “Off”.
Сохраните изменения (удерживаем нажатой кнопку “CANCEL”).
-
Подключить оранжевый провод S1 от платы регуляторов в CH3 на приемнике. Подключить внешнее питание.
-
Подать левым стиком газ (throttle) на 10%.
-
Проверить направления вращения мотора по схеме.Повторить для каждого мотора. Таким образом, будет понятно каким именно мотором мы управляем.
-
Если необходимо изменить направление вращения, то меняем любые два фазных провода мотора (нужно переподключить).

Монтаж и подключение полетного контроллера Pixracer
-
Установить Полетный контроллер Pixracer на двухстороний скотч 3М (2-3 слоя).
Также полетный контроллер можно извлечь из корпуса и жестко установить на стойке М3х6. -
Установить стойки 40 мм, используя винты М3х8.
Подключить разъем POWER.
-
Подключить регуляторы, как на картинке.
Подробно про подключение регуляторов 4в1.
-
Подключить шлейф радиоприемника в разъем RCIN в Pixracer.

Монтаж Raspberry
-
Перевернуть коптер.
Установить Raspberry на стойки, используя монтажные отверстия Raspberry.
USB-разъемы направлены к хвостовой части коптера.
-
Установка шлейфа для камеры:
- поднять защелку;
- подключить шлейф;
- закрыть защелку.
-
Подключение питания Raspberry:
5В -> pin 04 (DC power 5v) GND -> pin 06 (Ground) Подключение светодиодной ленты pin 40 (GPIO21) -
Сборка маунта для камеры RPi.
Используйте винт М3х16 и гайку М3

Монтаж Arduino и радиоприемника FlySky
-
Произвести монтаж пинов микроконтроллера Arduino Nano, используя пайку.
-
Установить миконтроллер в специальной маунт и прикрепите к нижней деке, используя винты М3х16 (4 шт.).
-
Используя 2хсторонний скотч, прикрепить приемник, как показано на рисунке.
-
Подключить шлейф радиоприемника от Pixracer как на рисунке.
белый -> PPM красный -> 5V черный -> GND оранжевый, зеленый -> не используются. Выньте эти провода из разъёма или обрежьте их.

Монтаж камеры RPi
-
Установить маунт для камеры RPi в сборе на нижнюю деку винтами М3х12 (2 шт.).
-
Подключить шлейф к камере RPi.
-
Установить камеру в маунт, закрепить саморезами М2.
-
Закрепить Raspberry стойками 30 мм (4 шт.).
Установить нижнюю деку в сборе на стойки винтами М3х8 (4шт.)
-
Установить ножки в маунты (4 шт.).

Монтаж остальных конструктивных элементов
-
Установить нижней защиты, используя винты М3х12 (8 шт.) и стойки 30 мм (8 шт.).
-
Установить верхней защиты, используя винты М3х12 (8 шт.).
-
Установить ремешок в верхнюю деку для фиксации АКБ.
Закрепить верхнюю деку винтами М3х8 (4 шт.)

Монтаж USB соединителей
- Соедините Pixracer и Raspberry, используя micro USB — USB кабель.
- Соедините Arduino и Raspberry, используя micro USB — USB кабель.
 .
.
Подробнее про подключение см. статью.
90 850 руб.
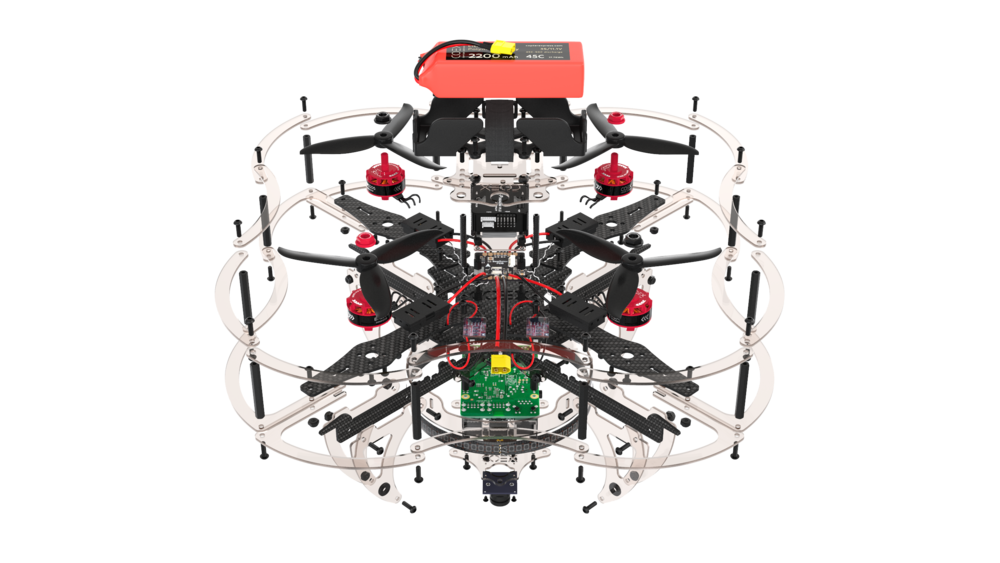
Карбоновая рама, защита опор, мощные бесколлекторные двигатели, полетник PX4, Raspberry Pi 4, программируемая светодиодная полоса, камера машинного зрения, лазерный дальномер, навигация в помещении, аккумулутяор с увеличенной емкостью.
Данный конструктор был разработан для учеников старших классов и студентов университетов, а также для всех, кто занимается исследовательскими проектами, участвует в соревнованиях, олимпиадах и хакатонах.
1.1. Полетный контроллер Pixracer: наличие
1.1.1. Технические характеристики:
1.1.2. Габаритные размеры платы 36 мм на 36 мм
1.1.3. Тактовая частота процессора 168 МГц
1.1.4. Наличие вывода питания +5В на серворазъемах 2 шт
1.1.5. Наличие ЭМИ-фильтров емкостью 2.2 мкф по питанию 7 шт
1.1.6. Возможность установки прошивки PX4 наличие
1.1.7. Поддержка интерфейсов UART, I2C, CAN наличие
1.1.8. Возможность стабилизации в разных полетных режимах по угловой скорости, ориентации, позиции. Наличие
1.2. Плата распределения питания, PDB BeeRotor наличие
1.2.1. Технические характеристики:
1.2.2. Преобразователь напряжения на 5 вольт наличие
1.2.3. Количество контактных площадок 12 шт
1.2.4. Датчик напряжения с поддержкой интерфейса UART наличие
1.3. Регулятор оборотов ESC DYS 30a: наличие
1.3.1. Технические характеристики:
1.3.2. Максимальный рабочий ток 30 ампер
1.3.3. Максимальное напряжение 25,2 Вольта
1.4. Бесколлекторный электродвигатель, COEX BR2306, 2400 kV наличие
1.4.1. Технические характеристики:
1.4.2. Диаметр статора 23 мм
1.4.3. Высота статора 6 мм
1.4.4. Мощность двигателя 450 ватт
1.5. Пропеллер пластиковый 5040×4 (пара) наличие
1.5.1. Технические характеристики:
1.5.2. Диаметр пропеллера 125 мм
1.6. BEC (источник питания) 5V 12V , 3A наличие.
1.6.1. Технические характеристики:
1.6.2. Максимальный ток 3 ампер
1.7. Литиевая аккумуляторная батарея, 3S LiPo 2200 mAh наличие
1.7.1. Технические характеристики:
1.7.2. Емкость батареи 2200 мАч
1.7.3. Напряжение батареи 11,1 вольт
1.8. Индикатор уровня заряда батареи (пищалка) наличие
Технические характеристики:
1.8.2. Диапазон измеряемого напряжения от 7,4 до 29,6 вольт
1.9. Зарядное устройство B3 наличие
1.9.1 Технические характеристики:
1.9.2. Выходная мощность 10 Ватт
1.9.3. Максимальное напряжение заряда 12,6 Вольт
1.9.4. Разъем для зарядки JST-XH 4 pin наличие
1.10. Одноплатный микрокомпьютер Raspberry Pi3 Model B+ наличие
1.10.1. Технические характеристики:
1.10.2. Тактовая частота процессора 1,2 ГГц
1.10.3. Количество ядер 4 ядра
1.10.4. Возможность подключения камеры по CSI порту наличие
1.10.5. Оперативная память 1 Гб
1.10.6. USB порты 4 шт
1.10.7. Возможность подключения по bluetooth наличие
1.11. Камера для однопалатного компьютера, Raspberry Pi 3 Camera (G) наличие
1.11.1 Технические характеристики:
1.11.2. Угол обзора камеры 140 градусов
1.11.3 Разрешение камеры 5 Мп
1.12. Лазерный дальномер CJMCU-531 наличие
1.12.1. Технические характеристики:
1.12.2. Дальность измерения расстояния 400 см
1.12.3. Возможность подключения по интерфейсу i2c наличие
1.13. Модуль памяти, MicroSD 16 GB 10 Class с установленным ПО для одноплатного компьютера
наличие
1.13.1 Характеристики ПО для одноплатного компьютера:
1.13.2. Возможность управления полётным контроллером по протоколу MAVLink наличие
1.13.3. Возможность получение полных показаний телеметрии от полётного контроллера на бортовой компьютер наличие
1.13.4. Возможность формирования миссии на бортовом компьютере и передача на полётный контроллер наличие
1.13.5. Число распознаваемых одновременно ArUco-маркеров системой технического зрения 36 шт.
1.13.6. Функция зависания над ArUco-маркером Наличие
1.13.7. Максимальное отклонение при зависании над ArUco-маркером 2 см.
1.13.8. Фреймрейт распознавания ArUco-маркеров 60 кадров/сек кадров/сек
1.13.9. Возможность трансляции HD-видео на мобильное приложение с задержкой 100 МС
1.13.10. Программная среда обеспечивает поддержку получения и детерминирования сигналов с контроллера БВС вместо исполнительных механизмов наличие
1.13.11. Количество доступных показателей телеметрии 30 шт
1.13.12. Возможность соединения с наземной управляющей станцией QGroundControl по Wi-Fi наличие
1.13.13 Возможность беспроводной калибровки датчиков наличие
1.13.14. Возможность строить графики по параметрам телеметрии наличие
1.13.15. 3D-визулизация позиции, ориентации и скорости коптера на внешнем компьютере наличие
1.13.16. Возможность программирования автономного полета квадрокоптера на языке программирования Phyton наличие
1.14. Плата микроконтроллера, Arduino Nano наличие
1.14.1. Технические характеристики:
1.14.2. Флэш-память 16Кб
1.14.3. Тип процессора ATMega 168 наличие
1.14.4. Тактовая частота 16 МГц
1.15. Светодиодная лента адресная, 144 led/m 5V IP65, в метрах (Black) наличие
1.15.1. Технические характеристики:
1.15.2. Количество светодиодов на метр 144 шт
1.15.3 Класс пылевлагозащиты IP55
1.15.4. Длина 40 см
1.16. Кабель Micro-USB (улитка) наличие
1.16.1. Технические характеристики:
1.16.2. Длина 60 см
1.17. Макетная плата, паячная наличие
1.17.1. Технические характеристики:
1.17.2. Количество контактов 270 шт
1.18. Беспаечная макетная плата наличие
1.18.1. Технические характеристики:
1.18.2. Количество контактов 170 точек
1.19. Набор резисторов наличие
1.20. Провод медный многожильный с силиконовой изоляцией, 14 AWG красный+черный наличие
1.20.1. Технические характеристики:
1.20.2. Калибр провода 14 AWG
1.20.3. Длина 20 см
1.21. Термоусадка 5мм (черная+красная) наличие
1.21.1. Технические характеристики:
1.21.2. Термоусадка тип 1
1.21.3. Диаметр 15 мм
1.21.4 Коэффициент усадки 2
1.21.5. Термоусадка тип 2
1.21.6. Диматер 5 мм
1.21.7. Коэффициент усадки 2
1.22. Разъёмы силовые, XT60 plug мама наличие
1.22.1. Технические характеристики:
1.22.2. Максимальная токопроводимость 60 ампер
1.23. Комплект аппаратуры Flysky i6x (10 каналов) с приемником наличие
1.23.1. Технические характеристики:
1.23.2. Количество каналов управления 8 шт
1.23.3. Приемник сигнала наличие
1.23.4 Рабочая частота 2,4 ГГц
1.23.5. Протоколы передачи данных PPM, S-bus, I-bus наличие
1.24. Кабель для симулятора наличие
1.24.1. Технические характеристики:
1.24.2. Совместимость с комплектом радиоаппаратуры управления наличие
1.24.3. Возможность подключения к компьютеру по интерфейсу USB наличие
1.25. Соединительный кабель для телеметрии и полетных контроллеров наличие
1.25.1. Технические характеристики:
1.25.2. Количество пин-соединений для подключения 3 соединения на концах кабеля
1.25.3. Длина 15 см
1.26. Комплект соединительных проводов для Arduino и макетных плат мама-мама наличие
1.26.1. Технические характеристики:
1.26.2. Длина 20 см
1.26.3. Тип соединения мама-папа, папа-папа, папа-мама наличие
1.26.4. Количество проводов каждого типа 10 шт
1.27. Рама квадрокоптера наличие
1.27.1. Технические характеристики:
1.27.2. Материал рамы карбон
1.27.3. Количество составных частей 7 шт
1.27.4. Расстояние между центрами моторов 235 мм
1.27.5. Габаритные размеры рамы квадрокоптера в собранном виде 251×251мм
1.28. Защита пропеллеров совместимая с рамой квадрокоптера наличие
1.28.1. Технические характеристики:
1.28.2. Материал защиты пропеллеров поликарбонат
1.28.3. Количество составных частей 24 шт
1.28.4. Габаритные размеры собранной защиты 365х365 мм
1.29. Комплект крепежа необходимый для сборки квадрокоптера наличие
1.29.1. Технические характеристики:
1.29.2. Саморез 2х5 черный 8 шт
1.29.3. Винт М3х6 ISO 7380 10.9 черный 10 шт
1.29.4. Винт М3х8 ISO 7380 10.9 черный 45 шт
1.29.5. Винт М3х10 ISO 7380 10.9 черный 65 шт
1.29.6. Гайки стальная c нейлоновой вставкой М3 DIN985 50 шт
1.29.7. Гайка нейлоновая М3 (черная) 20 шт
1.29.8. Стойки нейлоновая HTS-306 (черная) 15 шт
1.29.9. Стойки нейлоновая HTS-320 (черная) 5 шт
1.29.10. Стойки нейлоновая HTP-315 (черная) 10 шт
1.29.11. Стойки нейлоновая HTP-330 (черная) 15 шт
1.29.12. Стойки нейлоновая HTP-340 (черная) 20 шт
1.29.13. Стойка демпферная М3х6 5 шт
1.29.14. Стойка аллюминиевая L-30мм (черная) 5 шт
1.29.15. Стойка аллюминиевая L-40мм (черная) 5 шт
1.29.16. Резиновые проставки для ног (шайбы) 10 шт
1.29.17. Клейкая лента двусторонняя, 3М (квадрат) 10 шт
1.29.18. Ремешок для батареи, 150 мм 2 шт
1.29.19. Велкро-липучка 10см
1.29.20. Крепеж, стяжка кабелная пластиковая неразъемная 2,5х120мм (черная) 25 шт
1.30. Комплект ручного инструмента наличие
1.30.1. Технические характеристики:
1.30.2. Отвертка под шестигранник 2мм 1 шт
1.30.3. Ключ шестигранный 2мм 1 шт
1.30.4. Отвертка торцевая 5.5мм (под м3) 1 шт
1.30.5. Отвертка PH1 (мал) 1 шт
1.30.6. Бокорезы (мал) 1 шт
1.30.7. Ключ для пропеллеров 1 шт
1.31. USB-флешка COEX с методическими материалами наличие
1.31.1. Технические характеристики:
1.31.2. Учебные планы на 72 и 144 часа наличие
1.31.3. Методические материалы на 72 и 144 наличие
1.31.4. Учебные видеокурсы по сборке, настройке и программированию от производителя в электронном виде на сайте наличие
1.32. Комплект ArUco маркеров 6шт
1.32.1. Технические характеристики:
1.32.2. Размер 210х210 мм
Процесс сборки квадрокоптера