Интеллектуальный блок КИМ2
Главная ![]() Продукция и услуги
Продукция и услуги ![]() Системы управления электроприводами
Системы управления электроприводами ![]() Интеллектуальный блок КИМ2
Интеллектуальный блок КИМ2
Интеллектуальный блок КИМ2 обеспечивает базовый набор функций для управления электроприводом и арматурой, контроля их работы, настройки необходимых параметров. Интеллектуальный блок КИМ2 создает в энергонезависимой памяти детализированные отчетные данные о работе электропривода и арматуры. Архив статистических данных может быть сохранены в виде текстового файла в программе «Конфигуратор».
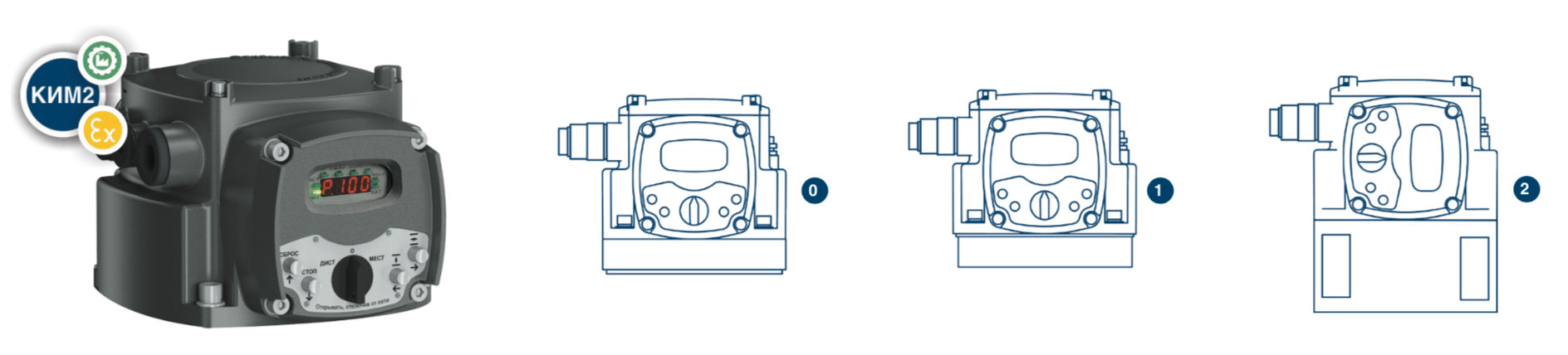
Интеллектуальный блок КИМ2 устанавливается непосредственно на электроприводе. Панель местного управления КИМ2, а также корпус КИМ2 в зависимости от пространственного расположения электропривода с арматурой на объекте могут быть повернуты в необходимое удобное положение (конструктивные исполнения 0, 1 и 2).

Состав панели местного управления (ПМУ) КИМ2
- Цифровой индикатор положения и момента, кодов неиправностей, параметров настройки
- Светодиодная индикация для отображения направления движения, конечных положений, превышения момента, неисправности, необходимости замены батареи
- Переключатель режимов управления (селектор)
- Кнопки управления и настройки
- Замок для механической блокировки
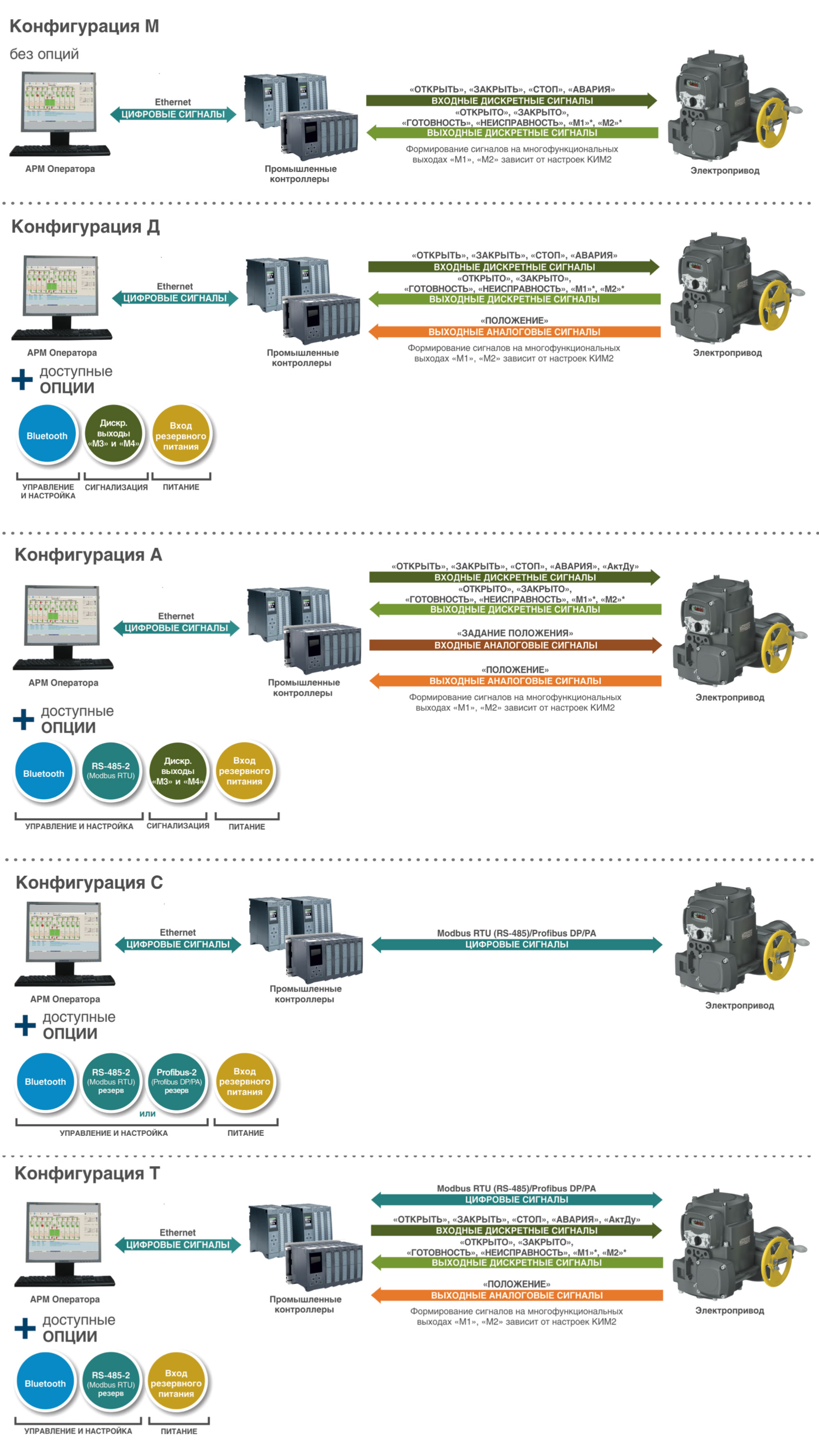
Управление электроприводом и арматурой через интеллектуальный блок КИМ2 осуществляется местно (с панели ПМУ) и дистанционно. Возможности дистанционного управления, состав и виды входных и выходных сигналов зависят от выбранной конфигурации и дополнительных опций.
Источник
«МЕХАНИЗМА КИМ2 Руководство по эксплуатации ЯЛБИ.421413.006 РЭ ЯЛБИ.421413.006 РЭ Всего листов 135 Содержание Лист Введение. . »
КОНТРОЛЛЕР ИСПОЛНИТЕЛЬНОГО
Руководство по эксплуатации
1.1 Назначение контроллера. 9
1.2 Технические характеристики. 9
1.3 Устройство и работа. 13 1.3.1 Конструкция. 13 1.3.2 Функции контроллера. 15 1.3.3 Функционирование контроллера при управлении ЭП. 16 1.3.4 Контроль температуры двигателя ЭП. 18 1.3.5 Защита от конденсации влаги. .
ЯЛБИ.421413.006 РЭ Авторские права на контроллер исполнительного механизма КИМ2 защищены патентами РФ .
Надежность работы контроллера исполнительного механизма КИМ2 обеспечивается как качеством изделия, так и соблюдением режимов и условий эксплуатации, а также выполнением других требований, изложенных в настоящем руководстве по эксплуатации .
В связи с систематически проводимыми работами по совершенствованию конструкции и технологии изготовления, возможны несущественные отклонения соответствующих данных, приведенных в руководстве по эксплуатации от фактических, не влияющие на технические характеристики изделия, и безопасность эксплуатации .
Обновление программного обеспечения контроллера (ver 3.0.0010) (июль 2018) .
введены типы датчиков положения: 5 – многооборотный шестеренчатый 3-х колесный на AS5045 и 6 – многооборотный шестеренчатый 4-х колесный на AS5045 (1.3.2.3, 2.3.2.4, приложения (В, Г) .
ЯЛБИ.421413.006 РЭ Список сокращений АВАР – авария (неисправность);
АПВ – автомат повторных включений;
АктДУ – активизация дискретного управления;
АЦП – аналого-цифровой преобразователь;
ВМТ – верхняя мертвая точка;
ДИСТ – дистанционное управление;
ИМУ – источники местного управления;
КВЗ – концевой выключатель закрытия;
КВО – концевой выключатель открытия;
М1, М2, М3, М4 – многофункциональные выходы;
МВЗ (или МЗ) – моментный выключатель закрытия;
МВО (или МО) – моментный выключатель открытия;
МДП – многооборотный датчик положения;
НМТ – нижняя мертвая точка;
ОТКЛ – отключен (отключение);
ПВЗ – путевой выключатель закрытия;
ПВО – путевой выключатель открытия;
ПИТ – питание (наличие основного питания);
ППЗУ – программируемое постоянное запоминающее устройство;
ШИМ – широтно-импульсная модуляция;
ЯЛБИ.421413.006 РЭ
Настоящее руководство по эксплуатации (далее – РЭ) распространяется на контроллер исполнительного механизма КИМ2 (далее – контроллер), применяемый в однооборотных и многооборотных электрических приводах и исполнительных механизмах (далее – ЭП) производства ОАО «АБС ЗЭиМ Автоматизация», и содержит техническое описание контроллера, инструкцию по правильной и безопасной его эксплуатации, транспортированию и хранению .
Нарушения требований безопасности (2.1.1) и настоящего РЭ могут создать угрозу для жизни и здоровья персонала из-за наличия опасного уровня напряжения в электрических цепях контроллера .
Перечень документов, на которые даны ссылки в настоящем РЭ, приведен в приложении А .
1.1 Назначение контроллера 1.1.1 Контроллер предназначен для работы в составе ЭП. Контроллер обеспечивает дистанционное и местное управление ЭП в составе автоматизированных систем управления технологическими процессами (АСУТП) на объектах в различных отраслях промышленности: энергетике, металлургии, в жилищно-коммунальном хозяйстве и др .
1.1.2 Контроллеры имеют климатические исполнения по ГОСТ 15150*:
— У1 с диапазоном рабочих температур от минус 40 до плюс 85 °С и относительной влажности до 100 % при температуре 25 °С;
— УХЛ1 с диапазоном рабочих температур от минус 60 до плюс 60 °С и относительной влажностью до 100 % при температуре 25 °С;
— В5 и ОМ1 с диапазоном рабочих температур от минус 40 до плюс 45 °С и относительной влажностью до 100 % при температуре 35 °С .
Условия эксплуатации контроллера определяются климатическим исполнением ЭП, в который он устанавливается .
1.1.3 Контроллер является микропроцессорным настраиваемым изделием. Предварительная настройка зависит от исполнения контроллера и осуществляется на предприятии-изготовителе .
В зависимости от выполняемых функций и вида связи с устройством верхнего уровня (компьютером или контроллером ПТК: КРОСС-500 производства ОАО «АБС ЗЭиМ Автоматизация» или другим контроллером АСУ ТП) контроллер имеет следующие конфигурации, определяемые входными и выходными сигналами (таблица 1):
— конфигурация М – для дистанционного управления ЭП используются входные дискретные сигналы «ОТКРЫТЬ», «ЗАКРЫТЬ», «СТОП», «АВАРИЯ». Выходными являются дискретные сигналы «ОТКРЫТО», «ЗАКРЫТО», «М1», «М2», «ГОТОВНОСТЬ», «НЕИСПРАВНОСТЬ»;
П р и м е ч а н и е – Здесь и далее «М1», «М2» – многофункциональные выходы (таблица 4), формирование сигнала зависит от настройки контроллера .
— конфигурация Д – для дистанционного управления ЭП используются входные дискретные сигналы «ОТКРЫТЬ», «ЗАКРЫТЬ», «СТОП», «АВАРИЯ». Выходными являются дискретные сигналы «ОТКРЫТО», «ЗАКРЫТО», «М1», «М2», «ГОТОВНОСТЬ», «НЕИСПРАВНОСТЬ» и аналоговый сигнал, пропорциональный текущему положению выходного органа ЭП (далее – аналоговый сигнал «ПОЛОЖЕНИЕ»);
— конфигурация А – для дистанционного управления ЭП используется входной аналоговый сигнал «ЗАДАНИЕ ПОЛОЖЕНИЯ» или дискретные сигналы «ОТКРЫТЬ», «ЗАКРЫТЬ», «СТОП», «АВАРИЯ», «АктДУ». Выходные сигналы соответствуют конфигурации Д;
— конфигурация С – для дистанционного управления ЭП используется цифровой сигнал по интерфейсу RS-485 (протокол Modbus RTU). Вся информация о состоянии контроллера и ЭП передается устройству верхнего уровня по интерфейсу RS-485;
— конфигурация Т – для дистанционного управления ЭП могут использоваться входные дискретные сигналы «ОТКРЫТЬ», «ЗАКРЫТЬ», «СТОП», «АВАРИЯ», «АктДУ» или цифровой сигнал по интерфейсу RS-485 (протокол Modbus RTU). Выходными являются дискретные сигналы «ОТКРЫТО», «ЗАКРЫТО», «М1», «М2», «ГОТОВНОСТЬ», «НЕИСПРАВНОСТЬ», аналоговый сигнал «ПОЛОЖЕНИЕ» и информация, передаваемая устройству верхнего уровня по цифровому интерфейсу RS-485 (протокол Modbus RTU) .
* Для контроллеров, подвергаемых нагреву солнцем при эксплуатации, верхнее значение диапазона рабочих температур должно приниматься ниже указанного на 15 °С .
ЯЛБИ.421413.006 РЭ Примечания 1 Для настройки контроллера при необходимости за отдельную плату заказываются:
— кабель СГ2 для подключения к компьютеру через интерфейс RS-232. Достаточно 1 шт. на партию контроллеров;
— кабель СГ-USB для подключения к компьютеру через интерфейс USB. Достаточно 1 шт. на партию контроллеров .
2 Для блокировки переключателя режимов управления при необходимости за отдельную плату заказывается навесной замок типа Apecs PDV-01-25 (или использовать аналогичный с дужкой диаметром 4 mm) .
1.2 Технические характеристики 1.2.1 Электрическое питание контроллеров осуществляется:
— от трехфазной сети переменного тока с номинальным напряжением 380 V и частотой (50±1) Hz по трехпроводной схеме с системой заземления TN-S по ГОСТ 30331.1. Допускается питание контроллеров от трехфазной сети переменного тока с номинальным напряжением 400 или 415 V и частотой (50±1) Hz, а также с номинальным напряжением 380 V и частотой (60±1) Hz .
— от однофазной сети переменного тока с номинальным напряжением 220 V и частотой (50±1) Hz с системой заземления TN-S по ГОСТ 30331.1. Допускается питание контроллеров от однофазной сети переменного тока с номинальным напряжением 230 или 240 V и частотой (50±1) Hz, а также с номинальным напряжением 220 V и частотой (60±1) Hz .
Допустимое изменение напряжения питания от 323 до 456 V для контроллеров с трехфазным питание и от 187 до 264 V для контроллеров с однофазным питанием .
1.2.2 Контроллеры сохраняют текущие параметры и данные архива работы ЭП при отключении напряжения питания .
1.2.3 Контроллер с опцией «Вход резервного питания» обеспечивает подключение внешнего резервного источника питания напряжением 24 V постоянного тока .
1.2.4 Контроллеры конфигураций М, Д, А и Т имеют один встроенный гальванически развязанный источник питания для внешних подключений с выходным стабилизированным напряжением 24 V при номинальном токе 50 mА. Допустимые отклонения напряжения от номинального значения ± 10 % .
1.2.5 Контроллеры имеют конструктивные исполнения «0», «1», «2» согласно рисунку 1, отличающиеся наличием и типом переходного фланца и положением лицевой панели контроллера .
1.2.6 Контроллер имеет встроенный терморегулируемый нагревательный элемент, подключенный между отдельными клеммами, с параметрами:
— напряжение питания 220 или 380 V в зависимости от исполнения контроллера по напряжению питания. В контроллерах трехфазного исполнения допустимо внешнее питание нагревательного элемента от сети с напряжением 220 V. Питание нагревательного элемента возможно от основной линии питания контроллера;
— мощность не более 5 W – для контроллера исполнения У1 при напряжении питания 220 и 380 V;
— мощность не более 120 W – для контроллера исполнения УХЛ1 при напряжении питания 220 V;
— мощность не более 290 W – для контроллера исполнения УХЛ1 при напряжении питания 380 V .
1.2.7 Потребляемая мощность контроллера при выключенном нагревательном элементе не более 10 W .
Ток потребления от резервного источника питания:
— при отсутствии основного питания не более 200 mA;
— при наличии основного питания не более 20 mA .
1.2.8 Масса контроллеров с электрическим подключением «2» не более:
— 9,0 kg – для конструктивного исполнения «0»;
— 7,8 kg – для конструктивного исполнения «1»;
— 10,0 kg – для конструктивного исполнения «2» .
Масса контроллеров с электрическим подключением «1» не более:
— 8,4 kg – для конструктивного исполнения «0»;
— 7,2 kg – для конструктивного исполнения «1»;
— 9,4 kg – для конструктивного исполнения «2» .
1.2.9 Габаритные размеры контроллера приведены в приложении Б .
1.2.10 Контроллер имеет встроенный бесконтактный (тиристорный) силовой коммутатор:
Сигнал на выходах «ЗАКРЫТО», «ОТКРЫТО», «М1», «М2», «М3», «М4» может быть инвертирован .
Выходы «ЗАКРЫТО» и «ОТКРЫТО» могут работать в режиме «сигналы» в соответствии с таблицей 5. В этом режиме выходы «ЗАКРЫТО» и «ОТКРЫТО» сигнализируют о состоянии арматуры .
Настроить режим «сигналы» для выходов «ЗАКРЫТО» и «ОТКРЫТО» можно одним из способов:
— с помощью кнопок, расположенных на лицевой панели, выбрав пункты меню / / / ;
— с помощью программы «Конфигуратор» в закладке «DO» выбрать «Настройки/Режим/ Сигналы/» .
Таблица 5 – Состояние выходов «ЗАКРЫТО» и «ОТКРЫТО» в режиме «сигналы» Состояние выхода Состояние арматуры «ЗАКРЫТО» «ОТКРЫТО» Закрыта Замкнут Разомкнут Выдает сигнал в Закрытие Разомкнут импульсном режиме Открыта Разомкнут Замкнут Выдает сигнал в Открытие Разомкнут импульсном режиме Остановлена в середине Замкнут Замкнут Не управляется контроллером* Разомкнут Разомкнут * Контроллер выключен или неисправен .
1.2.15 Нормируемые характеристики 1.2.15.1 Для контроллеров конструктивных исполнений «0» основная приведенная погрешность преобразования угла поворота выходного органа ЭП в цифровой код положения выходного органа ЭП (далее – положение) не более ±1 % в диапазоне от 0 до 90° .
Для контроллеров конструктивных исполнений «1» основная погрешность преобразования положения выходного органа ЭП в цифровой код определяется подключенным к контроллеру датчиком .
Для контроллеров конструктивных исполнений «2» основная приведенная погрешность преобразования угла поворота выходного органа ЭП в цифровой код положения не более ±1 % в диапазоне от 0 до 5 об ((0-1800)°) .
1.2.15.2 Для контроллеров конструктивных исполнений «0» и «2» основная приведенная погрешность преобразования угла поворота датчика момента в цифровой код момента не более ±1 % в диапазоне от 0 до 90° .
Для контроллеров конструктивных исполнений «1» основная погрешность преобразования крутящего момента на выходном органе ЭП (далее – момент) в цифровой код момента определяется подключенным к контроллеру датчиком .
1.2.15.3 Основная приведенная погрешность преобразования входного аналогового сигнала «ЗАДАНИЕ ПОЛОЖЕНИЯ» в цифровой код не более 1 % от диапазона изменения входного сигнала .
1.2.15.4 Основная приведенная погрешность преобразования цифровых кодов в выходной аналоговый сигнал «ПОЛОЖЕНИЕ» не более 0,5 % от диапазона изменения выходного сигнала .
1.2.15.5 Максимальная амплитуда пульсации не более 0,1 % от диапазона изменения выходного аналогового сигнала «ПОЛОЖЕНИЕ» .
1.2.15.6 Дополнительная приведенная погрешность соответствует требованиям таблицы 6 при следующих условиях:
а) при изменении напряжения питания от 85 до 110 % от номинального значения;
б) при воздействии внешних магнитных полей с напряженностью до 400 A/m .
1.2.15.7 Дополнительная приведенная погрешность при изменении температуры окружающего воздуха в диапазоне от минус 40 до плюс 85 C соответствует требованиям таблицы 7 .
Таблица 7 Параметр Значение Преобразование угла поворота датчика положения в цифровой код, не более ±0,5 % Преобразование угла поворота датчика момента в цифровой код, не более ±0,5 % Преобразование входного аналогового сигнала «ЗАДАНИЕ ПОЛОЖЕНИЯ» ±0,5 % в цифровой код, не более Преобразование цифрового кода в выходной аналоговый сигнал ±0,12 %/10 C «ПОЛОЖЕНИЕ», не более 1.2.16 Конструкция контроллера соответствует требованиям к системам управления по ГОСТ 12.2.003 .
1.2.17 По способу защиты человека от поражения электрическим током контроллер соответствует классу защиты 0I по ГОСТ 12.2.007.0 .
1.2.18 Степень защиты от проникновения твердых тел и воды для контроллеров – IР67, IР68 по ГОСТ 14254. Со стороны присоединения фланца степень защиты обеспечивается ЭП .
1.2.19 По устойчивости к воздействию атмосферного давления контроллер соответствует группе Р1 по ГОСТ Р 52931 .
1.2.20 По устойчивости и прочности к воздействию синусоидальной вибрации контроллер соответствует группе V1 по ГОСТ Р 52931 .
1.2.21 Контроллер выдерживает сейсмические воздействия интенсивностью 9 баллов по MSK-64 при уровне установки над нулевой отметкой 70 m (при отсутствии в месте установки контроллеров резонансов в диапазоне (1-30) Hz) в соответствии с ГОСТ 30546.1 .
1.2.22 Контроллер соответствует III группе исполнения по устойчивости к электромагнитным воздействиям в жесткой электромагнитной обстановке по ГОСТ 32137 для применения в системах нормальной эксплуатации, не влияющих на безопасность .
1.2.23 Контроллер выдерживает с критерием качества функционирования А по ГОСТ 32137:
— воздействие электростатического разряда по ГОСТ 30804.4.2 с испытательным напряжением импульса разрядного тока 6 kV при контактном разряде; 8 kV – при воздушном;
— воздействие наносекундной импульсной помехи по ГОСТ 30804.4.4 с амплитудой испытательных импульсов: 2 kV при схеме подключения «провод-земля»для цепей питания; 1 kV для линии связи;
— воздействие кондуктивных помех, наведенных радиочастотными электромагнитными полями, по ГОСТ Р 51317.4.6 с полосой частот от 150 kHz до 80 MHz и испытательным напряжением 10 V .
1.2.24 Контроллер выдерживает воздействие динамических изменений напряжения в сети электропитания переменного тока с критерием качества функционирования В по ГОСТ 30804.4.11:
— провалов напряжения на 30 % в течение 1000 ms;
— выбросов напряжения на 20 % в течение 1000 ms;
— прерывания напряжения на 100 % в течение 100 ms .
ЯЛБИ.421413.006 РЭ
1.2.25 Уровень индустриальных радиопомех, излучаемых при работе контроллера, не превышает значений, установленных ГОСТ Р 51318.11 для оборудования класса А группы 1 .
1.2.26 Контроллер устойчив к воздействию внешних магнитных полей с напряженностью до 400 A/m .
1.2.27 Средний срок службы контроллера 15 лет .
1.3 Устройство и работа 1.3.1 Конструкция 1.3.1.1 Основные составные части контроллера: корпус, размещенные внутри корпуса платы с электронными компонентами, присоединительный фланец, лицевая панель, клеммный отсек с кабельными вводами, батарейный отсек, крышка. Внешний вид контроллера в зависимости от конструктивного исполнения представлен на рисунке 1 .
1.3.1.2 На лицевой панели (рисунок 2) расположены органы индикации, защищенные смотровым окном, и органы управления, образующие панель местного управления (далее – ПМУ) .
Органы индикации контроллера:
— четырехразрядный цифровой индикатор (далее – цифровой индикатор), обеспечивающий индикацию текущего положения выходного органа и момента на выходном органе ЭП, %, при основном и батарейном питании контроллера;
— светодиодные индикаторы «ДИСТ», «АВАР», «МЕСТ», » » (закрыто), «МОМ», » » (открыто) (при основном и батарейном питании контроллера) .
Органы управления контроллера:
— переключатель режимов управления (селектор) с положениями: «МЕСТ», «ДИСТ» – рабочие режимы работы контроллера; «0» (останов) – режим настройки контроллера (2.4.1.1). Переключатель режимов управления может быть заблокирован в любом положении с помощью навесного замка;
— кнопки: » » (» » – открыть), «» (» » – закрыть), » » («СТОП») и » » («СБРОС») .
1.3.1.3 Действие кнопок и индикация для режима настройки описаны в подразделе 2.3 «Настройка», для рабочих режимов – в подразделе 2.4 «Использование контроллера в составе ЭП» .
а) контроллер конструктивного исполнения «0» (для механизмов МЭО(Ф)-08(09)К) б) контроллер конструктивного исполнения «1» (для механизмов МЭО(Ф)-10(К))
1.3.2 Функции контроллера 1.3.2.1 Контроллер обеспечивает местное (2.4.3) или дистанционное (2.4.4) управление ЭП и арматурой .
1.3.2.2 Вид и способ управления определяется конфигурацией, опциями и параметрами настройки. Меню контроллера представлено в приложении В, параметры настройки – в приложении Г .
1.3.2.3 На основе данных, полученных от датчиков положения и момента, контроллер выполняет:
— индикацию текущих значений положения и момента на цифровом индикаторе;
— отключение двигателя ЭП при достижении выходным органом ЭП крайних положений или заданного момента;
— формирование выходных сигналов «ОТКРЫТО», «ЗАКРЫТО», «ПОЛОЖЕНИЕ»;
— передачу информации о состоянии ЭП устройству верхнего уровня .
1.3.2.4 Контроллер может управляться аналоговым сигналом «ЗАДАНИЕ ПОЛОЖЕНИЯ», т.е. выполнять функцию позиционера (2.3.2.6) .
1.3.2.5 Контроллер обеспечивает самодиагностику, контроль состояния и защиту (выключение) ЭП, в том числе обработку сигнала от датчика температуры ЭД (1.3.4 ), контроль наличия напряжения и величины тока в обмотках одной или двух фаз ЭД (1.3.5 ). Виды и параметры срабатывания защит приведены в подразделе 2.4.5 «Режим «останов/настройка». Просмотр кодов неисправности» .
1.3.2.6 Контроллер записывает в архив данные о состоянии ЭП и контроллера (1.3.9 ) .
1.3.2.7 Настройку и тестирование контроллера, а также управление ЭП можно осуществить:
— с помощью кнопок на лицевой панели;
— с помощью КПК с операционной системой Android при наличии опции «Bluetooth» на расстоянии до 7 m в условиях прямой видимости;
— с помощью компьютера с программой «Конфигуратор или «Эмулятор пульта настройки» (ЭПН) через интерфейсы RS-232 (кабель СГ2), USB (кабель СГ-USB) или по беспроводному интерфейсу Bluetooth при наличии опции «Bluetooth» (на компьютере должен быть установлен адаптер беспроводного интерфейса Bluetooth) .
1.3.3 Функционирование контроллера при управлении ЭП При поступлении команды «ОТКРЫТЬ» или «ЗАКРЫТЬ» контроллер подает питание на двигатель ЭП, выходной орган ЭП движется в соответствии с поступившей командой .
При неправильном направлении движения выходного органа ЭП контроллер выключает двигатель ЭП и формирует неисправность «Неверное направление движения». Изменить направление движения можно настройкой параметра С3. При изменении чередования фаз выполняется автоматическая коррекция направления движения (при трехфазном питании и значении параметра A12=2) .
При установке значения параметра J8=0 контроль направления движения не выполняется .
ВНИМАНИЕ: ИСПОЛЬЗОВАНИЕ РУЧНОГО ПРИВОДА ПРИ НАЛИЧИИ
СИГНАЛОВ УПРАВЛЕНИЯ МОЖЕТ ПРИВЕСТИ К ОШИБКЕ В ОПРЕДЕЛЕНИИ
НАПРАВЛЕНИЯ ДВИЖЕНИЯ !
Контроллер обеспечивает два способа выключения ЭД в крайних положениях выходного органа ЭП:
а) по положению выходного органа ЭП;
б) по моменту выходного органа ЭП (уплотнение) .
Выбор способа выключения ЭД задается настройкой параметра С4 (уплотнение) .
П р и м е ч а н и е – Описание параметров приведено в приложении Г .
При выключении по положению значение параметра С4 = 0 (нет уплотнения), при этом двигатель ЭП выключается при достижении выходным органом ЭП положений «ЗАКРЫТО» (0 %) или «ОТКРЫТО» (100 %) .
Значение защитного ограничения момента задается значениями параметров D5 и D10 .
Во время пуска ЭД пусковой момент ограничен значением произведения параметров D5 и D6 в направлении закрытия и произведения параметров D10 и D11 в направлении открытия (D6 и D11 – кратность пускового момента). Пусковой момент действует в течение времени заданного параметром J6 (время пуска) .
При превышении момента двигатель ЭП выключается, движение ЭП в данном направлении блокируется. По истечении времени заданного параметром А3 (задержка включения сигнала защиты по моменту) и, если значение момента на выходном органе ЭП по прежнему превышает значение ограничения момента, формируется сигнал «НЕИСПРАВНОСТЬ» («Превышение допустимого значения момента») .
После снятия превышения момента и по истечении времени заданного параметром А4 сигнал «НЕИСПРАВНОСТЬ» снимается .
Значения параметров D5, D6, D10, D11 задаются для ограничения крутящего момента при перемещении запорно-регулирующего элемента арматуры и обеспечения защиты арматуры и ЭП от поломок при заклинивании .
Для компенсации выбега в положениях «ОТКРЫТО» и «ЗАКРЫТО» могут использоваться параметры D1 и D2, задающие смещение точки выключения ЭД при открытии и закрытии соответственно .
При выключении по моменту значение параметра С4 = 1 (уплотнение при закрытии) или С4 = 2 (уплотнение всегда), при этом ЭД выключается если момент на выходном органе ЭП достигает заданного значения момента уплотнения .
ЯЛБИ.421413.006 РЭ
В этом случае движение выходного органа ЭП разделено на зоны (рисунок 3), в каждой зоне пороги срабатывания ограничителя момента задаются определенными параметрами:
— зона движения – зона ограничена значениями параметров (0+D13) в направлении закрытия и (100 – D8) в направлении открытия. Ограничение момента выполняет защитные функции. Порог срабатывания ограничителя момента задается параметрами D5 и D10 в направлениях открытия и закрытия соответственно;
— зона уплотнения – зона начинается с положения заданного параметром (0+D13) в направлении закрытия и с положения заданного параметром (100 – D8) в направлении открытия .
В этой зоне порог срабатывания ограничителя момента задается параметрами D7 и D12, при этом происходит останов с уплотнением;
— зона страгивания – зона начинается с положения заданного параметром (0+D13) в направлении открытия и с положения заданного параметром (100 – D8) в направлении закрытия .
В этой зоне порог срабатывания ограничителя момента задается параметрами D9 и D14, при этом происходит страгивание арматуры из уплотненного состояния .
Рисунок 3 – Зависимость порога срабатывания ограничителя момента от положения выходного органа ЭП При поступлении команды на контроллер выполняется пуск ЭД, время пуска заданно параметром J6, а момент выключения задается значениями произведений D10D11 и D5D6. Если выходной орган ЭП в момент пуска находится в зоне страгивания, то порог срабатывания ограничения момента задается параметрами D9 и D14 .
По прошествии времени пуска ограничение момента задается параметрами D5 и D10 .
При входе в зону уплотнения момент выключения задается параметрами D7 и D12. При этом выполняется уплотнение запорного органа арматуры .
При превышении момента в зоне уплотнения формируются сигналы «ОТКРЫТО» или «ЗАКРЫТО» в зависимости от достигнутого конечного положения и движение ЭП в данном направлении блокируется. При превышении момента в зоне движения или в зоне страгивания формируется сигнал «НЕИСПРАВНОСТЬ» («Превышение допустимого значения момента») и движение ЭП в данном направлении блокируется .
ЯЛБИ.421413.006 РЭ Уплотнение может выполняться непрерывно или импульсами для более точного достижения момента уплотнения (D7 или D12). Необходимость и особенности импульсного уплотнения задаются параметрами C5, C6, С7. При С6 = 0 действует непрерывное уплотнение. Импульсное уплотнение начинается, если момент на выходном органе ЭП достиг значения, задаваемого параметрами (D7– C5) при открытии и (D12– C5) при закрытии. При С5 = 0 импульсное уплотнение не используется .
При уплотнении также контролируется ток ЭД (J3J5) и время уплотнения (J7). При превышении значений этих параметров срабатывает защитное отключение, сигнал «НЕИСПРАВНОСТЬ» при этом не формируется, устройству верхнего уровня передается предупреждение. Признаки предупреждений сбрасываются при подаче команды управления на движение выходного органа ЭП в обратном направлении .
1.3.4 Контроль температуры двигателя ЭП Контроль температуры двигателя ЭП осуществляется на основе данных, полученных от датчика температуры двигателя ЭП. Наличие и тип датчика температуры ЭД определяется параметром А5. При увеличении сопротивления (более 1,5 кОм; А5=1 или А5=2) или размыкании контактов (А5=3) датчика температуры контроллер выключает ЭД и формирует сигнал «НЕИСПРАВНОСТЬ» («Перегрев ЭД»). Подключение датчика температуры ЭД к контроллеру осуществляется на предприятии-изготовителе ЭП. Время включения защиты по температуре ЭД определяется параметром А6. Время выключения защиты после пропадания сигнала от датчика определяется параметром А7. При значении A7 от 0 до 4 защита автоматически не отключается .
1.3.5 Защита от конденсации влаги Для предотвращения конденсации влаги во внутреннем пространстве контроллера выполняется подогрев внутреннего объема встроенным терморегулируемым нагревательным элементом .
1.3.6 Работа при температуре окружающей среды ниже минус 40 °С Контроллер имеет терморегулируемый нагревательный элемент для поддержания оптимальной температуры внутри корпуса для обеспечения нормального функционирования. Для исполнения УХЛ1, температура внутри корпуса контроллера автоматически поддерживается посредством включения и выключения нагревательного элемента и определяется параметрами А10 и А11. Электрическое питание на контроллер должно быть подано при температуре выше минус 40°С, включение контроллера при температуре ниже минус 40°С не гарантируется .
Питание терморегулируемого нагревательного элемента возможно как от отдельной электрической сети, так и от основной сети электрического питания ЭП. В последнем случае на клеммной колодке/разъеме контроллера устанавливаются перемычки между клеммами нагревательного элемента и клеммами электрического питания контроллера .
1.3.7 Работа от батареи автономного питания Для резервного питания местной индикации при отсутствии других источников питания используется батарея автономного питания. В контроллер установлены элементы питания типа LR03 (ААА) в количестве трех штук .
Включение автономного питания контроллера осуществляется нажатием кнопки » » .
При автономном питании контроллера на цифровой индикатор выводится текущее значение положения или момента на выходном органе ЭП. Состояния концевых и моментных выключателей отображаются светодиодными индикаторами » «, «МОМ», » «, наличие неисправности индикатором «АВАР» .
При автономном питании считается, что переключатель режимов управления находится в положении «0» (останов) – режим «останов/настройка» и доступна настройка контроллера для подготовки использования ЭП при отключенном электропитании .
Автономное питание контроллера автоматически выключается, если в течение 30 s не изменилось положение выходного органа ЭП или не были нажаты кнопки ПМУ .
ВНИМАНИЕ: ПОСТАВЛЯЕМАЯ БАТАРЕЯ ОБЕСПЕЧИВАЕТ ИНДИКАЦИЮ В
АВТОНОМНОМ РЕЖИМЕ ПРИ ТЕМПЕРАТУРЕ НЕ НИЖЕ МИНУС 20 °С. ПРИ
ЭКСПЛУАТАЦИИ КОНТРОЛЛЕРА ПРИ ТЕМПЕРАТУРЕ НИЖЕ МИНУС 20 °С
РЕКОМЕНДУЕТСЯ ИСПОЛЬЗОВАТЬ БАТАРЕЮ С СООТВЕТСТВУЮЩИМ
РАБОЧИМ ДИАПАЗОНОМ ТЕМПЕРАТУР !
Контроллер отслеживает следующие электрические параметры:
— наличие напряжения в цепях В и C;
— чередование фаз напряжения в цепях В и С .
При выходе параметров за допустимые пределы срабатывает защита и формируется сигнал «НЕИСПРАВНОСТЬ». Коды и наименование неисправностей, обнаруженных при электроконтроле, приведены в подразделе 2.4.5 «Режим «останов/настройка. Просмотр кодов неисправности» (таблица 21) .
При изменении порядка чередования фаз в сети питания автоматически корректируется направление включения ЭД .
П р и м е ч а н и е – Тип электроконтроля определяется параметром А12:
— 1 – контролируется одна фаза (контроллер с однофазным питанием);
— 2 – контролируются две фазы (контроллер с трехфазным питанием) .
1.3.9 Архив 1.3.9.1 Контроллер создает архив статистических данных о работе и состоянии ЭП в энергонезависимой памяти .
Данные архива могут быть просмотрены и сохранены в файл с помощью программы «Конфигуратор» (приложение Д). Анализ данных архива может использоваться с целью определения правильности функционирования и степени износа для своевременного предотвращения сбоев и проведения планово предупредительных (профилактических) работ .
1.3.9.2 Статистические данные представляют собой две одинаковые группы данных о работе и состоянии ЭП, одна из которых содержит данные, накапливаемые с момента изготовления ЭП, другая – с момента сброса (обнуления) этих данных .
В статистические данные входят:
— количество включений двигателя ЭП;
— время работы двигателя ЭП;
— количество операций открытия и закрытия (полного хода из положения «ЗАКРЫТО» в положение «ОТКРЫТО» и наоборот);
— количество срабатываний защиты электроконтроля;
— количество срабатываний защиты по моменту;
— количество срабатываний защиты от перегрева двигателя ЭП;
— длительность последнего включения двигателя ЭП;
— время последнего полного хода выходного органа ЭП .
Не регистрируются предупреждения, связанные с питанием от батареи .
1.3.10 Заводские настройки В энергонезависимой памяти контроллера хранится резервная копия заводских настроек всех параметров и данных настройки датчиков, специфичных для конкретного ЭП. Загрузить эти данные из резервной копии можно в программе «Конфигуратор» (закладка «Управление» – команда «Зав. настройки») или через меню контроллера (приложение В) .
1.4 Маркировка и упаковка 1.4.1 На каждом контроллере крепится табличка по ГОСТ 26828, на которой нанесены:
— зарегистрированный товарный знак предприятия-изготовителя;
— условное обозначение контроллера;
— номинальное напряжение питания;
— частота напряжения питания;
— порядковый номер контроллера по системе нумерации предприятия-изготовителя;
1.4.2 Внутри корпуса контроллера около батарейного отсека указаны электрохимическая система и номинальное напряжение батареи автономного питания для ее правильной замены .
1.4.3 Упаковывание и консервация контроллера производятся в составе ЭП в соответствии с требованиями конструкторской документации на ЭП .
ЯЛБИ.421413.006 РЭ
2 Использование по назначению
2.1 Эксплуатационные ограничения 2.1.1 При эксплуатации контроллера необходимо соблюдать требования безопасности для электроустановок напряжением до 1000 V* .
2.1.2 К работе с контроллером допускается персонал, изучивший его работу по эксплуатационной документации, прошедший инструктаж на рабочем месте и имеющий допуск к эксплуатации электроустановок напряжением до 1000 V .
2.1.3 При эксплуатации контроллера в составе ЭП необходимо соблюдать меры безопасности, указанные в эксплуатационной документации на ЭП .
2.1.4 Во избежание поражения электрическим током все внешние соединения производить при выключенном напряжении питания. На щите управления при этом должна быть табличка с надписью «НЕ ВКЛЮЧАТЬ, РАБОТАЮТ ЛЮДИ» .
2.1.5 Запрещается эксплуатировать оборудование и кабели с механическими повреждениями .
2.1.6 Подача питающего напряжения на контроллер при первом запуске после монтажа ЭП с контроллером на месте применения или после обесточивания в процессе эксплуатации на время более 2 h осуществляется при температуре не ниже минус 40 °С .
2.1.7 При установке ЭП с контроллером на месте эксплуатации заземляющее устройство должно быть подсоединено к элементам заземления на корпусе контроллера и ЭП .
2.2 Подготовка контроллера к использованию 2.2.1 Проверка перед использованием 2.2.1.1 Перед использованием контроллера проверить:
— отсутствие повреждений: трещин, вмятин и других дефектов на корпусе контроллера и ЭП;
— наличие всех крепежных элементов (винтов, шайб). Все крепежные винты должны быть затянуты. Детали с резьбовым креплением (заглушки, кабельные вводы) должны быть завинчены до упора;
— наличие средств уплотнения (для кабелей);
— наличие элементов заземления и заземляющих устройств;
— наличие заглушек в неиспользованных резьбовых отверстиях клеммного отсека .
2.2.1.2 Перед электрическим подключением проверить уровень заряда батареи автономного питания. Для включения питания от батареи нажать кнопку » » на лицевой панели. Должны включиться цифровой индикатор (отображается значения положения или момента) и светодиодные индикаторы, соответствующие режиму работы контроллера. После подачи напряжения питания, контроллер автоматически проверяет уровень заряда батареи и, если батарея имеет низкий заряд или разряжена, на цифровом индикаторе будет периодически (период около 20 с) в течение 5 с появляться индикация (Low battery). Дополнительно можно посмотреть код предупреждения (подраздел 2.4.5 «Режим «останов/настройка». Просмотр кодов неисправности»). Для обеспечения функции резервного питания местной индикации необходимо заменить элементы батареи автономного питания по 3.5 .
2.2.2 Подключение внешних сигналов 2.2.2.1 Электрические схемы контроллеров приведены в приложении Ж. Примеры схем подключения контроллеров представлены в документе «Схемы подключения интеллектуальных приводов и механизмов с контроллером КИМ2» ЯЛБИ.420006.011Д (размещен на сайте:
http://www.zeim.ru/institute/connect/). Для защиты от короткого замыкания контроллер необходимо подключать через автоматический выключатель .
*При поставках на единой таможенной территории Таможенного союза в соответствии с действующими «Правилами устройства электроустановок», «Правилами технической эксплуатации электроустановок потребителей» и «Правилами по охране труда при эксплуатации электроустановок». При поставках на экспорт в соответствии с нормативными документами страны, куда поставляется контроллер .
ЯЛБИ.421413.006 РЭ 2.2.2.2 Внешний вид и назначение контактов соединителей контроллера представлены в приложении И .
2.2.2.3 На контроллеры с электрическим подключением «2» можно установить по два кабельных ввода М32х1,5, М25х1,5, М20х1,5 (рисунок 4а). На контроллеры с электрическим подключением «1» можно установить четыре кабельных ввода (один М32х1,5, два М25х1,5, один М20х1,5) или пять кабельных вводов (один М25х1,5, четыре М20х1,5) (рисунок 4б). Расположение кабельных вводов – по усмотрению потребителя. Неиспользуемые резьбовые отверстия и кабельные вводы в клеммном отсеке должны быть закрыты заглушками, обеспечивающими необходимую защиту .
2.2.2.4 Конструкция клеммного отсека контроллера позволяет производить подключение гибкими кабелями или отдельными проводами, проложенными в металлорукавах или трубах (далее – кабель). Типоразмер кабеля должен соответствовать типоразмеру кабельного ввода .
Внешние провода силовых и сигнальных (управляющих) цепей рекомендуется подключать через разные кабельные вводы. Подключение осуществлять многожильным медным кабелем с сечением проводов не менее 0,5 mm2, рекомендуемое сечение – (0,5-2,5) mm2 для сигнальных цепей и (0,75-4,00) mm2 для силовых цепей. Для исключения влияния электромагнитных полей для сигнальных цепей рекомендуется использование экранированных кабелей. Подключение цепей аналоговых сигналов и интерфейса RS-485 (конфигурации С и Т; опции «RS-485-2», «Profibus-1», «Profibus-2») осуществлять экранированной витой парой. Требования к кабелю для подключения к сети Profibus DP приведены в приложении Н. Заземляющий провод должен иметь сечение не менее 4 mm2 .
2.2.3 Включение контроллера При включении контроллера работа светодиодных индикаторов осуществляется согласно 2.4.2.4 (таблица 11). Необходимость настройки и коды обнаруженных неисправностей отображаются с помощью цифрового индикатора согласно подразделу 2.4.5 «Режим «останов/настройка» .
Просмотр кодов неисправности» .
2.3 Настройка 2.3.1 Общие указания 2.3.1.1 Режим «останов/настройка» (переключатель режимов управления в положении «0») предназначен для установки параметров и особенностей управления контроллера, определяющих работу ЭП в различных ситуациях .
ВНИМАНИЕ: НЕПРАВИЛЬНАЯ НАСТРОЙКА КОНТРОЛЛЕРА НА
ЭЛЕКТРОПРИВОДЕ МОЖЕТ ПРИВЕСТИ К ВЫХОДУ ИЗ СТРОЯ АРМАТУРЫ !
2.3.1.2 Заводская настройка, включая тарирование многооборотного датчика положения и настройку характеристики датчика момента в соответствии с типом и параметрами ЭП, производится на предприятии-изготовителе ЭП согласно приложению К. Заводская настройка может быть восстановлена выбором соответствующего пункта меню контроллера .
2.3.1.3 При установке контроллера в составе ЭП на арматуру необходимо выполнить:
— настройку рабочего диапазона датчика положения, соответствующего диапазону рабочего хода выходного органа ЭП;
— настройку параметров ограничения крутящего момента при открытии и закрытии;
— настройку сетевых параметров – для контроллеров конфигурации С и Т или при наличии опций «RS-485-2», «Profibus-1», «Profibus-2» .
Остальные параметры настраиваются при необходимости, если заводские настройки параметров (приложение Г) не удовлетворяют требованиям потребителя .
2.3.1.4 Настройка производится при подключенном напряжении питания. Настройку контроллера можно произвести:
— по интерфейсам RS-232 или USB с помощью компьютера с использованием программы «Конфигуратор» (приложение Д). Подключение к компьютеру осуществляется кабелем СГ2 или СГ-USB соответственно;
— по беспроводному интерфейсу Bluetooth с помощью КПК с использованием программы «Конфигуратор» для Android при наличии опции «Bluetooth» .
Настройка контроллера по интерфейсам RS-232, USB или Bluetooth выполняется при любом положении переключателя режимов управления .
ЯЛБИ.421413.006 РЭ
2.3.2 Настройка с помощью кнопок ПМУ 2.3.2.1 Порядок настройки 2.3.2.1.1 Для входа в меню настройки необходимо при установленном в положение «0» переключателе режимов управления нажать и удерживать кнопки » » и » » в течение 3 s (до появления на цифровом индикаторе надписи ) .
Выход из меню настройки выполняется любым из способов:
— при нажатии кнопки » » в пункте меню ;
— при нажатии в течение 3 s кнопок » » и » » в любом пункте меню;
— автоматически через 5 min после последнего нажатия любой кнопки .
ПРИ ВЫХОДЕ ИЗ МЕНЮ НАСТРОЙКИ ПРОИСХОДИТ ПЕРЕЗАПУСК
2.3.2.1.2 Структура и описание меню контроллера в режиме «Останов/настройка» представлены в приложении В. При переходе по пунктам меню действие кнопок соответствует таблице 8 .
В режиме настройки нажатие кнопки » » сопровождается включением индикатора «АВАР», кнопки » » – индикатора «МОМ», кнопки «» – индикатора «ДИСТ», кнопки » » – индикатора «МЕСТ» .
ЯЛБИ.421413.006 РЭ 2.3.2.3 Настройка датчика положения 2.3.2.3.1 Настройка датчика положения может проводиться при уровне доступа .
При настройке датчика положения выполняется «привязка» рабочего диапазона датчика к коду датчика положения, соответствующего положению «ЗАКРЫТО» ( ) или «ОТКРЫТО» ), затем уточняется противоположное положение .
( Порядок настройки датчика положения представлен на рисунке 6 .
Примечания 1 Числовые значения приведены в качестве примера .
2 Возможна настройка только для одного положения, при этом фиксируется одно из положений «ЗАКРЫТО» или «ОТКРЫТО» без изменения другого .
* Вход в режим настройки и выход из него по 2.3.2.1.1 .
** Выходной орган ЭП должен быть установлен в положение «ЗАКРЫТО» .
*** Для выхода с сохранением нового кода нажать кнопку » «, затем, удерживая ее, кнопку » » .
**** Выходной орган ЭП должен быть установлен в положение «ОТКРЫТО» .
Рисунок 6 – Настройка датчика положения 2.3.2.4 Настройка параметров ограничения момента 2.3.2.4.1 Разрешение уплотнения при открытии/закрытии Разрешение уплотнения при открытии/закрытии заключается в установке требуемого значения параметра – при закрытии, – при закрытии и открытии .
Порядок разрешения уплотнения при закрытии представлен на рисунке 7 .
П р и м е ч а н и е — Числовые значения приведены в качестве примера .
2.3.2.4.2 Настройка ограничения момента в зоне движения Настройка ограничения момента при открытии/закрытии заключается в установке требуемых значений момента выключения при открытии/закрытии ( / ) .
Порядок настройки ограничения момента при открытии/закрытии представлен на рисунке 8 .
П р и м е ч а н и е — Числовые значения приведены в качестве примера .
2.3.2.4.3 Настройка ограничения момента уплотнения Настройка ограничения момента уплотнения при открытии/закрытии заключается в установке требуемого значения момента выключения в зоне уплотнения (рисунок 3) в положении «ОТКРЫТО»/ «ЗАКРЫТО» ( / ) .
Порядок настройки ограничения момента уплотнения при открытии/закрытии представлен на рисунке 9 .
П р и м е ч а н и е — Числовые значения приведены в качестве примера .
* Вход в режим настройки и выход из него по 2.3.2.1.1 .
** Для выхода с сохранением нового значения нажать кнопку » «, затем, удерживая ее, кнопку » » .
Рисунок 9 – Настройка ограничения момента уплотнения при открытии/закрытии ЯЛБИ.421413.006 РЭ 2.3.2.4.4 Настройка ограничения момента страгивания Настройка ограничения момента страгивания из положения «ОТКРЫТО»/ «ЗАКРЫТО» заключается в установке требуемого значения момента выключения при страгивании из положения «ОТКРЫТО»/ «ЗАКРЫТО» ( / ) (рисунок 3) .
Порядок настройки ограничения момента страгивания из положения «ОТКРЫТО»/»ЗАКРЫТО» представлен на рисунке 10 .
П р и м е ч а н и е — Числовые значения приведены в качестве примера .
* Вход в режим настройки и выход из него по 2.3.2.1.1 .
** Для выхода с сохранением нового значения нажать кнопку » «, затем, удерживая ее, кнопку » » .
Рисунок 10 – Настройка ограничения момента страгивания из положения «ОТКРЫТО»/»ЗАКРЫТО» 2.3.2.5 Настройка управления сигналом «ЗАДАНИЕ ПОЛОЖЕНИЯ» (контроллер конфигурации А) Настройка заключается в установке требуемых значений параметров группы согласно приложению Г .
2.3.2.6 Определение действия по сигналу «АВАРИЯ» Действие ЭП по сигналу «АВАРИЯ» определяется параметром. Настройка заключается в установке требуемого значения согласно приложению Г .
Более подробно функционирование и настройка сигнала «АВАРИЯ» описаны в подразделе 2.4.4.2 «Сигнал «АВАРИЯ» .
Порядок настройки действия по сигналу «АВАРИЯ» представлен на рисунке 11 .
П р и м е ч а н и е — Числовые значения приведены в качестве примера .
* Вход в режим настройки и выход из него по 2.3.2.1.1 .
** Для выхода с сохранением нового значения нажать кнопку » «, затем, удерживая ее, кнопку » » .
Рисунок 12 – Настройка сетевых параметров ЯЛБИ.421413.006 РЭ
2.4 Использование контроллера в составе ЭП 2.4.1 Режимы работы контроллера 2.4.1.1 Контроллер обеспечивает следующие режимы работы контроллера:
дистанционное управление (2.4.4);
Режим задается положением переключателя режимов управления (селектора) (рисунок 2):
— «МЕСТ» – режим местного управления. Контроллер обеспечивает управление ЭП только с помощью кнопок, расположенных на ПМУ;
— «ДИСТ» – режим дистанционного управления. Контроллер обеспечивает управление ЭП внешними дискретными, аналоговыми сигналами или сигналами по интерфейсу RS-485;
— «0» (останов) – режим «останов/настройка». Контроллер блокирует управление ЭП. В режиме «останов/настройка» выполняется настройка контроллера по 2.3 и просмотр кодов неисправности по 2.4.5 .
Переключатель режимов управления может быть заблокирован в одном из положений с помощью навесного замка .
2.4.2 Индикация 2.4.2.1 После включения питания контроллера на цифровой индикатор в течение 2 s выводится последний зарегистрированный в энергонезависимой памяти код неисправности в виде. Затем на цифровой индикатор выводятся значения положения и момента в соответствии с параметрами группы М ( ) приложения Г .
2.4.2.2 Показания датчика момента выводятся на цифровой индикатор, если датчик разрешен параметром .
2.4.2.3 При наличии неисправности контроллера или ЭП код неисправности в виде будет появляться на цифровом индикаторе периодически, наряду с другими видами индикации .
2.4.2.4 Условия включения светодиодных индикаторов в режимах управления ЭП приведены в таблице 11 .
Таблица 11 – Работа светодиодных индикаторов при управлении ЭП Светодиодный Состояние индикатор светодиодного Условия включения индикатора Включен или При обнаружении неисправности «АВАР» мигает Если контроллер находится в дистанционном режиме управВключен «ДИСТ» ления ЭП При превышении момента открытия или закрытия Включен «МОМ» Если контроллер находится в местном режиме управления ЭП Включен «МЕСТ» Мигает При включении ЭД в направлении закрытия «ЗАКР» Включен В положении «ЗАКРЫТО» Мигает При включении ЭД в направлении открытия «ОТКР» Включен В положении «ОТКРЫТО» 2.4.3 Местное управление 2.4.3.1 Режим местного управления ЭП предназначен для управления непосредственно на месте установки ЭП. В данном режиме управление осуществляется с помощью кнопок ПМУ .
2.4.3.2 Действие кнопок в режиме местного управления представлено в таблице 12 .
ЯЛБИ.421413.006 РЭ ЯЛБИ.421413.006 РЭ 2.4.4 Дистанционное управление 2.4.4.1 Источники управления В режиме дистанционного управления ЭП контроллер имеет несколько источников управления, представленных в таблице 13. Источники управления перечислены в порядке убывания приоритета .
Некоторые источники управления могут быть разрешены или запрещены параметром настройки, разрешенный источник может быть активным или пассивным .
Управление получает наиболее приоритетный из активных источников. Если управляющий источник становится пассивным, управление получает следующий наиболее приоритетный из активных .
Источники управления: сетевое местное командное управление, пульт настройки и автомат повторных включений (АПВ) относятся к источникам местного управления (далее – ИМУ) .
Они выполняют функции вспомогательного ручного или специального управления. При сетевом дистанционном командном управлении источники местного управления могут быть запрещены («Запретить ИМУ») или разрешены («Разрешить ИМУ») сетевой командой. Остальные источники управления предназначены для дистанционного управления ЭП в составе АСУТП .
2.4.4.2 Сигнал «АВАРИЯ» Сигнал «АВАРИЯ» предназначен для выполнения определенных действий в аварийной ситуации при дистанционном управлении и обладает наивысшим приоритетом .
Сигнал «АВАРИЯ» может быть подан либо на дискретный вход «АВАРИЯ», либо в цифровом виде по сетевому интерфейсу .
Дискретный вход «АВАРИЯ» может быть прямым или инвертированным. Если дискретный вход «АВАРИЯ» прямой, то при подаче на него напряжения появляется сигнал «АВАРИЯ», если дискретный вход инвертированный, то на нем, если нет аварии, должно присутствовать напряжение, а при появлении аварийной ситуации напряжение отключается и формируется сигнал «АВАРИЯ». Инверсию дискретного входа «АВАРИЯ» можно задать в пункте меню ЯЛБИ.421413.006 РЭ
2.4.4.3 Дискретные входные сигналы управления
Контроллер имеет следующие дискретные сигналы управления, действующие в дистанционном режиме управления ЭП:
— «ОТКРЫТЬ» – включение двигателя ЭП в направлении открытия;
— «ЗАКРЫТЬ» – включение двигателя ЭП в направлении закрытия;
— «СТОП» – выключение двигателя ЭП при четырехпроводном импульсном управлении (Е2=2);
— «АктДУ» – повышение приоритета дискретного управления. При повышенном приоритете дискретное управление работает независимо от значения параметра E1. Управление приоритетом дискретных сигналов позволяет организовать резервное управление, если в качестве основного используется другой источник управления .
Дискретные входные сигналы представляют собой входы с одним общим контактом и гальванической развязкой от остальной схемы. Электрические параметры дискретных входов указаны в таблице 3 .
Управление дискретными сигналами задается параметрами группы Е:
— E1 – разрешение управления дискретными сигналами;
— E2 – способ дискретного управления:
— Е2=0 – трехпроводное потенциальное управление. Сигналы «ОТКРЫТЬ» и «ЗАКРЫТЬ» действуют только при их наличии;
— Е2=1 – трехпроводное импульсное управление. Наличие сигналов «ОТКРЫТЬ» или «ЗАКРЫТЬ» запоминается и действует до появления сигнала включения в противоположном направлении. При появлении сигнала включения в противоположном направлении выходной орган ЭП останавливается, дальнейшее направление движения определяется следующим после останова выходного органа сигналом управления. По умолчанию длительность импульса должна быть не менее 20 ms;
— Е2=2 – четырехпроводное импульсное управление. Наличие сигналов «ОТКРЫТЬ», «ЗАКРЫТЬ» или «СТОП» запоминается и действует до появления следующего сигнала;
— Е2=3 – двухпроводное потенциальное управление. Действует только сигнал «ОТКРЫТЬ»: при его наличии ЭП открывает арматуру, при отсутствии – закрывает ее;
— E3 – действие при наличии двух сигналов управления одновременно:
— Е3=0 – при наличии двух сигналов, ЭП останавливается (стоп);
— Е3=1 – действует старый сигнал (тот, который поступил ранее);
— Е3=2 – действует новый сигнал (тот, который поступил позже);
— E4 – способ управления кнопками ПМУ:
— Е4=0 – потенциальное (без фиксации);
— Е4=1 – импульсное (с фиксацией) .
2.4.4.4 Управление от пульта настройки Источник управления пульт настройки (далее – ПН) активен при использовании программы «Эмулятор пульта настройки» (далее – ЭПН) на коммуникаторе подключенном по беспроводному интерфейсу Bluetooth. Источник управления ПН разрешен всегда, становится активным после выдачи команд управления:»Пуск/Закрыть», «Пуск/Открыть», «Пуск/Стоп», «Контрол/Задание». Во время действия команд источники управления с более низким приоритетом недоступны для управления. Пассивным источник управления ПН может стать после выдачи команды «Пуск/Сброс», при активизации более приоритетного источника управления, изменении положения переключателя режимов управления или после перезапуска процессора контроллера .
Описание меню ЭПН при работе с контроллером приведено в приложении Е .
2.4.4.5 Сетевое местное и дистанционное командное управление При сетевом местном и дистанционном командном управлении команды на контроллер поступают по интерфейсу RS-485 по протоколу Modbus (приложение Л) .
Сетевое командное управление активизируется при поступлении команд («Открыть», «Закрыть», «Стоп», «Задать положение», «Задать скорость»). После команды «Нет» данный вид управления становится пассивным .
Параметр G1 разрешает данный вид управления .
Параметры G2-G4 задают зону пропорциональности, зону нечувствительности и период включения для данного источника при управлении по положению .
Сетевое местное управление может использоваться как управление от специальных сетевых средств местного управления, например, от блока ручного управления БРУ-42И. Сетевое дистанционное управление используется как дистанционное управление от контроллера АСУТП .
Местное управление отличается кодами команд и имеет более высокий приоритет по сравнению с дистанционным управлением. При местном управлении запрещается стартстопное движение, а также оно может быть запрещено или разрешено командами «Запретить ИМУ», «Разрешить ИМУ» .
Команды местного сетевого управления представлены в таблице 15. Команды дистанционного сетевого управления представлены в таблице 16 .
ЯЛБИ.421413.006 РЭ Команды сетевого управления записываются в регистр MODBUS 0xC001. Код команды передается в старшем байте .
Для команды «Задать положение (0…100)» значение положения в процентах (0-100) указывается в младшем байте кода команды .
Для команды «Задать скорость (-100…+100)» значение скорости в процентах от минус 100 до плюс 100 указывается в младшем байте кода команды .
Для команды «Задать положение (0…1000)», значение положения в промилле должно быть записано в регистр данных по адресу 0xC000 до записи кода команды в регистр 0xC001 .
Для команды «Задать скорость (-1000…+1000)» значение скорости в промилле от минус 1000 до плюс 1000 должно быть записано в регистр данных по адресу 0xC000 до записи кода команды в регистр 0xC001 .
Для данного вида управления чтением соответствующих регистров можно проконтролировать выданную команду, активность аналогового и дискретного управления, требование дискретного управления, значение задаваемого сигнала при аналоговом управлении, наличие сетевого командного сигнала «Авария» .
При сетевом командном управлении контроллер может получать в качестве задания требуемую среднюю скорость движения и старт-стопным способом выполнять управление двигателем ЭП. Для этого в контроллере реализованы алгоритмы импульсного управления, применяемые в устройствах верхнего уровня: IMP – Импульсатор (Н1=0) и Impout – Импульсное управление (Н1=1). Этот способ управления может быть использован совместно с импульсным регулятором, реализованным в устройстве верхнего уровня. Описание алгоритмов приведено в приложении М .
Настройки управления по скорости определяются параметрами группы H .
2.4.4.6 Позиционер (управление входным аналоговым сигналом «ЗАДАНИЕ ПОЛОЖЕНИЯ») При работе контроллер устанавливает выходной орган ЭП в положение заданное входным аналоговым сигналом «ЗАДАНИЕ ПОЛОЖЕНИЯ» .
В качестве сигнала «ЗАДАНИЕ ПОЛОЖЕНИЯ» используется аналоговый сигнал постоянного тока в диапазоне (4-20) mА .
Алгоритм работы позиционера представлен на рисунке 13 .
ЯЛБИ.421413.006 РЭ Движение выходного органа ЭП начинается при изменении сигнала «ЗАДАНИЕ ПОЛОЖЕНИЯ» за пределы зоны нечувствительности определяемой параметром F5. Останов ЭП происходит при достижении сигналом значения упреждения, которое определяется автоматически после каждого пуска, что позволяет адаптироваться к величине выбега выходного органа ЭП .
При движении может использоваться пропорциональное старт-стопное движение, которое позволяет уменьшать среднюю скорость при приближении к заданному значению .
Работа позиционера задается параметрами группы F:
— F1 – разрешение управления входным аналоговым сигналом. Если параметр F1=1, управление аналоговым сигналом разрешено и активно;
— F2 – инверсия сигнала управления «ЗАДАНИЕ ПОЛОЖЕНИЯ»;
— F3 – действия контроллера при потере управляющего сигнала (при значении входного сигнала вне указанного диапазона: меньше минус 10 % или больше 110 %): 0 – стоп; 1 – закрыть; 2 – открыть; 3 – пассивное состояние (снятие активности позиционера как источника управления);
— F4 – зона пропорциональности, %, определяющая начало пропорционального стартстопного движения. Если F4=0 старт-стопное движение не используется;
— F5 – зона нечувствительности, %;
— F6 – период включения пропорционального старт-стопного движения, s;
— F7 – задержка после останова, s .
Автомат повторных включений (АПВ) 2.4.4.7 АПВ предназначен для самостоятельного периодического включения контроллером двигателя ЭП с заданными частотой включений в час, коэффициентом заполнения и количеством повторов в одном, затем в другом направлении при проведении испытаний или технологического прогона ЭП с контроллером.
Активность АПВ и режим включений определяются параметрами группы L:
— L2 – частота включений в час;
— L3 – коэффициент заполнения, %;
— L4 – количество повторов. Если L4=0, контроллер выполняет включение ЭП в одном направлении до срабатывания концевого выключателя, затем изменяет направление включения .
АПВ имеет наименьший приоритет, поэтому для его работы не должно быть других активных источников управления и управление дискретными сигналами должно быть запрещено (параметр E1=0) .
Первое включение после активизации источника управления выполняется в направлении открытия .
2.4.4.8 Кнопки панели местного управления (ПМУ) Действие кнопок ПМУ в режиме дистанционного управления при выводе информации на цифровой индикатор представлено в таблице 17 .
2.4.5 Режим «останов/настройка». Просмотр кодов неисправности 2.4.5.1 Режим предназначен для настройки (по 2.3) и просмотра неисправности и предупреждений при работе контроллера и ЭП. Управление ЭП отключено .
С помощью кнопок ПМУ на цифровой индикатор выводится содержимое регистров общего кода неисправности, аппаратной неисправности, электроконтроля, предупреждений, а также информация о чередовании фаз напряжения питания (таблица18) .
2.4.5.2 После включения питания контроллера на цифровой индикатор в течение 2 s выводится последний зарегистрированный в энергонезависимой памяти код неисправности в виде. В случае неисправности внешней ППЗУ в течение 4 s после включения питания на цифровой индикатор выводится сообщение .
2.4.5.3 Коды и наименования неисправностей и предупреждений приведены в таблицах 19-22 .
ЯЛБИ.421413.006 РЭ ЯЛБИ.421413.006 РЭ
ЯЛБИ.421413.006 РЭ 3 Техническое обслуживание
3.1 Техническое обслуживание контроллера проводить совместно с техническим обслуживанием ЭП .
3.2 Во время профилактических осмотров необходимо проверить:
— состояние наружных поверхностей контроллера и ЭП, при необходимости очистить от грязи и пыли;
— состояние заземления: заземляющие зажимы должны быть затянуты и не покрыты ржавчиной;
— целостность корпуса контроллера и ЭП, крышек, вводных устройств, отсутствие вмятин, коррозии и других повреждений;
— наличие всех элементов крепления, крепежные болты и гайки должны быть равномерно затянуты;
— проверить целостность кабелей, подключенных к контроллеру .
3.3 При обнаружении дефектов принять меры по их устранению .
3.4 Очистку контроллера от пыли проводить путем протирания доступных частей, а также путем продувки сухим и чистым сжатым воздухом остальных его частей .
3.5 Замена батарей автономного питания Замена (установка) батарей требуется, если в рабочем режиме периодически появляется индикация (Low battery) на цифровом индикаторе .
Для замены (установки) батареи отключить питание ЭП. Вывинтить четыре винта М8 крепления лицевой панели к корпусу контроллера (рекомендуется использовать угловой шестигранный ключ 6,0 mm с шаровидным концом) и осторожно снять лицевую панель (лицевая панель закреплена специальным тросиком). Батарейный отсек располагается на внутренней стороне лицевой панели. Ослабив винты, сместить планку (рисунок 14). Заменить батареи (3 шт.) в соответствии с указанной полярностью. Установить планку на место, затянуть винты .
Присоединить лицевую панель к корпусу контроллера .
П р и м е ч а н и е – В нормальных условиях интервал замены батареи не должен превышать 2 года. Окружающая температура и условия эксплуатации ЭП могут влиять на срок службы батареи .
4.1 Во время гарантийного срока текущий ремонт производит предприятие-изготовитель .
По истечении гарантийного срока текущий ремонт проводится предприятием-изготовителем или специализированными организациями .
5 Транспортирование и хранение Транспортирование и хранение контроллеров осуществляется в соответствии с руководством по эксплуатации ЭП .
а) с электрическим подключением «2» б) с электрическим подключением «1»
а) с электрическим подключением «2» б) с электрическим подключением «1»
Для прямоходных механизмов МЭПК с кривошипным механизмом .
2) Код в шестнадцатеричном формате, в диапазоне 0-65536 (0x0000-0xFFFF) .
* Код, отличный от кода исправного датчика, его значение зависит от того, какой именно магнит неисправен .
П р и м е ч а н и е – Многооборотный датчик положения имеет в своем составе 5 микросхем. Код на индикатор выводится в шестнадцатеричном виде. Для контроля состояния нужно перевести его в восьмеричный код микросхем. Информация по каждой из них располагается в триадах кода слева направо. Для полностью исправного датчика во всех триадах должны присутствовать биты 04 (код 0х4924) .
ЯЛБИ.421413.006 РЭ
Таблица В.5 – Значение битов кода состояния для многооборотного датчика положения типа 1, типа 3 и типа 4 Код Значение слабое магнитное поле (магнит расположен близко) 0х1 сильное магнитное поле (магнит расположен далеко) 0х2 данные готовы (сенсор датчика исправен) 0х4 обрыв (по интерфейсу получен код 0xFFFF) 0х8 П р и м е ч а н и е – Многооборотный датчик положения типа 3имеет в своем составе 3 сенсора. Многооборотный датчик положения типа 1 или 4 имеет в своем составе 4 сенсора .
Информация по каждому из них располагается в тетрадах кода слева направо. Для полностью исправного трехколесного датчика в трех тетрадах должны присутствовать биты 0x4 (код 0x4440). Для полностью исправного четырехколесного датчика в четырех тетрадах должны присутствовать биты 0x4 (код 0x4444). Неисправностью считается отсутствие этих битов.
Например, у первого сенсора трехколесного датчика магнит расположен близко:
0x6440, при этом датчик считается исправным .
* Код, отличный от кода исправного датчика, его значение зависит от того, какой именно магнит неисправен .
П р и м е ч а н и е – Многооборотный датчик положения имеет в своем составе 5 микросхем. Код на индикатор выводится в шестнадцатеричном виде. Для контроля состояния нужно перевести его в восьмеричный код микросхем. Информация по каждой из них располагается в триадах кода слева направо. Для полностью исправного датчика во всех триадах должны присутствовать биты 04 (код 0х4924) .
ЯЛБИ.421413.006 РЭ ЯЛБИ.421413.006 РЭ ЯЛБИ.421413.006 РЭ Программа «Конфигуратор» предназначена для настройки датчиков, параметров, каналов ввода/ вывода и управления контроллером. В настоящем РЭ представлены две версии программы «Конфигуратор» – для работы на компьютере и для работы на коммуникаторе (контроллеры с опцией «Bluetooth») .
Д.1 Программа «Конфигуратор» для работы на компьютере
Рисунок Д.1 – Подключение контроллера к компьютеру через сервисный разъем Д.1.2 После первого запуска программы нужно проверить и/или настроить параметры соединения, выбрав в пункте меню «Соединение/Параметры»:
— тип соединения «Прямое подключение к модулю»;
— детали соединения: «Порт: СОМ1» (или другой, к которому подключен контроллер), «Скорость: 19200» бод, «Стоп-бит: 1», «9-й бит: Нет»;
— «Один подчиненный на линии», если к компьютеру подключен один контроллер .
Выбрать «Соединение/Установить» и нажать кнопку «Обновить»:
В таблице слева должна появиться строка: «nnn КИМ2(КIМ23)», где nnn – сетевой адрес устройства, при поставке nnn=239. Выбрать эту строку. Должно появиться окно с закладками:
«Коммуникации», «Параметры», «Управление», «Состояние», «Датчики», «Многооборотный датчик положения», «Статистика», «DI», «DO», «MDO», «АI», «АO» .
Д.1.3 В закладке «Коммуникации» задаются параметры связи по интерфейсу и адрес контроллера .
Д.1.4 Закладка «Параметры» используется для изменения параметров настройки контроллера (приложение Г). При выборе параметра в списке слева, – справа появляется форма, содержащая описание параметра и позволяющая изменить его значение. После нажатия кнопки «Изменить» новое значение параметра сохраняется в энергонезависимой памяти контроллера .
Кнопки «Сохранить» и «Загрузить» предназначены для сохранения параметров настройки в файле на компьютере и загрузки параметров из ранее сохраненного файла. Файл имеЯЛБИ.421413.006 РЭ ет текстовый формат и состоит из двух частей: первая часть предназначена для визуального контроля параметров, вторая часть предназначена для хранения и загрузки параметров в контроллер, она не должна изменяться текстовыми редакторами – в случае внесения в неё изменений параметры загружаться не будут .
Д.1.5 В закладке «Управление» контролируется состояние ЭП и арматуры, а также выполняется сетевое дистанционное командное управление .
Активными (управляемыми) являются элементы в рамке «Сетевое командное управление». Они позволяют выбрать команду и выдать ее контроллеру, а также задать требуемое положение для сетевого позиционера (команда «Задать положение») или задать скорость перемещения выходного органа ЭП (команда «Задать скорость»). Остальные элементы на этой закладке являются информационными (неуправляемыми) .
ЯЛБИ.421413.006 РЭ
Д.1.6 В закладке «Состояние» более подробно выведены параметры состояния контроллера. Пункт «коррекция» позволяет откорректировать показания датчика температуры процессора, которые могут отличаться для различных экземпляров процессора на величину до 45 °С .
Д.1.7 В закладке «Датчики» выполняется настройка датчиков положения и момента ЭП, а также управление двигателем ЭП для достижения крайних положений выходного органа ЭП .
ВНИМАНИЕ: ПРИ НАСТРОЙКЕ ДАТЧИКОВ ЗАЩИТНОЕ ВЫКЛЮЧЕНИЕ
ЭЛЕКТРОДВИГАТЕЛЯ НЕ ВЫПОЛНЯЕТСЯ. ПРИ ПРИБЛИЖЕНИИ К КРАЙНИМ
ТОЧКАМ СЛЕДУЕТ ПОЛЬЗОВАТЬСЯ РУЧНЫМ ПРИВОДОМ .
Также на этой закладке можно посмотреть дополнительную информацию о датчиках положения и момента и код датчика температуры ЭД. При использовании контроллера в приводе с кривошипно-шатунным механизмом нужно фиксировать код датчика, соответствующий верхней мертвой точке кривошипно-шатунного механизма. При этом можно указать одну из трех точек: верхнюю мертвую точку (ВМТ), точку среднего хода (ТСХ), отстоящую от ВМТ на 90, нижнюю мертвую точку (НМТ), отстоящую от ВМТ на 180 .
Кнопки «Сохранить», «Загрузить» предназначены для сохранения данных настройки в файл на компьютере, и впоследствии их можно загрузить, не повторяя настройку. При этом файл параметров настройки датчиков защищается паролем .
ЯЛБИ.421413.006 РЭ Д.1.8 В закладке «Многооборотный датчик положения» контролируется состояние многооборотного датчика положения, а также выполняется его тарирование и настройка .
ЯЛБИ.421413.006 РЭ Д.1.9 В закладке «Шестеренчатый датчик положения» контролируется состояние шестеренчатого датчика положения, а также выполняется его тарирование и настройка .
Д.1.10 В закладке «Статистика» контролируются и сохраняются в виде файла статистические данные архива .
ЯЛБИ.421413.006 РЭ Д.1.11 Закладки «DI», «DO», «MDO»,»АI», «АO» предназначены для проверки, настройки дискретных и аналоговых входов и выходов .
Д.2 Программа «Конфигуратор» для работы на коммуникаторе (КПК) с операционной системой Android Д.2.1 Подключение контроллера к КПК с установленной программой «Конфигуратор» осуществляется по интерфейсу Bluetooth .
Д.2.2 После запуска программы «Конфигуратор» необходимо подтвердить разрешение на включение интерфейса Bluetooth на коммуникаторе и соединиться с контроллером, выбрав «Соединиться с устройством» .
После этого будет предложено выбрать устройство для подключения:
Если известен адрес устройства (формат адреса ХХ:ХХ:ХХ:ХХ:ХХ:ХХ), с которым необходимо соединиться, то нажать кнопку «Ввести Bluetooth адрес устройства». Откроется меню ручного ввода адреса устройства. В поле слева нужно ввести адрес в шестнадцатеричном формате, разделяя каждый байт двоеточием. После нажатия кнопки «Применить» начнется процесс соединения КПК с контроллером. Если сопряжение с данным устройством до этого не производилось, то программа произведет его автоматически в процессе соединения .
Если адрес устройства не известен – нажать на кнопку «Поиск устройств» .
Появится список доступных устройств (контроллеров). Из предложенных устройств выбрать необходимый контроллер «KIM23-mmmmm-nnn», где mmmmm – номер группы, nnn – сетевой адрес устройства, при поставке nnn=239. Если устройство до этого не было сопряжено, то сопряжение произойдет автоматически .
ЯЛБИ.421413.006 РЭ
Д.2.3 Также можно произвести поиск и сопряжение КПК с устройством в меню «Настройки» в операционной системе Android, выбрав «Bleutooth». При вхождении в меню «Bleutooth» поиск должен начаться автоматически либо после нажатия кнопки «Поиск устройств» .
После появления списка доступных для сопряжения устройств выбрать необходимое устройство и начнется процедура сопряжения .
При запуске программы «Конфигуратор» устройство, с которым производилось сопряжение, уже будет находиться в списке в меню соединения. Для дальнейшего соединения необходимо выбрать данное устройство .
Для исключения устройств из списка сопряженных необходимо отменить сопряжения, нажав кнопку » » справа от названия сопряженного устройства, либо из меню «Настройки» в операционной системе Android .
ЯЛБИ.421413.006 РЭ При большом количестве сопряженных устройств после нажатия кнопки «Поиск устройств» будут подсвечены и выведены на верхние позиции те устройства, которые на данный момент доступны для подключения .
Д.2.4 После подключения контроллера с КПК должно появиться окно с закладками «Управление», «Состояние», «Коммуникации», «DI», «DO», «МDO»,»AI», «AO», «Датчики», «Параметры», «Статистика» .
При неудачной попытке подключения меню подключения появиться кнопка «Повторить попытку соединения», позволяющая повторить попытку соединения .
Если при нахождении в основном меню настройки «Конфигуратора» возникла необходимость подключиться к другому контроллеру, то для этого нужно нажать кнопку «Назад» в нижний части экрана и дождаться вывода сообщения «Соединение с устройством потеряно» .
Повторить все вышеописанные действия для процедуры подключения КПК к контроллеру .
Если при работе программы «Конфигуратор» параллельно открыто достаточно большое количество других приложений, то во время переключения от программы «Конфигуратор» на другое приложение операционная система Android при нехватке ресурсов КПК может уничтожить программу «Конфигуратор», тем самым принудительно освободив дополнительные ресурсы для открытого на текущий момент приложения. В этом случае при обратном возврате в программу «Конфигуратор» автоматически откроется меню восстановления программы «Конфигуратор» после уничтожения. Программа «Конфигуратор» попытается восстановить соединение .
Если восстановление соединения будет проведено успешно, то программа снова войдет в основное меню для контроллера .
ЯЛБИ.421413.006 РЭ
Д.2.5 Закладка «Управление» позволяет выполнять сетевое командное управление в меню «Команда». Также можно отслеживать текущие выполняемые команды («Действующие команды управления»), контролировать состояние ЭП и арматуры («Состояние управления», «Сигналы состояния») .
ЯЛБИ.421413.006 РЭ Д.2.6 Закладка «Состояние» позволяет отслеживать текущие неисправности и параметры состояния контроллера .
Д.2.7 Закладка «Коммуникации» позволяет задавать параметры связи между КПК и контроллером, следить за состоянием параметров связи. Параметры связи между КПК и контроллером пропущены. Их можно задать с помощью программы «Конфигуратора» для компьютера .
При изменении параметров «Номер группы», «Сетевой адрес» контроллер будет перезапущен, соединение по интерфейсу Bluetooth будет разорвано. Необходимо подождать некоторое время пока программа восстановит Bluetooth соединение .
ЯЛБИ.421413.006 РЭ Д.2.8 Закладки «DI», «DO» предназначены для проверки, настройки дискретных входов и выходов .
ЯЛБИ.421413.006 РЭ Ячейки в меню «Состояние выходов» в режимах «Работа» и «Сигналы» выполняют только функцию индикации. При переходе в режим «Проверка» данные ячейки становятся интерактивными. Каждое нажатие на одну из ячеек сразу изменяет ее состояние в контроллере .
Д.2.9 Закладка «MDO» предназначена для проверки, настройки многофункциональных дискретных выходов «М3», «М4» .
ЯЛБИ.421413.006 РЭ Ячейки в меню «Состояние выходов» в режимах «Работа» и «Сигналы» выполняют только функцию индикации. При переходе в режим «Проверка» данные ячейки становятся интерактивными. Каждое нажатие на одну из ячеек сразу изменяет ее состояние в контроллере .
Д.2.10 Закладки «AI», «AO» предназначены для проверки, настройки аналоговых входа и выхода .
ЯЛБИ.421413.006 РЭ Д.2.11 В закладке «Датчики» выполняется настройка датчиков положения и момента ЭП, отображение их текущего состояния, а также управление двигателем ЭП для достижения крайних положений выходного органа ЭП .
При настройке датчиков программа автоматически определяет тип датчика (однооборотный, многооборотный, шестеренчатый датчик положения). В зависимости от типа датчика положения будет отображено меню «Тарирование» (для многооборотного и шестеренчатого датчика) .
Кнопки «Прикрепить», «Фиксировать», «Фикс» для настройки датчиков положения и момента доступны при переключении в режим «Калибровка» .
ВНИМАНИЕ: ПРИ НАСТРОЙКЕ ДАТЧИКОВ ЗАЩИТНОЕ ВЫКЛЮЧЕНИЕ
ЭЛЕКТРОДВИГАТЕЛЯ НЕ ВЫПОЛНЯЕТСЯ. ПРИ ПРИБЛИЖЕНИИ К КРАЙНИМ
ТОЧКАМ СЛЕДУЕТ ПОЛЬЗОВАТЬСЯ РУЧНЫМ ПРИВОДОМ !
ЯЛБИ.421413.006 РЭ
Д.2.12 Закладка «Параметры» позволяет изменить параметры настройки контроллера (приложение Г) .
При выборе параметра в списке – появляется форма, содержащая описание параметра и позволяющая изменить его значение. После нажатия кнопки «Изменить» новое значение параметра сохраняется в энергонезависимой памяти контроллера .
Д.2.13 В закладке «Статистика» отображаются статистические данные архива .
Меню контроллера выводится на дисплей в программе «Эмулятор пульта настройки» и имеет следующую древовидную структуру:
«Пуск» – дискретное управление движением. При выполнении действий по пунктам меню 1.1 – 1.3 пульт настройки становится активным .
1.2 «Закрыть» – включить ЭД в направлении «закрыть» .
1.3 «Открыть» – включить ЭД в направлении «открыть» .
1.4 «Сброс» – остановить ЭД и сбросить признаки ошибок (защитного отключения), активности пульта настройки и сетевого командного управления (местного и дистанционного) .
2.1 «Ток_A» — «Дейст.знач фазыA» – индикация действующего значения тока фазы A .
2.2 «Ток_B» — «Дейст.знач фазыB» – индикация действующего значения тока фазы B .
2.3 «Макс_A» — «Макс.знач.тока A» – индикация максимального значения тока фазы A после последнего включения ЭД .
2.4 «Макс_B» — «Макс.знач.тока B» – индикация максимального значения тока фазы B после последнего включения ЭД .
2.5 «ЧерФаз» — «чередование фаз» – «неизвестно» (при однофазном подключении), «ABC», «ACB» ( чередование фаз при трехфазном подключении) .
2.6 «КодФаз» — «Код чередов. фаз» – код чередования фаз .
3 «Контрол» – аналоговое управление и контроль состояния. При выполнении действия по пункту меню 3.1 пульт настройки становится активным .
3.1 «Задание». «Задать полож%» – задать уставку положения и активизировать аналоговое управление с пульта настройки. Действует параметр G3 «зона нечувствительности» тот же, что и для сетевого командного управления .
3.2 «Положен». «Положение в %» – посмотреть положение выходного органа ЭП, % .
3.3 «Момент». «Момент в %» – посмотреть значение момента, % .
3.4 «АктУпр». «Активные ист.упр» – двоичный код активных источников управления, далее расшифровка – значение первого единичного бита справа – действующего источника управления:
3.4.9 «авт.повт.вкл.АПВ» – автомат повторных включений .
3.5 «КодСост». «Код состояния» – основной двоичный код состояния контроллера, далее расшифровка:
3.5.2 «готовность к дистанц. управлению»;
3.5.5 «неисправность» 3.6 «Сигналы». «Вирт. сигналы» двоичный код состояния виртуальных сигналов .
ЯЛБИ.421413.006 РЭ 3.7 «Темпера». «Температура гр.C» – температура процессора, С. Для различных экземпляров процессоров показания датчика могут различаться до 45 С .
3.8 «КорТемп». «Коррек.температ.» – коррекция температуры. Ввод действительного значения температуры для коррекции показаний датчика .
4 «Исправ» – посмотреть коды неисправности контроллера .
4.1 «Общая». «Общий код ошибки» – посмотреть общий (основной) код неисправности:
4.1.2 «неисправность аппаратуры»;
4.1.4 «превышен.допуст. значения момента»;
4.1.8 «превышено максим. время включения»;
4.1.9 «требуется калибр. датчика положен.»;
4.1.10 «требуется калибр. датчика момента»;
4.1.11 «треб.тарирование датчика положен.»;
4.2 «Электро». «Электроконтроль » – посмотреть код неисправности при контроле электрических параметров:
4.2.6 «предельная перегрузка»;
4.2.11 «чередование фаз» – переменное чередование фаз (плохой контакт в цепях питания) .
4.3 «Фаза_A». «Неиспр. фазы A» – посмотреть код неисправности при контроле электрических параметров фазы A:
4.4 «Фаза_B». «Неиспр. фазы B» – посмотреть код неисправности при контроле электрических параметров фазы B:
4.5 «Аппарат». «Аппаратная» – посмотреть код неисправности аппаратуры:
4.5.5 «неисправен датчик положения»;
4.5.6 «неисправен датчик момента»;
ЯЛБИ.421413.006 РЭ 4.5.7 «неисправ.датчик температ.двигат.» .
4.6 «Предупр». «Предупреждения» – посмотреть код предупреждений:
4.6.4 «потеря сигнала задания»;
4.6.5 «запрет источников местного управ.»;
5 «Информ». Посмотреть дополнительную информацию о состоянии оборудования .
5.1 «ДатПол». «Датчик положения» – посмотреть дополнительную информацию о датчике положения .
5.2 «ДатМом». «Датчик момента» – посмотреть дополнительную информацию о датчике момента .
5.3 «Рестарт» – посмотреть причину пуска контроллера:
5.3.1 «Причина старта: неизвестно»;
5.3.2 «Причина старта: сигнал RESET»;
5.3.3 «Причина старта: включение питан.»;
5.3.4 «Причина старта: программ. сброс»;
5.3.5 «Причина старта: I watchdog»;
5.3.6 «Причина старта: W watchdog»;
5.3.7 «Причина старта: провал питания» .
5.4 «СилКомм» — силовой коммутатор:
5.4.1 «Силовой коммутатор: неизвестно»;
5.4.2 «Силовой коммутатор: 20 ампер»;
5.4.3 «Силовой коммутатор: 4 ампера» .
6 «Аппарат» – действия с аппаратными ячейками ввода-вывода .
6.1 «ДисВвод» – настройки каналов дискретного ввода .
6.1.1 «Каналы». «Состоян.каналов» – двоичный код состояния каналов дискретного ввода. Порядок следования битов справа налево:
4 Активизация дискретного управления (АктДУ) .
6.1.2 «T_цикла» — «Время цикла IOмс» – время цикла ввода/вывода, ms .
6.1.3 «Дребезг». «Глуб.подавл.дреб» – глубина подавления дребезга – количество следующих подряд опросов каналов дискретного ввода, при которых состояние канала должно быть одинаковым. Период опроса каналов — время цикла ввода/вывода .
6.1.4 «Маска». «Маска каналов» – двоичный код маски каналов: «1» – соответствующий бит кода состояния каналов используется, «0» – нет (справочно) .
6.1.5 «Инверс» — «————43210» – двоичный код инверсии входных сигналов, «1» в соответствующем бите означает инверсию входного сигнала. Порядок следования битов тот же, что и в пункте меню 6.1.1 «Каналы» .
6.2 «ДисВыв» – «дискретный вывод .
6.2.1 «Каналы». «Состоян.каналов» – состояние каналов дискретного вывода. В режиме «проверка» может быть изменено. Значение битов справа налево:
0 НЕИСПРАВНОСТЬ 1 ОТКРЫТО 2 ЗАКРЫТО 3 МНОГОФУНКЦИОНАЛЬНЫЙ «М1» 4 МНОГОФУНКЦИОНАЛЬНЫЙ «М2» ЯЛБИ.421413.006 РЭ 6.2.2 «Режим». «Работа», «Провер», «Сигналы» – выбор режима работы – «работа», «проверка», «сигналы» .
6.2.3 «Маска». «Маска каналов» – двоичный код маски каналов – «1» означает, что соответствующий бит кода состояния каналов используется, «0» – нет (справочно) .
6.2.4 «Инверс» — «————43210» – двоичный код инверсии выходных сигналов, «1» в соответствующем бите означает инверсию выходного сигнала. Порядок следования битов тот же, что и в пункте меню 6.1.1 «Каналы» .
6.2.5 «Мигание» — «————43—» — двоичный код мигания многофункциональных выходных сигналов, «1» в соответствующем бите означает мигание выходного сигнала. Порядок следования битов тот же, что и в пункте меню 6.1.1 «Каналы» .
6.2.6 «МФДВых1» — «Мн.фун.дис.вых.1» — настройка функции дискретного многофункционального выхода «M1»:
6.2.6.1. «селектор в полож. МЕСТНОЕ/ОСТАНОВ» (по умолчанию);
6.2.6.2. «селектор в полож. ДИСТАНЦИОННОЕ»;
6.2.6.3. «селектор в полож. МЕСТНОЕ»;
6.2.6.4. «селектор в полож. ОСТАНОВ»;
6.2.6.8. «остановлено в середине»;
6.2.6.9. «перегрузка по моменту»;
6.2.6.15. «отсутствие движения»;
6.2.6.16. «потеря сигнала задания»;
6.2.6.17. «аппаратная неисправность»;
6.2.6.18. «есть предупреждения»;
6.2.7 «МФДВых2» — «Мн.фун.дис.вых.2» — настройка функции дискретного многофункционального выхода «M2»:
6.2.7.1. «селектор в полож. МЕСТНОЕ/ОСТАНОВ»;
6.2.7.2. «селектор в полож. ДИСТАНЦИОННОЕ»;
6.2.7.3. «селектор в полож. МЕСТНОЕ»;
6.2.7.4. «селектор в полож. ОСТАНОВ»;
6.2.7.8. «остановлено в середине»;
6.2.7.9. «перегрузка по моменту» (по умолчанию);
6.2.7.15. «отсутствие движения»;
6.2.7.16. «потеря сигнала задания»;
6.2.7.17. «аппаратная неисправность»;
6.2.7.18. «есть предупреждения»;
ЯЛБИ.421413.006 РЭ 6.2.7.19. КВЗ;
6.3 «МнФунДВ» — многофункциональные дискретные выходы «М3», «М4» (опция «Выходы «М3», «М4») .
6.3.1 «Разреш» — «Блок разрешен» — разрешение/запрет работы многофункциональных дискретных выходов «М3», «М4» .
6.3.2 «Каналы». «Состоян.каналов» – состояние каналов многофункционального дискретного вывода. В режиме «проверка» может быть изменено. Значение битов справа налево:
6.3.3 «Режим». «Работа», «Провер» – выбор режима работы: «работа», «проверка» .
6.3.4 «Маска». «Маска каналов» — двоичный код маски каналов – «1» означает, что соответствующий бит кода состояния каналов используется, «0» — нет .
6.3.5 «Инверс» — «—————10» – двоичный код инверсии входных сигналов, «1» в соответствующем бите означает инверсию входного сигнала. Порядок следования битов тот же, что и в пункте меню 6.3.2 «Каналы» .
6.3.6 «Мигание» — «—————10» – двоичный код мигания многофункциональных выходных сигналов, «1» в соответствующем бите означает мигание выходного сигнала. Порядок следования битов тот же, что и в пункте меню 6.3.2 «Каналы» .
6.3.7 «МФДВых3» – «Мн.фун.дис.вых.3» — настройка функции многофункционального дискретного выхода «M3»:
6.3.7.4. «селектор в полож. ДИСТАНЦИОННОЕ»;
6.3.7.5. «селектор в полож. МЕСТНОЕ»;
6.3.7.6. «селектор в полож. ОСТАНОВ»;
6.3.7.10. «остановлено в середине»;
6.3.7.11. «перегрузка по моменту»;
6.3.7.17. «отсутствие движения»;
6.3.7.18. «потеря сигнала задания»;
6.3.7.19. «аппаратная неисправность» .
6.3.8 «МФДВых4» — «Мн.фун.дис.вых.4» — настройка функции многофункционального дискретного выхода «M4»:
6.3.8.4. «селектор в полож. ДИСТАНЦИОННОЕ»;
6.3.8.5. «селектор в полож. МЕСТНОЕ»;
6.3.8.6. «селектор в полож. ОСТАНОВ»;
7.14.2.2.2.1. «неверный пароль не сохранено» .
7.14.2.2.2.2. «ошибка конт.сум. завод настр.:НЕТ» .
7.14.2.2.2.3. «выполнено завод настр.:ДА» 7.15 «Исходн». «Исходн.параметры ENTER-да ESC-нет». Установить исходные значения параметров .
8 «Датчики» – настройка датчиков положения и момента .
8.1 «Разреш» — «Разреш.калибров» – разрешить режим настройки датчиков. В этом режиме не действуют концевые и моментные выключатели. При приближении к крайним положениям следует пользоваться ручным приводом .
8.2 «Пуск» — «Стоп», «Открыть», «Закрыть», «Сброс», «ЗапрЗащ» – управление ЭД и запрет защитного отключения при выполнении настройки датчиков .
8.3 «Положен» – настроить датчик положения .
8.3.1 » КодДат». «Код датчика» – смотреть код датчика положения .
8.3.2 «Реверс». «Реверс датчика» – код датчика будет увеличиваться при перемещении в другом направлении (параметр B1) .
8.3.3 «Диапаз». «Диапазон датчика» – рабочий диапазон датчика – доля в процентах полного диапазона датчика. Используется при калибровке двух точек одновременно (параметр B2) .
8.3.4 «Креп0». «Прикрепить к 0%» – точка 0 % фиксируется по месту, точка 100 % определяется по диапазону датчика .
8.3.5 «Креп100». «Прикрепить 100%» – точка 100 % фиксируется по месту, точка 0 % определяется по диапазону датчика .
8.3.6 «Фикс0». «Фиксировать 0%» – фиксируется код, соответствующий положению 0 % .
8.3.7 «Фикс100». «Фиксировать 100%» — фиксируется код, соответствующий положению 100 % .
8.3.8 «КриВМТ». «Код ВМТкривошипа». «Код датчика». «Сохранить ENTER-да ESC-нет». Зафиксировать код датчика, соответствующий верхней мертвой точке кривошипа (ВМТ) привода МЭПК, указывая верхнюю мертвую точку (ВМТ) кривошипа .
8.3.9 «КриТСХ». «Код ТСХкривошипа». «Код датчика». «Сохранить ENTER-да ESC-нет». Зафиксировать код датчика, соответствующий верхней мертвой точке кривошипа (ВМТ) привода МЭПК, указывая точку среднего хода (ТСХ) кривошипа .
8.3.10 «КриНМТ». «Код НМТкривошипа». «Код датчика». «Сохранить ENTERда ESC-нет». Зафиксировать код датчика, соответствующий верхней мертвой точке кривошипа (ВМТ) привода МЭПК, указывая нижнюю мертвую точку (НМТ) кривошипа .
8.4 «МнОбор» – «Тарировать датч.ENTER-да ESC-нет» – «Начало», «Конец» – начать или закончить тарирование многооборотного датчика положения .
8.5 «Момент» – настроить датчик момента .
8.5.1 «КодДат». «Код датчика» – смотреть код датчика момента .
8.5.2 «Реверс». «Реверс датчика» – код датчика будет увеличиваться при перемещении в другом направлении (параметр B4) .
8.5.3 «Фикс0». «Код момента 0%» – смотреть текущее значение кода момента 0 % .
«Код датчика» — смотреть измеряемый код датчика. «Сохранить? ENTER-да ESCнет» фиксировать код, соответствующий моменту 0 % или отказаться .
8.5.4 «КодМин+» — нижняя (промежуточная) точка положительной ветви графика характеристики датчика момента. «Мин.точка плюс» — смотреть текущее сохраненное значение кода данной точки. «Код датчика» — смотреть измеряемый код датчика. «Сохранить? ENTER-да ESC-нет» — фиксировать код, соответствующий данной точке характеристики или отказаться .
ЯЛБИ.421413.006 РЭ 8.5.5 «ВелМин+». «МинВел% Мом. Плюс» — величина момента в процентах, для предыдущей точки (параметр B7) .
8.5.6 «КодМак+» — верхняя (крайняя) точка положительной ветви графика характеристики датчика момента. «Макс.точка плюс» — смотреть текущее сохранённое значение кода данной точки. «Код датчика» — смотреть измеряемый код датчика. «Сохранить? ENTER-да ESC-нет» — фиксировать код, соответствующий данной точке характеристики или отказаться .
8.5.7 «ВелМак+». «МаксВел%Мом. Плюс» — величина момента в процентах, для предыдущей точки (параметр B8) .
8.5.8 «КодМин-» — меньшая (промежуточная) точка отрицательной ветви графика характеристики датчика момента. «Мин.точка минус» — смотреть текущее сохранённое значение кода данной точки. «Код датчика» — смотреть измеряемый код датчика. «Сохранить? ENTER-да ESC-нет» — фиксировать код, соответствующий данной точке характеристики или отказаться .
8.5.9 «ВелМин-«. «МинВел% МомМинус — величина момента в процентах, для предыдущей точки (параметр B5) .
8.5.10 «КодМак-» — большая (крайняя) точка отрицательной ветви графика характеристики датчика момента. «Макс.точка минус» — смотреть текущее сохранённое значение кода данной точки. «Код датчика» — смотреть измеряемый код датчика. «Сохранить? ENTER-да ESC-нет» — фиксировать код, соответствующий данной точке характеристики или отказаться .
8.5.11 «ВелМак-«. «МаксВел%МомМинус» — величина момента в процентах, для предыдущей точки (параметр B6) .
8.5.12 «Сброс». «Установ.исх.код ENTER-да ESC-нет». Установить исходные значения кодов калибровки датчика момента .
9 «Связь». Параметры настройки каналов связи .
9.1 «Адрес». «Сетевой адрес» – адрес контроллера в сети Modbus. Может принимать значения от 1 до 239 .
9.2 «Порт1» – настройки для порта связи 1 .
9.2.1 «Скор.» – скорость обмена в бодах .
9.2.2 «Задача» — «Нет», «ModBus» – задача обслуживания порта .
9.3 «Порт2» – настройки для порта связи 2 .
9.3.1 «Скор.» – скорость обмена в бодах .
9.3.2 «Задача» — «Нет», «ModBus», «BlueToo» – задача обслуживания порта .
9.3.3 «Радио» — настройки радиоканала .
9.3.3.1. «Группа» — «Номер группы» — номер группы устройства для формирования идентификатора .
9.3.3.2. «Статус» — статус радиоканала:
9.3.3.2.1. «радиомодуль не используется», 9.3.3.2.2. «радиомодуль отсутствует», 9.3.3.2.3. «радиомодуль обнаружен», 9.3.3.2.4. «радиомодуль готов к работе» .
9.4 «Порт3» – настройки для порта связи 3 .
9.4.1 «Скор.» – скорость обмена в бодах .
9.4.2 «Задача» — «Нет», «ModBus» – задача обслуживания порта .
10 «Идентиф» – данные идентификации контроллера .
10.1.1 «Группа». «Группа позиции» .
10.2 «Арматур» – данные идентификации арматуры, управляемой ЭП .
10.2.1 «Группа». «Группа арматуры» .
10.2.2 «Номер». «Номер арматуры» .
10.3 «ДатаВвЭ» – дата ввода в эксплуатацию .
ЯЛБИ.421413.006 РЭ 10.3.1 «Год». «Год начала экспл» .
10.3.2 «Месяц». «Месяц начала экс» .
10.3.3 «День». «День начала эксп» .
11 «Статист» – смотреть статистические данные архива .
11.1.1 «ВрВключ» — «Вр.послед.вкл. с» — время последнего включения ЭД .
11.1.2 «ВрПолХо» — «Врем.полн.хода с» — время последнего полного хода ЭП .
11.2 «Послед» – группа последних данных .
11.2.1 «КолВкл» — «Колич.включений» — количество включений ЭД .
11.2.2 «ВрРабДв» — «Вр.работы двигат» — время работы ЭД .
11.2.3 «ПолнХод» — «Колич.полн.ходов» — количество полных ходов из положения «ОТКРЫТО» в положение «ЗАКРЫТО» и наоборот .
11.2.4 «Электро» — «Сраб.электрозащ.» — количество срабатываний защиты по электрическим параметрам .
11.2.5 «Момент» — «Сраб.по моменту » — количество срабатываний защиты по превышению момента .
11.2.6 «Перегр» — «Перегрев двигат.» — количество срабатываний защиты по перегреву ЭД .
11.2.7 «Обнулит» — «Обнулить данные?ENTER-да ESC-нет» — «Пользоват.пароль» — «неверный пароль не выполнено» или «верный пароль выполнено»
— обнулить последние накопленные данные и фиксировать новую дату начала регистрации .
11.3 «Полные» – группа полных данных (с момента полной очистки FRAM) .
11.3.1 «КолВкл» — «Колич.включений» — количество включений ЭД .
11.3.2 «ВрРабДв» — «Вр.работы двигат» — время работы ЭД .
11.3.3 «ПолнХод» — «Колич.полн.ходов» — количество полных ходов из положения «ОТКРЫТО» в положение «ЗАКРЫТО» и наоборот .
11.3.4 «Электро» — «Сраб.электрозащ.» — количество срабатываний защиты по электрическим параметрам .
11.3.5 «Момент» — «Сраб.по моменту » — количество срабатываний защиты по превышению момента .
11.3.6 «Перегр» — «Перегрев двигат.» — количество срабатываний защиты по перегреву ЭД .
12 «Омодуле». Информация о контроллере .
12.1 «ТипМод». «КИМ2 (KIM23)» – наименование прошивки .
12.2 «Произв». «ОАО АБС ЗЭиМ Автомат г.Чебоксары» .
12.3 «Версия». «Сборка: V.S.NNNN Дата: DD.MM.YYYY». Где: V.S – номер версии, NNNN — порядковый номер, а DD.MM.YYYY — дата сборки программы микропроцессора .
Состояние дискретных выходов соответствует их неактивному состоянию при включенном контроллере (выходной орган ЭП находится в среднем положении; сигнал «Неисправность» отсутствует). При отключении питания выход «Неисправность» переходит в активное состояние (контакты 9 и 10 замкнуты, контакты 10 и 11 разомкнуты) .
в) коды набора опций 08, 09 (остальное см. рисунки Ж.2а и Ж.2б)
— серым цветом выделены сигналы, являющиеся дополнительными опциями относительно базового состава (базовый состав – код набора опций 00). Наличие или отсутствие этих сигналов определяется кодом набора опций (таблица 2) .
Состояние дискретных выходов соответствует их неактивному состоянию при включенном контроллере (выходной орган ЭП находится в среднем положении; сигнал «Неисправность» отсутствует). При отключении питания выход «Неисправность» переходит в активное состояние (контакты 9 и 10 замкнуты, контакты 10 и 11 разомкнуты) .
— серым цветом выделены сигналы, являющиеся дополнительными опциями относительно базового состава (базовый состав – код набора опций 00). Наличие или отсутствие этих сигналов определяется кодом набора опций (таблица 2) .
Состояние дискретных выходов соответствует их неактивному состоянию при включенном контроллере (выходной орган ЭП находится в среднем положении; сигнал «Неисправность» отсутствует). При отключении питания выход «Неисправность» переходит в активное состояние (контакты 9 и 10 замкнуты, контакты 10 и 11 разомкнуты) .
— серым цветом выделены сигналы, являющиеся дополнительными опциями относительно базового состава (базовый состав – код набора опций 00). Наличие или отсутствие этих сигналов определяется кодом набора опций (таблица 2) .
— серым цветом выделены сигналы, являющиеся дополнительными опциями относительно базового состава (базовый состав – код набора опций 00). Наличие или отсутствие этих сигналов определяется кодом набора опций (таблица 2) .
Состояние дискретных выходов соответствует их неактивному состоянию при включенном контроллере (выходной орган ЭП находится в среднем положении; сигнал «Неисправность» отсутствует). При отключении питания выход «Неисправность» переходит в активное состояние (контакты 9 и 10 замкнуты, контакты 10 и 11 разомкнуты) .
Рисунок Ж.6 – Схема подключения питания контроллера КИМ2-220 конструктивное исполнение «1» (остальное см. рисунки Ж.1-Ж.5) ЯЛБИ.421413.006 РЭ Таблица И.5 – Назначение контактов клеммной колодки контроллера с опцией «Выходы «М3», «М4»
К.1 Заводская настройка контроллера производится на предприятии-изготовителе и выполняется в следующем объеме .
Настройка может выполняться кнопками ПМУ в режиме настройки или через компьютер с помощью программы «Конфигуратор» .
Далее описана настройка с помощью кнопок ПМУ .
К.2 Установить параметры настройки согласно руководству по эксплуатации ЭП, в который установлен контроллер .
К.3 При выводе на цифровой индикатор неисправности («Требуется тарирование датчика положения» и «Требуется калибровка датчика положения») провести тарирование многооборотного датчика положения в следующей последовательности (затем выполнить настройку по К.4) .
Уровень доступа должен быть системным. Для установки уровня доступа ввести системный пароль в пункте меню » / » .
Выбрать пункт меню » «. Нажать кнопку » » – на цифровом индикаторе должно появиться сообщение » «. Перевести переключатель режимов управления в положение «МЕСТ». Нажать и удерживать кнопку » » для включения ЭП в направлении закрытия до появления на цифровом индикаторе кода количества оборотов » «, где Х – цифра от 0 до F (в шестнадцатеричном виде). Процедура тарирования завершена .
К.4 Выполнить настройку датчика положения в следующей последовательности .
Выбрать пункты меню » «. Нажать кнопку » » – на цифровом индикаторе появится цифровой код датчика, соответствующий положению «ЗАКРЫТО». Нажать кнопку » » – на цифровом индикаторе будет мигать текущее значение кода датчика. Убедиться, что при движении из положения «ЗАКРЫТО» в положение «ОТКРЫТО» код датчика увеличивается. В противном случае изменить значение параметра B1 (0 на 1 или 1 на 0). Привести ЭП в положение «ЗАКРЫТО». Нажать кнопку » «, затем, удерживая ее, кнопку » «. На цифровом индикаторе должно появиться сообщение » » .
При необходимости уточнить положение «ОТКРЫТО», приведя ЭП в требуемое положение и выполнив пункт меню » / / » .
Настройка датчика положения для прямоходных механизмов МЭПК с кривошипным механизмом имеет некоторые особенности:
— задать параметры C2=0, B1=0, B250, а параметр B3=1 (или 2 или 3) – в соответствии с исполнением кривошипа;
— выбрать пункт меню ( или / ) (или / / / / ) и войти в режим изменения параметра. Мигающее значение кода датчика / (приведенное к процентам от полного хода датчика) должно увеличиваться при движении от ВМТ. Если оно уменьшается, нужно задать параметр B1=1 (для приводов, у которых датчик положения и кривошип вращаются в противоположные стороны мигающее значение кода датчика должно уменьшаться);
— если выбран пункт, установить выходной орган ЭП в положение ВМТ / кривошипа. Фиксировать код датчика, соответствующий положению ВМТ с помощью ПМУ ( / / );
ЯЛБИ.421413.006 РЭ
— если выбран пункт, установить выходной орган ЭП в положение ТСХ / кривошипа (положение кривошипа: ВМТ + 90 ). Фиксировать код датчика, соответствующий положению ВМТ с помощью ПМУ / / );
— если выбран пункт, установить выходной орган ЭП в положение НМТ / кривошипа (положение кривошипа: ВМТ + 180 ). Фиксировать код датчика, соответствующий положению ВМТ с помощью ПМУ / / );
— используя любой из способов управления приводом либо с помощью ручного привода, установить арматуру в положение «ОТКРЫТО» – верхняя точка диапазона (ближе к ВМТ) .
Фиксировать положение «ОТКРЫТО» (100 %) с помощью ПМУ или / / );
— используя любой из способов управления приводом либо с помощью ручного привода, установить арматуру в положение «ЗАКРЫТО» – нижняя точка диапазона (дальше от ВМТ). Фиксировать положение «ЗАКРЫТО» (0 %) с помощью ПМУ / / );
— параметром C3 (0 или1) задать правильное направление включения ЭД .
К.5 Настройка датчика момента производится на специализированном оборудовании, которое обеспечивает нормированную нагрузку на выходной орган ЭП .
Настроить параметры датчика момента (A2, В4, B5, В6, B7, В8) согласно руководству по эксплуатации ЭП, в который установлен контроллер .
Войти в раздел настройки датчика момента – » / » .
На выходном органе ЭП обеспечить отсутствие момента. Зафиксировать код датчика, выбрав пункт меню » » .
Вращать выходной орган ЭП в направлении, когда значение кода датчика момента на цифровом индикаторе уменьшается. Для просмотра кода датчика войти в режим изменения, выбрав пункт меню » » .
На выходном органе ЭП создать момент противодействия, равный минимальному значению отрицательного момента в зависимости от типа ЭП. Зафиксировать код датчика, выбрав пункт меню » » .
На выходном органе ЭП создать момент противодействия, равный максимальному значению отрицательного момента в зависимости от типа ЭП. Зафиксировать код датчика, выбрав пункт меню » » .
Вращать выходной орган ЭП в противоположном направлении .
На выходном органе ЭП создать момент противодействия, равный минимальному значению положительного момента в зависимости от типа ЭП. Зафиксировать код датчика, выбрав пункт меню » » .
На выходном органе ЭП создать момент противодействия, равный максимальному значению положительного момента в зависимости от типа ЭП. Зафиксировать код датчика, выбрав пункт меню » » .
При необходимости (см. руководство по эксплуатации на ЭП) установить реверс датчика момента, присвоив параметру B.4 значение 1 .
Таблица Л.2 – Основной код состояния (индекс регистра 0x0E) Код Значение 0x0001 Открыто 0x0002 Закрыто 0x0004 Открыто с уплотнением 0x0008 Закрыто с уплотнением 0x0010 Остановлено в середине 0x0020 Открывается 0x0040 Закрывается 0x0080 Блокировано открытие 0x0100 Блокировано закрытие 0x0200 Готовность (дистанционное управление возможно) Панель местного управления (переключатель режимов управления в положении 0x0400 «МЕСТ») 0x0800 Отключено (переключатель режимов управления в положении «0») 0x1000 Дискретный сигнал ESD («АВАРИЯ») 0x2000 Сетевой сигнал ESD («Авария») 0x4000 Есть предупреждения 0x8000 Общий признак неисправности
ЯЛБИ.421413.006 РЭ
Таблица Л.3 – Значение битов кода виртуальных сигналов (индекс регистра 0x0F) Код Значение 0x0001 Срабатывание КВО 0x0002 Срабатывание ПВО 0x0004 Срабатывание ПВЗ 0x0008 Срабатывание КВЗ 0x0010 Превышен момент открытия (срабатывание МВО) 0x0020 Превышен момент закрытия (срабатывание МВЗ) 0x0040 Запрет открытия 0x0080 Запрет закрытия 0x0100 После выключения был самоход 0x0200 Запрет защиты 0x0400 ЭД включен на открытие 0x0800 ЭД включен на закрытие Таблица Л.4 – Значение битов основного кода неисправности (индекс регистра 0x10) Код Значение 0x0001 Неисправность аппаратуры 0x0002 Электроконтроль 0x0004 Превышение допустимого значения момента 0x0008 Перегрев ЭД 0x0010 Неправильное направление включения 0x0020 Отсутствие движения 0x0040 Превышено максимальное время включения 0x0080 Требуется настройка датчика положения 0x0100 Требуется настройка датчика момента 0x0200 Требуется тарирование датчика положения 0x0400 Требуется настройка Таблица Л.5 – Значение битов кода неисправности электроконтроля (индекс регистра 0x11) Код Значение 0x0001 Дисбаланс знаков 0x0002 Пробой 0x0004 Обрыв (недогрузка) 0x0008 Перегрузка по току 0x0010 Предельная перегрузка 0x0020 Экстраток (КЗ) 0x0040 Дисбаланс токов 0x0080 Обрыв фазы В 0x0100 Обрыв фазы С 0x0200 Переменное чередование фаз Таблица Л.6 – Значение битов кода неисправности по фазам (индекс регистра 0x12 — 0x14) Код Значение 0x0001 Дисбаланс знаков 0x0002 Пробой 0x0004 Обрыв (недогрузка) 0x0008 Перегрузка по току ЯЛБИ.421413.006 РЭ Таблица Л.7 – Значение битов кода неисправности аппаратуры (индекс регистра 0x15) Код значение 0x0001 Нет готовности SPI1 0x0002 Нет готовности SPI2 0x0004 Неисправность I2С1 0x0008 Неисправен датчик положения 0x0010 Неисправен датчик момента 0x0020 Неисправен датчик температуры ЭД Таблица Л.8 – Значение битов кода предупреждений (индекс регистра 0x16) Код Значение 0x0001 Остановлено по превышению тока при уплотнении 0x0002 Остановлено по превышению времени уплотнения 0x0004 Потеря сигнала задания при аналоговом управлении 0x0008 Запрет источников местного управления 0x0010 питание от батареи 0x0020 батарея разряжена Таблица Л.9 – Значение битов кода активности источников управления (индекс регистра 0x0A) Код Значение 0x0001 1Д. Сигнал «АВАРИЯ» 2Д. Управление дискретными входными сигналами при наличии сигнала на входе 0x0002 «Активизация дискретного управления (АктДУ)» 0x0004 3М. Сетевое местное командное управление 0x0008 4М. Пульт настройки 0x0010 5Д. Сетевое дистанционное командное управление 0x0020 6Д. Позиционер (управление входным аналоговым сигналом) 7Д. Управление дискретными входными сигналами при отсутствии сигнала на вхоx0040 де «Активизация дискретного управления (АктДУ)» 0x0080 8Д. Автомат повторных включений (АПВ)
ЯЛБИ.421413.006 РЭ Л.2 Распределение адресов регистров Modbus соответствует принятому в контроллерах КРОСС -500. Полный доступ ко всем регистрам, способам управления и настройки возможен с помощью протокола Modbus CLP (Cross Link Protocol), который является расширением протокола Modbus RTU и используется блоком центрального процессора контроллера КРОСС-500 (для связи с модулями ввода-вывода), а также программой «Конфигуратор» .
Для обеспечения возможности организации простого управления по интерфейсу RS-485 контроллер КИМ2 поддерживает выполнение следующих команд протокола Modbus RTU, позволяющих реализовать сетевое командное управление и контролировать состояния контроллера
ЯЛБИ.421413.006 РЭ При неправильном значении адреса или CRC16 контроллер не отвечает .
При неправильном значении кода функции или длины сообщения в ответе к коду функции добавляется старший бит и в следующем байте возвращается код ошибки:
— 01 – недопустимый код функции;
— 04 – неверная длина сообщения .
Все контроллеры реагируют (но не отвечают) на широковещательные адреса 0 и 254 .
Адрес 253 может использоваться для обнаружения одиночных контроллеров на линии .
Все контроллеры отвечают на этот адрес, изменив в ответе адрес 253 на свой .
Первоначально после изготовления все контроллеры имеют адрес 239. Он должен быть изменен перед использованием нескольких контроллеров в одной сети на другой в диапазоне от 0 до 238 .
Скорость обмена по интерфейсу RS-485 первоначально задается 19200 бод. Скорость может быть изменена с помощью программы «Конфигуратор» (приложение Д), ЭПН (приложение Е) или кнопок (2.3) .
Формат кадра – 8N1 – восемь бит данных, нет бита четности, один стоповый бит. Формат не может быть изменен .
Расчет CRC16 выполняется по следующей процедуре:
1) загрузить шестнадцатиразрядный регистр числом FFFFH;
2) выполнить операцию XOR над первым байтом данных и старшим байтом регистра .
Поместить результат в регистр;
3) сдвинуть регистр на один разряд вправо;
4) если выдвинутый вправо бит единица, выполнить операцию XOR между регистром и полиномом 1010 0000 0000 0001 (A001H);
5) если выдвинутый бит ноль, вернуться к шагу 3;
6) повторять шаги 3 и 4 до тех пор, пока не будут выполнены 8 сдвигов регистра;
7) выполнить операцию XOR над следующим байтом данных и регистром;
 повторять шаги 3 – 7 до тех пор, пока не будет выполнена операция XOR над всеми байтами данных и регистром;
повторять шаги 3 – 7 до тех пор, пока не будет выполнена операция XOR над всеми байтами данных и регистром;
9) содержимое регистра представляет собой два байта CRC и добавляется к исходному сообщению старшим битом вперед .
Далее приведен пример процедуры расчета на языке С .
WORD AddToCRC16Sum(WORD wChecksum, BYTE btData) < BYTE btCount;
Приведенные выше команды позволяют получить доступ к регистрам контроля состояния контроллера и управления. Доступ по чтению имеют все описанные выше регистры. Доступ по записи имеют два регистра командного управления:
— 0xC001 — команда сетевого командного управления .
Настройка параметров (запись в другие регистры) может выполняться с помощью программы «Конфигуратор» (приложение Д), ЭПН (приложение Е) или кнопок (2.3.2) .
М.1 Impout — Импульсное управление Назначение Алгоритм применяется в тех случаях, когда контроллер должен управлять исполнительным механизмом постоянной скорости .
Алгоритм преобразует сигнал, сформированный алгоритмами контроллера (в частности, алгоритмом импульсного регулирования), в последовательность импульсов переменной скважности, и выдает импульсные сигналы на выходы алгоритма Db (выход «больше») и Dm (выход «меньше») .
Описание алгоритма Алгоритм содержит широтно-импульсный модулятор (ШИМ), преобразующий входной сигнал Х в последовательность импульсов со скважностью Q, пропорциональной входному сигналу: Q=X/100. При Х100 % скважность Q=1. Если X0, импульсы формируются в выходной цепи «больше», если X0, то в цепи «меньше». При Х=0 выходной сигнал равен нулю .
Параметр Тmin задает минимальную длительность выходного импульса .
Параметры Тlb и Тlm задают время дополнительного импульса для выборки люфта исполнительного механизма в направлении соответственно «больше» или «меньше» при изменении направления его движения .
Параметры Тmin, Тlb и Тlm задаются во временном формате и округляется до значения, кратного времени цикла контроллера .
Входы-выходы алгоритма Impout приведены в таблице М.1. Функциональная схема алгоритма приведена на рисунке М.1 .
Назначение Алгоритм используется для периодического включения и выключения нагрузки в том случае, когда скважность включения должна быть пропорциональна непрерывному управляющему сигналу .
Описание алгоритма Алгоритм представляет собой широтно-импульсный (ШИМ) модулятор с заданным периодом и меняющейся длительностью включения .
Если входной сигнал Х0, то импульсы формируются на дискретном выходе Db (больше), если X0, то на выходе Dm (меньше) .
Диаграмма формируемых импульсов представлена на рисунке М.2 .
Период следования импульсов задается сигналом на настроечном входе алгоритма Т .
Длительность выходных импульсов определяется по формуле:
tи=|X|*T/100 (1) Если Х=0, то tи=0; если |Х| 100 %, то tи=Т (т.е. пауза отсутствует) .
Параметр Тmin задает минимальную длительность выходного импульса: при tиTmin принимается tи=0 .
Параметры Тlb и Тlm задают время дополнительного импульса для выборки люфта исполнительного механизма в направлении соответственно «больше» или «меньше» при изменении направления его движения .
ЯЛБИ.421413.006 РЭ
Если вычисленное значение tиТо, где То – время цикла контроллера, то реализуемое значение tи=То, причем часть импульсов при этом «пропадает», так, что в среднем сохраняется пропорциональность зависимости между скважностью и входным сигналом .
Если установленное значение периода ТТо, то реализуемое значение tи=0 (т.е. импульсы не формируются) .
Входы-выходы алгоритма IMP приведены в таблице М.2, функциональная схема – на рисунке М.3 .
М.3 Реализация данных алгоритмов в контроллере КИМ2 Реализация данных алгоритмов в контроллере КИМ2 позволяет уменьшить нагрузку на технологический контроллер, сняв с него управление ЭП в реальном времени, а также позволяет повысить точность соблюдения временных интервалов для импульсов и пауз, снизить интенсивность обмена по сети .
Для управления по скорости технологический контроллер должен по сети Modbus периодически передавать в контроллер КИМ2 уставку скорости – входной сигнал X описанных выше алгоритмов .
Это может быть сделано сетевой командой 0x0800 «Задать скорость». Величина скорости в этом случае задается в младшем байте команды, как знаковое байтовое целое число в диапазоне от минус 100 % до плюс 100 % .
ЯЛБИ.421413.006 РЭ
Параметры настройки группы Н позволяют выбрать тип алгоритма и задать значения для остальных входов алгоритмов (таблицы М.1 и М.2). Параметр Н2 соответствует входу T алгоритма IMP. Параметр Н3 соответствует входу Tmin обоих алгоритмов. Параметры Н4 и Н5 соответствует входам Tlb и Tlm обоих алгоритмов соответственно .
Выходы алгоритмов непосредственно управляют контроллером КИМ2 .
Н.1 Основные функции Profibus DP сети При подключении контроллеров КИМ2 с опцией «Profibus-1» или «Profibus-2» к сети Profibus DP ведущее управляющее устройство (управляющий контроллер, компьютер) периодически считывает входные данные от ведомых устройств (контроллеров КИМ2) и посылает выходные данные к ведомым устройствам .
Н.2 Конструкция Работа контроллера КИМ2 в сети Profibus DP обеспечивается с помощью модуля Unigate Profibus DPL (далее – модуль Unigate). В контроллере может быть установлено один или два модуля Unigate – соответственно один или два канала Profibus DP .
Н.3 Подключение к сети Profibus DP Для прокладки Profibus DP шины разрешается применять только кабели, соответствующие стандарту DIN 19245 или EN 50170-2, тип кабеля A .
Технические характеристики кабеля:
— волновое сопротивление – (135-165) при измеряемой частоте (3-20) MHz;
— погонная емкость – не более 30 pF/m;
— диаметр провода – не менее 0,64 mm;
— сечение провода – не менее 0,34 mm2, соответствует AWG 22;
— погонное сопротивление – не более 110 /km;
— экранирование – медная оплетка или оплетка и экран из фольги .
Значения скорости передачи данных в зависимости от длины шины Profibus DP приведены в таблице Н.1 .
Скорость работы в сети Profibus DP управляющее устройство устанавливает автоматически .
Подключение контроллера к сети Profibus DP осуществляется через клеммную колодку или клеммы на платах коммутации согласно таблице И.2 и рисунку Н.1 .
Пример подключения цепей сети Profibus DP показан на рисунке Н.2. На предприятииизготовителе переключатели оконечной нагрузки (микропереключатели «1» и «2») выставлены в положение «»OFF (настройка для промежуточного ЭП). При вводе ЭП в эксплуатацию в системе управления необходимо для конечного ЭП установить переключатель оконечной нагрузки контроллера (микропереключатели «1» и «2») в положение «ON» .
Н.4 Настройка адреса в сети Profibus DP и скорости обмена Настройка в сети Profibus DP заключается в настройке адреса. Скорость обмена настраивается автоматически в зависимости от длины линии связи .
В качестве адреса для канала 1 контроллера в сети Profibus DP используется сетевой адрес контроллера, который должен быть задан в пределах 1-126. Настройка сетевого адреса с помощью кнопок ПМУ описана в 2.3.2.7. Также можно выполнить данную настройку с помощью компьютера с программой «Конфигуратор» в закладке «Коммуникации» (приложение Д) .
Адрес устанавливается при включении питания контроллера и конфигурировании сети Profibus DP. Для канала 2 сети Profibus устанавливается адрес на единицу больше адреса канала 1. Например, адрес канала 1 сети Profibus DP равен сетевому адресу контроллера – 3, адрес канала 2 будет равен 4 .
ВНИМАНИЕ: ДЛЯ ИЗМЕНЕНИЯ АДРЕСА PROFIBUS DP НЕОБХОДИМО
ВЫКЛЮЧИТЬ И ВКЛЮЧИТЬ ПИТАНИЕ КОНТРОЛЛЕРА!
Н.5 Протоколы обмена между управляющим устройством сети Profibus DP и контроллером КИМ2 В управляющем устройстве должен быть установлен GSD-файл «ugic3218.gsd», из которого должен быть использован модуль данных «16 Byte I/O (konsistent)». Файл находится на компакт-диске из комплекта поставки .
Обмен данными между управляющим устройством и контроллером КИМ2 происходит через модуль Unigate. Для управления контроллером модуль Unigate использует сетевое командное управление. Команда управления от управляющего устройства (протокол выхода) выдается контроллеру при изменении данных, передаваемых по сети Profibus DP. Команды выполняются при изменении кода в любом байте. В случае неверного кода команды и при обрыве связи выполняется команда «СТОП» .
ЯЛБИ.421413.006 РЭ Обратно в управляющее устройство из контроллера КИМ2 передаются коды состояния и коды неисправности (протокол входа). Данные читаются модулем Unigate из контроллера КИМ2 циклически с периодом 100 ms, а также при выполнении любой команды .
Входной и выходной протоколы обмена по сети Profibus DP между управляющим устройством и контроллером КИМ2 приведены в таблицах Н.2 и Н.3 .
ЯЛБИ.421413.006 РЭ ОАО «АБС ЗЭиМ Автоматизация» 428020, Россия, Чувашская Республика, г. Чебоксары, пр. И. Яковлева, 1 тел.: (8352) 30-51-48, 30-52-21
 «Официальная поддержка Форума: Организаторы Форума: Правительство Администрация Пермского края города Перми Проект программы 30.04.2015 IV Архитектурно-строительный форум 12 16 мая 2015 года, г. Пермь, бульвар Гагарина, 65, Выставочный центр «Пермская ярмарка» в сроки 21-ой международной специализированной выставки «Стройком. »
«Официальная поддержка Форума: Организаторы Форума: Правительство Администрация Пермского края города Перми Проект программы 30.04.2015 IV Архитектурно-строительный форум 12 16 мая 2015 года, г. Пермь, бульвар Гагарина, 65, Выставочный центр «Пермская ярмарка» в сроки 21-ой международной специализированной выставки «Стройком. »
«ГОСУДАРСТВЕННЫЙ СТАНДАРТ СОЮЗА ССР ВЕЩЕСТВА ВЗРЫВЧАТЫЕ ПРОМЫШЛЕННЫЕ МЕТОДЫ ИСПЫТАНИЙ В М ЕТА Н О ВО ЗД УШ Н О Й И ПЫ ЛЕВОЗДУШ НОЙ СМ ЕСЯХ ГО С Т 7140-81 Издание официальное ГОСУДАРСТВЕННЫЙ КОМИТЕТ С С С Р ПО СТАНДАРТАМ Москва белое кружевное платье УДК 662.2/.3.001.4:006.354 Группа Л7″ ГОСУДАРСТВ. »
«ГОСТ 20996.5-82 МЕЖГОСУДАРСТВЕННЫЙ СТАНДАРТ СЕЛЕН ТЕХНИЧЕСКИЙ МЕТОД ОПРЕДЕЛЕНИЯ ОРГАНИЧЕСКИХ ВЕЩЕСТВ Издание официальное $ I БЗ 6 ИНК ИЗДАТЕЛЬСТВО СТАНДАРТОВ М осква магазин декора УДК 669.776:543.06:006.354 Группа В59 СЕЛЕН ТЕХНИЧЕСКИЙ Метод определения органических веществ ГОСТ 20996.582* Selenium. Method of organic mat. »
«УТВЕРЖДЕН приказом Министерства труда и социальной защиты Российской Федерации от _ 2015 г. № ПРОФЕССИОНАЛЬНЫЙ СТАНДАРТ Работник по эксплуатации оборудования, работающего под избыто. »
«ИНСТРУКЦИЯ ПО НАБЛЮДЕНИЯМ ЗА СДВИЖЕНИЕМ ГОРНЫХ ПОРОД, ЗЕМНОЙ ПОВЕРХНОСТИ И ПОДРАБАТЫВАЕМЫМИ СООРУЖЕНИЯМИ НА УГОЛЬНЫХ И СЛАНЦЕВЫХ МЕСТОРОЖДЕНИЯХ оценка ущерба недвижимости МИНИСТЕРСТВО УГОЛЬНОЙ ПРОМЫ. »
«ФРИЗЕР ДЛЯ МОРОЖЕНОГО ИНСТРУКЦИЯ ПО ЭКСПЛУАТАЦИИ МОДЕЛЬ: ICМ-1518 Перед использованием машины внимательно ознакомьтесь с настоящей инструкцией по эксплуатации и сохраните ее для дальнейшего использования. ИНСТРУКЦИЯ ПО ЭКСПЛУАТАЦИИ В целях обеспечения вашей безопасности и продолж. »
«2 СОДЕРЖАНИЕ 1. НАЗНАЧЕНИЕ 2. ТЕХНИЧЕСКИЕ ДАННЫЕ 3. КОМПЛЕКТНОСТЬ 4. ОРГАНЫ УПРАВЛЕНИЯ 5. УКАЗАНИЯ МЕР БЕЗОПАСНОСТИ 6. ТРАНСПОРТИРОВАНИЕ И ХРАНЕНИЕ 7. УСТАНОВКА И МОНТАЖ 8. ПОДГОТОВКА К РАБОТЕ 9. ПОРЯДОК РАБОТЫ 10. ГА. »
«ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ТЕХНИЧЕСКОМУ РЕГУЛИРОВАНИЮ И МЕТРОЛОГИИ ГОСТР НАЦИОНАЛЬНЫЙ СТАНДАРТ 1 2.4.2 4 4 — РОССИЙСКОЙ ФЕДЕРАЦИИ Система стандартов безопасности труда СРЕДСТВА ИНДИВИДУ. »
«ГОСТ OIML R 111-1-2009 ГСИ. ГИРИ КЛАССОВ Е1, Е2, F1, F2, М1, М1-2, М2, М2-3 и М3. Часть 1. Метрологические и технические требования МЕЖГОСУДАРСТВЕННЫЙ СТАНДАРТ Дата введения 01.07.2012 Предисловие Цели, основные принципы и основной порядок проведения рабо. »
«Почти пустые шестиугольники В. А. КОШЕЛЕВ Московский физико-технический институт e-mail: koshelev@mccme.ru УДК 519.154+519.146 Ключевые слова: выпуклые многоугольники, общее положение, проблема Эрдёша—Секереша, теория Рамсея. Аннотация В работе получе. »
«Локационная Система Направленного Бурения Руководство оператора DCI Headquarters DIGITAL 19625 62nd Ave S, Suite B103 CONTROL Kent Washington 98032, USA 425 251 0559 / 800 288 3610, 253 395 2800 fax INCORPORATED dci@digital-control.com www.digitrak.com. »
«МЕЖГОСУДАРСТВЕННЫЙ СОВЕТ ПО СТАНДАРТИЗАЦИИ, МЕТРОЛОГИИ И СЕРТИФИКАЦИИ (МГС) INTERSTATE COUNCIL FOR STANDARDIZATION, METROLOGY AND CERTIFICATION (ISC) ГОСТ МЕЖГОСУДАРСТВЕННЫЙ 32675— СТАНДАРТ ТАРА СТЕКЛЯННАЯ Оценка соответствия. Правила отбора образцов. Об. »
«№2 ЭЛЕКТРОННЫЙ НАУЧНЫЙ ЖУРНАЛ «APRIORI. CЕРИЯ: ЕСТЕСТВЕННЫЕ И ТЕХНИЧЕСКИЕ НАУКИ» СПУТНИКОВЫЕ СИСТЕМЫ КАК КОМПЛЕКС МЕР ПО БЕЗОПАСНОСТИ МОРЕПЛАВАНИЯ Боран-Кешишьян Анастас Леонидович доктор технических наук Колодченко Самира Сергеевна аспирант Государственный мо. »
«Бриф на разработку логотипа и фирменного стиля Этот бриф поможет нам подготовиться к работе, чтобы сделать её для вас наилучшим образом. От того насколько четко и исчерпывающе вы ответите на вопросы зависит, как быстро мы с вами начнём го. »
«ГОСУДАРСТВЕННЫЙ СТАНДАРТ СОЮЗА ССР САРДИНЫ ГО РЯ ЧЕГО КОПЧЕНИЯ ТЕХНИЧЕСКИЕ УСЛОВИЯ ГОСТ 12849— 67 Издание официальное ГОСУДАРСТВЕННЫЙ КОМИТЕТ СССР ПО СТАНДАРТАМ Москва проектные изыскания УДК 664.951.3Ш5(083.74) Группа Н26 ГОСУДАРСТВЕННЫЙ СТАНДАРТ СОЮЗА ССР САРДИНЫ ГОРЯЧЕГО КОПЧЕНИЯ ГО СТ Технические условия. »
«МАШИНА СТИРАЛЬНО-ОТЖИМНАЯ ВО-30 РУКОВОДСТВО ПО ЭКСПЛУАТАЦИИ ВО-30.00.00.000 РЭ ВНИМАНИЕ! При работе машины, находиться против загрузочного люка НЕ РЕКОМЕНДУЕТСЯ. ВНИМАНИЕ! Для открывания крышки люка освободить от фиксации замок! Для этого отжать ось фиксатора, вставив отвертку в отверст. »
«Министерство образования и науки Российской Федерации Сыктывкарский лесной институт (филиал) федерального государственного бюджетного образовательного учреждения высшего профессионального образования «Санкт-Петербургский государственный лесотехнический университет имени С. М. Кирова» Кафедра лесного хозяйства В. »
«1 Протокол № ЗКЭФ-АХО-35П Заседания Единой комиссии Заказчика (АО «КСК») г. Москва 13 апреля 2017 г. Заказчик: Акционерное общество «Курорты Северного Кавказа» 1. (далее АО «КСК», ИНН 2632100740).На заседании Единой комиссии присутствовали: 2. Исаев Сергей Петрович, Синицина. »
«Instruction of Use GUIDE 343 Sizes: 8 9 10 11 Cat. 2 EN388 Notified body: 0403 FINNISH INSTITUTE OF OCCUPATIONAL HEALTH Topeliuksenkatu, 41a A FIN 00250 Helsinki +358 30 474 2681, fax +358 30 474 2115 Guide is sold and marketed by: SKYDDA PROTECTING PEOPLE EUROPE AB SE-523 85 Ulricehamn, Sweden Ph: +46 (. »
«МАНУЙЛОВИЧ Иван Сергеевич ВЗРЫВНЫЕ И ДЕТОНАЦИОННЫЕ ПРОЦЕССЫ В КАНАЛАХ И ОТКРЫТОМ ПРОСТРАНСТВЕ Специальность 01.02.05 – механика жидкости, газа и плазмы АВТОРЕФЕРАТ диссертации на соискание ученой степени кандидата физико-математических наук. »
«Объединение независимых экспертов в области минеральных ресурсов, металлургии и химической промышленности _ Обзор рынка аммиачной селитры для производства промышленных взрывчатых веществ и рынка бур. »
2019 www.mash.dobrota.biz — «Бесплатная электронная библиотека — онлайн публикации»
Материалы этого сайта размещены для ознакомления, все права принадлежат их авторам.
Если Вы не согласны с тем, что Ваш материал размещён на этом сайте, пожалуйста, напишите нам, мы в течении 1-2 рабочих дней удалим его.
Источник
Интеллектуальный блок КИМ2 обеспечивает базовый набор функций для управления электроприводом и арматурой, контроля их работы, настройки необходимых параметров. Интеллектуальный блок КИМ2 создает в энергонезависимой памяти детализированные отчетные данные о работе электропривода и арматуры. Архив статистических данных может быть сохранены в виде текстового файла в программе «Конфигуратор».
Интеллектуальный блок КИМ2 устанавливается непосредственно на электроприводе. Панель местного управления КИМ2, а также корпус КИМ2 в зависимости от пространственного расположения электропривода с арматурой на объекте могут быть повернуты в необходимое удобное положение (конструктивные исполнения 0, 1 и 2).
Состав панели местного управления (ПМУ) КИМ2
- Цифровой индикатор положения и момента, кодов неиправностей, параметров настройки
- Светодиодная индикация для отображения направления движения, конечных положений, превышения момента, неисправности, необходимости замены батареи
- Переключатель режимов управления (селектор)
- Кнопки управления и настройки
- Замок для механической блокировки
Управление электроприводом и арматурой через интеллектуальный блок КИМ2 осуществляется местно (с панели ПМУ) и дистанционно. Возможности дистанционного управления, состав и виды входных и выходных сигналов зависят от выбранной конфигурации и дополнительных опций.
 Схема подключения ЭП с интеллектуальным блоком управления КИМ2
Схема подключения ЭП с интеллектуальным блоком управления КИМ2
Каталог «Электроприводы для автоматизации трубопроводной арматуры»
 Сертификаты соответствия
Сертификаты соответствия
- Обязательно представиться на русском языке кириллицей (заполнить поле «Имя»).
- Фиктивные имена мы не приветствуем. Ивановых и Пупкиных здесь уже достаточно.
- Не писать свой вопрос в первую попавшуюся тему — вместо этого создать новую тему.
- За поиск, предложение и обсуждение пиратского ПО и средств взлома — бан без предупреждения.
- Рекламу и частные объявления «куплю/продам/есть халтура» мы не размещаем ни на каких условиях.
- Перед тем как что-то написать — читать здесь и здесь.
-
Konstantin_85
- здесь недавно

- Сообщения: 4
- Зарегистрирован: 15 авг 2021, 11:34
- Имя: Константин
- Страна: россия
- город/регион: Давлеканово

Электропривод с КИМ2
Сообщение
Konstantin_85 » 19 фев 2023, 07:02
Здравствуйте, форумчане! Нужна ваша помощь! Имеется электропривод с контроллером управления КИМ2. Управление по дискретам. По схеме должны подключаться на контакты 14,15,16, где 15 — это общий, 14 — закрыть, 15 — открыть. В шкафу ЛСУ реализовано управление типа «сухой контакт» без питания, но есть подозрения, что должно подаваться 24В. Правильно ли я думаю?
-
olexsa
- авторитет
- Сообщения: 832
- Зарегистрирован: 29 май 2009, 21:40
- Имя: Александр
- Страна: Россия
- город/регион: Курган
- Благодарил (а): 42 раза
- Поблагодарили: 91 раз

Электропривод с КИМ2
Сообщение
olexsa » 19 фев 2023, 08:06
А зачем контакты в КИМ2 17-18?
Отправлено спустя 4 минуты 24 секунды:
Konstantin_85 писал(а): ↑19 фев 2023, 07:02
Управление по дискретам. По схеме должны подключаться на контакты 14,15,16, где 15 — это общий, 14 — закрыть, 15 — открыть
Не воспринимайте как «наезд», но то, что нашел в инете по КИМ2, так то на 14, 16 — это входа оптопар. И наверняка по ним имеются ограничения по току, по напряжению.
Схему расключений можете приложить? Только как именно у Вас сделано, а не выдержки из инета.
-
mazytus
- осмотрелся
- Сообщения: 114
- Зарегистрирован: 20 июл 2015, 06:43
- Имя: Мазитов Максим Вазирович
- Страна: Россия
- город/регион: Красноярск
- Благодарил (а): 23 раза
- Поблагодарили: 12 раз

Электропривод с КИМ2
Сообщение
mazytus » 19 фев 2023, 16:06
ТС, вы бы привели полностью название привода, чтобы знать что искать…
Ели не ошибаюсь, вам нужно со встроенного блока питания с 36 (+) клеммы подать на общий 15.
Противоположный потенциал 37(-) подать на контакт соответствующего реле и отправить на соответствующий вход КИМ2.
- [+]
У вас нет необходимых прав для просмотра вложений в этом сообщении.
Практик всегда пристрелит теоретика…
Eplan 2.7 > 2.9 > 2022.
-
Konstantin_85
- здесь недавно
- Сообщения: 4
- Зарегистрирован: 15 авг 2021, 11:34
- Имя: Константин
- Страна: россия
- город/регион: Давлеканово
Электропривод с КИМ2.
Сообщение
Konstantin_85 » 24 фев 2023, 09:03
Всем здравствуйте! Меня зовут Константин! Поздравляю с прошедшим праздником!
У меня такой вопрос. Почему при закрытии арматуры не выдаётся сигнал на 3и 4 контакты КИМ2 — Положение закрыто? При этом индикатор на лицевой панели загорается. Может настройка какая-то слетела? Руководство уже вдоль и поперёк изучил, но так ничего и не нашёл ![]() Помогите, пожалуйста
Помогите, пожалуйста ![]()
-
olexsa
- авторитет
- Сообщения: 832
- Зарегистрирован: 29 май 2009, 21:40
- Имя: Александр
- Страна: Россия
- город/регион: Курган
- Благодарил (а): 42 раза
- Поблагодарили: 91 раз
Электропривод с КИМ2.
Сообщение
olexsa » 24 фев 2023, 19:02
Konstantin_85, это Ваше сообщение? viewtopic.php?t=17822
Среди всех прочих вопросов был и такой :
«ТС, вы бы привели полностью название привода, чтобы знать что искать…»
По сути, он актуальный и в этой теме.
-

Jackson
- администратор
- Сообщения: 15962
- Зарегистрирован: 17 июн 2008, 16:01
- Имя: Евгений свет Брониславович
- Страна: Россия
- город/регион: Санкт-Петербург
- Благодарил (а): 578 раз
- Поблагодарили: 1019 раз


Электропривод с КИМ2
Сообщение
Jackson » 28 фев 2023, 18:12
olexsa писал(а): ↑24 фев 2023, 19:02
Konstantin_85, это Ваше сообщение? viewtopic.php?t=17822
Теперь обе темы объединены.
По вопросам работы Форума можно обратиться по этим контактам.
Вернуться в «Исполнительные устройства, регуляторы»
Перейти
- Работа форума
- База знаний (Knowledge Exchange)
- ↳ Eplan Electric P8
- ↳ Общий F.A.Q.
- ↳ Общие вопросы
- ↳ Новости
- ↳ Ошибки
- ↳ Проект
- ↳ Изделия
- ↳ Устройства
- ↳ Соединения
- ↳ Кабели
- ↳ Клеммы
- ↳ ПЛК
- ↳ Компоновка 2D
- ↳ Макросы
- ↳ Eplan API
- ↳ Сценарии (Только готовые решения)
- ↳ Внешняя обработка
- ↳ ProPanel
- ↳ Инструкции ProPanel (Только готовые решения)
- ↳ Прочие направления Eplan
- ↳ FieldSys (Топология)
- ↳ Preplanning
- ↳ Harness proD
- ↳ EEC One
- ↳ Advantech
- ↳ F.A.Q., Инструкции
- ↳ Allen Bradley
- ↳ Общие вопросы
- ↳ ПЛК
- ↳ Операторские панели
- ↳ B&R Automation
- ↳ F.A.Q.
- ↳ Danfoss
- ↳ DEIF A/S
- ↳ Общие вопросы
- ↳ UNI-LINE
- ↳ MULTI-LINE
- ↳ MULTI-LINE 300
- ↳ Emerson
- ↳ Общие вопросы
- ↳ КИП и регуляторы
- ↳ DeltaV
- ↳ ОВЕН
- ↳ Прософт-Системы
- ↳ Общие вопросы
- ↳ ПЛК REGUL
- ↳ Schneider Electric
- ↳ Общие вопросы
- ↳ ПЛК
- ↳ Панели оператора
- ↳ SCADA
- ↳ Электротехника
- ↳ Приводная техника
- ↳ SIEMENS
- ↳ Общие вопросы
- ↳ LOGO!
- ↳ ПЛК SIMATIC (S7-200, S7-1200, S7-300, S7-400, S7-1500, ET200)
- ↳ Simatic Step7
- ↳ Simatic TIA Portal
- ↳ Simatic PCS 7
- ↳ Операторские панели
- ↳ WinCC
- ↳ Приводная техника (Sinamics, Micromaster, Masterdrive, Simoreg, Simotics)
- ↳ SmartGen
- ↳ Общие вопросы
- ↳ Промышленные (береговые) контроллеры
- ↳ Морские контроллеры и устройства
- ↳ WEINTEK (операторские панели)
- ↳ F.A.Q., Инструкции
- ↳ Архив
- ↳ Микроконтроллеры и электроника
- ↳ Arduino
- ↳ Raspberry
- ↳ Другие микроконтроллеры
- ↳ Электроника
- Общие вопросы АСУТП
- ↳ Общие вопросы
- ↳ Вопросы от студентов
- ↳ Литература
- ↳ Новости и отчётность
- ↳ Нормативы, ГОСТы, стандарты
- ↳ Информационная безопасность
- ↳ Проектирование и САПР
- ↳ Системная интеграция
- ↳ Разбор полетов
- ↳ Работа
- ↳ Заготовки для базы знаний
- ↳ Производство и технология
- ↳ MES — Системы автоматизации управления производством
- ↳ Метрология, КИП и датчики
- ↳ Исполнительные устройства, регуляторы
- ↳ Средний уровень автоматизации (управляющий)
- ↳ Алгоритмы
- ↳ Операторские панели
- ↳ Верхний уровень автоматизации (отображение)
- ↳ GE iFix
- ↳ Wonderware Intouch
- ↳ MasterScada
- ↳ SCADA+
- ↳ Альфа платформа
- ↳ Интерфейсы, протоколы, связь
- ↳ Радиосвязь
- ↳ Полезное ПО
- ↳ Электротехника, энергетика и электропривод
- ↳ Генераторы, электростанции и силовые агрегаты
- ↳ Теплотехника
- ↳ Подбор аналогов
- F.A.Q. (краткая выжимка из некоторых сообщений форума)
- ↳ Документация (вариант 1)
- ↳ Документация (вариант 2)
- ↳ Электротехника и электроэнергетика
- ↳ F.A.Q. по программируемым логическим контроллерам (PLC)
- ↳ Обсуждение F.A.Q. по PLC
- ↳ F.A.Q. по выбору PLC
- ↳ F.A.Q. по аппаратной части PLC
- ↳ F.A.Q. по языкам программирования
- ↳ F.A.Q. по структуре программ
- ↳ F.A.Q. по взаимодействию PLC с HMI
- О жизни
- ↳ Для дома, для семьи
- ↳ Комната смеха
- ↳ Электродвижение
Интеллектуальный блок КИМ2 предназначен для управления электрическими механизмами постоянной скорости: однооборотными МЭО, МЭОФ, многооборотными приводами ПЭМ, прямоходными ПЭП (после 2008 года разработки).
КИМ2 изготавливается двух исполнениях – общепромышленном или взрывозащищенном. Вид взрывозащиты «взрывонепроницаемая оболочка «d» по ГОСТ Р МЭК 60079-1-2007 и уровень взрывозащиты электрооборудования Gb с маркировкой взрывозащиты «1Ex d IIC T4 Gb» (или «1Ex d IIB T4 Gb») по ГОСТ Р МЭК 60079-0-2011.
КИМ2 принимает команды от управляющего контроллера, управляет работой электродвигателя, реализует в себе функции пускорегулирующего устройства, передает по обратной связи информацию о состоянии электропривода и арматуры.
Особенности
- Установка непосредственно на электроприводе;
- Жесткие условия эксплуатации на объекте – температура до +85 °С и вибрация;
- Панель местного управления (ПМУ) с цифровым дисплеем, световыми индикаторами состояния электропривода, кнопками управления и настройки «Открыть», «Закрыть», селектором «Местное/Дистанционное»;
- Возможность поворота ПМУ в зависимости от положения электропривода;
- Возможность настройки и управления без вскрытия оболочки:
- от панели ПМУ;
- по беспроводному интерфейсу Bluetooth c программным обеспечением собственной разработки для связи с КПК с ОС Android или ПК, дальность действия до 10 м;
- с помощью служебного интерфейса ПК (программное обеспечение «Конфигуратор»).
- Сохранение параметров настройки в энергонезависимой памяти;
- Встроенный стабилизированный источник питания = 24 В, 50 мА для активизации внешних цепей;
- Бесконтактный (тиристорный) реверсивный коммутатор;
- Абсолютный бесконтактный цифровой датчик положения и момента;
- Архив событий (полное время работы, количество включений, количество превышения момента и др.).
Функциональные особенности электроприводов с КИМ2
- Реверсивное управление рабочим органом арматуры по командам от управляющего контроллера;
- Виды сигналов связи с управляющим контроллером и другими устройствами:
- дискретные сигналы «Открыть», «Закрыть», «Авария»;
- аналоговые сигналы;
- два интерфейсных канала Profibus DP, с возможностью резервирования при подключении к управляющему контроллеру (Siemens и др.) или два интерфейсных канала RS-485, протокол Modbus RTU, с возможностью резервирования при подключении к управляющему контроллеру.
- Сигнализация о состоянии электропривода (выходные сигналы):
- дискретные сигналы «Открыто», «Закрыто», «Готовность», «Неисправность», М1, М2, М3 (многофункциональные выходы), выходами М2 и М3 комплектуется опционально;
- аналоговые сигналы;
- цифровые сигналы по двум каналам RS-485, протокол Modbus RTU, или по двум каналам Profibus DP с возможностью резервирования.
- Три режима работы:
- дистанционное управление от внешних устройств;
- местное управление от панели ПМУ;
- настройка и установка параметров.
- Диагностика электропривода и его защитные функции (контроль сетевого питания, автоматическая корректировка направления включения при изменении порядка чередования фаз питающего напряжения, защита при превышении или дисбалансе токов, обрыве фазы);
- Защитное отключение электродвигателя привода при перегрузке по току, превышении заданного момента на выходном органе электропривода, перегреве электродвигателя, превышении максимального времени хода;
- Установка выходного органа электропривода с уплотнением;
- Автоматическое управление подогревателем в зависимости от температуры окружающей среды.
Подробнее о решении: automation@abselectro.com
Тел.: +7 (8352) 30-52-63
Аппараты воздушного охлаждения для КС
Электроприводы МЭОФ с КИМ2
Заказчик: Новатэк
Аппараты воздушного охлаждения для КС
Электроприводы ПЭП с КИМ2
Заказчик: Новатэк
Аппараты воздушного охлаждения для КС
Электроприводы ПЭМ с КИМ2
Заказчик: Новатэк
Аппараты воздушного охлаждения для КС Елизаветинская
Электроприводы МЭОФ с КИМ2
Заказчик: Лукойл-Западная Сибирь
Аппараты воздушного охлаждения для КС Елизаветинская
Электроприводы ПЭМ с КИМ2
Заказчик: Лукойл-Западная Сибирь
Благовещенская ТЭЦ
Электроприводы ПЭМ с КИМ2
Заказчик: РусГидро — Дальневосточная генерирующая компания
Блок отгрузки Кокса и УПЭС ТИТ
Электроприводы ПЭМ с КИМ2
Заказчик: Антипинский НПЗ
Блок отгрузки Кокса и УПЭС ТИТ
Электроприводы ПЭП с КИМ2 и КИМ3
Заказчик: Антипинский НПЗ
Восточно-Уренгойское, Ново-Уренгойское м-е
Электроприводы МЭОФ с КИМ2
Заказчик: Роснефть — Роспан-Интернешнл
Гавриковское м-е
Электроприводы МЭОФ с КИМ2
Заказчик: Лукойл-Западная Сибирь
Гавриковское м-е
Электроприводы ПЭМ с КИМ2
Заказчик: Лукойл-Западная Сибирь
Грозненская ТЭС
Электроприводы МЭОФ с КИМ2
Заказчик: Газпром — ОГК-2
Грозненская ТЭС
Электроприводы ПЭМ с КИМ2
Заказчик: Газпром — ОГК-2
ДНС с УПСВ Чапровского м-я
Электроприводы ПЭМ с КИМ2
Заказчик: Роснефть — НК Конданефть
Измерительные установки, СИКГ, СИКН
Электроприводы ПЭМ с КИМ2
Заказчик: Газпром нефть
Измерительные установки, СИКГ, СИКН
Электроприводы ПЭП с КИМ2
Заказчик: Газпром нефть
Когалымское м-е
Электроприводы ПЭМ с КИМ2
Заказчик: СП ЛУКойл-Аик
Когалымское м-е
Электроприводы ПЭП с КИМ2
Заказчик: СП ЛУКойл-Аик
Комплекс НПиНХЗ
Электроприводы ПЭМ с КИМ2
Заказчик: Татнефть — Танеко
Комплекс НПиНХЗ
Электроприводы МЭОФ с КИМ2
Заказчик: Татнефть — Танеко
КС Славянская
Электроприводы МЭОФ с КИМ2
Заказчик: Газпром Добыча Ноябрьск
КС Славянская
Электроприводы ПЭП с КИМ2
Заказчик: Газпром Добыча Ноябрьск
КС Славянская
Электроприводы ПЭМ с КИМ2
Заказчик: Газпром Добыча Ноябрьск
Лодочное, Тагульское, Сузунское м-е
Электроприводы ПЭМ с КИМ2
Заказчик: Роснефть — РН-Ванкор
НГДУ Сургутнефть, Быстринскнефть
Электроприводы ПЭМ с КИМ2
Заказчик: Сургутнефтегаз
НГДУ Сургутнефть, Быстринскнефть
Электроприводы МЭОФ с КИМ2
Заказчик: Сургутнефтегаз
НГДУ Федоровскнефть, Комсомольскнефть
Электроприводы МЭОФ с КИМ2
Заказчик: Сургутнефтегаз
Нефтегазодобывающие промыслы
Электроприводы ПЭМ с КИМ2
Заказчик: Роснефть — Самаранефтегаз
Нефтепровод от УПН Вятка НСП — Ашит, ДНС Якшур-Бодья, Решетниковское м-е
Электроприводы ПЭП с КИМ2
Заказчик: САФМАР — Белкамнефть им. А.А. Волкова
Нефтепровод от УПН Вятка НСП — Ашит, ДНС Якшур-Бодья, Решетниковское м-е
Электроприводы ПЭМ с КИМ2
Заказчик: САФМАР — Белкамнефть им. А.А. Волкова
УППН Павловка, УПСВ Рассвет, Шагиртско-Гожанское м-е
Электроприводы ПЭП с КИМ2
Заказчик: Лукойл — Лукойл-Пермь
УППН Павловка, УПСВ Рассвет, Шагиртско-Гожанское м-е
Электроприводы ПЭМ с КИМ2
Заказчик: Лукойл — Лукойл-Пермь
Установка НПЗ
Электроприводы МЭОФ с КИМ2
Заказчик: Лукойл — Лукойл-Волгограднефтепереработка
Установка НПЗ
Электроприводы ПЭМ с КИМ2
Заказчик: Лукойл — Лукойл-Волгограднефтепереработка
Ярактинское м-е
Электроприводы МЭОФ с КИМ2
Заказчик: Иркутская Нефтяная Компания
АБС ЗЭиМ Автоматизация
АБС ЗЭиМ Автоматизация – один ведущих российских разработчиков и производителей средств автоматизации для систем промышленной автоматики и автоматизированных систем управления технологическими процессами