Однооборотный электрический исполнительный механизм МЭК-10К [Текст] : инструкция по монтажу и эксплуатации
Карточка
Однооборотный электрический исполнительный механизм МЭК-10К [Текст] : инструкция по монтажу и эксплуатации / Чувашский совнархоз. — Чебоксары, 1962. — 11 с. : ил.; 20х29 см.
перемещение регулирующих оргнаов
системы автоматического регулирования
электродвигатель
малый редуктор
Шифр хранения:
SVT Инст Цбф/762
Описание
| Заглавие | Однооборотный электрический исполнительный механизм МЭК-10К [Текст] : инструкция по монтажу и эксплуатации |
|---|---|
| Дата поступления в ЭК | 17.10.2018 |
| Каталоги | Стандарты |
| Сведения об ответственности | Чувашский совнархоз |
| Выходные данные | Чебоксары, 1962 |
| Физическое описание | 11 с. : ил.; 20х29 см |
| Тема | перемещение регулирующих оргнаов |
| системы автоматического регулирования | |
| электродвигатель | |
| малый редуктор | |
| Язык | Русский |
| Места хранения | SVT Инст Цбф/762 |
Книжные памятники Свет
Обратная связь
Версия для слабовидящих
Войти
НЭБ
-
Коллекции и спецпроекты
-
Новости
-
Электронные читальные залы
-
Информация для библиотек
-
Вопросы и ответы
-
Обратная связь
Наши продукты
Книжные памятники
Свет
Мы в соцсетях
Версия для слепых
")
Однооборотный электрический исполнительный механизм МЭК-10К (Инструкция по монтажу и наладке)
Электронная копия документа недоступна
16 с., 2 л. схем.
Количество страниц
1961
Год издания
Чебоксары
Место издания
О произведении
Издательство
Б. и.
Ответственность
Чебоксарский завод электрических исполнительных механизмов
Общее примечание
На обл. загл.: МЭК-10К
Еще
Библиотека
Российская национальная библиотека (РНБ)
Еще
Ближайшая библиотека с бумажным экземпляром издания
Пожалуйста, авторизуйтесь
Вы можете добавить книгу в избранное после того, как
авторизуетесь на портале. Если у вас еще нет учетной записи, то
зарегистрируйтесь.

Описание:
Однооборотный электрический исполнительный механизм МЭК-10К : [Инструкция по монтажу и эксплуатации] / [Изготовитель: Чебоксар. завод электр. исполнит. механизмов]; Чуваш. совнархоз. — Чебоксары : Б. и., 1961. — 12 с. : черт. ; 26 см
Дата создания:
2021-11-03 08:45:05
Пожалуйста, помогите актуализировать информацию
Загрузить фотографию актуальной обложки книги
Дополнить или обновить информацию о книге
Купить
-
Посмотреть
-
Посмотреть
-
Посмотреть
-
Посмотреть
-
Посмотреть
-
Недоступно
-
Посмотреть
-
Посмотреть
-
Посмотреть
-
Посмотреть
-
Посмотреть
-
Посмотреть
-
Посмотреть
-
Посмотреть
-
Посмотреть
Реферат по теме Однооборотный электрический исполнительный механизм МЭК-10К : Инструкция по монтажу и эксплуатации
Помогите сайту стать лучше, ответьте на несколько вопросов про книгу:
Однооборотный электрический исполнительный механизм МЭК-10К : Инструкция по монтажу и эксплуатации
Опросы
Были по книге театр. постановки?
Содержание
- Объявление о покупке
- Наличие в библиотеках
- Рецензии и отзывы
- Похожие книги
- Наличие в магазинах
- Информация от пользователей
- Книга находится в категориях
Реставрация Однооборотный электрический исполнительный механизм МЭК-10К : Инструкция по монтажу и эксплуатации
Мойка листов, чистка, отбеливание, устранение заломов, восстановление разрывов, следов от влаги,
травление насекомых, реставрация обложки и корешка, устранение укусов от собак и восстановление
заломов на картоне, восстановление после падений, восстановление тиснения и рисунков,
художественная покраска всех элементов обложки от мастеров Ленинской библиотеки.
Мелкий ремонт (удаление пятен, плесени) или реставрацию обложки, уголков, корешка, листов, переплета книги
Показать контакты
Объявление о покупке (разыскивается книга)
Подпишитесь на новые объявления
Наличие в библиотеках
Название и адрес
Режим работы
Контактная информация
Телефон
санитарный день: последний рабочий день месяца
Вт: 09:00-13:00 14:30-18:30
Ср: 09:00-13:00 14:30-18:30
Чт: 09:00-13:00 14:30-18:30
Пт: 09:00-13:00 14:30-18:30
Сб: 09:00-13:00 14:30-18:30
Название и адрес
Режим работы
Контактная информация
Телефон
Дом еврейской книги, культурно-информационный центр
Москва, Москва, Таганский район
Николоямская, 1
Расположение на карте
Пн: 11:00-18:00
Вт: 11:00-18:00
Ср: 11:00-18:00
Чт: 11:00-18:00
Пт: 11:00-18:00
www.domek.ru
Facebook:
https://facebook.com/jewishbookhouse
Название и адрес
Режим работы
Контактная информация
Телефон
Библиотека-музей истории микрорайона №11 им. И.П.Склярова
Нижегородская область, Арзамас городской округ, Арзамас, 11-й микрорайон
11-й микрорайон, 22
Расположение на карте
санитарный день: последний чт месяца
Пн: 10:00-14:00 15:00-19:00
Вт: 10:00-14:00 15:00-19:00
Ср: 10:00-14:00 15:00-19:00
Чт: 10:00-14:00 15:00-19:00
Пт: 10:00-14:00 15:00-19:00
Вс: 10:00-14:00 15:00-19:00
odinnadz.blogspot.ru
Название и адрес
Режим работы
Контактная информация
Телефон
Центральная городская библиотека им. В.И. Ленина
Нижегородская область, Нижний Новгород городской округ, Нижний Новгород, Нижегородский район, Медвежья Долина м-н
Родионова, 165 к3
Расположение на карте
санитарный день: 30 число месяца
Пн: 11:00-19:00
Вт: 11:00-19:00
Ср: 11:00-19:00
Чт: 11:00-19:00
Пт: 11:00-19:00
Сб: 11:00-17:00
www.gorbibl.nnov.ru
Название и адрес
Режим работы
Контактная информация
Телефон
Воронежская областная универсальная научная библиотека им. И.С. Никитина
Воронежская область, Воронеж городской округ, Воронеж, Ленинский район
Ленина площадь, 2
Расположение на карте
санитарный день: последняя ср месяца; июль-август: пн-сб 9:00-18:00; вс выходной
Пн: 09:00-20:00
Вт: 09:00-20:00
Ср: 09:00-20:00
Чт: 09:00-20:00
Сб: 12:00-20:00
Вс: 12:00-20:00
www.vrnlib.ru
Вконтакте:
https://vk.com/vounb
Facebook:
https://facebook.com/vounb
Название и адрес
Режим работы
Контактная информация
Телефон
Новомосковская библиотечная система, МБУК
Тульская область, Новомосковск городской округ, пос. Правда
Центральная, 6
Расположение на карте
санитарный день: последний день месяца
Пн: 09:00-13:00 14:00-17:00
Вт: 09:00-13:00 14:00-17:00
Ср: 09:00-13:00 14:00-17:00
Чт: 09:00-13:00 14:00-17:00
Пт: 09:00-13:00 14:00-17:00
nmosk-lib.ru
Вконтакте:
https://vk.com/club76870112
Название и адрес
Режим работы
Контактная информация
Телефон
Библиотека №10
Саратовская область, Саратов городской округ, Саратов, 3-й Дачный
Международная, 2
Расположение на карте
технический день: последняя пт месяца
Вт: 10:00-20:00
Ср: 10:00-20:00
Чт: 10:00-20:00
Пт: 10:00-20:00
Сб: 10:00-20:00
Название и адрес
Режим работы
Контактная информация
Телефон
Иниго, библиотека
Новосибирская область, Новосибирск городской округ, Новосибирск, Центральный район
Максима Горького, 94
Расположение на карте
Вт: 11:00-19:00
Ср: 11:00-19:00
Чт: 11:00-19:00
Пт: 11:00-19:00
Сб: 11:00-19:00
www.inigocenter.ru
Вконтакте:
https://vk.com/public32208335
Инстаграм:
https://instagram.com/kultura_inigo
Facebook:
https://facebook.com/inigo.nsk
Название и адрес
Режим работы
Контактная информация
Телефон
санитарный день: последний день месяца
Вт: 12:00-19:00
Ср: 12:00-19:00
Чт: 12:00-19:00
Пт: 12:00-19:00
Сб: 12:00-17:00
Название и адрес
Режим работы
Контактная информация
Телефон
Детская библиотека пос. Медведево
Республика Марий Эл, Медведевский район, пгт Медведево
Шумелёва, 7
Расположение на карте
Пн: 09:00-18:00
Вт: 09:00-18:00
Ср: 09:00-18:00
Чт: 09:00-18:00
Пт: 09:00-18:00
Сб: 09:00-15:00
Наличие в библиотеках
Название и адрес
Режим работы
Контактная информация
Телефон
санитарный день: последний рабочий день месяца
Вт: 09:00-13:00 14:30-18:30
Ср: 09:00-13:00 14:30-18:30
Чт: 09:00-13:00 14:30-18:30
Пт: 09:00-13:00 14:30-18:30
Сб: 09:00-13:00 14:30-18:30
Название и адрес
Режим работы
Контактная информация
Телефон
Дом еврейской книги, культурно-информационный центр
Москва, Москва, Таганский район
Николоямская, 1
Расположение на карте
Пн: 11:00-18:00
Вт: 11:00-18:00
Ср: 11:00-18:00
Чт: 11:00-18:00
Пт: 11:00-18:00
www.domek.ru
Facebook:
https://facebook.com/jewishbookhouse
Название и адрес
Режим работы
Контактная информация
Телефон
Библиотека-музей истории микрорайона №11 им. И.П.Склярова
Нижегородская область, Арзамас городской округ, Арзамас, 11-й микрорайон
11-й микрорайон, 22
Расположение на карте
санитарный день: последний чт месяца
Пн: 10:00-14:00 15:00-19:00
Вт: 10:00-14:00 15:00-19:00
Ср: 10:00-14:00 15:00-19:00
Чт: 10:00-14:00 15:00-19:00
Пт: 10:00-14:00 15:00-19:00
Вс: 10:00-14:00 15:00-19:00
odinnadz.blogspot.ru
Название и адрес
Режим работы
Контактная информация
Телефон
Центральная городская библиотека им. В.И. Ленина
Нижегородская область, Нижний Новгород городской округ, Нижний Новгород, Нижегородский район, Медвежья Долина м-н
Родионова, 165 к3
Расположение на карте
санитарный день: 30 число месяца
Пн: 11:00-19:00
Вт: 11:00-19:00
Ср: 11:00-19:00
Чт: 11:00-19:00
Пт: 11:00-19:00
Сб: 11:00-17:00
www.gorbibl.nnov.ru
Название и адрес
Режим работы
Контактная информация
Телефон
Воронежская областная универсальная научная библиотека им. И.С. Никитина
Воронежская область, Воронеж городской округ, Воронеж, Ленинский район
Ленина площадь, 2
Расположение на карте
санитарный день: последняя ср месяца; июль-август: пн-сб 9:00-18:00; вс выходной
Пн: 09:00-20:00
Вт: 09:00-20:00
Ср: 09:00-20:00
Чт: 09:00-20:00
Сб: 12:00-20:00
Вс: 12:00-20:00
www.vrnlib.ru
Вконтакте:
https://vk.com/vounb
Facebook:
https://facebook.com/vounb
Название и адрес
Режим работы
Контактная информация
Телефон
Новомосковская библиотечная система, МБУК
Тульская область, Новомосковск городской округ, пос. Правда
Центральная, 6
Расположение на карте
санитарный день: последний день месяца
Пн: 09:00-13:00 14:00-17:00
Вт: 09:00-13:00 14:00-17:00
Ср: 09:00-13:00 14:00-17:00
Чт: 09:00-13:00 14:00-17:00
Пт: 09:00-13:00 14:00-17:00
nmosk-lib.ru
Вконтакте:
https://vk.com/club76870112
Название и адрес
Режим работы
Контактная информация
Телефон
Библиотека №10
Саратовская область, Саратов городской округ, Саратов, 3-й Дачный
Международная, 2
Расположение на карте
технический день: последняя пт месяца
Вт: 10:00-20:00
Ср: 10:00-20:00
Чт: 10:00-20:00
Пт: 10:00-20:00
Сб: 10:00-20:00
Название и адрес
Режим работы
Контактная информация
Телефон
Иниго, библиотека
Новосибирская область, Новосибирск городской округ, Новосибирск, Центральный район
Максима Горького, 94
Расположение на карте
Вт: 11:00-19:00
Ср: 11:00-19:00
Чт: 11:00-19:00
Пт: 11:00-19:00
Сб: 11:00-19:00
www.inigocenter.ru
Вконтакте:
https://vk.com/public32208335
Инстаграм:
https://instagram.com/kultura_inigo
Facebook:
https://facebook.com/inigo.nsk
Название и адрес
Режим работы
Контактная информация
Телефон
санитарный день: последний день месяца
Вт: 12:00-19:00
Ср: 12:00-19:00
Чт: 12:00-19:00
Пт: 12:00-19:00
Сб: 12:00-17:00
Название и адрес
Режим работы
Контактная информация
Телефон
Детская библиотека пос. Медведево
Республика Марий Эл, Медведевский район, пгт Медведево
Шумелёва, 7
Расположение на карте
Пн: 09:00-18:00
Вт: 09:00-18:00
Ср: 09:00-18:00
Чт: 09:00-18:00
Пт: 09:00-18:00
Сб: 09:00-15:00
Информация от пользователей
Методическое пособие по исполнительным механизма автоматизации — файл n1.docx
приобрести
Методическое пособие по исполнительным механизма автоматизации
скачать (17815.2 kb.)
Доступные файлы (1):
- Смотрите также:
- Макаренко В.Г. Схемы автоматизации. Учебно-методическое пособие к курсовому и дипломному проектированию (Документ)
- Методическое пособие — Системы и устройства судовой автоматики: схемотехника средств автоматизации (Документ)
- Леонтьев Ю.П. (сост.) Расчет механизма подъема (Документ)
- И. А. Соловьев лабораторные работы по “фотонике” (Ч. 1).». Методическое пособие ташкент 2019 Настоящее методическое пособие включает в себя описание 4-х лабораторны (Документ)
- Лобов Б.Н. Методическое пособие по проектированию установочных автоматических выключателей (Документ)
- Расчетно-графическая работа (Документ)
- Курсовой проект — Расчет механизма козлового крана (Курсовая)
- РМ4-2-96. Схемы автоматизации. Указания по выполнению. Пособие к ГОСТ 21.408-93 (Документ)
- Аникина В.П., Воеводина А.А. и др. Политология в схемах и таблицах. Методическое пособие (Документ)
- Фертиков В.В. Распределенные приложения: контроллеры автоматизации. Часть 2 (Документ)
- Расчет механизма подъема крана выбор кинематической схемы (Документ)
- Анализ технического задания структурный анализ механизма 3 Кинематический анализ механизма 8 (Документ)
n1.docx
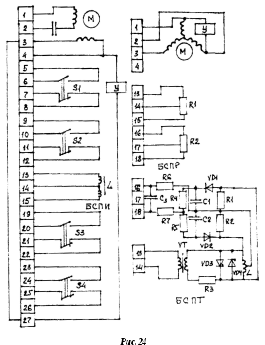
Управление ИМ серии МЭО осуществляется на бесконтактных элементах с помощью магнитных усилителей и контактное – при помощи реверсивных магнитных пускателей. Для привода исполнительных механизмов используют малоинерционные двухфазные асинхронные двигатели типа ДАУ или асинхронные трёхфазные типа 4А.
Для осуществления обратной связи и дистанционного указания выходного вала служат следующие узлы:
1. Блок БСПИ-10, состоящий из двух индуктивных датчиков, четырёх микропереключателей, кулачков, рычагов и элементов настройки. Блок БСПИ применяется с бесконтактными регулирующими приборами.
2. Блок БСПР-10, состоящий из двух реостатных датчиков (по 120 Ом) и четырёх микропереключателей.
3. Блок БСПТ-10, состоящий из токового датчика и четырёх микропереключателей.
Принципиальная схема механизма показана на рис.24.
В связи с большим количеством модификаций исполнительных механизмов типа МЭО их технические характеристики в данном пособии не приводятся.
![]()
3.3. Исполните механизмы переменной скорости
Электрические исполнительные механизмы переменной скорости используют в системах автоматики непрерывного действия. Сигнал управления через управляющее устройство непрерывного действия плавно изменяет скорость перестановки исполнительного органа механизма. Сейчас широко применяют исполнительные механизмы с бесконтактным управлением (БИМ, МЭК и др.), так как они наиболее полно отвечают современным требованиям. В таких исполнительных механизмах используют двух– и трёхфазные асинхронные двигатели, частота вращения которых изменяется регулированием подведенного напряжения переменного тока; в качестве бесконтактных управляющих устройств – магнитные усилители.
В системах автоматического регулирования исполнительные механизмы типа БИМ применяются с бесконтактными регуляторами типа БР-11 и БР-21, а также измерительными устройствами, имеющими реостатные датчики с R=120300 Ом.
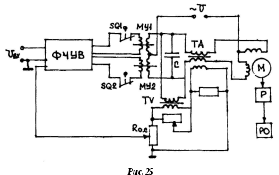
Рассмотрим схему бесконтактного управления исполнительными механизмами переменной скорости с двухфазным асинхронным двигателем (рис.25).
![]() В управляющую часть схемы входят фазочувствительный управляемый выпрямитель ФЧУВ, магнитные усилители МУ1 и МУ2 и цепь обратной связи по частоте вращения вала исполнительного двигателя, использующая косвенный метод измерения вращения путём введения положительной обратной связи по току от трансформатора тока ТА и отрицательной обратной связи по напряжению от трансформатора напряжения TV. Рабочие обмотки усилителей включают последовательно с обмотками двухфазного асинхронного двигателя. Вращение двигателя через редуктор передаётся к регулирующему органу. В зависимости от значения и фазы управляющего сигнала переменного тока UВХ изменяются токи в выходных цепях ФЧУВ, а следовательно, сопротивление рабочих обмоток МУ. Если при одной фазе управляющего сигнала открывается МУ1 и запирается МУ2, то при изменении фазы сигнала на 180° запирается МУ1 и открывается МУ2. При этом асинхронный двигатель реверсируется. Если UBX = 0, то МУ1 и МУ2 не подмагничены и двигатель неподвижен.
В управляющую часть схемы входят фазочувствительный управляемый выпрямитель ФЧУВ, магнитные усилители МУ1 и МУ2 и цепь обратной связи по частоте вращения вала исполнительного двигателя, использующая косвенный метод измерения вращения путём введения положительной обратной связи по току от трансформатора тока ТА и отрицательной обратной связи по напряжению от трансформатора напряжения TV. Рабочие обмотки усилителей включают последовательно с обмотками двухфазного асинхронного двигателя. Вращение двигателя через редуктор передаётся к регулирующему органу. В зависимости от значения и фазы управляющего сигнала переменного тока UВХ изменяются токи в выходных цепях ФЧУВ, а следовательно, сопротивление рабочих обмоток МУ. Если при одной фазе управляющего сигнала открывается МУ1 и запирается МУ2, то при изменении фазы сигнала на 180° запирается МУ1 и открывается МУ2. При этом асинхронный двигатель реверсируется. Если UBX = 0, то МУ1 и МУ2 не подмагничены и двигатель неподвижен.
Для расширения диапазона пропорциональной зависимости между частотой вращения двигателя и управляющим сигналом используют отрицательную обратную связь. Коэффициент пропорциональности определяется значением обратной связи в зависимости от положения движка делителя напряжения сопротивления Ro.cю. Конечные выключатели SQ1 и SQ2 , включённые в цепях управления магнитных усилителей, обеспечивают остановку двигателя при подходе регулирующего органа к крайним положениям.
Основные характеристики исполнительных механизмов типа БИМ
Таблица 3.7.
| Тип исполнительного механизма | Рн, Вт | nС, об/мин | Мн, Н·м | ip | ТС, сек |
| Бим с двухфазным асинхронным двигателем | 60 | 1500 | 80 | 5400 | 120 |
| Бим с трехфазным асинхронным двигателем | 150 | 1500 | 300 | 2700 | 120 |
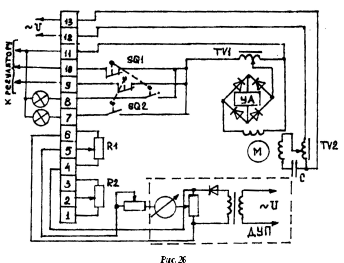
Исполнительные механизмы типов МЭК-К и МЭК-Б, предназначены для использования в автоматических системах с контактным и бесконтактным управлением, Принципиальная электрическая схема механизма МЭК-К представлена на рис.26. В механизме используются малоинерционный двухфазный асинхронный двигатель с полым ротором типа АДП. Наличие двух обмоток позволяет изменением напряжения на обмотке управления плавно изменять скорость вращения выходного вала исполнительного механизма. Автотрансформаторы TV1 и TV2 ![]() применяются для понижения сетевого напряжения до напряжения 110 ± 10 В на обмотке возбуждения и 115 ± 10 В на обмотке управления.
применяются для понижения сетевого напряжения до напряжения 110 ± 10 В на обмотке возбуждения и 115 ± 10 В на обмотке управления.
Конечные выключатели SQ1 и SQ2 предназначены для остановки двигателя в крайних положениях. R1 предназначен для указания положения вала исполнительного механизма; R2 — для обратной связи с регулятором. С целью уменьшения выбега выходного вала в механизме применён электромагнитный тормоз, питаемый от выпрямителя. Управление двигателем осуществляется магнитным пускателем типа ПКР.
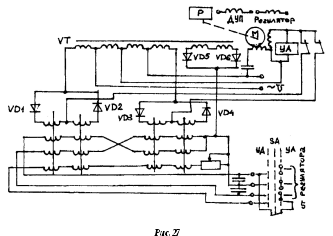
В исполнительных механизмах типа МЭК-Б используется двухфазный асинхронный двигатель, который получает питание от двухтактных магнитных усилителей с внутренней положительной обратной связью. В схему исполнительного механизма (рис.27) входят: двухтактный дифференциальный магнитный усилитель с выходом на переменном токе; дистанционное УД или автоматическое УА управление через командо–аппарат SA ; конечные выключатели SQ1 и SQ2 — для ограничения угла поворота выходного вала двигателя; индуктивный датчик указателя ДУП; индуктивный датчик обратной связи с регулятором; электромагнитный тормоз УА.
![]() Технические данные исполнительных механизмов типа МЭК-К и МЭК-Б
Технические данные исполнительных механизмов типа МЭК-К и МЭК-Б
Таблица 3.8.
| Тип | Мн, Н·м | Мп, Н·м | ТС, сек | Uп, В | Рн. Вт | RО.С., Ом |
| МЭК-ЮК-120
МЭК-ЮБ-120 МЭК-25К-120 МЭК-25Б-120 МЭК-2К-360 МЭК-2Б-360 МЭК-ЮК-360 МЭК-ЮБ-360 |
100
100 250 250 250 250 100 100 |
150
150 375 375 375 375 150 150 |
120
120 120 120 360 360 360 360 |
127/220
220 127/220 220 127/220 220 127/220 220 |
180
280 275 280 275 280 180 280 |
120
– 120 – 120 – 120 – |
Многооборотные электрические исполнительные механизмы постоянной скорости типа МЭМ предназначены для привода запорной и регулирующей аппаратуры в системах автоматического регулирования и дистанционного управления. Механизм состоит из исполнительного двигателя; муфты предельного момента, отключающей электродвигатель при перегрузках; конечных выключателей, ограничивающих перемещение механизма в крайних положениях; потенциометров для дистанционного указания и обратной связи с регулятором.
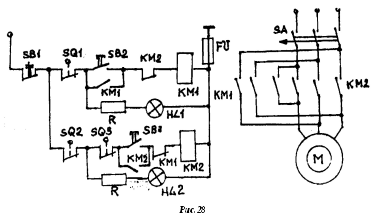
Схема дистанционного управления исполнительным механизмом запорного устройства показана на рис.28.
В момент подачи командного импульса от кнопок дистанционного управления SB2 и SB3 подаётся питание на соответствующую катушку реверсивного магнитного пускателя. Пускатель остаётся включённым через собственный блокировочный контакт (КМ1.КМ2) и контакт конечного выключателя SQ1 и SQ2. При достижении запорным органом положения полного открытия или закрытия, соответствующий конечный выключатель разрывает цепь питания катушки магнитного пускателя, Для предотвращения одновременного включения катушек предусмотрена электрическая блокировка. При случайном заклинивании запорного органа в промежуточном положении отключение электродвигателя осуществляется контактом SQ3 муфты пре![]() дельного момента.
дельного момента.
Технические данные исполнительных механизмов типа МЭМ
Таблица 3.9.
| Тип | UH, В | РН, Вт | МН, Н·м | ТС, сек |
| МЭМ-10/1
МЭМ-1 0/2,5 МЭМ-10/6,3 |
220/380 | 600
400 120 |
100
100 100 |
1
2,5 6,3 |
4. Электромагнитные исполнительные механизмы
Электромагнитные исполнительные механизмы по сравнению с электродвигательными обладают небольшой мощностью, но при этом отличаются простотой конструкции, несложными схемами управления, высокой надёжностью. Характерная особенность таких механизмов заключается в том, что они могут быть применены только в схемах двухпозиционного управления, т.е. когда регулирующий орган может находится в двух конечных положениях.
Электромагнитные механизмы способны работать как на постоянном, так и на переменном токе, но у электромагнитов постоянного тока лучше характеристики, поскольку при одинаковых размерах они развивают большее тяговое усилие.
В настоящее время наибольшее распространение получили электромагнитные приводы серии ЭВ, предназначенные для управления различными клапанами, вентилями .задвижками. Электромагнитные приводы серии ЭВ по принципу действия можно разделить на две группы:
1) электромагнитные приводы ЭВ-1 и ЭВ-2, рассчитанные на длительное обтекание их катушек током. При подаче напряжения на катушку электромагнита его якорь втягивается, открывая вентиль. К недостаткам следует отнести постоянное потребление энергии при открытом положении РО и возможность произвольного переключения РО при исчезновении напряжения. Электромагнитные приводы этой серии работают от сети постоянного тока напряжением 110 и 220 В и от сети переменного тока напряжением 127, 220 и 380 В;
2) электромагнитные приводы типа ЭВ-3, рассчитаны на кратковременный режим работы. Они состоят из двух электромагнитов: главного, служащего для открытия РО, и электромагнита защёлки, удерживающей РО в открытом положении. Катушки обоих электромагнитов находятся под током только в момент переключения РО. При подаче питания на катушку главного электромагнита его якорь втягивается, РО открывается и удерживается в открытом положении защёлкой, что даёт возможность при достижении РО положения полного открытия разрывать цепь питания катушки главного электромагнита конечным выключателем. Для закрытия РО следует подать питание на катушку электромагнита защёлки, который сработав, уберёт защёлку, освободив РО; последний под действием собственной массы или возвратной пружины закроется и с помощью конечных выключателей отключит электромагнит защёлки.
Катушки главного электромагнита и электромагнита защёлки привода ЭВ-3 состоят из двух секций, рассчитанных на питание от сети постоянного тока напряжением 110 В, а при последовательном соединении — 220 В. При работе от сети переменного тока в цепи питания привода включают выпрямители.
На рис.29 показана схема позиционного автоматического регулирования с использованием выпрямителя с электромагнитным приводом и защёлкой. Позиционный регулирующий прибор в зависимости от действительного значения регулируемого параметра даёт команды на открытие или закрытие соленоидного вентиля. При замыкании контакта SM («меньше») через выпрямитель VD и блокировочный контакт S включается реле времени КТ, которое своим контактом КТ замыкает цепь питания от выпрямителя катушку главного тягового электромагнита УА, При этом якорь главного электромагнита, жёстко связанный со штоком вентиля, перемещается и вентиль открывается. Однако размыкающиеся с замедлением контакты реле времени КТ разрывают цепь питания катушки главного электромагнита только через некоторое время. Этого замедления вполне достаточно, чтобы привод вентиля в открытом положении встал на защёлку и не приводил к перегреву катушек главного электромагнита.
При замыкании контакта Sб («больше») регулирующего устройства через блокировочный контакт S2 получает питание катушка электромагнита защёлки УА1, и вентиль закрывается.
![]() 5. Пневматические и гидравлические
5. Пневматические и гидравлические
исполнительные механизмы.
5.1. Общая характеристика пневматических и гидравлических исполнительных механизмов.
Пневматические и гидравлические ИМ, также как и электрические, широко применяются в системах автоматизации технологических процессов. Особенно большое применение пневматические и гидравлические ИМ в настоящее время получили в пожаро–взрывоопасных производствах.
Пневматические исполнительные механизмы используют энергию сжатого воздуха или газа. Основные достоинства их следующие:
- простота осуществления реверса;
- возможность управления по заданной программе;
- возможность применения стандартных узлов и механизмов;
- большая дистанционность работы;
- не требуются особые конструктивные особенности по отводу отработанной среды;
- при появлении небольших утечек рабочей среды практически отсутствуют отклонения от нормального функционирования пневмопровода.
Недостатками пневматических исполнительных механизмов являются:
- необходимость вспомогательного источника энергии для выработки требуемой мощности;
- выполнение специальных мероприятий по очистке и осушке воздуха;
- для поддержания постоянства давления требуется применение ресиверов;
- недостаточная надёжность при низких и повышенных окружающих температурах;
- непостоянство скорости перемещения выходного вала исполнительного механизма по его ходу;
- низкий общий КПД пневматических исполнительных механизмов.
Средний КПД пневмодвигателей 0,30,35, а при нарушении нормального режима падает до 0,1.
Гидравлические ИМ, использующие в качестве рабочей среды масло, имеют следующие достоинства:
- лёгкость осуществления бесступенчатого регулирования скорости;
- надёжность в работе;
- возможность работы при отрицательной (до — 40 °С) и повышенной температуре (до + 50 С) окружающей среды;
- получение больших перестановочных усилий и мощностей при малых габаритах;
- возможность частых и быстрых переключений;
- отсутствие необходимости смазки механизмов;
- высокий КПД и быстродействие.
К недостаткам масляных систем относят:
- необходимость строгой герметичности системы, т.к. утечка масла приводит к ненормальной работе механизмов;
- небольшая дистанционность работы.
В зависимости от характера использования в ИМ энергии рабочей среды пневматические и гидравлические исполнительные механизмы разделяются на две категории:
1. Объёмные исполнительные механизмы, в которых используется давление рабочей среды.
2. Динамические исполнительные механизмы, в которых используется кинематическая энергия движущегося воздуха, газа или жидкости.
В зависимости от характера движения, которое осуществляет выходной вал двигателя исполнительного механизма, пневматические и гидравлические исполнительные механизмы можно разделить на две большие группы:
1. Исполнительные механизмы с двигателями поступательного движения (мембранные, сильфонные, плунжерные и поршневые).
2. Исполнительные механизмы с двигателями вращательного движения.
5.2, Гидравлические и пневматические двигатели
Гидравлические и пневматические двигатели преобразуют энергию рабочей среды, находящейся под давлением, в механическую энергию поступательного или вращательного движения. По конструкции и принципу действия между гидравлическими и пневматическими двигателями нет существенного различия. Отличаются они главным образом по быстродействию: жидкости, использующиеся в гидродвигателях, несжимаемы, а воздух или газ в пневмодвигателях — сжимаем,
По конструкции гидро– и пневмодвигатели делятся на двигатели с поступательным движением и двигатели с вращательным движением.
По способу управления гидро– и пневмодвигатели могут быть с дроссельным и объёмным управлением. При дроссельном управлении в качестве управляющих устройств используются золотники, струйные трубки, устройства типа «сопло–заслонка». При объёмном управлении в качестве источников энергии рабочей среды используют насосы или компрессоры.
![]() На рис.30 показан поршневой исполнительный двигатель с золотниковым управлением. Вспомогательной энергией в этом устройстве является воздух или жидкость, нагнетаемая в трубопровод насосом 1 под давлением Р. Это давление поддерживается постоянным стабилизатором давления 2. Входным воздействием привода служит перемещение золотника 3 управляющим устройством 4. Выходным – перемещение штока поршня 5 силового цилиндра 6. Усилие от штока непосредственно передаётся на объект управления. Поршень перемещается в силовом цилиндре, имеющем две полости 7 и 8.
На рис.30 показан поршневой исполнительный двигатель с золотниковым управлением. Вспомогательной энергией в этом устройстве является воздух или жидкость, нагнетаемая в трубопровод насосом 1 под давлением Р. Это давление поддерживается постоянным стабилизатором давления 2. Входным воздействием привода служит перемещение золотника 3 управляющим устройством 4. Выходным – перемещение штока поршня 5 силового цилиндра 6. Усилие от штока непосредственно передаётся на объект управления. Поршень перемещается в силовом цилиндре, имеющем две полости 7 и 8.
Если каналы перекрыты поясками золотника 3, то поршень двигателя (силового цилиндра) неподвижен. При перемещении золотника на величину Хвх в одну камеру двигателя начинает поступать под давлением рабочая среда, а вторая камера соединяется с трубопроводом, которому рабочая среда возвращается к насосу. Давление в камерах двигателя будет различным, и поршень под действием разности давлений начнёт перемещаться. Скорость движения поршня зависит от объёма рабочей среды, поступающей в одну и вытекающем из другой в единицу времени. Этот объём зависит от размера отверстий, через которые протекает рабочая среда при перемещении золотника. Двигатель с двумя камерами развивает практически одинаковое усилие при подаче давления в одну или другую камеру, но направление движения изменяется на противоположное. Существуют однокамерные двигатели, у которых обратное движение осуществляется под действием возвратной пружины, т.е. рабочий ход у этих двигателей односторонний. Такой двигатель можно рассматривать как усилитель мощности или усилия.
![]() На рис.31 показан лопастной двигатель с управляющим устройством «сопло–заслонка». Подвижной частью двигателя является выходной вал 3 с лопастью 5, разделяющий корпус двигателя на две камеры 4 и 6. Давление в камерах одинаковое при нейтральном положении заслонки 7 по отношению к соплам 8 и 9, через которые происходит частичное истечение рабочей среды в атмосферу (рабочая среда – воздух) либо в магистраль слива (рабочая среда – жидкость).
На рис.31 показан лопастной двигатель с управляющим устройством «сопло–заслонка». Подвижной частью двигателя является выходной вал 3 с лопастью 5, разделяющий корпус двигателя на две камеры 4 и 6. Давление в камерах одинаковое при нейтральном положении заслонки 7 по отношению к соплам 8 и 9, через которые происходит частичное истечение рабочей среды в атмосферу (рабочая среда – воздух) либо в магистраль слива (рабочая среда – жидкость).
![]() Усилия, действующие со стороны сопел на заслонку, взаимно компенсируются, и для перемещения заслонки не требуется большего усилия, При одинаковом давлении P1 = P2 рабочей среды в камерах 4 и 6 лопасть и выходной вал двигателя неподвижны. Перемещение заслонки от управляющего устройства 1 на величину хВХ вызовет нарушение равенства давлений в камерах двигателями лопасть вместе с выходным валом двигателя начнут поворачиваться со скоростью, пропорциональной разности давлений в камерах, а следовательно, смещению заслонки. Угол поворота выходного вала такого двигателя меньше 360°.
Усилия, действующие со стороны сопел на заслонку, взаимно компенсируются, и для перемещения заслонки не требуется большего усилия, При одинаковом давлении P1 = P2 рабочей среды в камерах 4 и 6 лопасть и выходной вал двигателя неподвижны. Перемещение заслонки от управляющего устройства 1 на величину хВХ вызовет нарушение равенства давлений в камерах двигателями лопасть вместе с выходным валом двигателя начнут поворачиваться со скоростью, пропорциональной разности давлений в камерах, а следовательно, смещению заслонки. Угол поворота выходного вала такого двигателя меньше 360°.
На рис.32 показан поршневой поворотный двигатель с управлением от струйной трубки. Двигатель имеет один поршень, но конструктивно разделенный на две части 2 и 5, связанные между собой жёстко с помощью зубчатой рейки 3. С рейкой находится в зацеплении зубчатое колесо 4, вал которого и является выходным валом двигателя. Из струйной трубки 7
рабочая среда выходит под давлением, причём сила реакции струи направлена по оси вращения трубки и для поворота последней не требуется больших усилий. Если трубка 7 расположена симметрично относительно приёмных сопел 6 и 8, то в обеих камерах силового цилиндра 1 устанавливаются одинаковые давления, и поршень с рейкой и зубчатое колесо будут неподвижны. При повороте трубки струя будет по разному располагаться по отношению к соплам, давление в камерах двигателя станет различным, поршень начнёт перемещаться и поворачивать выходное зубчатое колесо и вал, Угол поворота выходного вала у этого двигателя больше 360°, если рейка имеет достаточную длину.
На рис.33.1 показан мембранный двигатель с управлением от игольчатого клапана. Такие двигатели применяют в тех случаях, когда требуется небольшая выходная мощность и небольшое перемещение (до 50 мм).
![]() Упругая мембрана 1 под действием рабочей среды, поступающей в камеру 2, прогибается и передаёт движение на шток 3, связанный с объектом управления. Управление двигателем осуществляется от игольчатого клапана. Изменение положения головки иглы 4 изменяет количество рабочей среды, поступающей из магистрали 6 в отводную 5. При этом изменяется давление в камере двигателя и происходит прогиб мембраны, Для управления перемещением золотников, заслонок, струйных трубок в устройствах гидро– пневмопровода часто используют силовые электромагниты, электродвигатели малой мощности, которые являются исполнительными элементами электрических устройств автоматического управления, Такой привод называется комбинированным – электрогидравлическим или электропневматическим – и сочетает в себе достоинства как электрических, так и гидравлических пневматических устройств автоматики.
Упругая мембрана 1 под действием рабочей среды, поступающей в камеру 2, прогибается и передаёт движение на шток 3, связанный с объектом управления. Управление двигателем осуществляется от игольчатого клапана. Изменение положения головки иглы 4 изменяет количество рабочей среды, поступающей из магистрали 6 в отводную 5. При этом изменяется давление в камере двигателя и происходит прогиб мембраны, Для управления перемещением золотников, заслонок, струйных трубок в устройствах гидро– пневмопровода часто используют силовые электромагниты, электродвигатели малой мощности, которые являются исполнительными элементами электрических устройств автоматического управления, Такой привод называется комбинированным – электрогидравлическим или электропневматическим – и сочетает в себе достоинства как электрических, так и гидравлических пневматических устройств автоматики.
5.3. Исполнительные механизмы с двигателями поступательного и вращательного движения.
![]() В мембранном исполнительном механизме (рис.33.2) силовым элементом является резино–тканевая мембрана. Эти механизмы просты в устройстве, изготовлении и эксплуатации. Обладают сравнительно высоким быстродействием и применяются для привода регулирующих и смесительных клапанов для жидкости и газов, когда для работы регулирующего органа не требуется больших перемещений.
В мембранном исполнительном механизме (рис.33.2) силовым элементом является резино–тканевая мембрана. Эти механизмы просты в устройстве, изготовлении и эксплуатации. Обладают сравнительно высоким быстродействием и применяются для привода регулирующих и смесительных клапанов для жидкости и газов, когда для работы регулирующего органа не требуется больших перемещений.
Недостатки мембранных ИМ:
- не могут применятся при больших давлениях среды из-за непрочности мембраны;
- имеют небольшой ход;
- тяговое усилие из-за изменения эффективной площади мембраны не постоянно.
Мембранные исполнительные механизмы разделяются: по количеству силовых органов – на одномембранные, двухмембранные и четырёхмембранные; по особенностям схемы – на исполнительные механизмы одностороннего (рис.33.2.а) и двухстороннего действия (рис.33.2.б); по виду движения выходного вала – на исполнительные механизмы поступательного и вращательного движения.
В исполнительных механизмах в большинстве случаев применяются мембраны с жёстким центром, причём диаметр обжимных дисков выбирается равным d=0,8D, где D — рабочий диаметр мембраны.
Усилие, развиваемое мембранным исполнительным механизмом с плоской мембраной равно:
а) для беспружинных мембранных исполнительных механизмов
Р = Р·FЭФ·- РТР = (Р2 – Р1)·FЭФ – FТР;
б) для исполнительных механизмов с пружинами
Р = (Р2 – Р1)·FЭФ·- РТР РПР,
где FЭФ – эффективная площадь мембраны;
(Р2 – P1) – разность давлений по обе стороны мембраны (для исполнительных механизмов с пружинами; Р1 – атмосферное давление);
Ртр – сумма сил сопротивления движению вследствие трения в механизме;
РПР = с · h — сила сопротивления пружины.
Для среднего положения мембраны (когда все точки мембраны лежат в одной плоскости) их эффективные площади могут быть определены:
для мембран с жёстким центром
 ;
;
для мембран без жёсткого центра
 .
.
Как видно, при одинаковых диаметрах FЭФ мембран с жёстким центром получаются значительно большие, чем у мембран без жёсткого центра. Поэтому при одних и тех же развиваемых тяговых усилиях, исполнительные механизмы с мембранами с жёстким центром имеют меньшие габариты и вес, чем исполнительные механизмы с мембранами без жёсткого центра.
Постоянная времени для пневматических мембранных исполнительных механизмов определяется:
 ,
,
где dC – диаметр сечения подводящего трубопровода;
V – скорость движения сжатого воздуха.
![]() В последнее время в некоторых системах автоматизации начинают применяться сильфонные исполнительные механизмы. Эти механизмы перспективны в тех случаях, когда для управления приводным механизмом требуется небольшое перестановочное усилие при небольшом ходе ведущего звена. В сильфонном исполнительном механизме силовым элементом является гофрированная трубка–сильфон. На рис.34 приведены типовые схемы сильфонных исполнительных механизмов с подачей давления во внутреннюю (рис.34.а) и наружную (рис.34.б) полость сильфона.
В последнее время в некоторых системах автоматизации начинают применяться сильфонные исполнительные механизмы. Эти механизмы перспективны в тех случаях, когда для управления приводным механизмом требуется небольшое перестановочное усилие при небольшом ходе ведущего звена. В сильфонном исполнительном механизме силовым элементом является гофрированная трубка–сильфон. На рис.34 приведены типовые схемы сильфонных исполнительных механизмов с подачей давления во внутреннюю (рис.34.а) и наружную (рис.34.б) полость сильфона.
Преимущества сильфонных ИМ заключаются в небольших габаритах, простоте конструкции, обладают высоким быстродействием и постоянством развиваемого усилия на выходном штоке вследствие неизменности эффективной площади сильфона.
Усилие, развиваемое сильфонным приводом, определяется по формуле:
Р = Р · FЭФ — РТР — РПР – РС= (Р2 — Р1) · FЭФ — РТР — РПР – РС,
где (Р2 — Р2) – разность давлений, действующих по обе стороны днища сильфона;
FЭФ – эффективная площадь сильфона;
РТР, РПР, РС – силы сопротивления вследствие трения в механизме, действие пружины и упругости самого сильфона.
Эффективная площадь сильфонов определяется:
 ,
,
где DCP – средний диаметр сильфона, равный  ;
;
(DНАР, DВН – соответственно, наружный и внутренний диаметры сильфона).
Поршневые исполнительные механизмы могут использовать большое давление рабочей среды, имеют большие перестановочные усилия на выходном штоке и его большой ход. Поршневые пневматические и гидравлические приводы по количеству силовых органов могут выполнятся одно–, двух– и четырёхпоршневыми;
по конструктивной схеме – одностороннего действия (с пружиной) и двухстороннего действия (без пружины);
по схеме действия привода – исполнительные поршневые механизмы поступательного действия с односторонним или двухсторонним штоком, исполнительные механизмы, сообщающие приводному органу вращательное движение.
Усилие, развиваемое прямоходным приводом, определяется для приводов с двухсторонней подачей давления (рис.35.а):
 ;
;
для приводов с пружинами (рис.356):
 ,
,
где РС – сумма сил сопротивления привода вследствие трения;
РПР = с·h – сила, развиваемая пружиной;
РАТ – атмосферное давление;
Р1,Р2 – избыточные давления по обе стороны поршня;
D – диаметр поршня;
![]() d – диаметр штока.
d – диаметр штока.
Скорость движения выходного штока гидравлического исполнительного механизма при полностью открытом проходном сечении золотника постоянна по ходу поршня и может быть определена как
 ,
,
где Q – расход среды в цилиндре привода;
F – эффективная площадь поршня.
Для пневматических поршневых исполнительных механизмов скорости движения выходных штоков могут быть определены после интегрирования следующих дифференциальных уравнений:
а) для приводов с двухсторонней подачей давления
 ;
;
б) для приводов с односторонней подачей давления
 ,
,
где m – масса деталей, участвующих в движении вместе с поршнем, включая 1/3 массы пружины;
x – путь поршня;
F -площадь поршня;
F1 — площадь сечения штока;
РАТ — атмосферное давление;
Р1, Р2 — разность давлений, действующих на поршень;
РС — сумма сил сопротивления движению привода;
с — жёсткость пружины;
РПР — сила предварительного натяжения пружины (до начала движения поршня).
![]() По конструкции и принципу действия плунжерные исполнительные механизмы похожи на поршневые исполнительные механизмы. Но в отличие от поршневых, в которых рабочее давление действует только на торцевую поверхность поршня, в плунжерных – давление среды действует как на торцевую, так и на боковую поверхности плунжера. Так же, как и поршневые механизмы, плунжерные ИМ бывают как одностороннего действия (рис.36.а), так и двухстороннего (рис.36.б).
По конструкции и принципу действия плунжерные исполнительные механизмы похожи на поршневые исполнительные механизмы. Но в отличие от поршневых, в которых рабочее давление действует только на торцевую поверхность поршня, в плунжерных – давление среды действует как на торцевую, так и на боковую поверхности плунжера. Так же, как и поршневые механизмы, плунжерные ИМ бывают как одностороннего действия (рис.36.а), так и двухстороннего (рис.36.б).
Первые осуществляют поступательное движение приводного органа, вторые – поступательное и вращательное.
Тяговое усилие и крутящий момент плунжерных исполнительных механизмов определяют следующим образом:
– для плунжерных исполнительных механизмов одностороннего действия
 ;
;
– для плунжерных исполнительных механизмов двухстороннего действия
 ,
,
где  – суммарный момент сопротивления при перемещении плунжера;
– суммарный момент сопротивления при перемещении плунжера;
Р0 – рабочее давление в цилиндре;
РПР – усилие сжатия пружины;
РТР – усилие трения;
l – длина поворотного рычага исполнительного механизма;
– угол повороти рычага;
d – диаметр плунжера.
Исполнительные механизмы с вращающейся лопастью осуществляют вращательное движение приводного органа без дополнительных преобразующих устройств, а также имеют постоянство крутящих моментов по ходу механизма.
![]() В этом виде привода (рис.37) неподвижным элементом является цилиндрический корпус, подвижным – лопасть, которая при работе вращается на оси, расположенной в центре корпуса.
В этом виде привода (рис.37) неподвижным элементом является цилиндрический корпус, подвижным – лопасть, которая при работе вращается на оси, расположенной в центре корпуса.
Для определения величины крутящего момента на валу приведём некоторые предварительные расчёты. Определим суммарное усилие на лопасть:
3.1. Исполнительные
механизмы позиционного регулирования
К таким
механизмам относятся механизмы типа
ДР-М, ДР-1М, ИМ-2/2,5 и ИМТ-4/2,5.
Исполнительный
механизм двухпозиционного регулирования
типа ДР представляет собой нереверсивный
асинхронный двигатель с редуктором и
блокирующим устройством, заключённый
в корпус. Исполнительный механизм типа
ДР-1М имеет выходное устройство для
управления поворотными регулирующими
органами; ДР-М может воздействовать как
на поворотный орган, так и на поступательный,
или одновременно на оба.
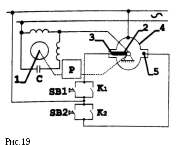 Работа
Работа
исполнительных механизмов осуществляется
следующим образом. Электродвигатель 1
(рис.19) через систему зубчатых колёс
редуктора приводит во вращение вал
исполнительного механизма. Вал редуктора
кинематически связан с ползуном 2
блокирующего устройства. Пусть скользящий
контакт расположен на левом старт —
контакте 3. При этом исполнительный
механизм работает только при включении
управляющего контактаК1.
После начала работы двигателя скользящий
контакт переходит на блокирующую шину
4. Двигатель работает, минуя блок
управления контактов до тех пор, пока
скользящий контакт не перейдёт на правый
5 старт–контакт. В этом случае цепь
двигателя разрывается и регулирующий
орган остановится в крайнем положении.
При замыкании контактаК2вновь замкнётся цепь питания
электродвигателя, и он начинает вращаться
в том же направлении, перемещая через
редуктор регулирующий орган в
противоположную сторону до тех пор,
пока скользящий контакт не сойдёт с
блокирующей шины на старт-контакт 3. При
этом цепь питания электродвигателя
разомкнётся, он остановится, а регулирующий
орган установится в новое крайнее
положение. КонтактыК1иК2включаются блоком
управленияРБУили оператором
кнопочными станциями.
Электрические
исполнительные механизмы типов ИМ-2/2,5
и ИМТ-4/2,5 предназначены для быстрого
перемещения регулирующих органов в
системах позиционного автоматического
регулирования и дистанционного
управления. Они представляют собой
трёхфазные асинхронные реверсивные
двигатели с редукторами и конечными
выключателями кулачкового типа.
Исполнительный механизм типа ИМТ-4/2,5
снабжён также и электромагнитным
тормозом, который прекращает движение
ротора исполнительного двигателя после
отключения его от сети. Схема включения
исполнительного механизма показана на
рис.20. В схемах автоматического
регулирования исполнительные механизмы
типов ММ-2/2.5 и ИМТ-4/2,5 работают следующим
образом.
Таблица
3.1.
|
Основные |
ДР–М |
ДР–1М |
|
Угол |
– |
180 |
|
Величина |
20 |
– |
|
Мощность |
60 |
60 |
|
Частота |
1500 |
1500 |
|
Время |
10, |
60, |
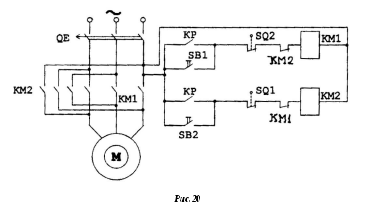 При
При
отклонении регулируемого параметра от
заданного значения в ту или другую
сторону включается один из командных
контактов регулятораКР, замыкая
при этом цепь соответствующей катушки
магнитного пускателяКМ. Электродвигатель
начинает вращаться в таком направлении,
при котором перемещение регулирующего
органа кинематически связанного с
исполнительным механизмом восстанавливает
оптимальное значение регулируемого
параметра. При этом командный контакт
регулятора разомкнётся, магнитный
пускатель отключится и исполнительный
двигатель остановится. В случае
значительного отклонения регулируемого
параметра или большой инерционности
процесса командный контакт регулятора
не разомкнётся, электродвигатель будет
работать до тех пор, пока регулирующий
орган не придёт в крайнее положение. В
этот момент кулачок, связанный с валом
ротора исполнительного двигателя,
разомкнёт контакт конечного выключателяSQ, включённого в цепь соответствующего
магнитного пускателя и двигатель
остановится.
Технические данные электрических
исполнительных механизмов типов ИМ-2/2,5
и ИМТ-4/2,5
Таблица
3.2.
|
Основные |
ИМ-2/2,5 |
ИМТ-4/2,5 |
|
Номинальный |
20,4 |
40,8 |
|
Пусковой |
30,6 |
51 |
|
Рабочий |
Любой |
|
|
Время |
2,5 |
2,5 |
|
Потребляемая |
200 |
600 |
|
Напряжение |
220/380 |
220/380 |
3.2. Исполнительные
механизмы пропорционального регулирования
Исполнительные
механизмы пропорционального регулирования
типов ПР-М и ПР-1М предназначена для
перемещения различных регулирующих
органов в системах автоматического
регулирования, содержащих статический,
астатический или изодромный электрический
регулятор. Кроме этого, эти механизмы
могут быть использованы в схемах
позиционного регулирования и ручного
дистанционного управления.
Исполнительные
механизмы типа ПР состоят из реверсивного
двигателя, редуктора и реостата обратной
связи. Исполнительный механизм ПР-1М
имеет на выходном валу диск и предназначен
для воздействия на поворотный регулирующий
орган. Исполнительный механизм ПР-М
снабжён диском и штоком, поэтому он
может быть применён для воздействия
как поворотный регулирующий орган, так
и на поступательный, или одновременно
на оба.
Схема
исполнительного механизма ПР-1М
представлена на рис.21.
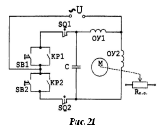 При
При
замыкании контакта регулирующего
устройстваКР1напряжение на одну
из обмотокОУ1двухфазного
исполнительного двигателя подается
непосредственно из сети, а на другуюОУ2через конденсаторС. Двигатель
вращается в одном направлении воздействуя
через редуктор на регулирующий орган.
При замыкании контакта регулирующего
устройстваКР2двигатель реверсируется.
Контакты конечных выключателейSQ1иSQ2включаются последовательно с
соответствующими контактамиКР1иКР2, обеспечивая разрыв цепи питания
двигателя при подходе регулирующего
органа к крайним положениям. КонтактыКР1иКР2включаются с помощью
блока управления,SB1 иSB2—
оператором. В схему включен реостат
обратной связиRО.С. по
положению валаИМ.
Технические
данные электрических исполнительных
механизмов
типа ПР-М и ПР-1М
Таблица 3.3.
|
Основные |
ПР-М |
ПР-1М |
|
Угол |
– |
180 |
|
Величина |
20 |
– |
|
Мощность |
60 |
60 |
|
Сопротивление |
185 |
185 |
|
Частота |
1500 |
1500 |
|
Время |
10; |
 Исполнительный
Исполнительный
механизм пропорционального действия
типа ИМ-2/120 состоит из исполнительного
двухфазного асинхронного двигателя,
шестеренчатого редуктора, узла конечных
выключателей и реостата обратной связи
по положению вала исполнительного
механизма. На рис.22 показана схема
включения ИМ-2/120. Одна из обмоток
двухфазного асинхронного двигателя
(ОУ1илиОУ2) включается контактамиКР1илиКР2релейного блока
управления непосредственно в сеть
переменного тока, а вторая — через
конденсатор С. ДвигательМчерез
редуктор воздействует на регулирующий
орган. Конечные выключателиSQ1иSQ2ограничивают перемещение регулирующего
органа в пределах120°. Для уменьшения
инерционного выбега после отключения
двигателя параллельно контактам включены
резисторыR1иR2.
При отклонении
регулируемого параметра в ту или другую
сторону от заданного значения подвижный
контакт реостатного датчика измерительного
устройства регулятора сместится от
занимаемого им положения в одну или
другую сторону на величину, пропорциональную
величине отклонения регулируемого
параметра. Это вызовет рассогласование
измерительной схемы регулятора и на её
выходе появится напряжение, знак которого
определяется направлением изменения
регулируемого параметра. В зависимости
от знака напряжения, замкнется тот или
иной командный контакт релейного блока
регуляторами двигатель исполнительного
механизма начинает вращаться перемещая
регулирующий орган в сторону увеличения
(уменьшения) значения регулируемой
величины. Одновременно с этим контакт
реостата обратной связи, включенного
в измерительную схему регулятора, начнёт
перемещаться уменьшая сигнал
рассогласования. Когда этот сигнал
будет близок к нулю, двигатель
исполнительного механизма остановится.
Исполнительные
механизмы пропорционального действия
типа ИМТ находят применение в устройствах
пропорционального автоматического
управления, где для перемещения
регулирующих органов требуются
значительные перестановочные усилия.
В этих механизмах используются трёхфазные
асинхронные двигатели переменного
тока. Исполнительные механизмы снабжены
электромагнитным тормозом. Рабочий
угол поворота выходного вала исполнительного
двигателя может быть установлен любым
в пределах 15345°.
Технические
характеристики исполнительных механизмов
типа ИМ-2/120
Таблица
3.4.
|
Основные |
|
|
Номинальный Время Максимальный Потребляемая Сопротивление |
61,2 120 120 26 120 |
Технические данные
исполнительных механизмов типа ИМТ
Таблица
3.5
|
Тип |
Р |
Мн, |
Время оборота, |
Рабочий град. |
RО.С., |
|
ИМТ-60/120 ИМТ-250/120М ИМТ-400/120 ИМТ-250/60 ИМТ-1000/120 ИМТ-400/60 |
180 400 600 600 800 800 |
60 250 250 1000 400 |
120 120 120 60 120 60 |
15345 |
120 |
Механизм
дистанционного управления типа КДУ
применяются как исполнительный механизм
в системах автоматического регулирования
и дистанционного управления.
У исполнительных
механизмов типа КДУ используют трёхфазный
асинхронный двигатель с редуктором,
реверсивный магнитный пускатель с
ключом управления и дистанционным
указателем положения ДУП.
Принципиальная
схема КДУ приведена на рис.23. Ключом
управления КУвключают цепи
трёхфазного реверсивного магнитного
пускателяКМ, обеспечивая требуемое
направление вращения исполнительного
двигателя.
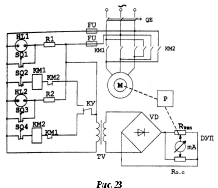 Движок
Движок
резистивного датчика указателя положения
связан с рабочим валом. Резистор указателя
ДУП с сопротивлениемRО.С.образует мостовую измерительную схему,
в диагональ которой включёнmA,
градуированный в процентах от максимального
угла поворота рабочего вала. Для
ограничения угла поворота в КДУ используют
конечные выключателиSQ1SQ4.
ВыключателиSQ1иSQ3служат для
принуждающей сигнализации. При приближении
к крайнему положениюSQ1размыкается
и загорается сигнальная лампаHL1.
Если ключ управления не включён, то
исполнительный механизм продолжает
работу до отключенияSQ2. Теперь
движение исполнительного механизма
возможно при противоположном положении
ключаКУс использованием в цепи
управления выключателейSQ2иSQ4.
В исполнительных
механизмах дистанционного управления
типа КДУ используются несколько
модификаций узлов исполнительного
двигателя с редуктором: РБ, РМ, РБМ.
Назначение
исполнительных однооборотных механизмов
типа МЭО – управление регулирующими
органами в бесконтактных и контактных
системах автоматического регулирования
и дистанционного управления. В механизмах
серии МЭО выходной электрический сигнал
преобразуется с помощью асинхронного
исполнительного двигателя с малоинерционными
ротором и редуктором во вращательное
движение постоянной скорости.
Технические
данные приводов, используемых в механизмах
дистанционного управления типа КДУ
Таблица
3.6.
|
Наименование |
Тип |
||
|
РМ |
РБ |
РБМ |
|
|
Тип |
АОЛ-21-4 |
АОЛ-22-4 |
АОЛ-21-4 |
|
Номинальное |
220/300 |
||
|
Номинальная |
270 |
400 |
2700 |
|
Номинальная |
1400 |
1400 |
1400 |
|
Передаточное |
2800 |
2800 |
1400 |
|
Частота |
0,5 |
0,5 |
1,0 |
|
Максимальный |
250 |
1000 |
250 |
Управление ИМ
серии МЭО осуществляется на бесконтактных
элементах с помощью магнитных усилителей
и контактное – при помощи реверсивных
магнитных пускателей. Для привода
исполнительных механизмов используют
малоинерционные двухфазные асинхронные
двигатели типа ДАУ или асинхронные
трёхфазные типа 4А.
Для осуществления
обратной связи и дистанционного указания
выходного вала служат следующие узлы:
1. Блок БСПИ-10,
состоящий из двух индуктивных датчиков,
четырёх микропереключателей, кулачков,
рычагов и элементов настройки. Блок
БСПИ применяется с бесконтактными
регулирующими приборами.
2. Блок БСПР-10,
состоящий из двух реостатных датчиков
(по 120 Ом) и четырёх микропереключателей.
3. Блок БСПТ-10,
состоящий из токового датчика и четырёх
микропереключателей.
Принципиальная
схема механизма показана на рис.24.
В связи с
большим количеством модификаций
исполнительных механизмов типа МЭО их
технические характеристики в данном
пособии не приводятся.
3.3. Исполните
механизмы переменной скорости
Электрические
исполнительные механизмы переменной
скорости используют в системах автоматики
непрерывного действия. Сигнал управления
через управляющее устройство непрерывного
действия плавно изменяет скорость
перестановки исполнительного органа
механизма. Сейчас широко применяют
исполнительные механизмы с бесконтактным
управлением (БИМ, МЭК и др.), так как они
наиболее полно отвечают современным
требованиям. В таких исполнительных
механизмах используют двух– и трёхфазные
асинхронные двигатели, частота вращения
которых изменяется регулированием
подведенного напряжения переменного
тока; в качестве бесконтактных управляющих
устройств – магнитные усилители.
В системах
автоматического регулирования
исполнительные механизмы типа БИМ
применяются с бесконтактными регуляторами
типа БР-11 и БР-21, а также измерительными
устройствами, имеющими реостатные
датчики с R=120300
Ом.
Рассмотрим
схему бесконтактного управления
исполнительными механизмами переменной
скорости с двухфазным асинхронным
двигателем (рис.25).
 В
В
управляющую часть схемы входят
фазочувствительный управляемый
выпрямитель ФЧУВ, магнитные усилителиМУ1иМУ2и цепь обратной связи
по частоте вращения вала исполнительного
двигателя, использующая косвенный метод
измерения вращения путём введения
положительной обратной связи по току
от трансформатора токаТАи
отрицательной обратной связи по
напряжению от трансформатора напряженияTV. Рабочие обмотки
усилителей включают последовательно
с обмотками двухфазного асинхронного
двигателя. Вращение двигателя через
редуктор передаётся к регулирующему
органу. В зависимости от значения и фазы
управляющего сигнала переменного токаUВХизменяются
токи в выходных цепяхФЧУВ, а
следовательно, сопротивление рабочих
обмотокМУ. Если при одной фазе
управляющего сигнала открываетсяМУ1и запираетсяМУ2, то при изменении
фазы сигнала на180°запираетсяМУ1и открываетсяМУ2. При этом асинхронный
двигатель реверсируется. ЕслиUBX
= 0, тоМУ1иМУ2не подмагничены
и двигатель неподвижен.
Для расширения
диапазона пропорциональной зависимости
между частотой вращения двигателя и
управляющим сигналом используют
отрицательную обратную связь. Коэффициент
пропорциональности определяется
значением обратной связи в зависимости
от положения движка делителя напряжения
сопротивления Ro.cю.
Конечные выключатели SQ1
и SQ2
, включённые в цепях управления магнитных
усилителей, обеспечивают остановку
двигателя при подходе регулирующего
органа к крайним положениям.
Основные
характеристики исполнительных механизмов
типа БИМ
Таблица
3.7.
|
Тип |
Рн, |
nС, |
Мн, |
ip |
ТС, |
|
Бим |
60 |
1500 |
80 |
5400 |
120 |
|
Бим |
150 |
1500 |
300 |
2700 |
120 |
 Исполнительные
Исполнительные
механизмы типов МЭК-К и МЭК-Б, предназначены
для использования в автоматических
системах с контактным и бесконтактным
управлением, Принципиальная электрическая
схема механизма МЭК-К представлена на
рис.26. В механизме используются
малоинерционный двухфазный асинхронный
двигатель с полым ротором типа АДП.
Наличие двух обмоток позволяет изменением
напряжения на обмотке управления плавно
изменять скорость вращения выходного
вала исполнительного механизма.
АвтотрансформаторыTV1иTV2применяются
для понижения сетевого напряжения до
напряжения110 ± 10 Вна обмотке
возбуждения и115 ± 10 Вна обмотке
управления.
Конечные
выключатели SQ1
и SQ2
предназначены для остановки двигателя
в крайних положениях. R1
предназначен для указания положения
вала исполнительного механизма; R2
— для обратной связи с регулятором. С
целью уменьшения выбега выходного вала
в механизме применён электромагнитный
тормоз, питаемый от выпрямителя.
Управление двигателем осуществляется
магнитным пускателем типа ПКР.
В
исполнительных механизмах типа МЭК-Б
используется двухфазный асинхронный
двигатель, который получает питание от
двухтактных магнитных усилителей с
внутренней положительной обратной
связью. В схему исполнительного механизма
(рис.27) входят: двухтактный дифференциальный
магнитный усилитель с выходом на
переменном токе; дистанционное УД
или автоматическое УА
управление через командо–аппарат SA
; конечные выключатели SQ1
и SQ2
— для ограничения угла поворота выходного
вала двигателя; индуктивный датчик
указателя ДУП;
индуктивный датчик обратной связи с
регулятором; электромагнитный тормоз
УА.
 Технические
Технические
данные исполнительных механизмов типа
МЭК-К и МЭК-Б
Таблица
3.8.
|
Тип |
Мн, |
Мп, |
ТС, |
Uп, |
Рн. |
RО.С., |
|
МЭК-ЮК-120 МЭК-ЮБ-120 МЭК-25К-120 МЭК-25Б-120 МЭК-2К-360 МЭК-2Б-360 МЭК-ЮК-360 МЭК-ЮБ-360 |
100 100 250 250 250 250 100 100 |
150 150 375 375 375 375 150 150 |
120 120 120 120 360 360 360 360 |
127/220 220 127/220 220 127/220 220 127/220 220 |
180 280 275 280 275 280 180 280 |
120 – 120 – 120 – 120 – |
Многооборотные
электрические исполнительные механизмы
постоянной скорости типа МЭМ предназначены
для привода запорной и регулирующей
аппаратуры в системах автоматического
регулирования и дистанционного
управления. Механизм состоит из
исполнительного двигателя; муфты
предельного момента, отключающей
электродвигатель при перегрузках;
конечных выключателей, ограничивающих
перемещение механизма в крайних
положениях; потенциометров для
дистанционного указания и обратной
связи с регулятором.
Схема
дистанционного управления исполнительным
механизмом запорного устройства показана
на рис.28.
 В
В
момент подачи командного импульса от
кнопок дистанционного управления SB2
и SB3
подаётся питание на соответствующую
катушку реверсивного магнитного
пускателя. Пускатель остаётся включённым
через собственный блокировочный контакт
(КМ1.КМ2) и контакт конечного выключателя
SQ1
и SQ2.
При достижении запорным органом положения
полного открытия или закрытия,
соответствующий конечный выключатель
разрывает цепь питания катушки магнитного
пускателя, Для предотвращения
одновременного включения катушек
предусмотрена электрическая блокировка.
При случайном заклинивании запорного
органа в промежуточном положении
отключение электродвигателя осуществляется
контактом SQ3
муфты предельного момента.
Технические
данные исполнительных механизмов типа
МЭМ
Таблица
3.9.
|
Тип |
UH, |
РН, |
МН, |
ТС, |
|
МЭМ-10/1 МЭМ-1 МЭМ-10/6,3 |
220/380 |
600 400 120 |
100 100 100 |
1 2,5 6,3 |
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #