Содержание
- 1 Необходимые детали для робота-сумо ev3
- 2 Пошаговая инструкция по сборке
- 3 Коротко о программировании сумо-робота
Для победы в боевых соревнованиях по робототехнике необходимо правильно собрать робота сумо ev3, инструкция по сборке поможет в этом. Результативность обеспечивается задействованием всех функциональных возможностей, включая датчики расстояния, цвета, толкающие и поддевающие ковши. Роботы-участники представлены в базовых и усовершенствованных комплектациях (шагающие, гусеничные боты).

Необходимые детали для робота-сумо ev3
Модели для сумо состоят из следующих блоков и элементов:
- 3 большие шестеренки, скрепленные парой балок для полного привода;
- колеса;
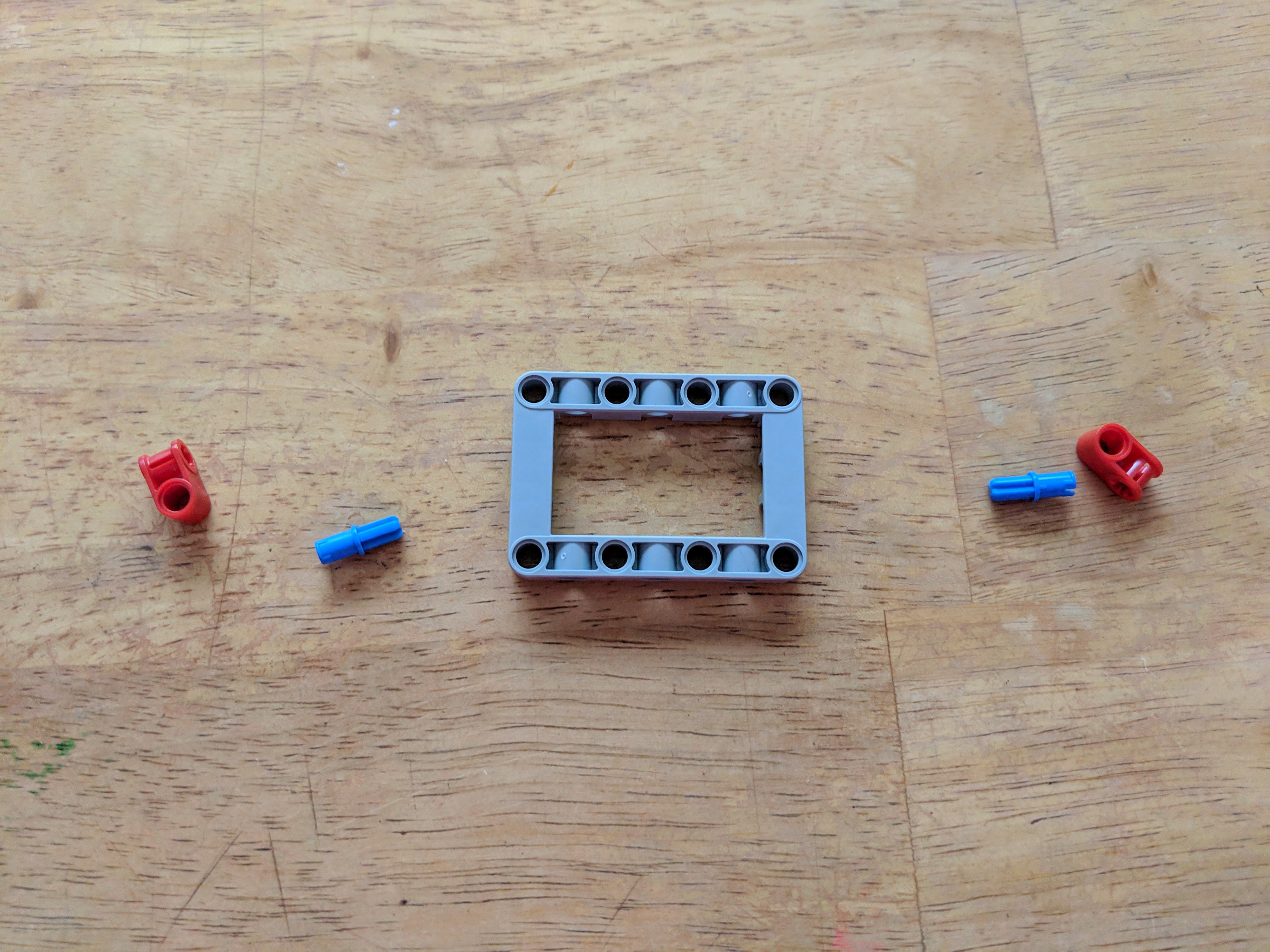
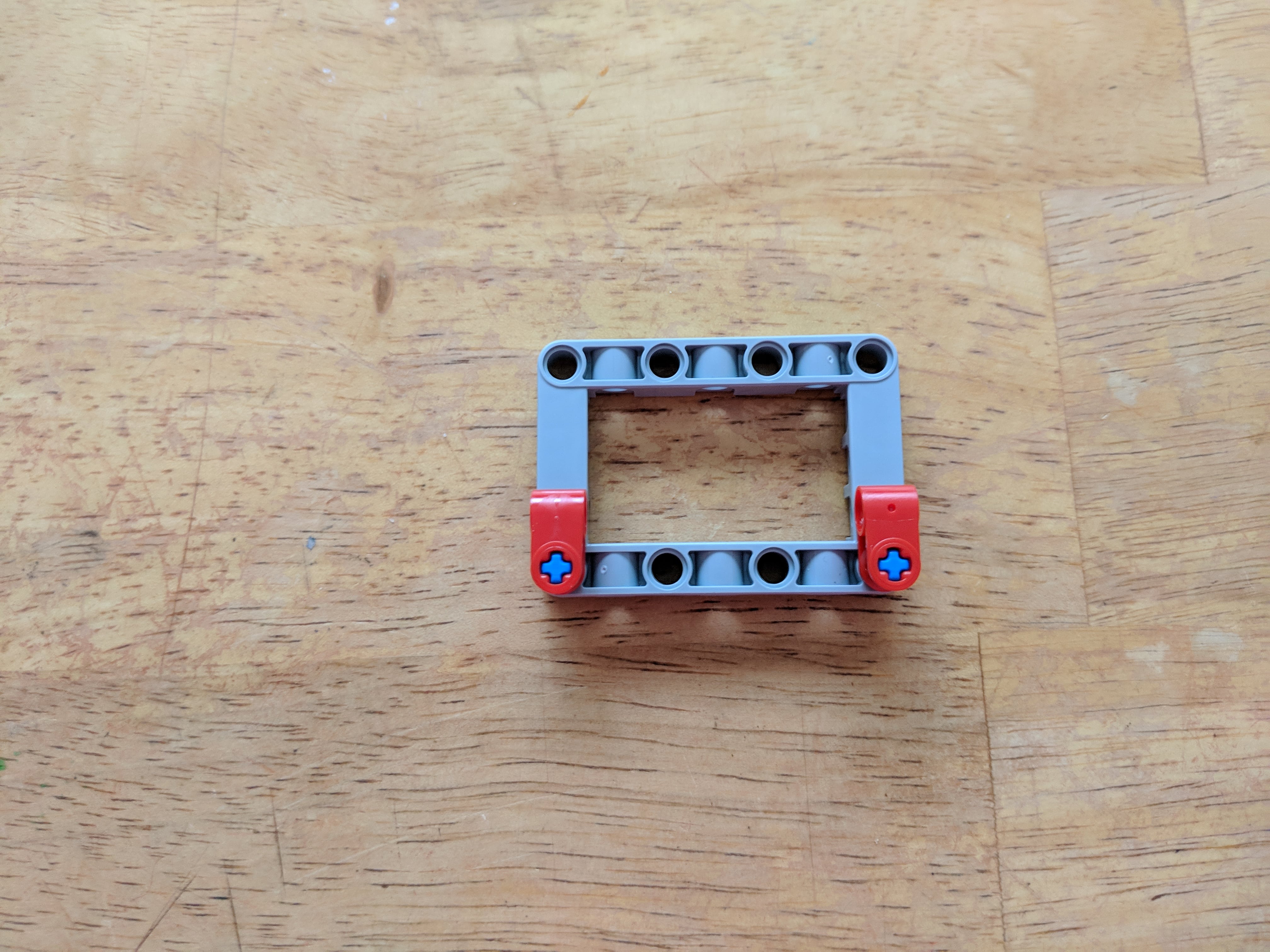
- прямоугольная рамка для размещения боковой платформы;
- поддевающий и распорный ковши;
- моторы;
- датчики и портальные разъемы;
- конструкционные элементы (поперечины, крепеж, направляющие, продольные, диагональные рейки).
Датчики и моторы
Для робота предусмотрено два больших двигателя, подсоединяемые к портам «В» и «С». Движущая конструкция расположена во фронтальной части, моторы вращаются по часовой стрелке.
Полноценное функционирование ev3 невозможно без датчиков. У рассматриваемого конструктора применяется пять основных видов индикаторов:
- Инфракрасный маяк служит для передачи сигналов роботу. Он агрегирует с другими лего-ботами.
- Температурный датчик работает по принципу органов чувств человека и других живых организмов.
- Ультразвуковой индикатор реагирует на соперника, что важно на соревнованиях любого уровня.
- Индикатор цвета расширяет возможности робота, ориентируя его на ринге.
- Датчик касания — самый простой и важный элемент.

Одно состязание робо-сумо состоит из 3-х раундов, общая продолжительность которых составляет 3 минуты.
Программный блок
Стандартное ПО рассчитано на два больших мотора, два датчика (инфракрасный и цветовой). Работает программа по следующей схеме:
- «Ожидание» – 5 секунд.
- «Звуковой сигнал» – начало работы.
- Два цикла «Начало» и «Неограниченный» – старт движения.
- «Определение цвета» – по умолчанию робот видит черный колер; при этом механизм отъезжает на два вращения назад.
- «Управление рулевое» – корректируется количество оборотов.
- Режим «Нет цвета» – ведется расчет имеющихся препятствий, расстояния до них и последующих манипуляций.
- «Инфракрасный индикатор» – действует по принципу распознавания и приближения объектов.
- «Истина» – ветка, которая активируется, если до препятствия менее 60 единиц.
- «Лож» – противоположность восьмой позиции в списке.
- «Независимое управление» – на противоположных мощностях двигателей бот будет вертеться на месте, пока дистанция до соперника не станет менее 60 единиц.
Выставив указанные параметры, проводят тестирование робота ev3 для сумо.
Моторы большой и средний
Основной двигатель серверного типа сделан под NXT с увеличенной корпусной частью. Характеристики:
- оборотистость предельная (об./мин.) — 170;
- заданный/рабочий момент кручения (Н/см) — 40/20;
- индикатор поворотного угла – есть, погрешность – до одного градуса.
Средний сервомотор «ев3» базируется на Power Function, ориентирован на высокие скорости и низкие нагрузки. Параметры:
- максимум оборотов (об./мин.) — 250;
- крутящий момент (Н/см) — 12/8;
- энкодер, отвечающий за угол поворота с точностью до одного градуса.
Новый блок для соревнований настроен универсально, подходит для всех модификаций рассматриваемых конструкций.

Роботы, участвующие в соревнованиях, должны быть автономными и быть собраны только из деталей Lego.
Удаленный инфракрасный маяк
Впереди расположенный датчик излучает волны, невидимые человеческому глазу. Подобным образом работают ДПУ. В режиме «Приближение» индикатор самостоятельно отправляет импульсы, отражая полученный сигнал и фиксируя обнаруженное препятствие.
ИК-маяк может определять дистанцию до соперника, посылая сведения о примерном своем расположении и удаленности. Для использования функции потребуются батарейки типа «ААА».
Датчик цвета и прикосновения
Цветовой индикатор «сумоиста» отличает семь оттенков с возможностью определения отсутствия колера. Дополнительная функция – работа в режиме подсветки.
Опции:
- улавливание красного и его окружающего фона;
- контроль разницы между контрастными оттенками;
- рабочая частота – 1 кГц.
Датчик касания фиксирует активацию или отпускание кнопки, подсчитывает число нажатий.
Инфракрасный сенсор
Этот индикатор позволяет определять не только оттенок, но и степень освещенности, дистанцию до ближайших предметов. В качестве контроллера выступает специальный блок, к которому подсоединяются сопутствующие «движки» и датчики.

Роботы-сумоисты могут иметь различную конфигурацию, однако, они должны соответствовать регламенту соревнований — находиться в пределах назначенного размера и веса.
Пошаговая инструкция по сборке
Собрать мощного робота-сумоиста Lego не сложно, если знать все операции по этапам.
Боевой бот Mindstorms ev3 конструируется следующим образом:
- Собирается передний привод с тремя большими шестернями и обжимной парой длинных балок.
- Крепятся колеса, горизонтальная и вертикальная прямоугольная рамка.
- Цепляется поддевающий ковш.
- Комплектуется вся правая сторона боевого робота для сумо.
- Подсоединяются датчики к моторам посредством проводов и специальных портальных гнезд.
Бота собирают в нескольких базовых исполнениях. Таблица ориентирует пользователей на выбор модели, подходящей для заданных целей, по сравнению с категорией Education.
| Характеристика | NXT | EV3 |
| Основной процессор | ARM AT91-SAM 7S256, Atmel. 48 МГц, «Флеш-память» – 256 кБ, RAM – 64 кБ | ARM9, 300 МГц, Память – 16/64 кБ |
| Вспомогательное ПО | «Восьмибитный» «Амтел», 8 МГц, «Флеш»/«РАМ» – 4,0/0,52 кБ | Не предусмотрено |
| Операционная система | Propietary | Linux |
| Ввод | Четыре гнезда с цифровыми и аналоговыми портами. Скорость – 9600 бит/с | Аналоговые и цифровые разъемы со скоростью 460,8 Кбит/с |
| Вывод | 3 | 4 |
| Передача сведений | Full speed 12 Мбит/с | High speed 480 Мбит/с |
| Способ подключения | Отсутствует | Wi-Fi, Flash (до трех носителей и передатчиков) |
| Чтение карт SD | Нет | miniSD до 32 Гб |
| Совместимость с мобильными девайсами | «Андроид» | «Андроид», iOS |
| Монитор | Монохромный LCD (100×64 Px) | LCD (178×128 Px) |
| Взаимодействие | Bluetooth, USB | Bluetooth 2.1, USB 2.0/1.1, Wi-Fi |
Коротко о программировании сумо-робота
Регламент состязаний предполагает расположение «бойцов» во внутреннем секторе круга. Диаметр арены составляет 1540 мм, черная приграничная окантовка имеет ширину 50 мм. В середине круга предусмотрены две стартовые линии. На них соревнующиеся машины должны выждать 5 секунд до того, как броситься в схватку. В связи с этим секундомер пуска настраивается с соответствующей задержкой.
«Фишка» подобных соревнований заключается в том, что программировать робота «на успех» не получится. Направление движения определяет судья. Во избежание попадания бота в «молоко» используется программа «Цикл» с независимым управлением.
Настройка предполагает создание для мотора «А» предельной скорости перемещения вперед. Соответственно, мотор «В» на гусеницах альтернативно вращается назад. Независимое управление позволяет вращаться конструкции в пределах одной оси.
Пользователь корректирует робота, вращая его на одной точке. В этом помогает инфракрасный датчик, определяющий цель. Используют опцию «Приближение», настроив дистанцию 0,5 м. Рабочий диаметр для сражения ботов составляет по диагонали 1,5 м.
В соответствии с правилами предельное расстояние между соперниками не превышает 1000 мм. Колесо каждого участника не должно заступать за стартовую линию. Уловив цель, индикатор передает сведения на микропроцессор. Включается независимое управление, робот начинает перемещаться вперед и в стороны.
Для того чтобы лего-боец сумо смог уловить направление движения и стратегию ведения борьбы, включается датчик цвета. С его помощью бот доходит до черной черты с последующим включением задней передачи. Если на протяжении одной секунды ситуация остается без изменений, «сумоист» останавливается автоматически.
После настройки всех портов с моторами и датчиками, программа представит собой схему, в которой задействованы два двигателя, индикаторы света и инфракрасного излучения на движение.
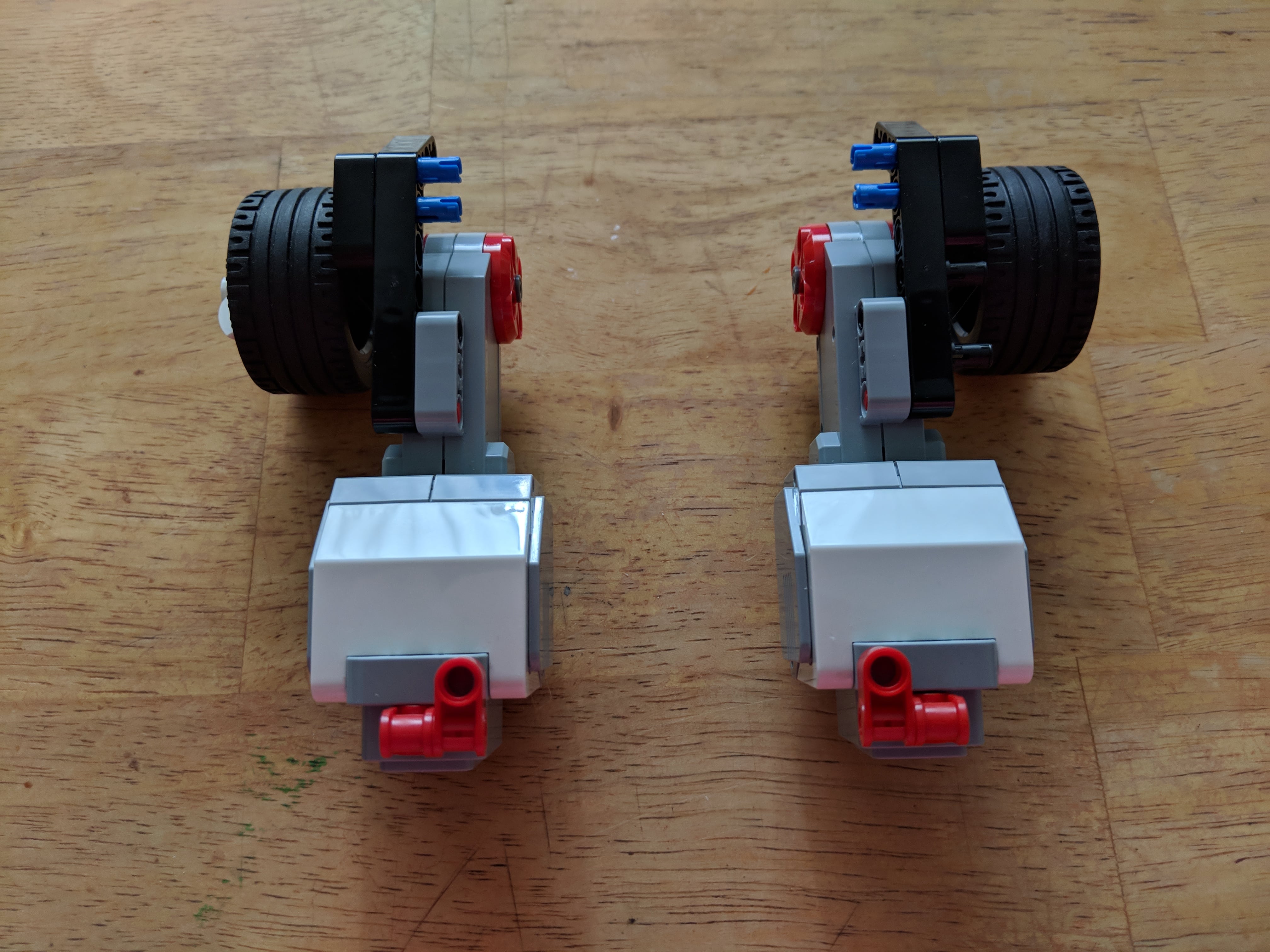
Motor Module
First Motor Assembly




Second Motor Assembly
Build a second motor assembly as a mirror image of the first.
Rear Skid Assembly


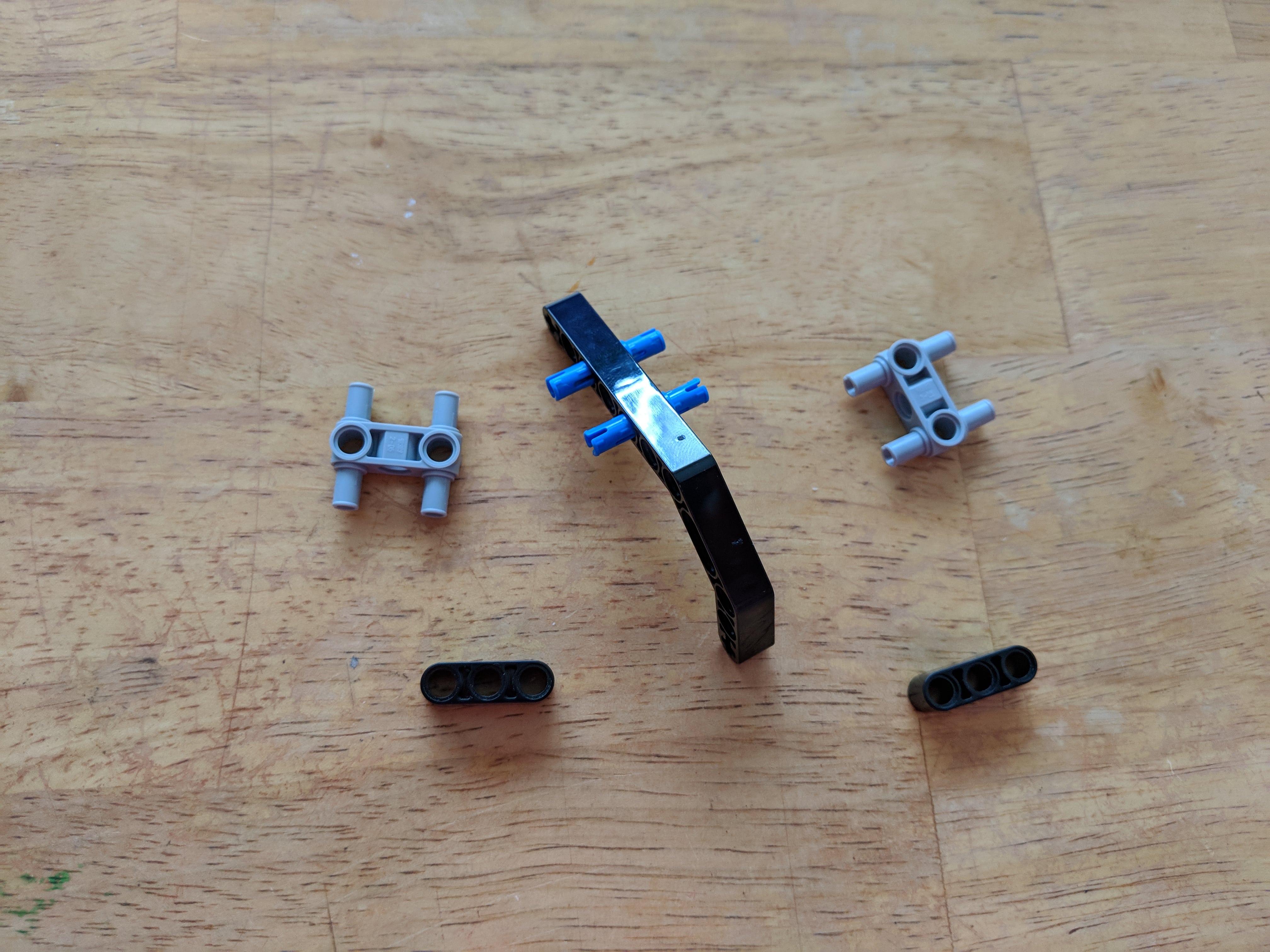
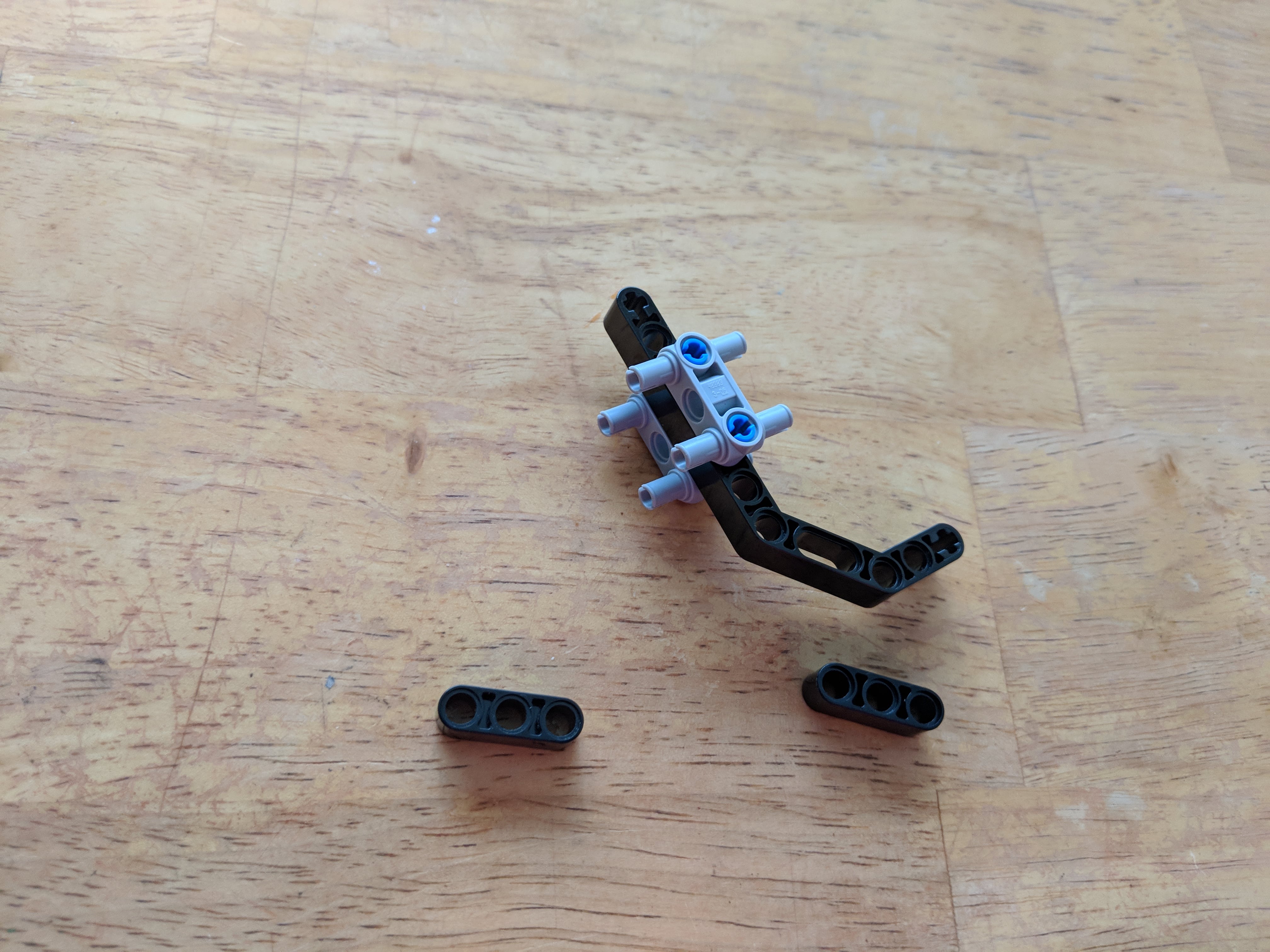

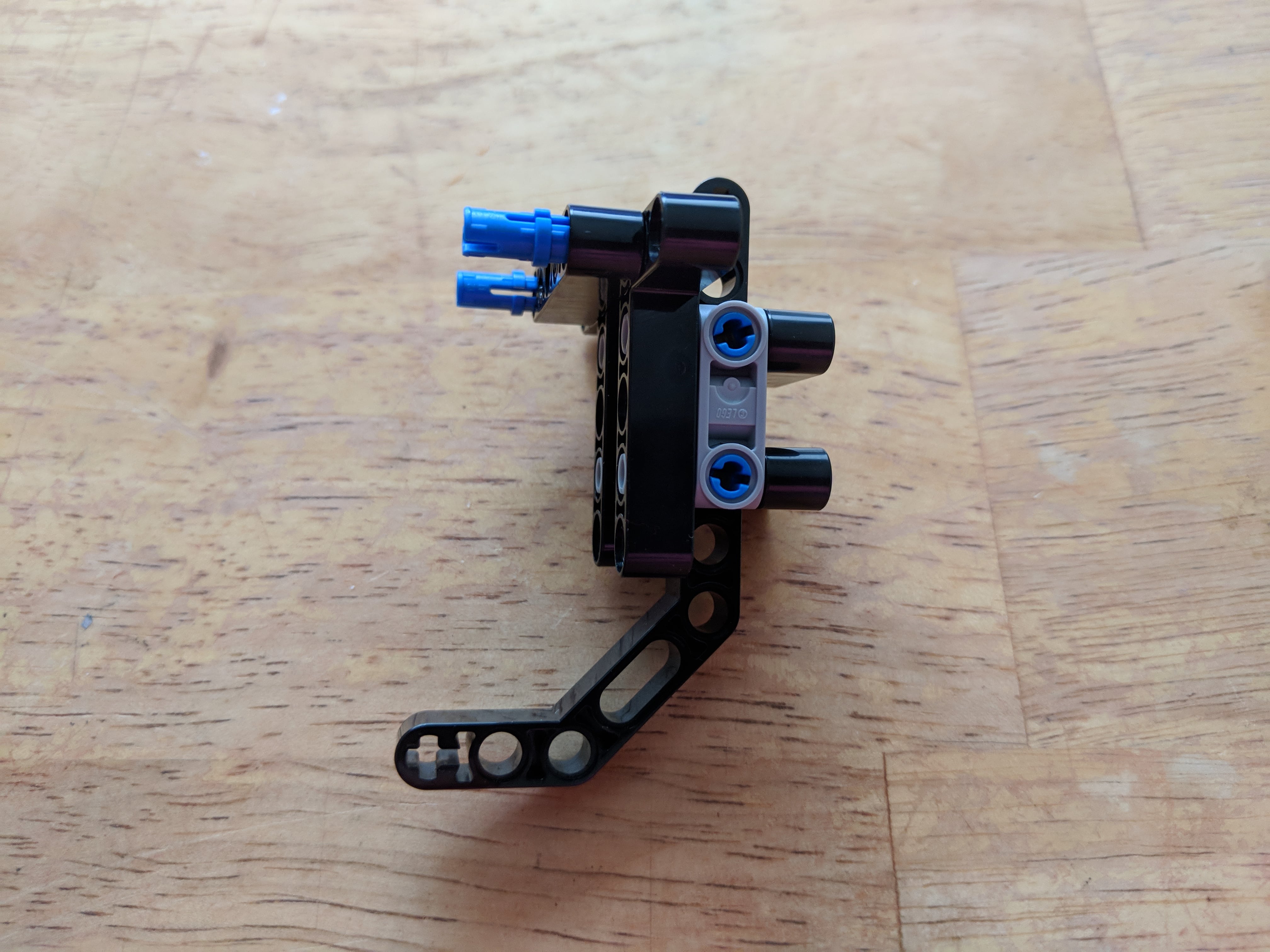
Bumper Assembly
First Bumper Assembly

Second Bumper Assembly
Build a second front bumper as a mirror image of the first.

Touch Sensor Module

Second Touch Sensor
Build a second touch sensor module as a mirror image of the first.
Light Sensor Module
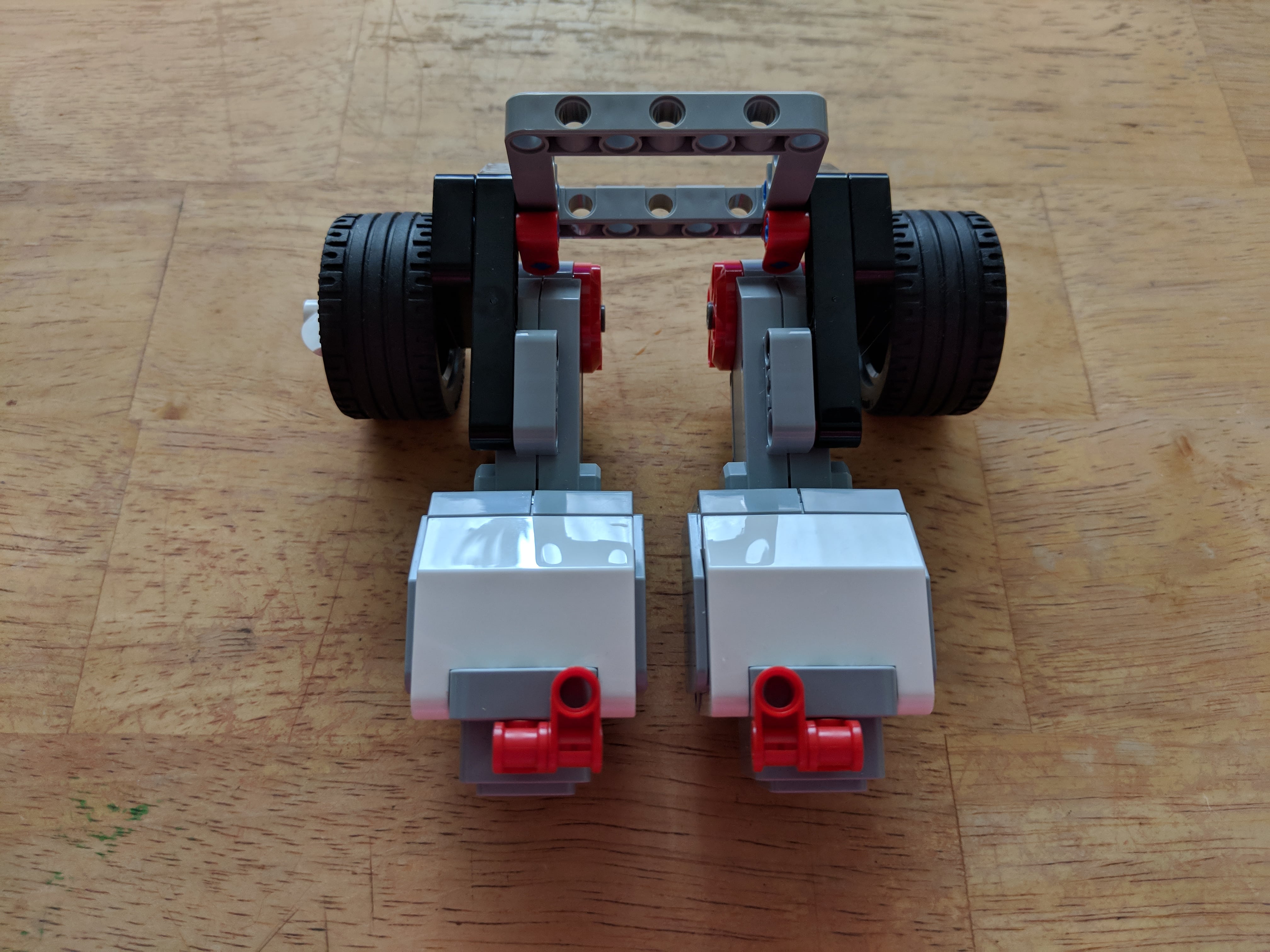
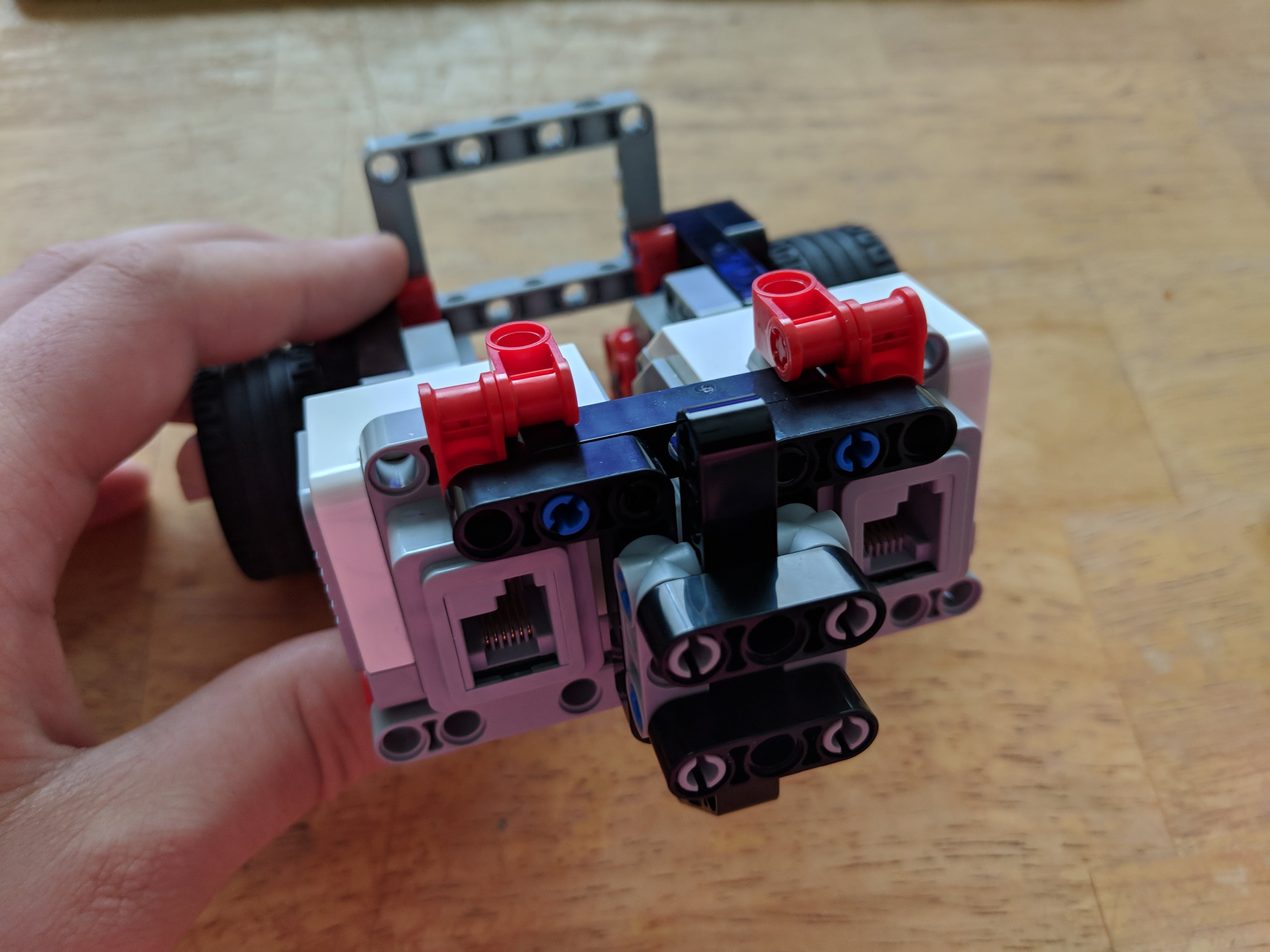
Complete Assembly


Connect the left touch sensor to port 1 and the right touch sensor to port 2.
Note that the wires cross underneath the EV3 brick.
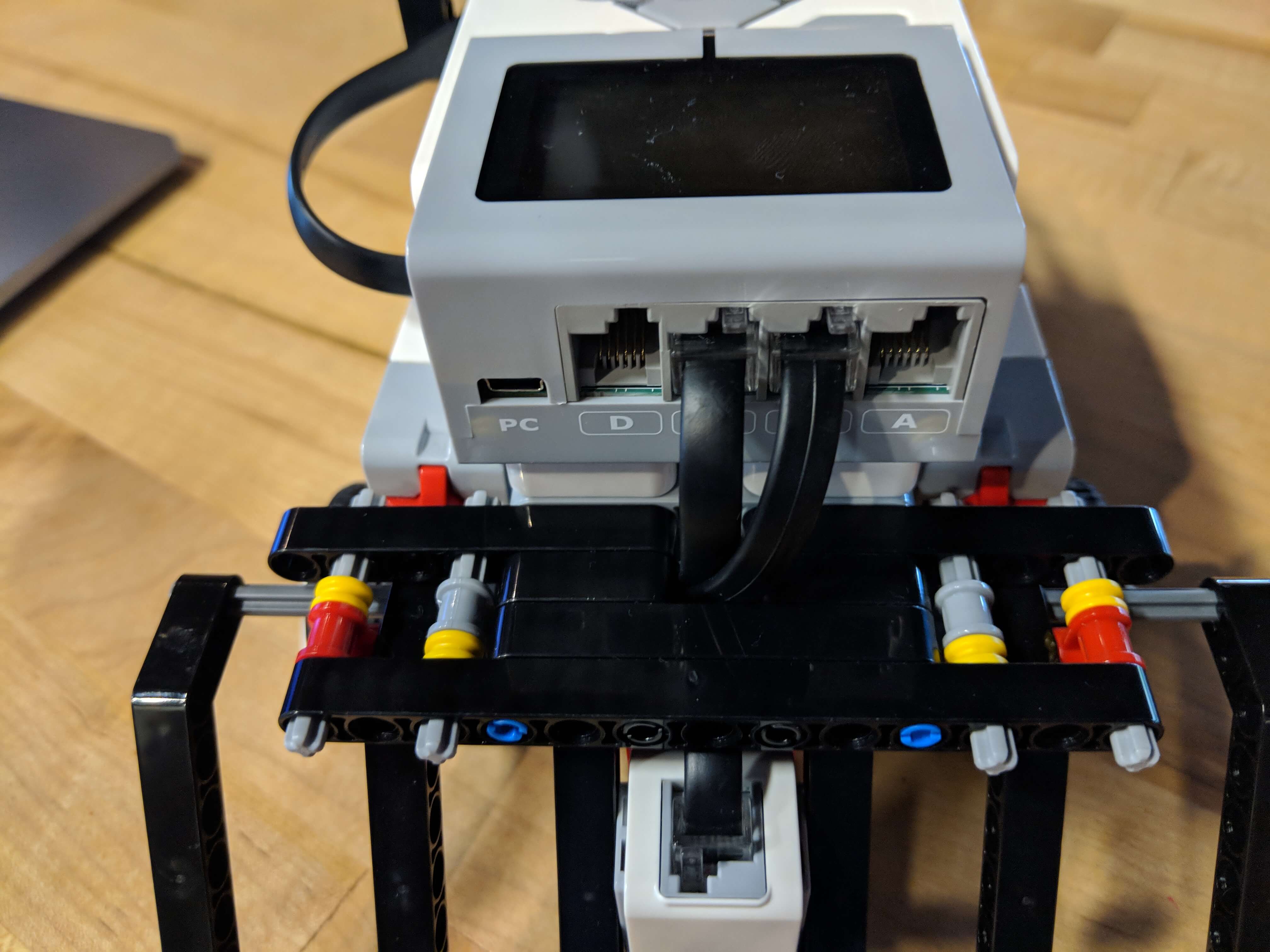
Connect the left motor to port C and the right motor to port B.
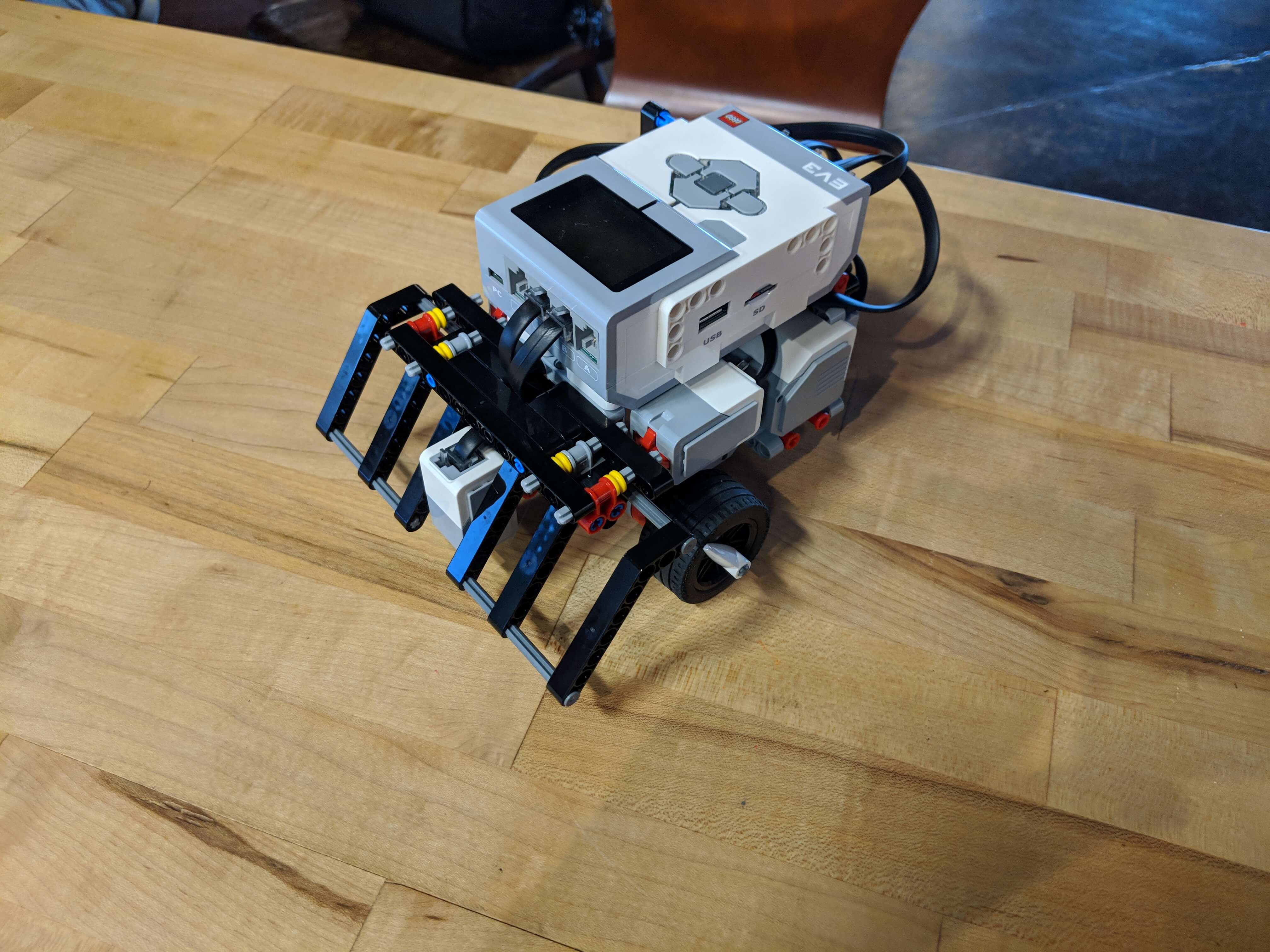
Congratulations
You have completed your EV3 sumo robot.
Введение:
Урок №12 курса «Практика» представляет разбор решения, наверное, самого популярного соревнования роботов — «Сумо». Главная задача робота-сумоиста состоит в том, чтобы вытолкнуть за пределы ринга своего соперника. Существует множество вариантов правил проведения этого состязания, накладывающих различные ограничения в первую очередь на размеры и конструкцию роботов, тем не менее, базовые алгоритмы поведения робота при этом очень похожи. Поэтому наш урок в значительной степени будет направлен на реализацию программы поведения, а в завершающей части урока рассмотрим некоторые советы по практической подготовке к соревнованию роботов.
12.1. Поле для проведения соревнования. Правила соревнования.
Не смотря на то, что соревновательная дисциплина «Сумо» большинством организаторов соревнований позиционируется как состязание, предназначенное для начинающих робототехников, она пользуется неизменным вниманием не только участников, но и зрителей! Соревнования проводятся на двух видах полей: либо белый круг, ограниченный черной окружностью, либо, наоборот, черный круг, ограниченный белой окружностью. Очень часто макет поля наносится на круглый подиум небольшой высоты. В этом случае побежденный робот принуждается к падению (бывает, что с подиума падают оба участника битвы).
Для нашего урока мы возьмем то же самое поле, которое использовали при разборе Урока №11 — «Кегельринг». Это поле представляет собой белый круг, ограниченный черной окружностью. С классическими правилами проведения соревнования «Сумо» по версии Российской ассоциации образовательной робототехники вы можете ознакомиться под спойлером ниже:
Регламент соревнований роботов «Сумо» по версии сайта RAOR.RU
Ссылка на страницу с правилами на сайте RAOR.RU
1. Общие правила
1.1. Робот должен вытолкнуть робота-соперника за черную линию (За пределы поля).
1.2. После начала состязания роботы должны двигаться по направлению друг к другу до столкновения.
1.3. После столкновения роботы должны пытаться контактировать друг с другом.
1.4. Во время проведения состязания участники команд не должны касаться роботов.
1.5. Два автономных робота выставляются на ринг (круглое поле). Роботы пытаются вытолкнуть соперника за пределы ринга.
1.6. Робот, выигравший большее количество раундов, выигрывает матч.
1.7. При игре «каждый с каждым», лучшим считается робот выигравший большее количество матчей.
1.8. При большом количестве участников можно организовывать ранжирование по «олимпийской системе» (на вылет).
2. Робот
2.1. Роботы должны быть построены с использованием только деталей конструкторов ЛЕГО Перворобот (LEGO-Mindstorms)
2.2. Во время всего раунда:
Размер робота не должен превышать 25х25х25см.
Вес робота не должен превышать 1кг.
2.3. Робот, по мнению судий, намерено повреждающий других роботов, или как-либо повреждающий покрытие поля, будет дисквалифицирован на всё время состязаний.
2.4. В конструкции робота строго запрещено использовать:
Клеящие вещества.
2.5. Перед матчем роботы проверяются на габариты и вес.
2.6. Робот может иметь множество программ, из которых оператор может выбирать каждый раунд.
2.7. Между матчами разрешено изменять конструкцию и программы роботов.
3. Поле
3.1. Белый круг диаметром 1 м с чёрной каёмкой толщиной в 5 см.
3.2. В круге, красными полосками отмечены стартовые зоны роботов.
3.3. Красной точкой отмечен центр круга.
3.4. Поле размещено на подиуме высотой 16 мм.
4. Проведение Соревнований
4.1. Соревнования состоят из серии матчей. Матч определяет, из двух участвующих в нём роботов, наиболее сильного. Матч состоит из 3 раундов по 30 секунд. Матч выигрывает робот выигравший большее количество раундов. Судья может использовать дополнительный раунд для разъяснения спорных ситуаций.
4.2. Раунды проводятся подряд.
4.3. В начале раунда роботы выставляются за красными полосами (от центра ринга) в своих стартовых зонах, все касающиеся поля части робота должны находиться внутри стартовой зоны.
4.4. По команде судьи отдаётся сигнал на запуск роботов, при этом операторы роботов должны запустить программу на роботах и отойти от поля более чем на 1 метр в течение 5 секунд. За эти же 5 секунд роботы должны проехать по прямой и столкнуться друг с другом.
4.5. Для начинающих: После столкновения роботы не могут маневрировать по рингу.
4.6. Для опытных: После столкновения роботы могут маневрировать по рингу как угодно.
4.7. Если роботы не сталкиваются в течение 5 секунд после начала раунда, то робот из-за которого, по мнению судьи, не происходит столкновения, считается проигравшим в раунде. Если роботы едут по прямой и не успевают столкнуться за 5 секунд, то робот, находящийся ближе к своей стартовой зоне, считается проигравшим в раунде.
5. Правила отбора победителя
5.1. Если робот не двигается, не находясь в контакте с другим роботом, больше 10 сек, то он считается проигравшим в раунде.
5.2. При касании любой части робота (даже не присоединённой к роботу) за пределы чёрной каёмки, роботу засчитывается проигрыш в раунде.
5.3. Если по окончании раунда ни один робот не будет вытолкнут за пределы круга, то выигравшим раунд считается робот, находящийся ближе всего к центру круга.
5.4. Если победитель не может быть определен способами, описанными выше, решение о победе или переигровке принимает судья состязания.
6. Судейство
6.1. Организаторы оставляют за собой право вносить в правила состязаний любые изменения, если эти изменения не дают преимуществ одной из команд.
6.2. Контроль и подведение итогов осуществляется судейской коллегией в соответствии с приведенными правилами.
6.3. Судьи обладают всеми полномочиями на протяжении всех состязаний; все участники должны подчиняться их решениям.
6.4. Если появляются какие-то возражения относительно судейства, команда имеет право в устном порядке обжаловать решение судей в Оргкомитете не позднее окончания текущего раунда.
6.5. Переигровка может быть проведена по решению судей в случае, когда робот не смог закончить этап из-за постороннего вмешательства, либо когда неисправность возникла по причине плохого состояния игрового поля, либо из-за ошибки, допущенной судейской коллегий.
6.6. Члены команды и руководитель не должны вмешиваться в действия робота своей команды или робота соперника ни физически, ни на расстоянии. Вмешательство ведет к немедленной дисквалификации.
6.7. Судья может закончить состязание по собственному усмотрению, если робот не сможет продолжить движение в течение 10 секунд.
12.2. Конструкция робота для соревнования «Сумо».
Базовое поведение робота в «Сумо» очень похоже на поведение робота в «Кегельринге». Роботу также необходимо найти внутри поля объект и вытолкать его за пределы круга. Различия, как водится, кроятся в деталях: теперь этот объект в свою очередь ищет нашего робота и тоже жаждет вытолкать его поскорее.

Тем не менее — сосредоточимся на своей цели: искать соперника нам по-прежнему будет помогать один из датчиков, способных определять предметы на расстоянии (инфракрасный или ультразвуковой), а своевременно определять черную границу поля будем с помощью датчика цвета. Поэтому для создания и отладки программы робота-сумоиста предлагаем вам использовать того же самого робота, которого мы подготовили для Урока №11 — Кегельринг.
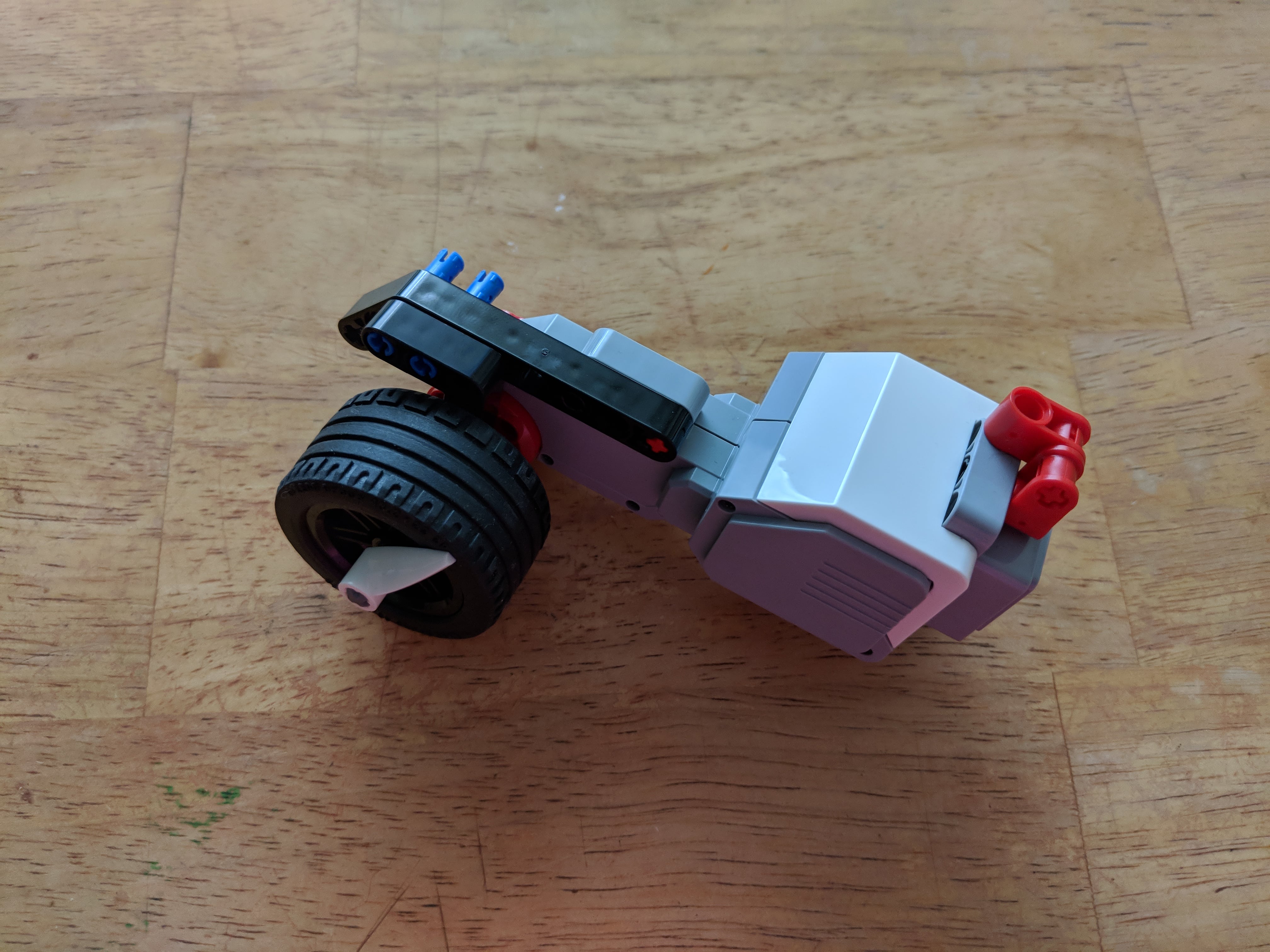
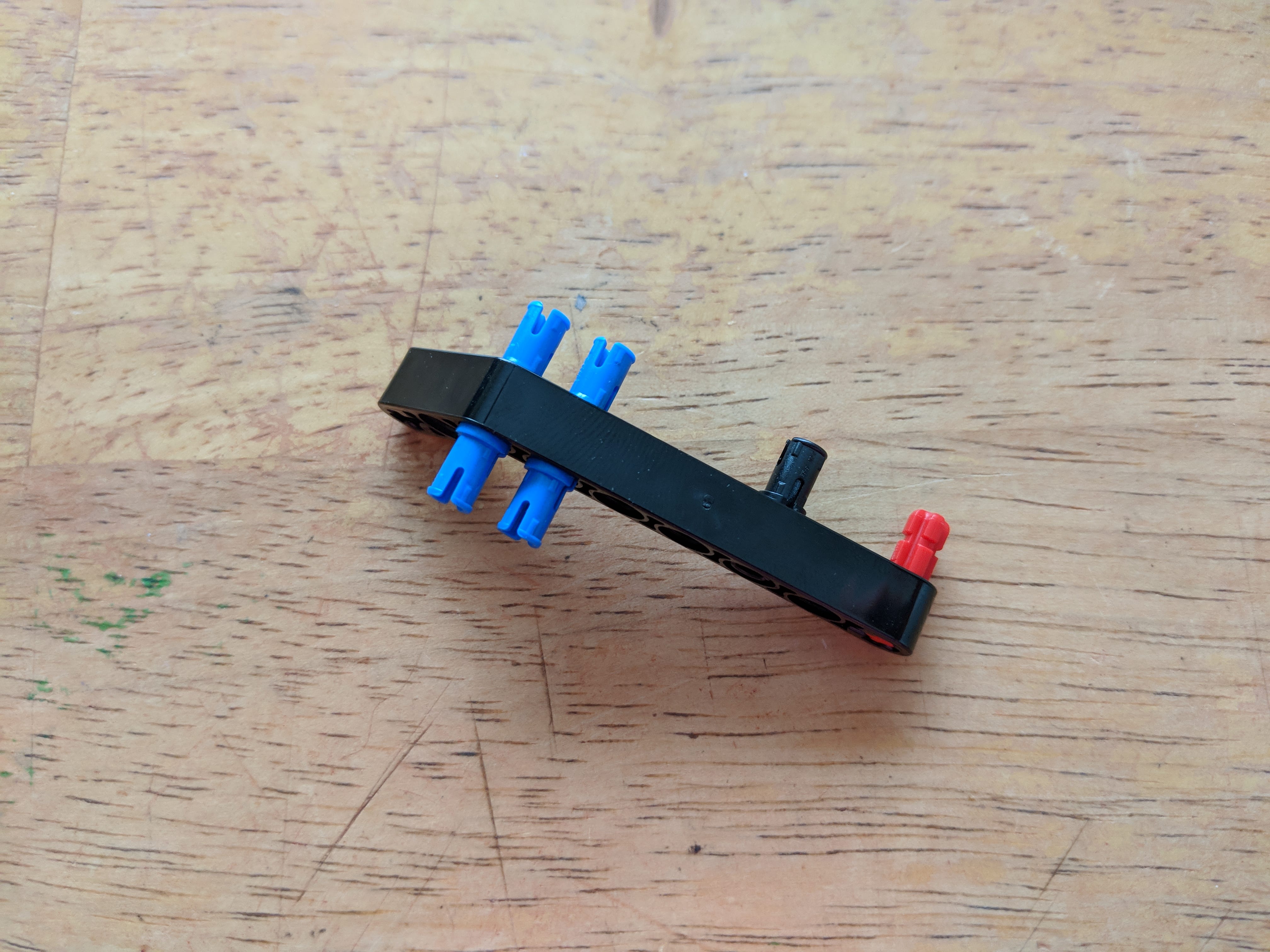
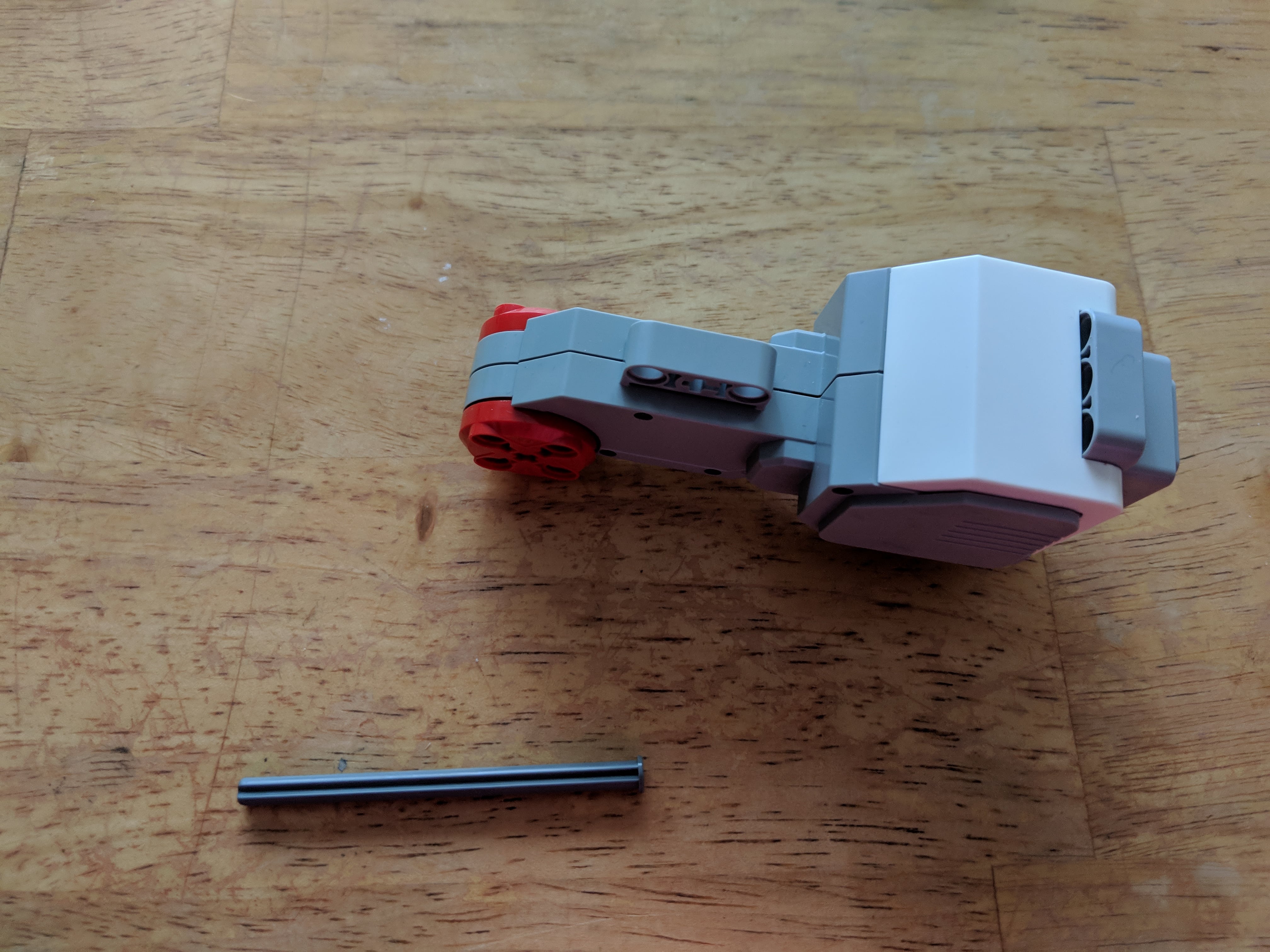
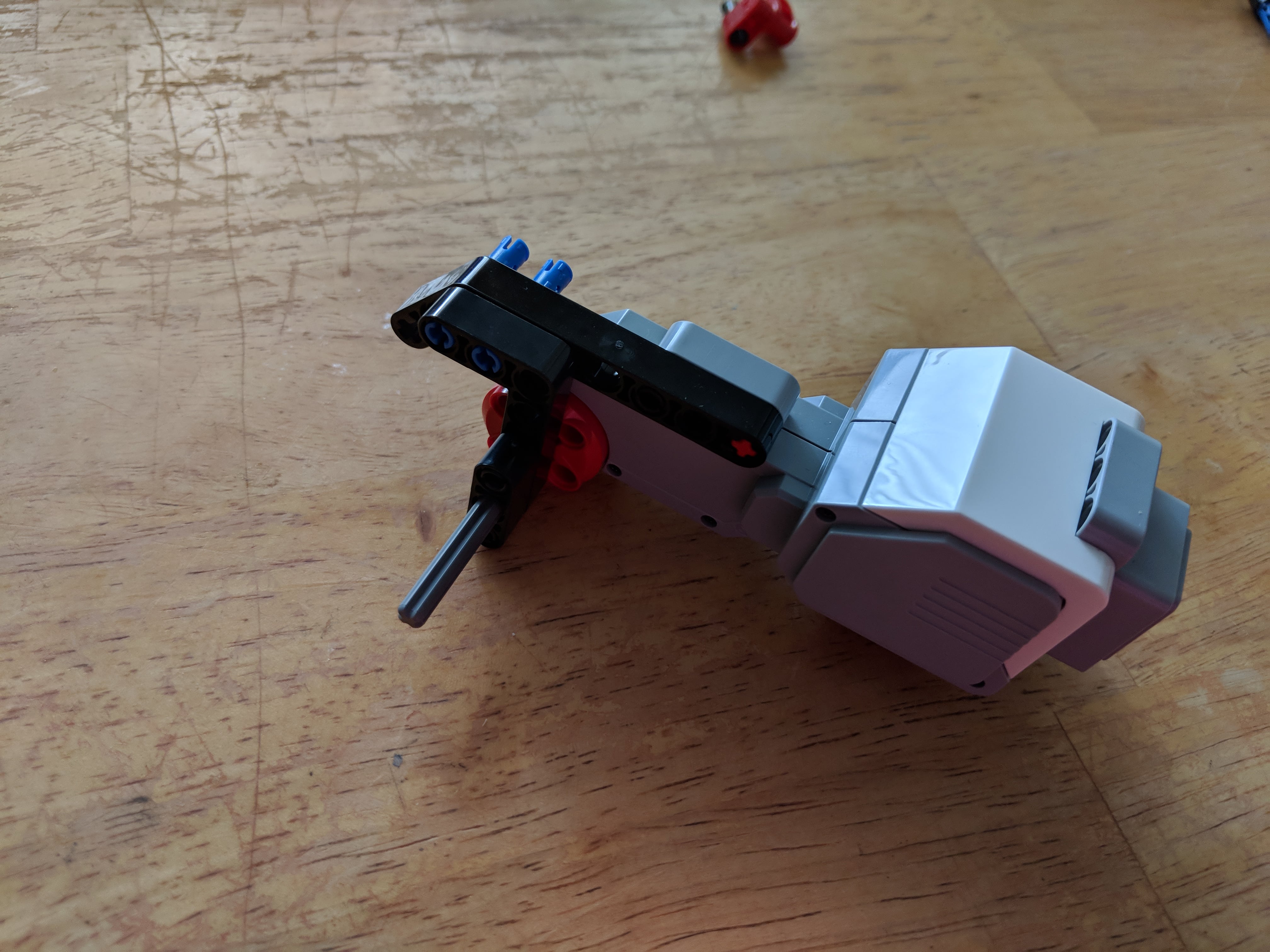
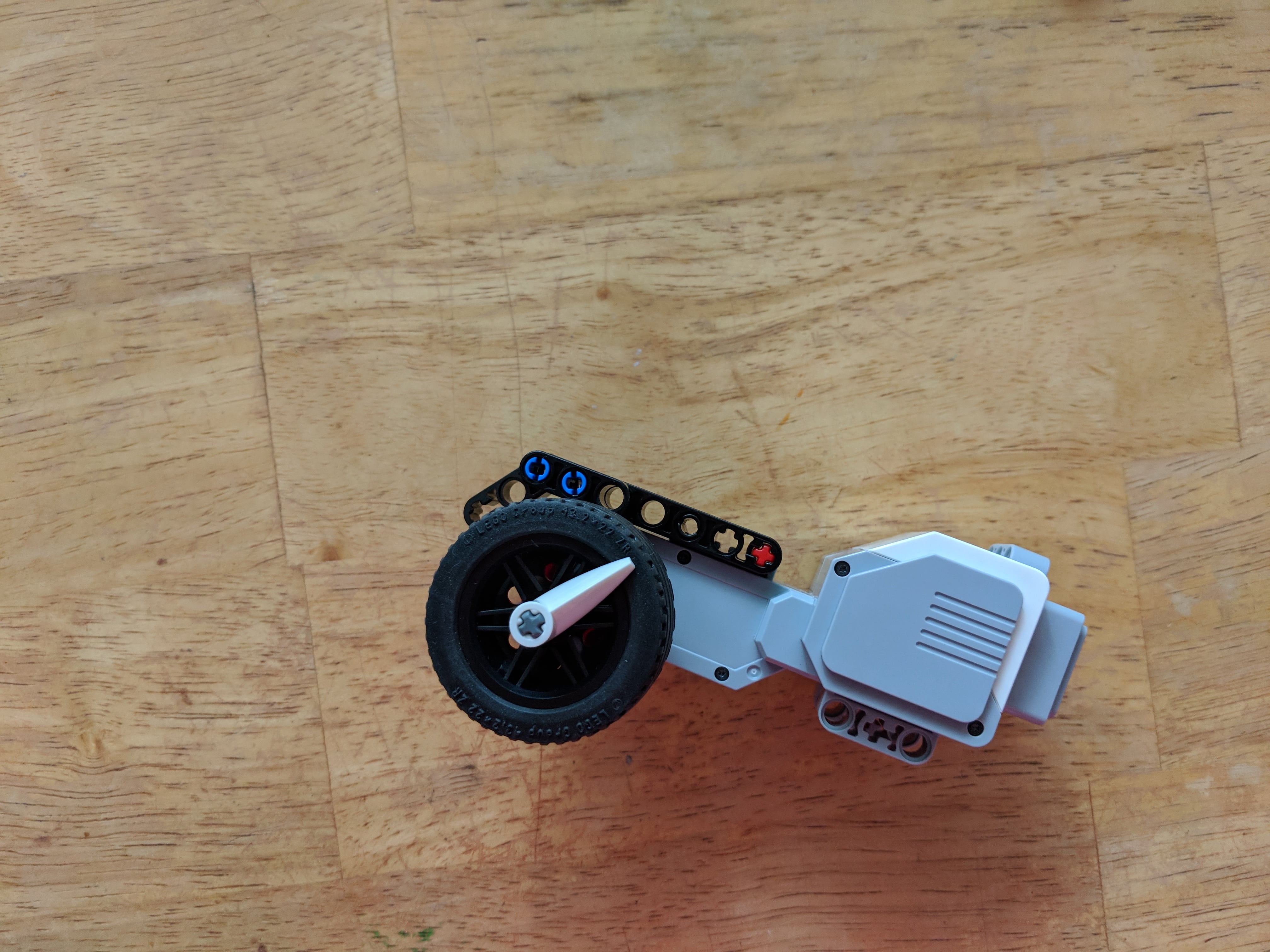
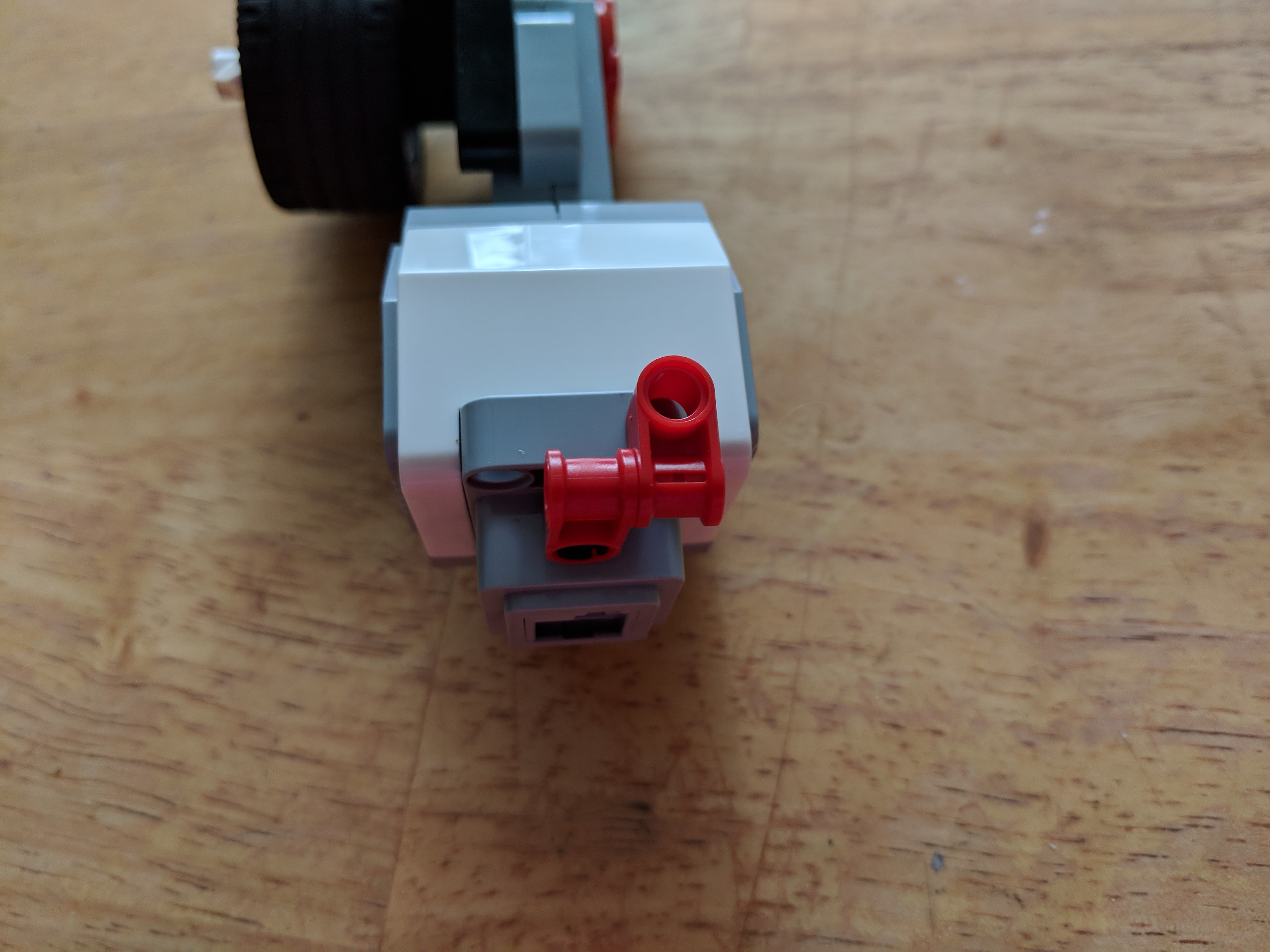
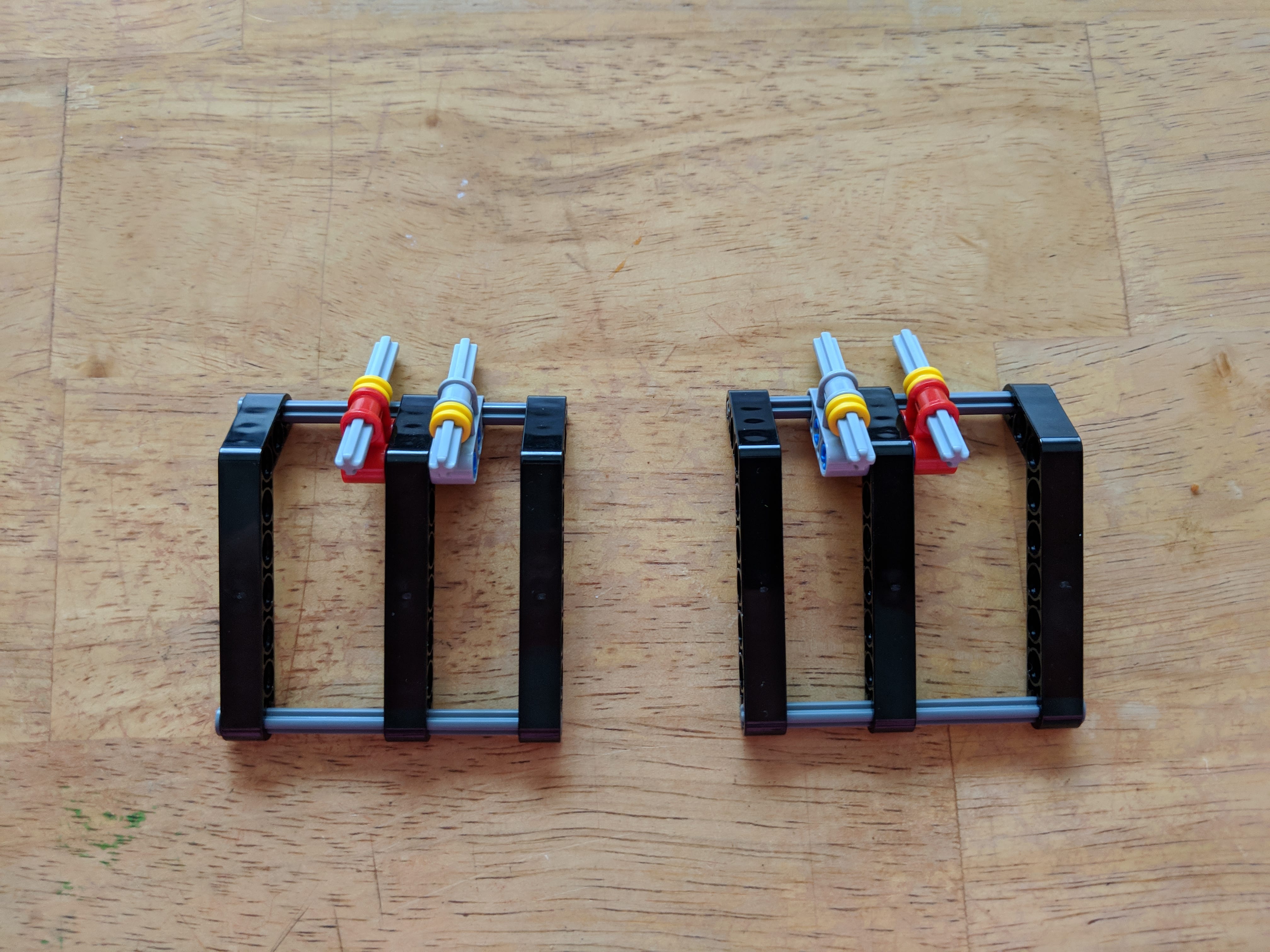
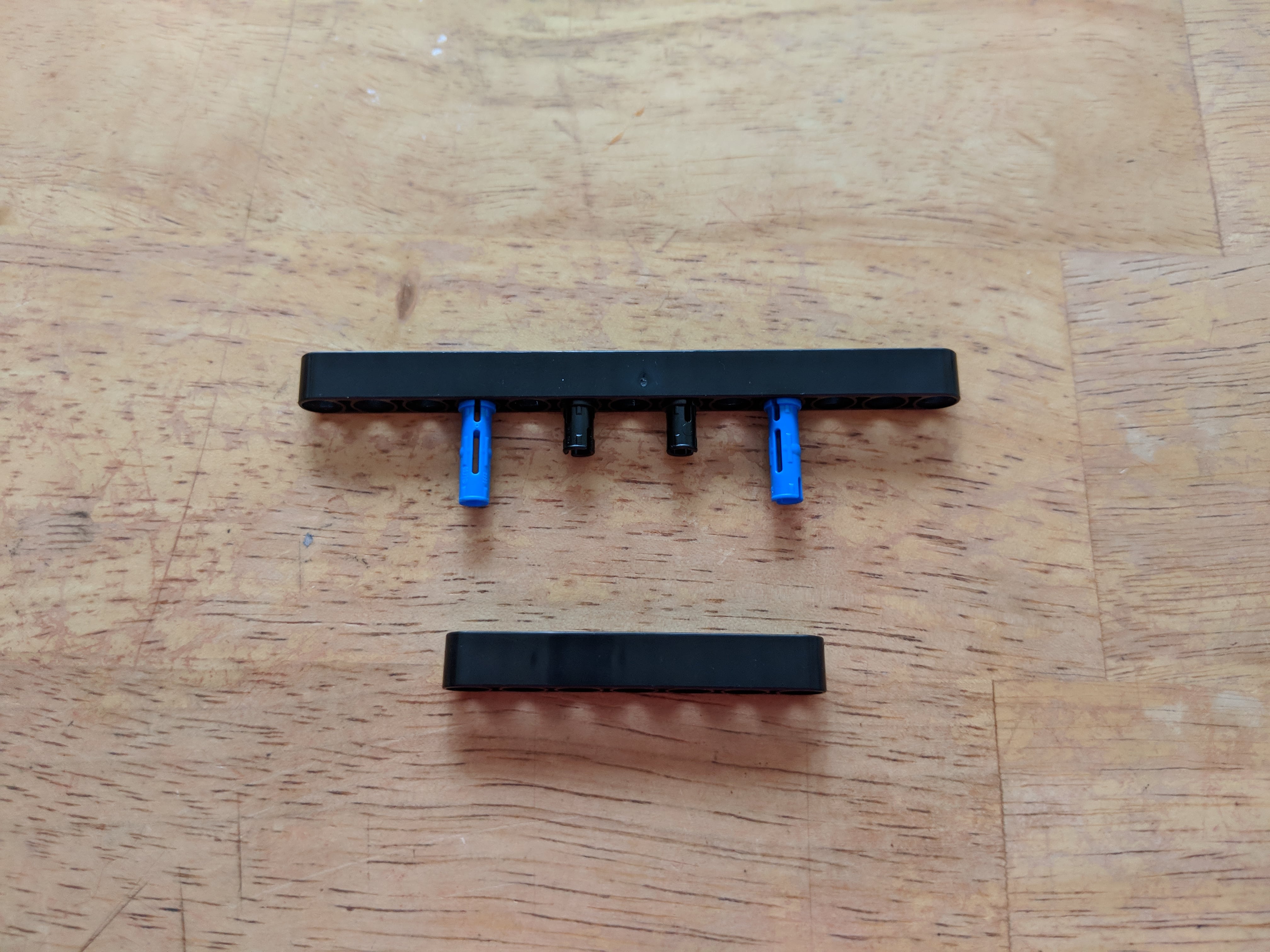
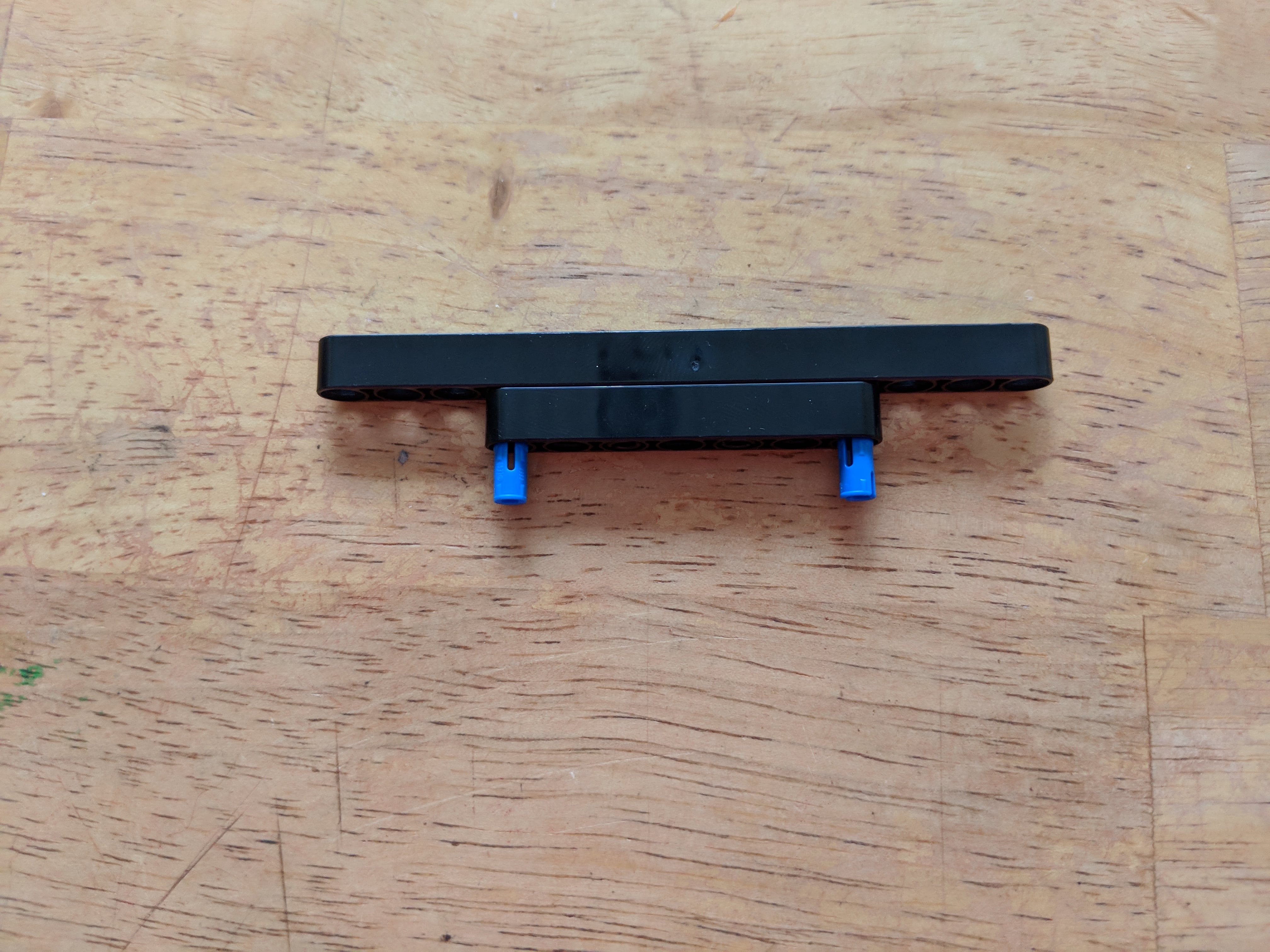
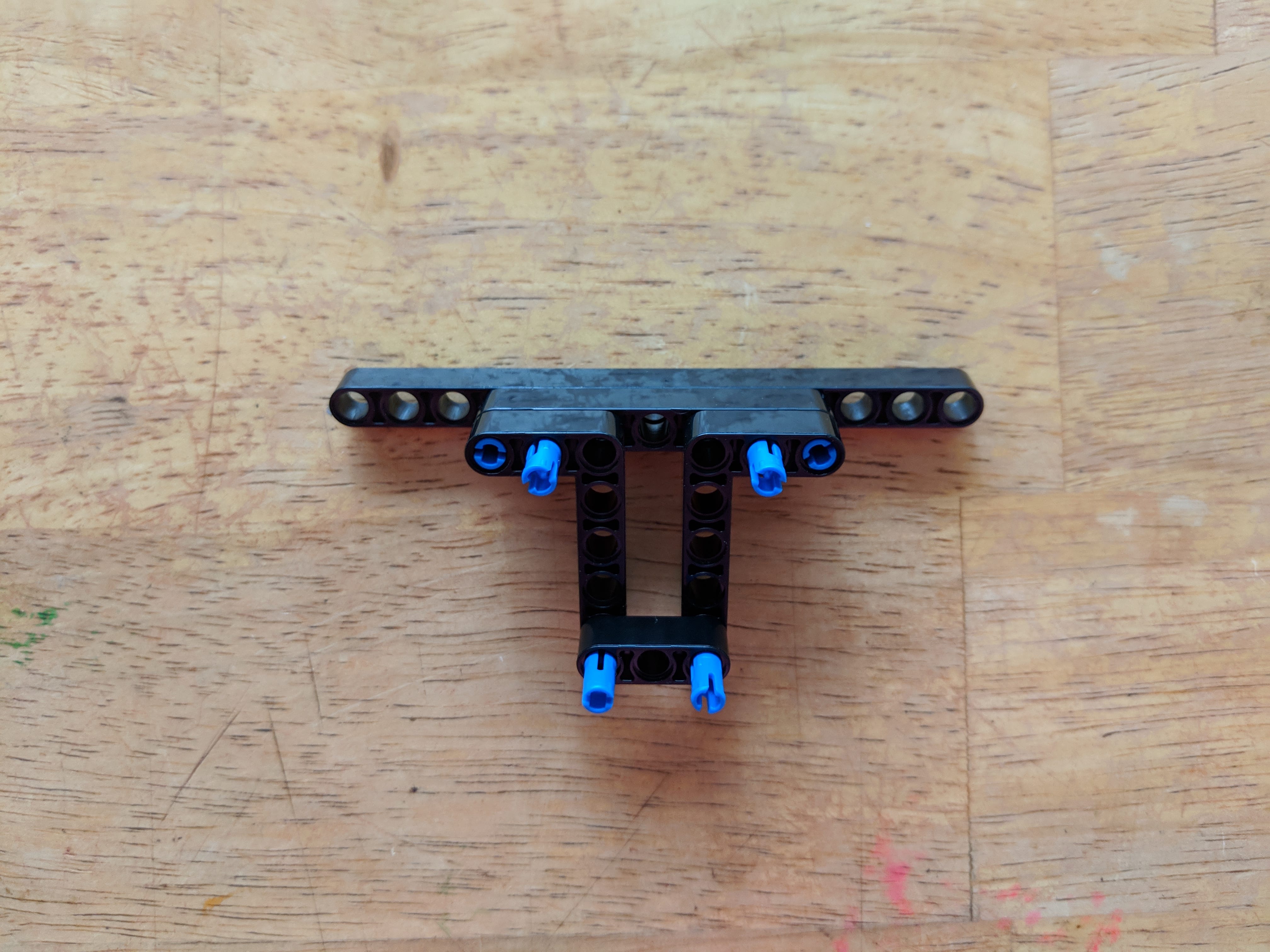
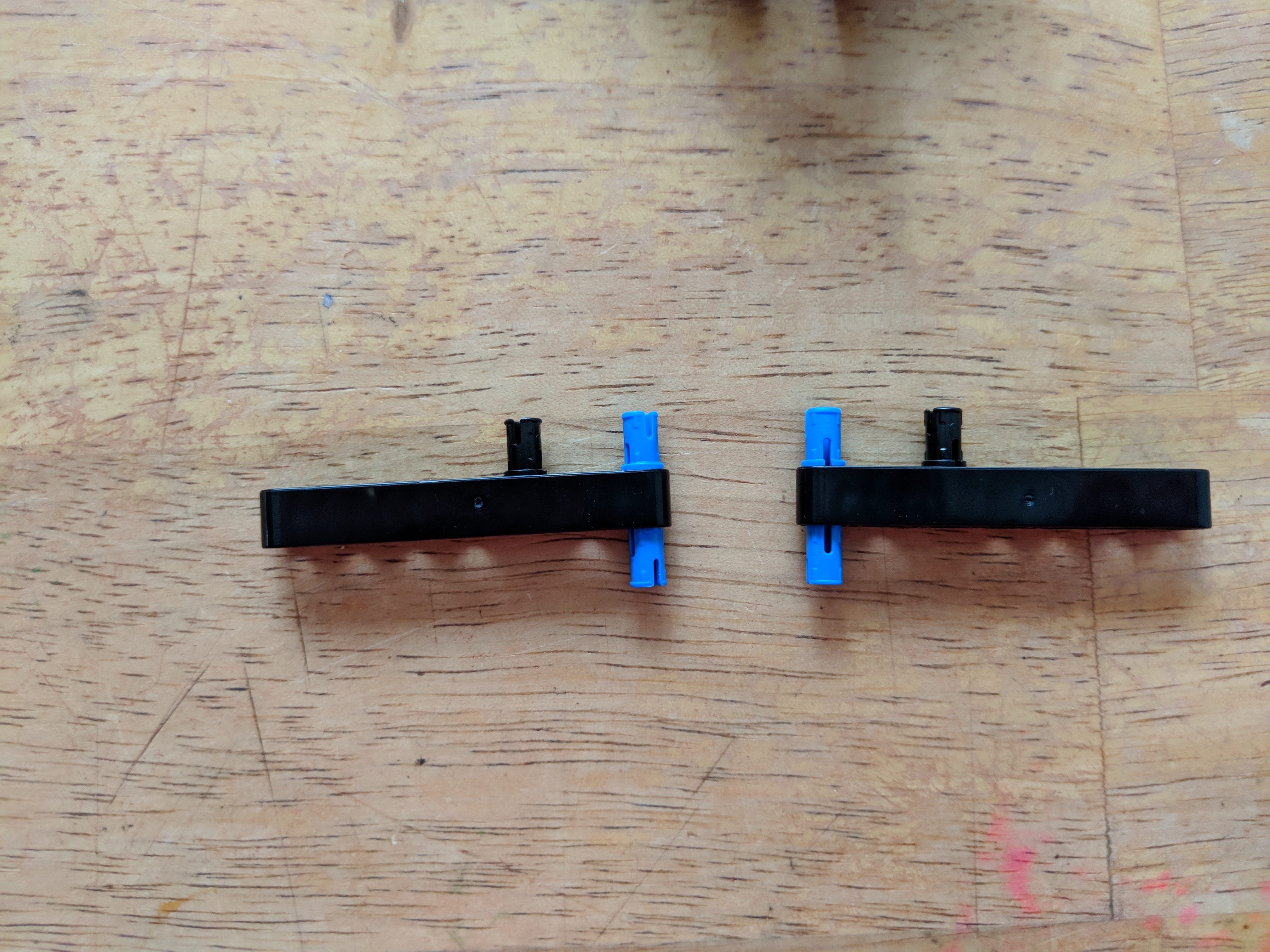
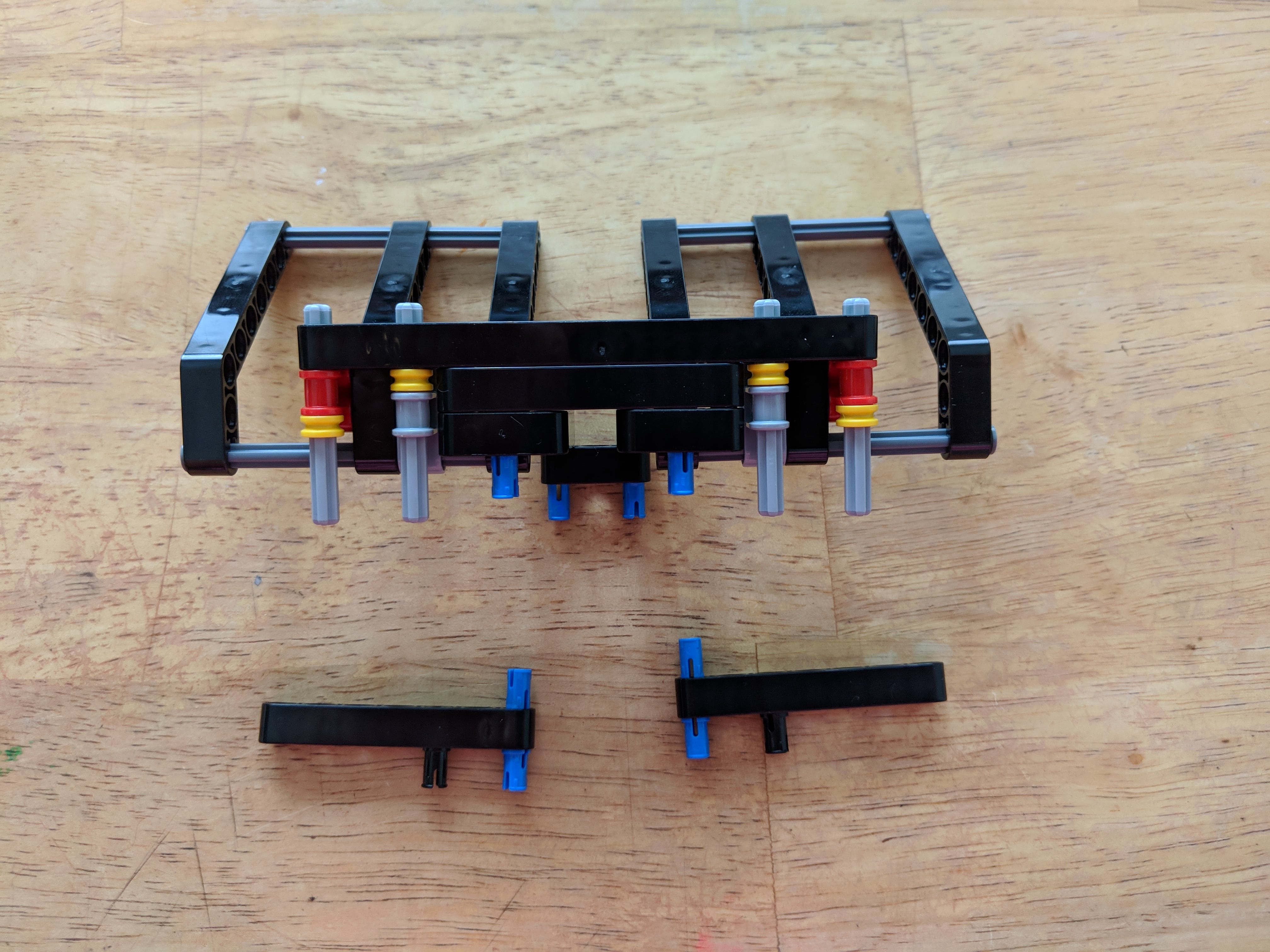
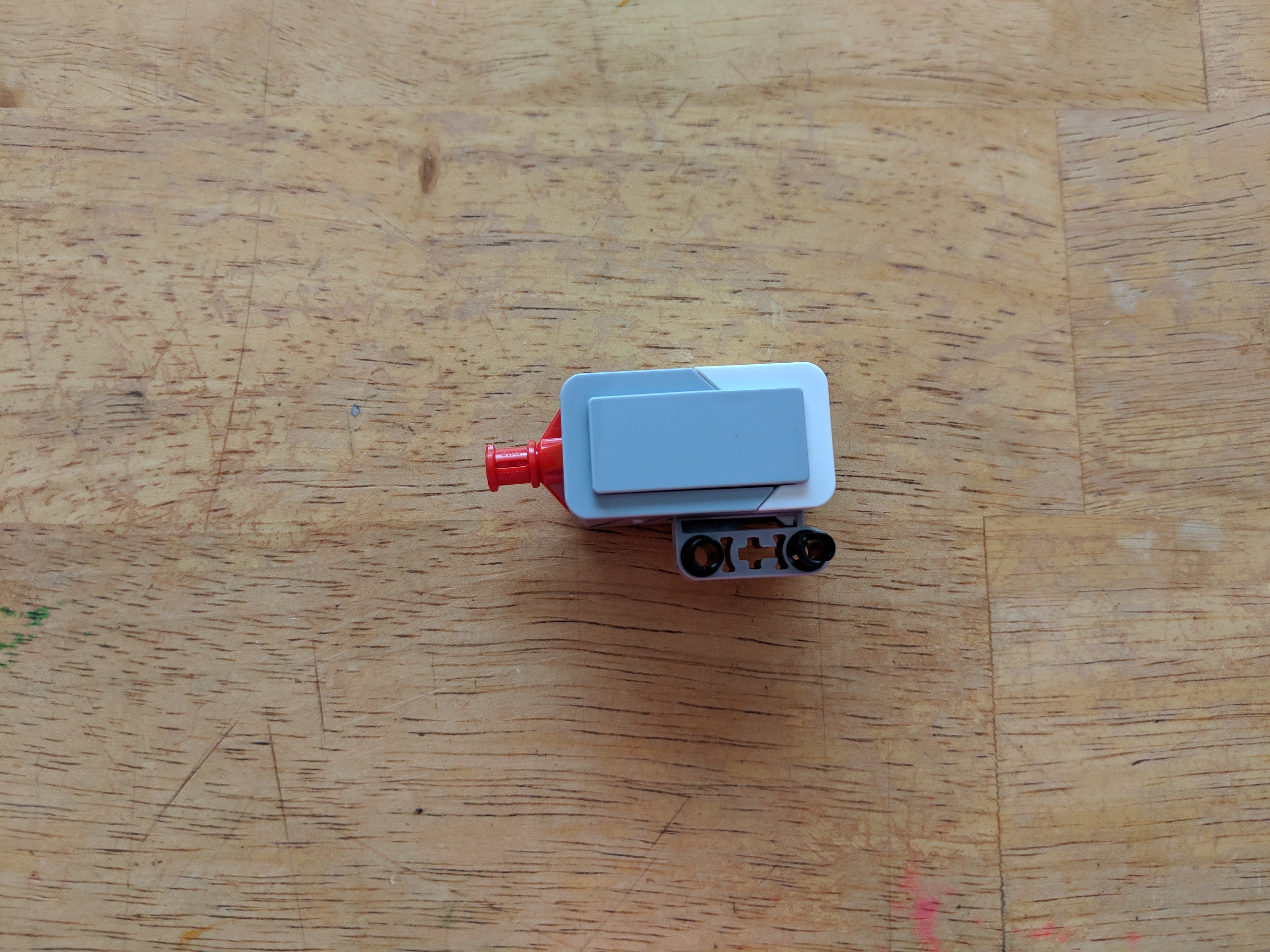
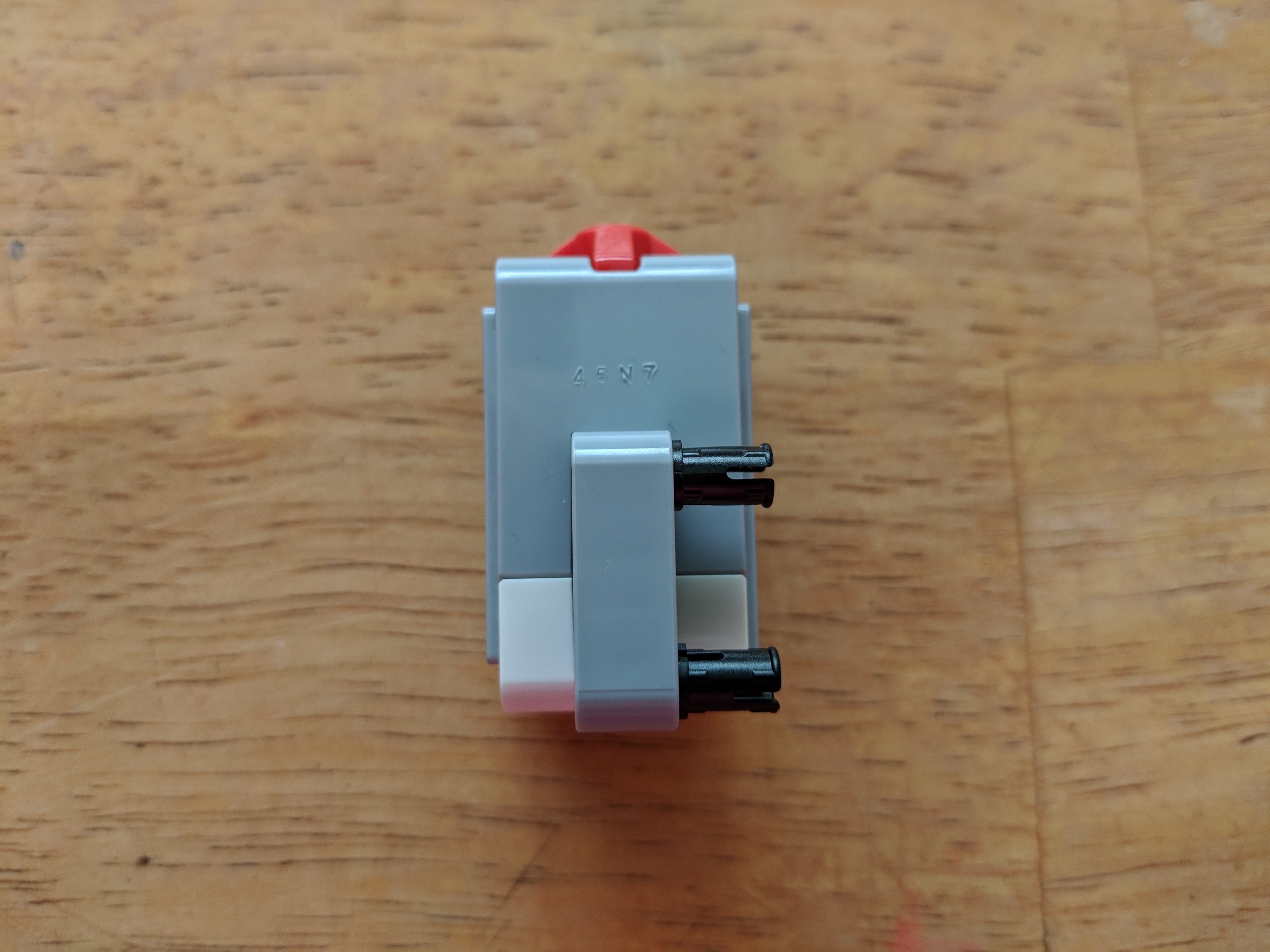
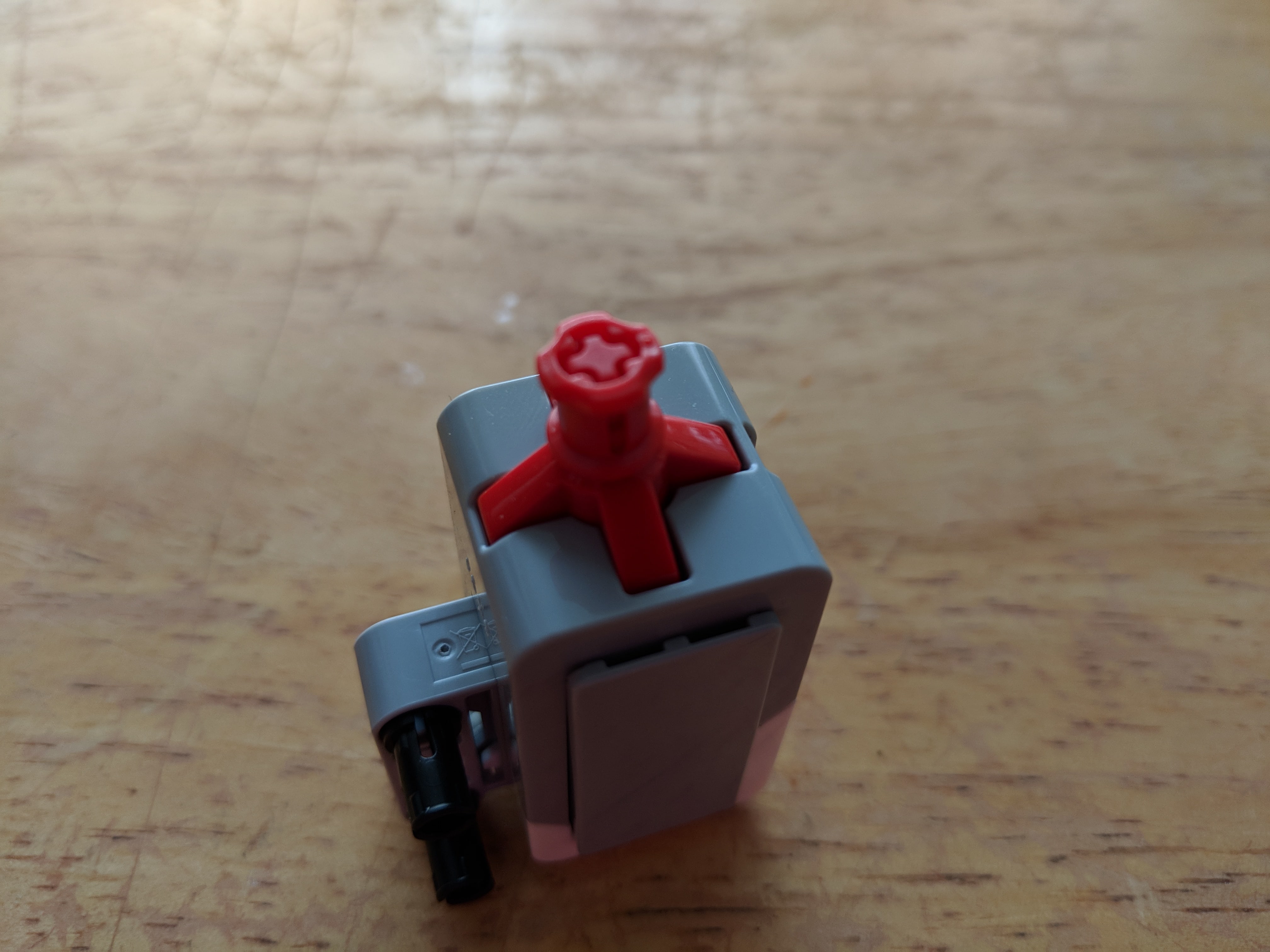
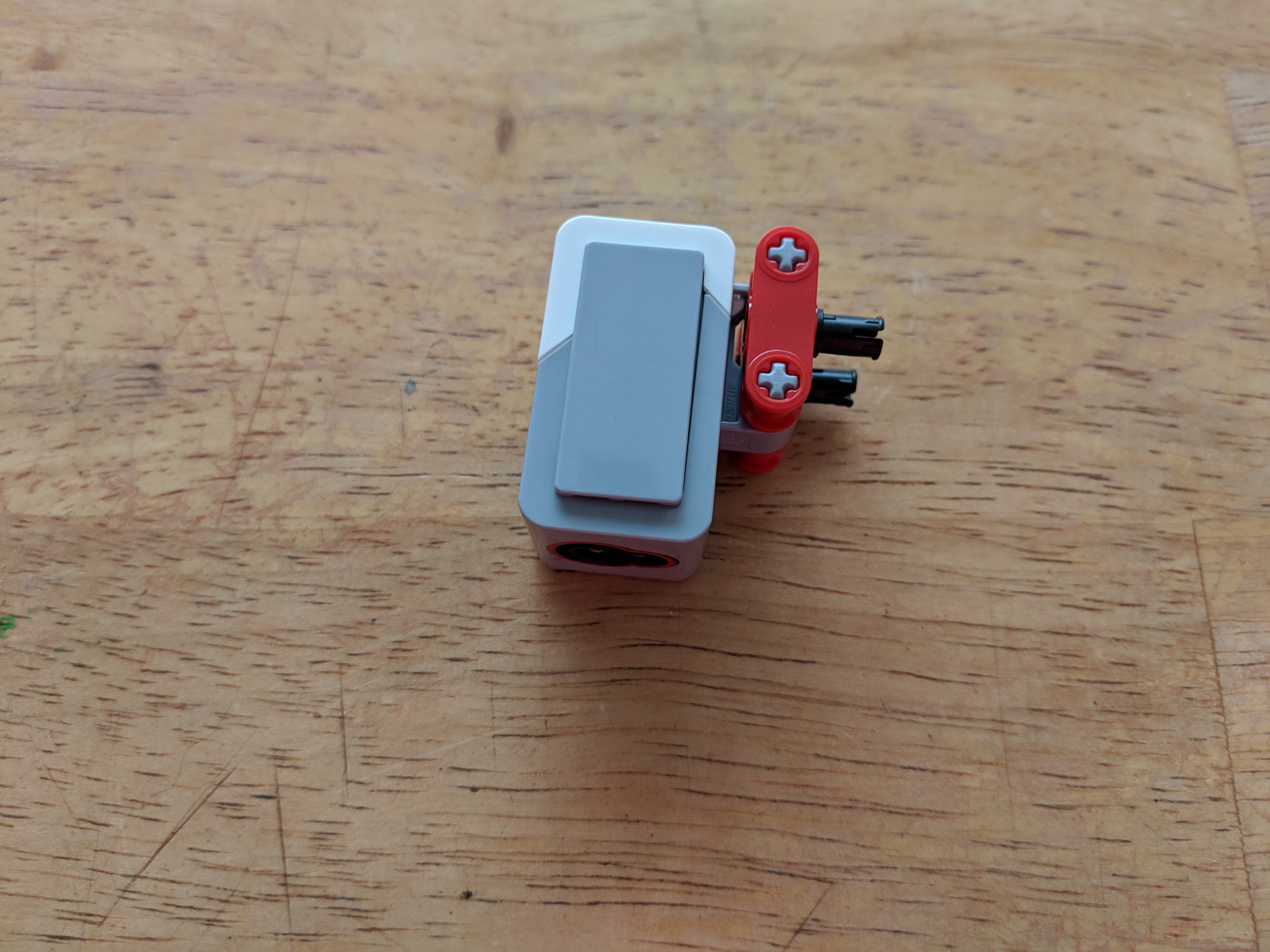
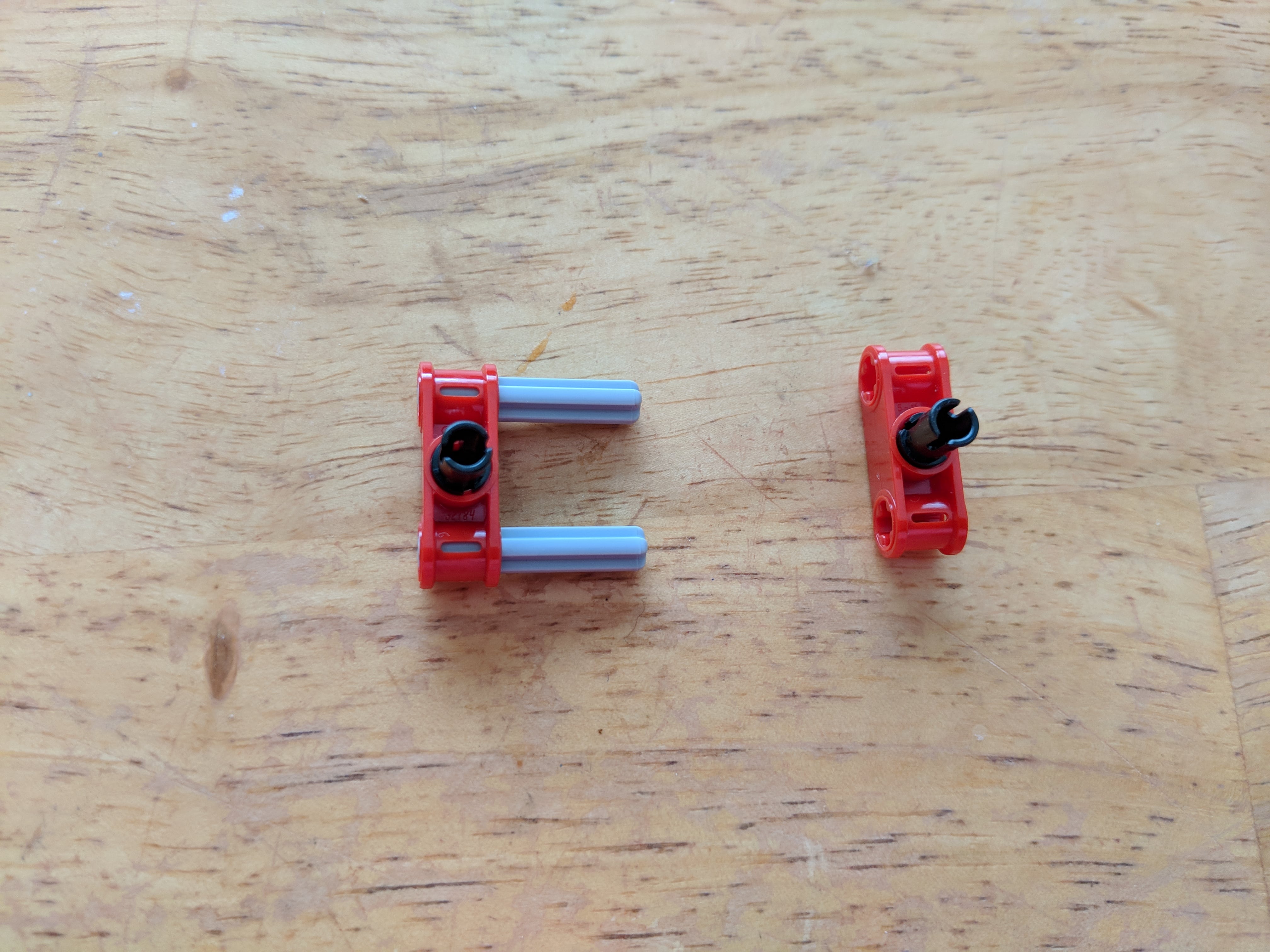
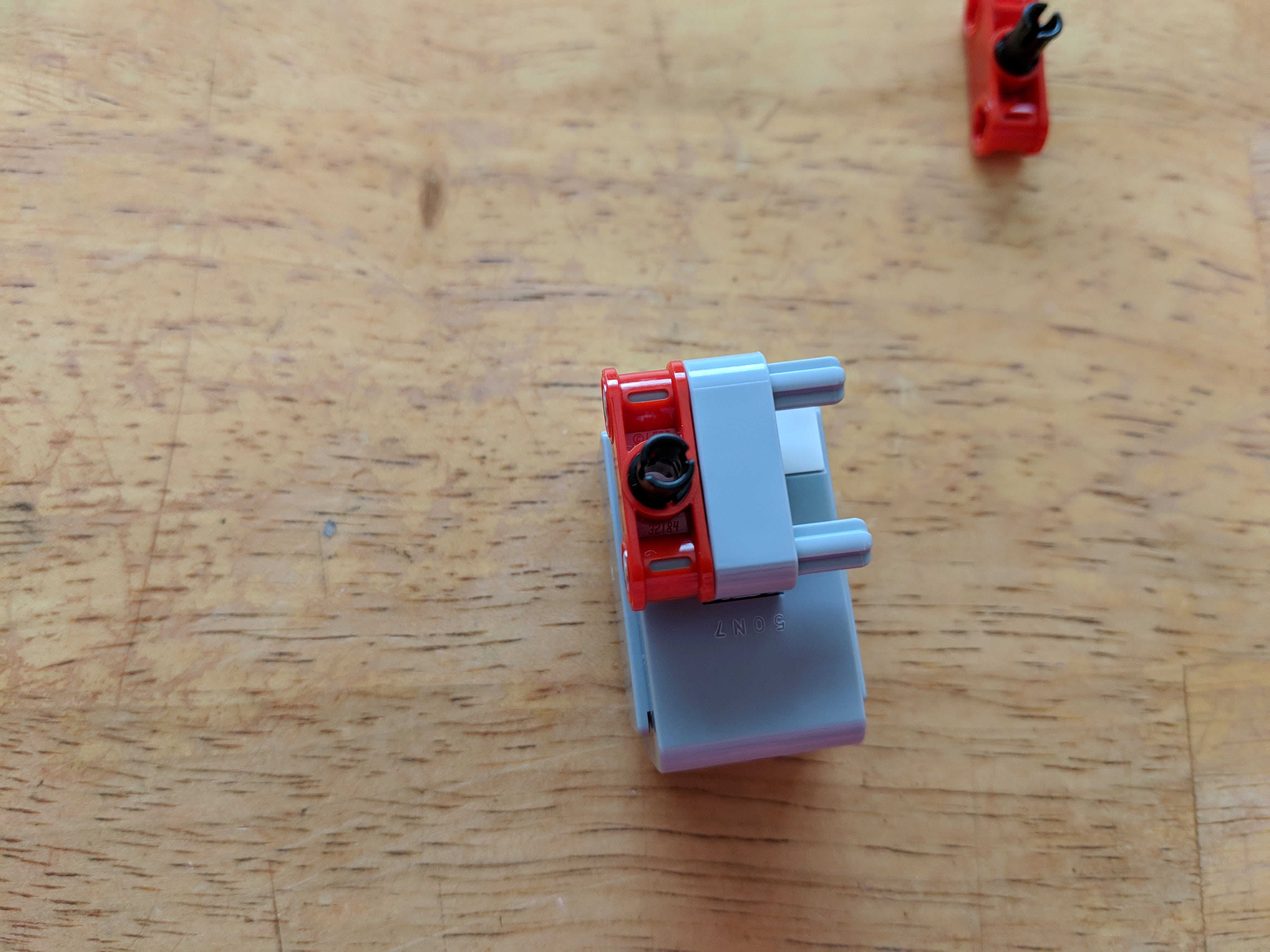
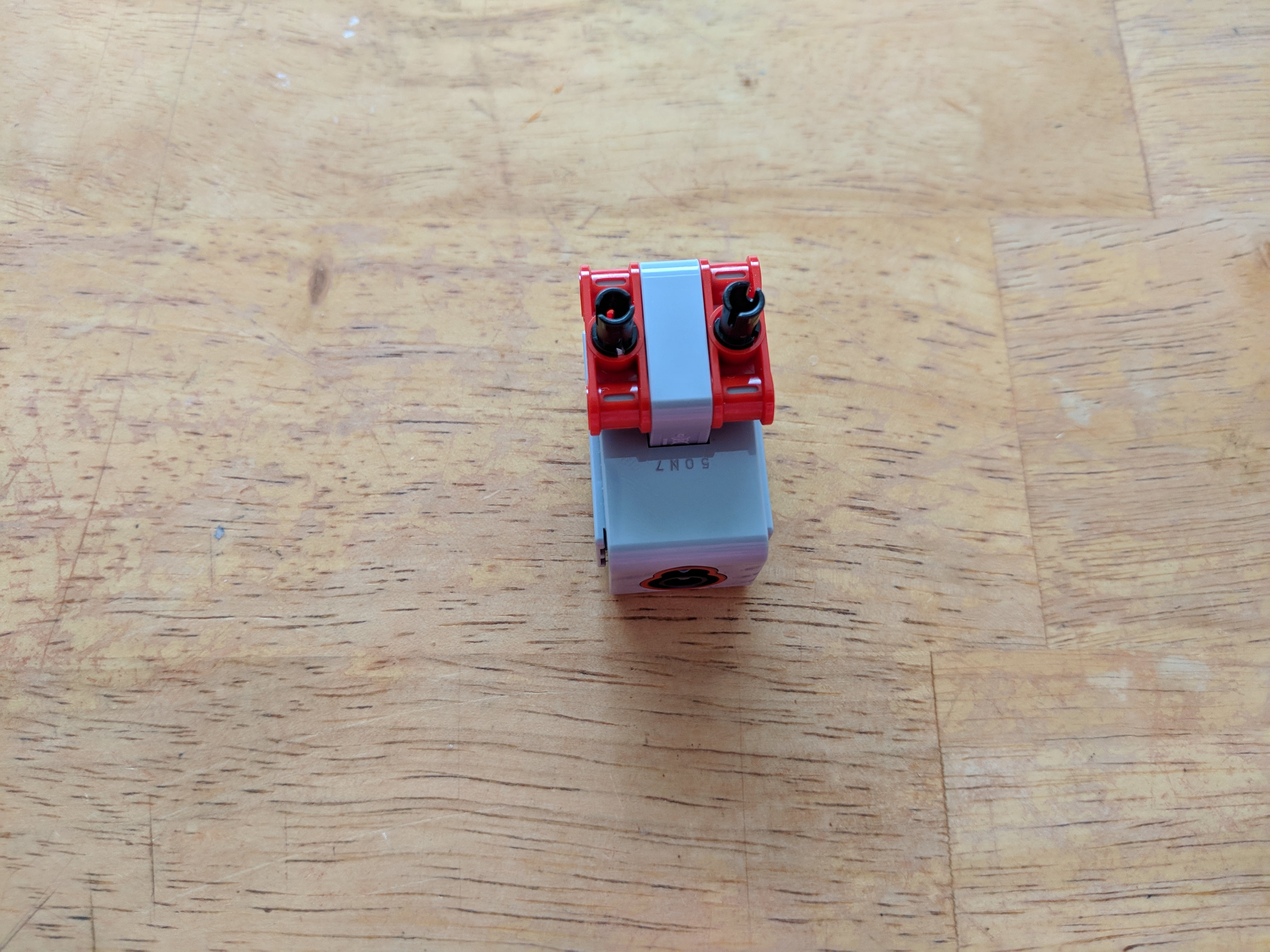
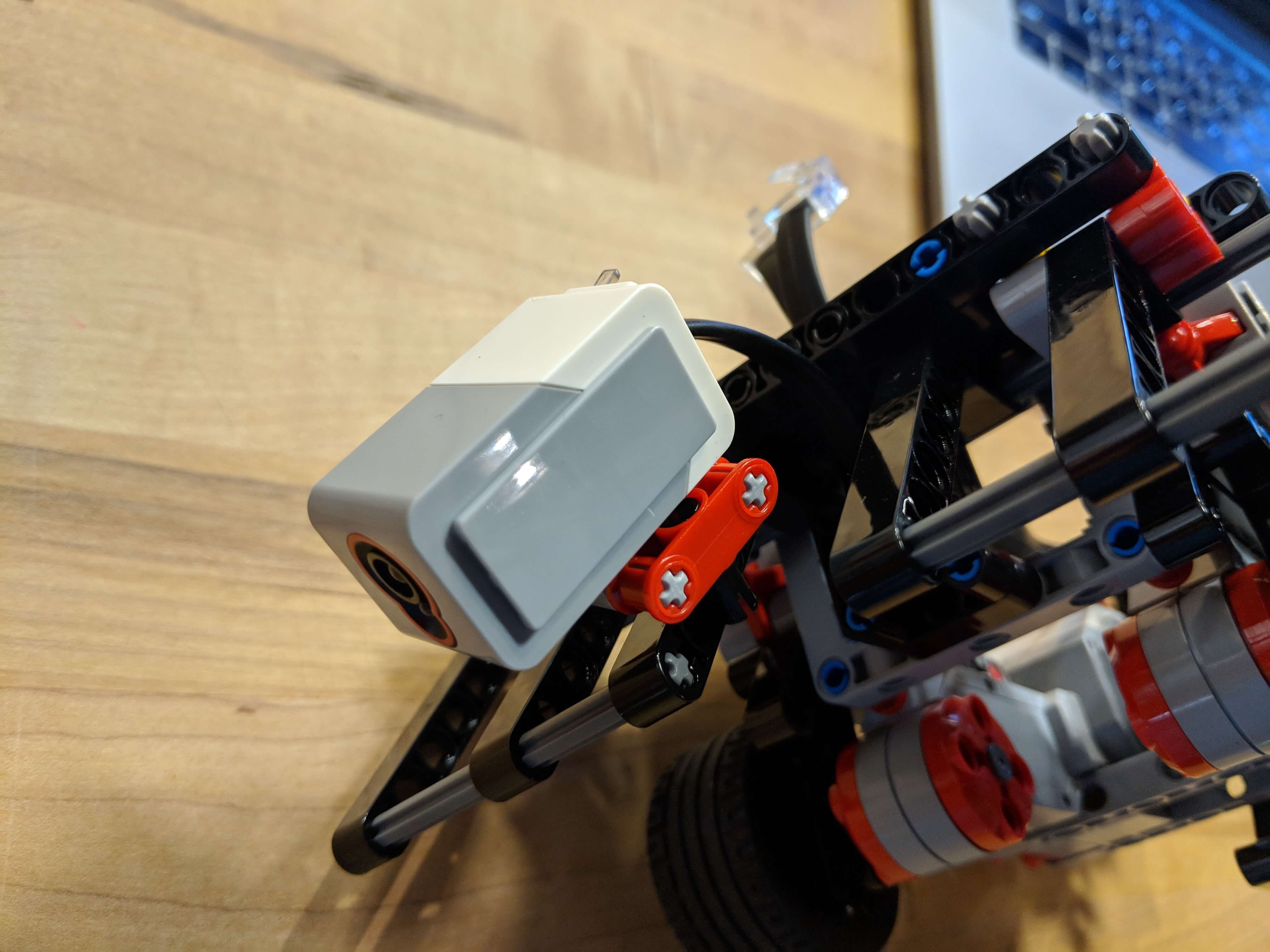
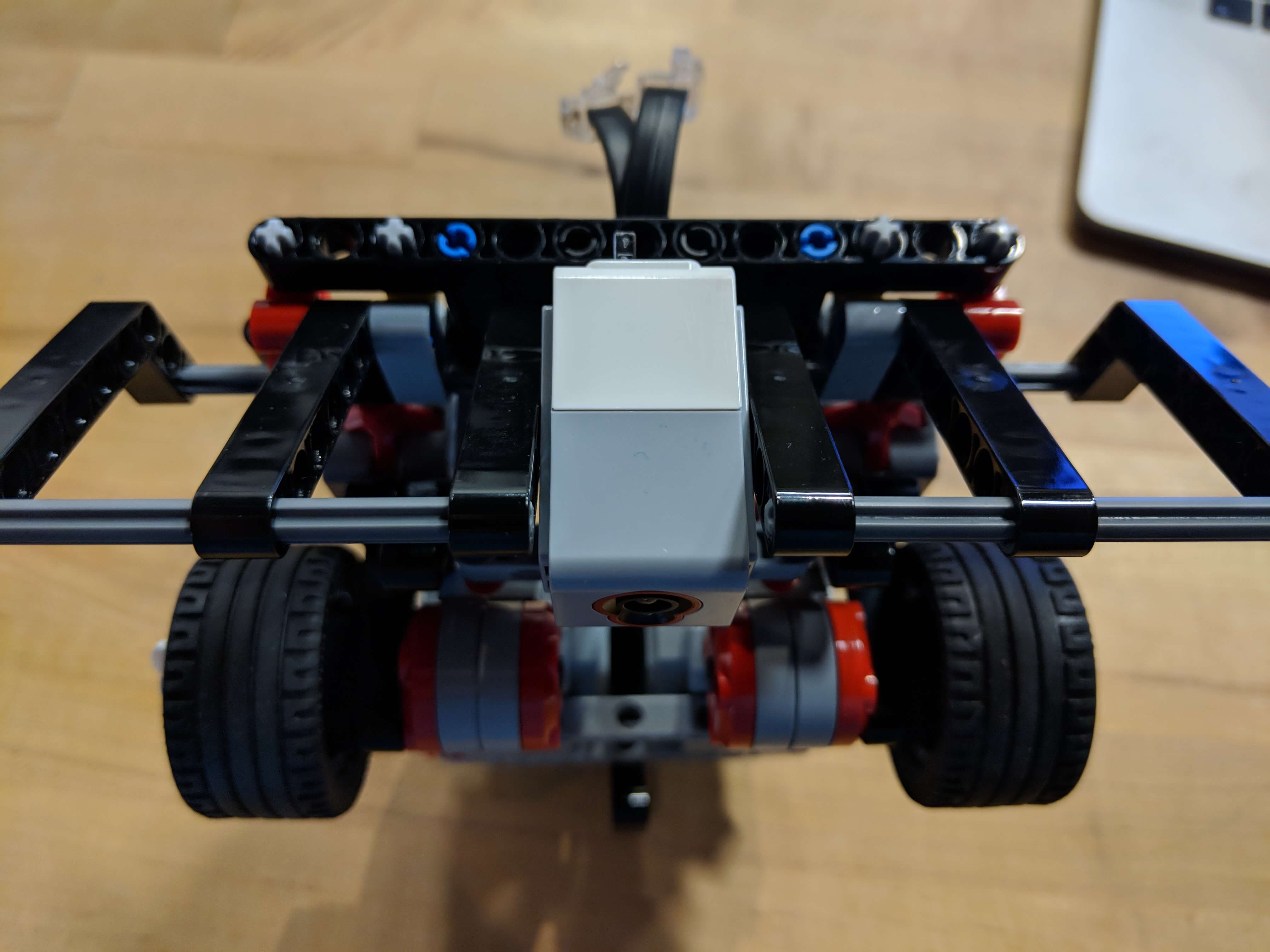
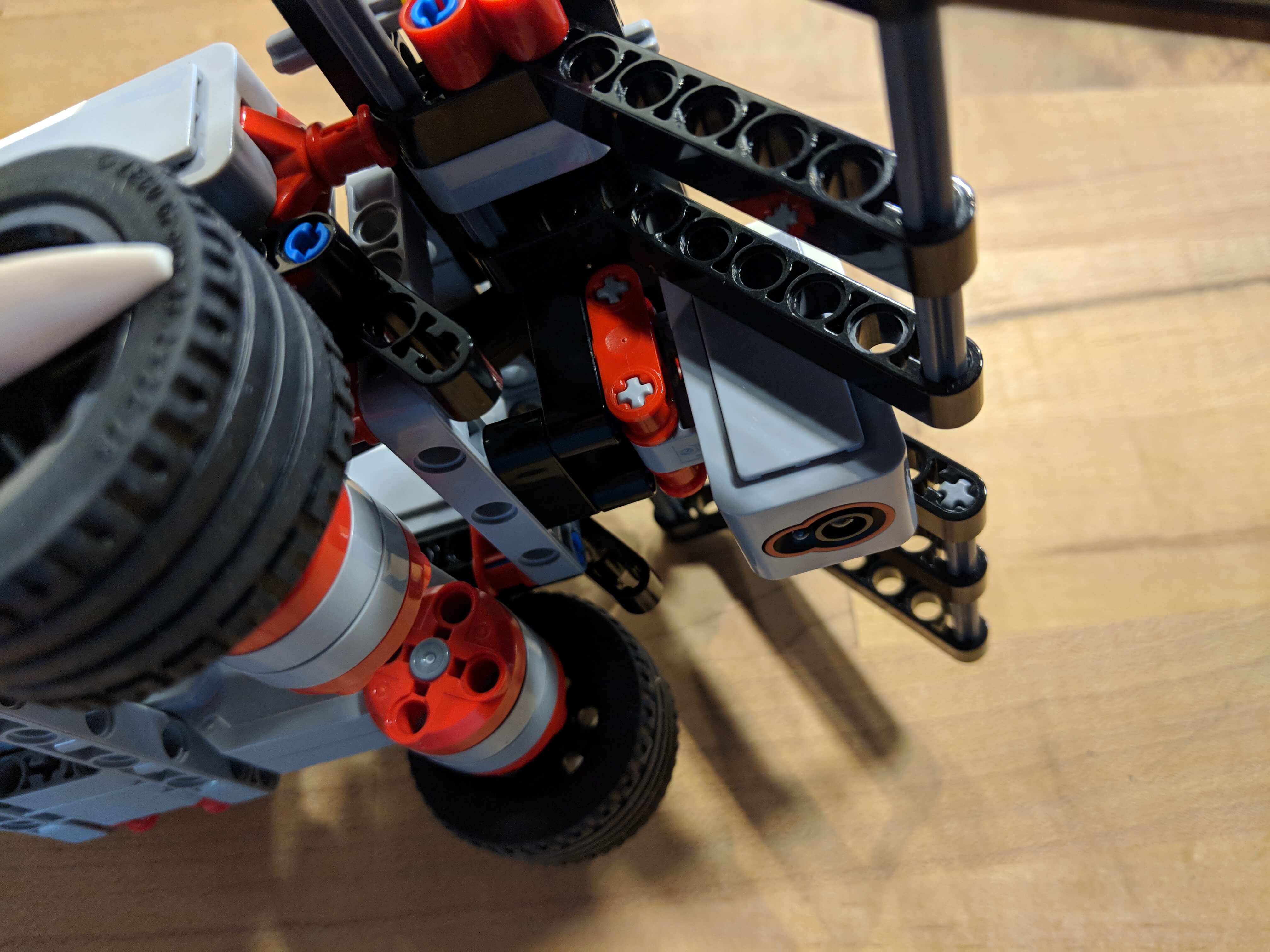
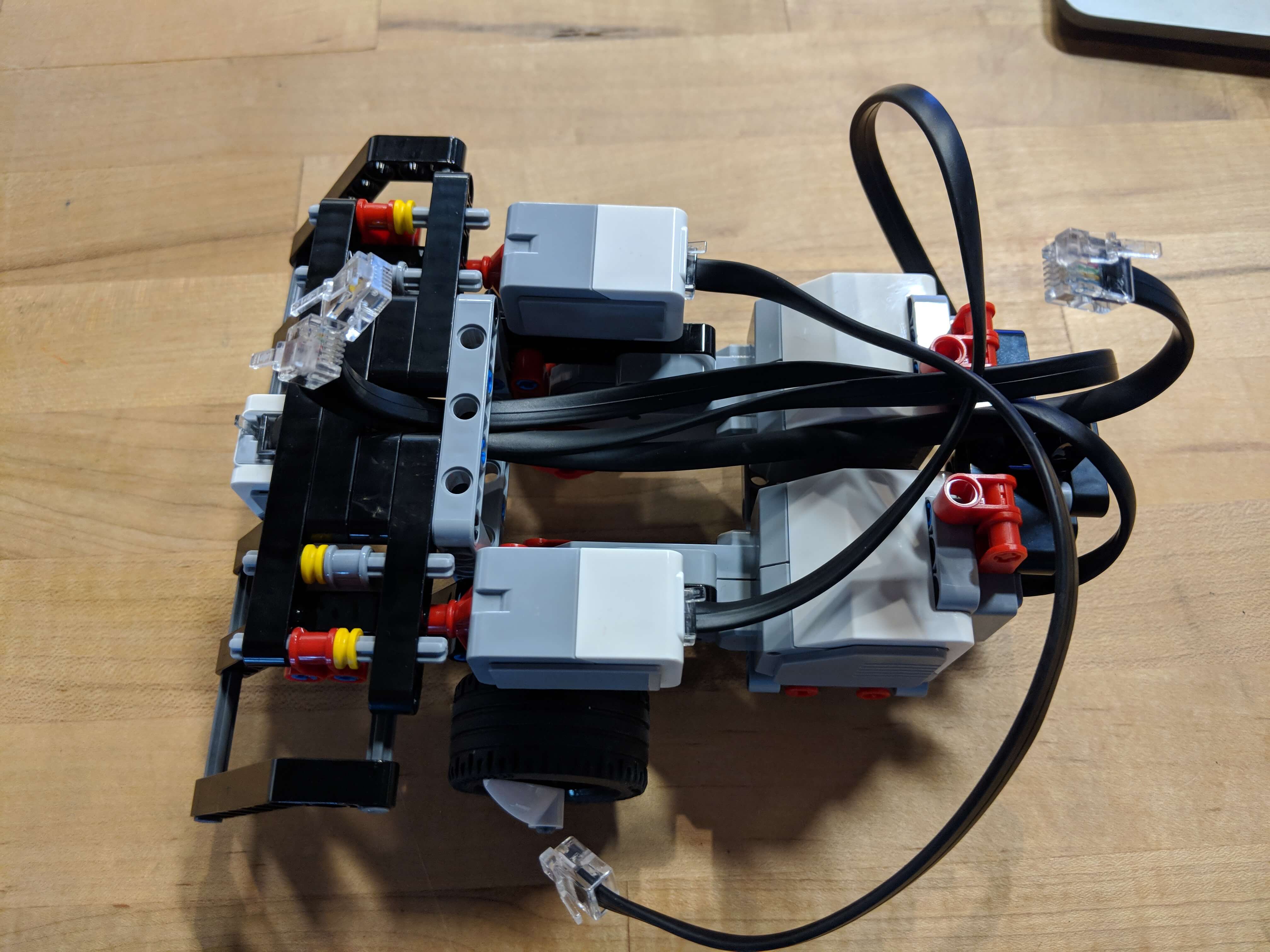
Для того, чтобы защитить впереди расположенный датчик от взаимодействия с соперником, соорудим бампер и закрепим его на нашем роботе. Ниже приведены подробные инструкции для сборки, как из домашней, так и из образовательной версии конструктора Lego mindstorms EV3. Можете поэкспериментировать и придумать собственный вариант конструкции.
Lego mindstorms EV3 Home
")
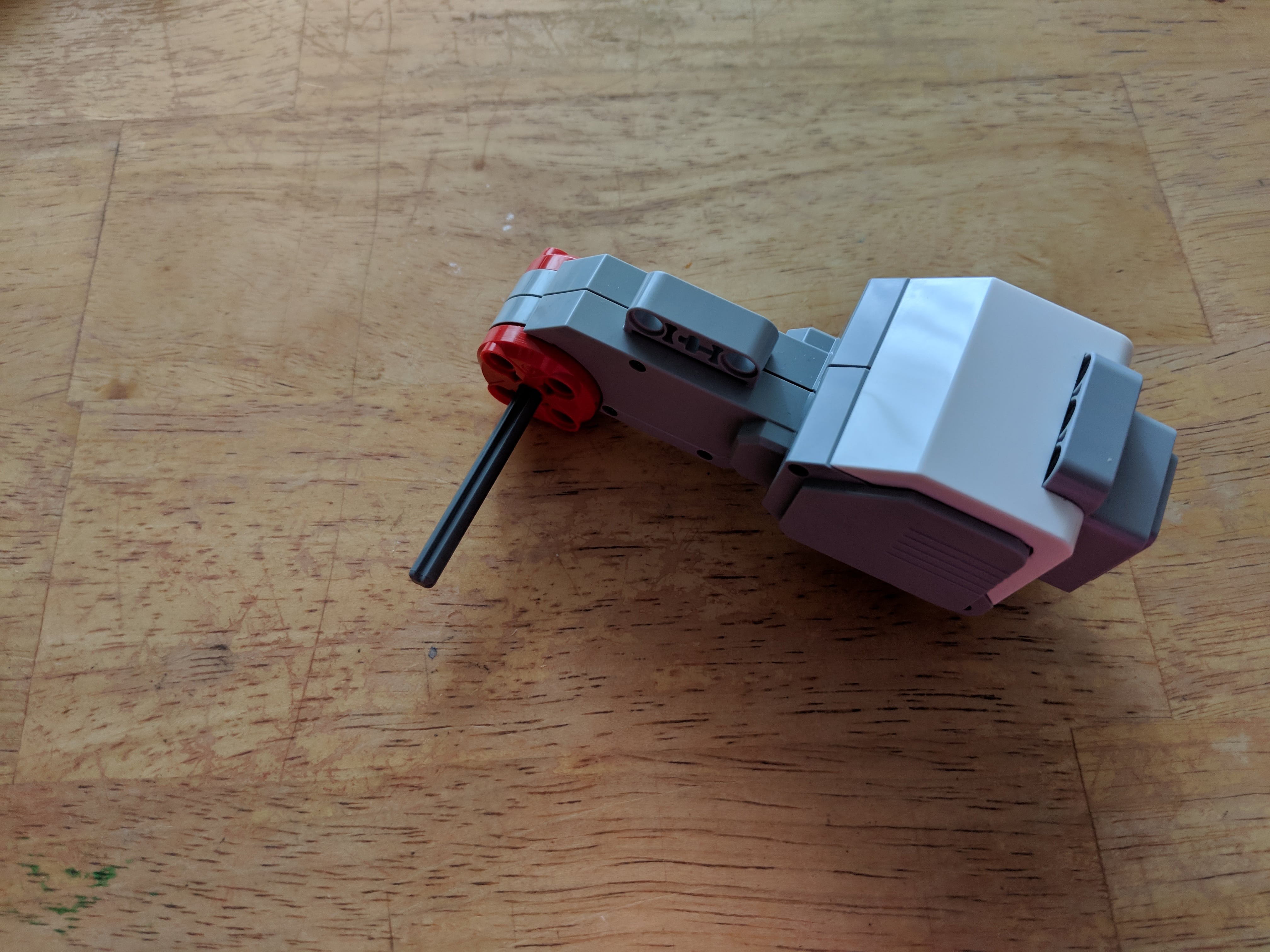
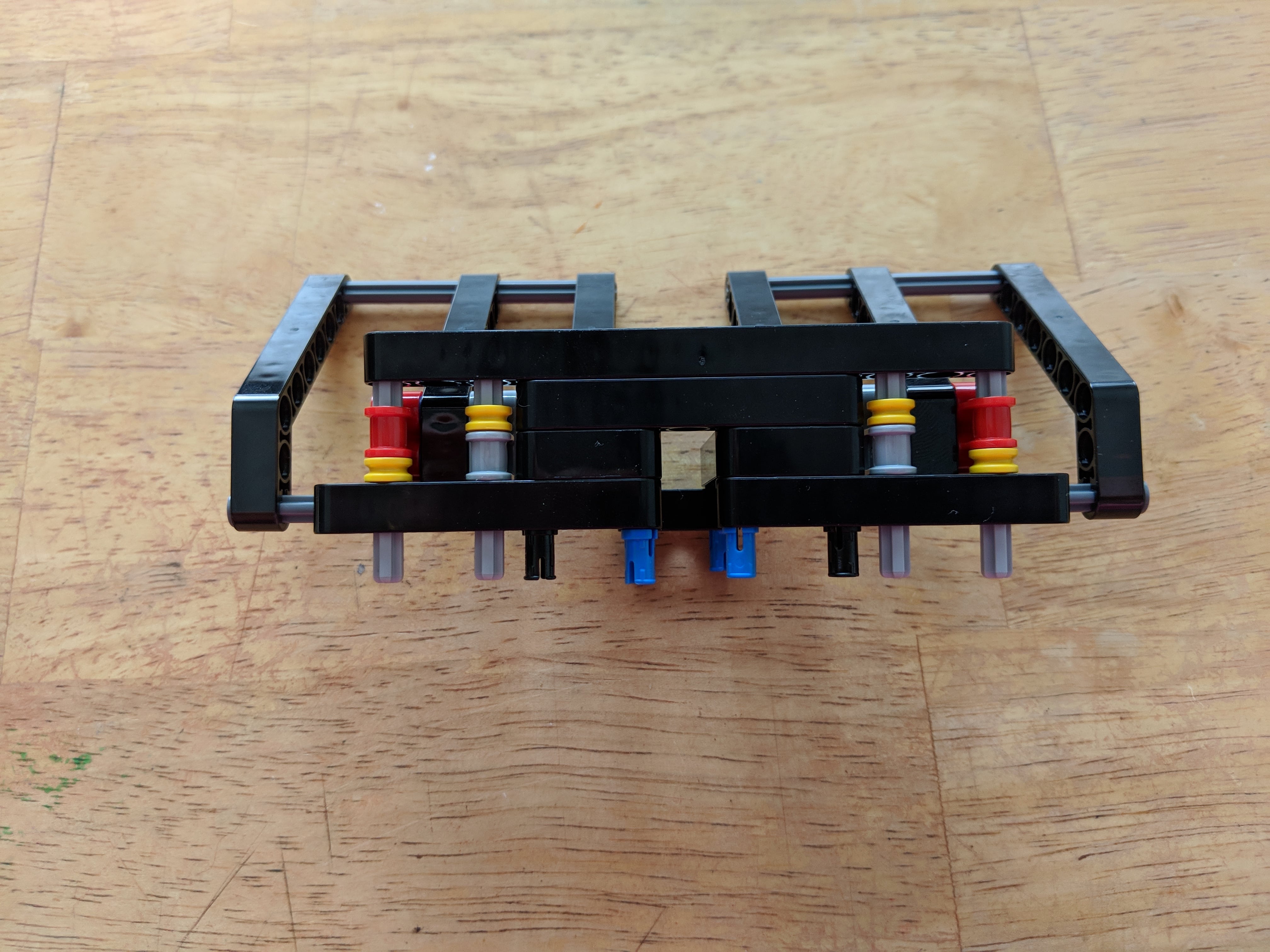
Lego mindstorms EV3 Education
")
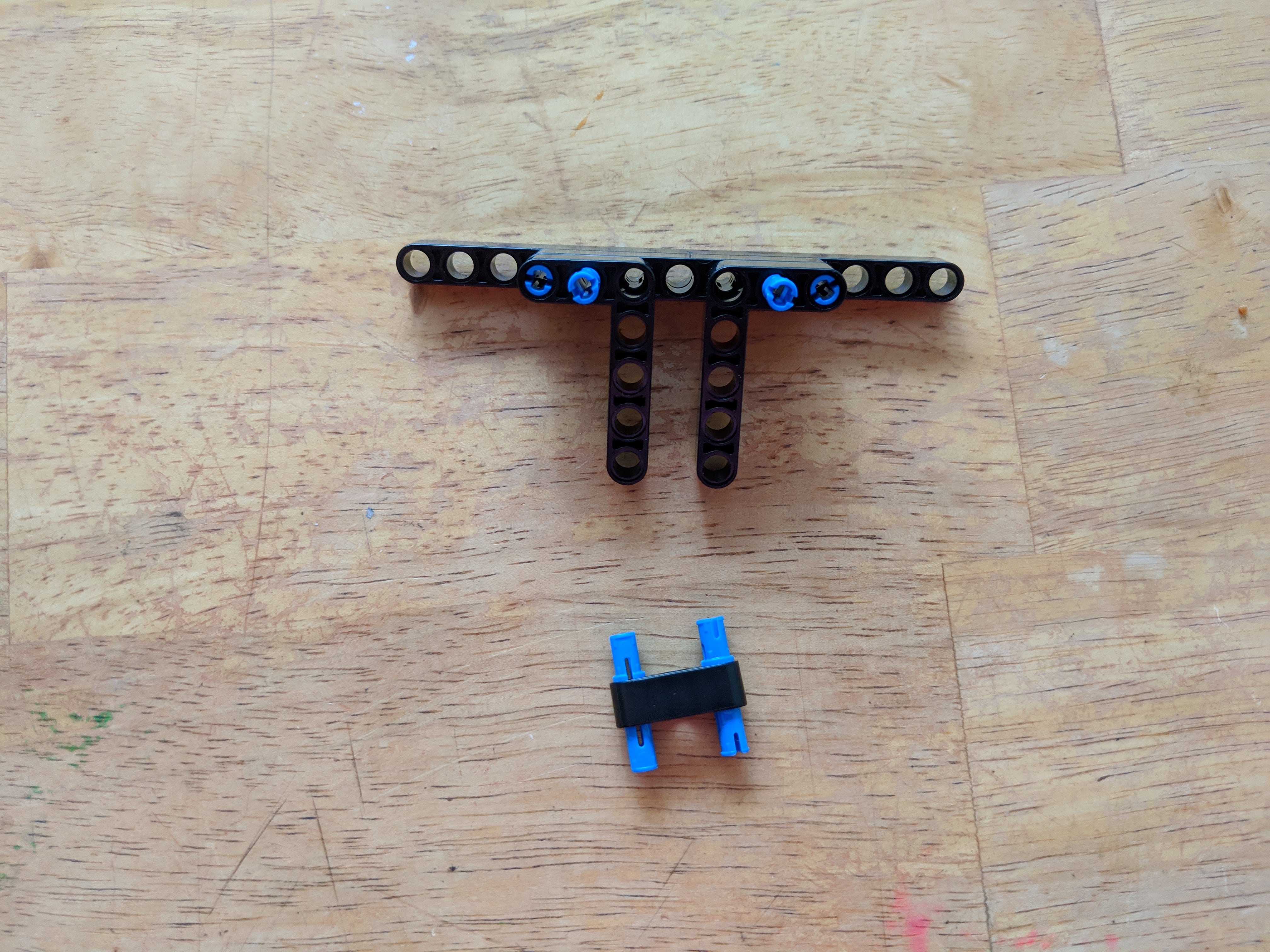
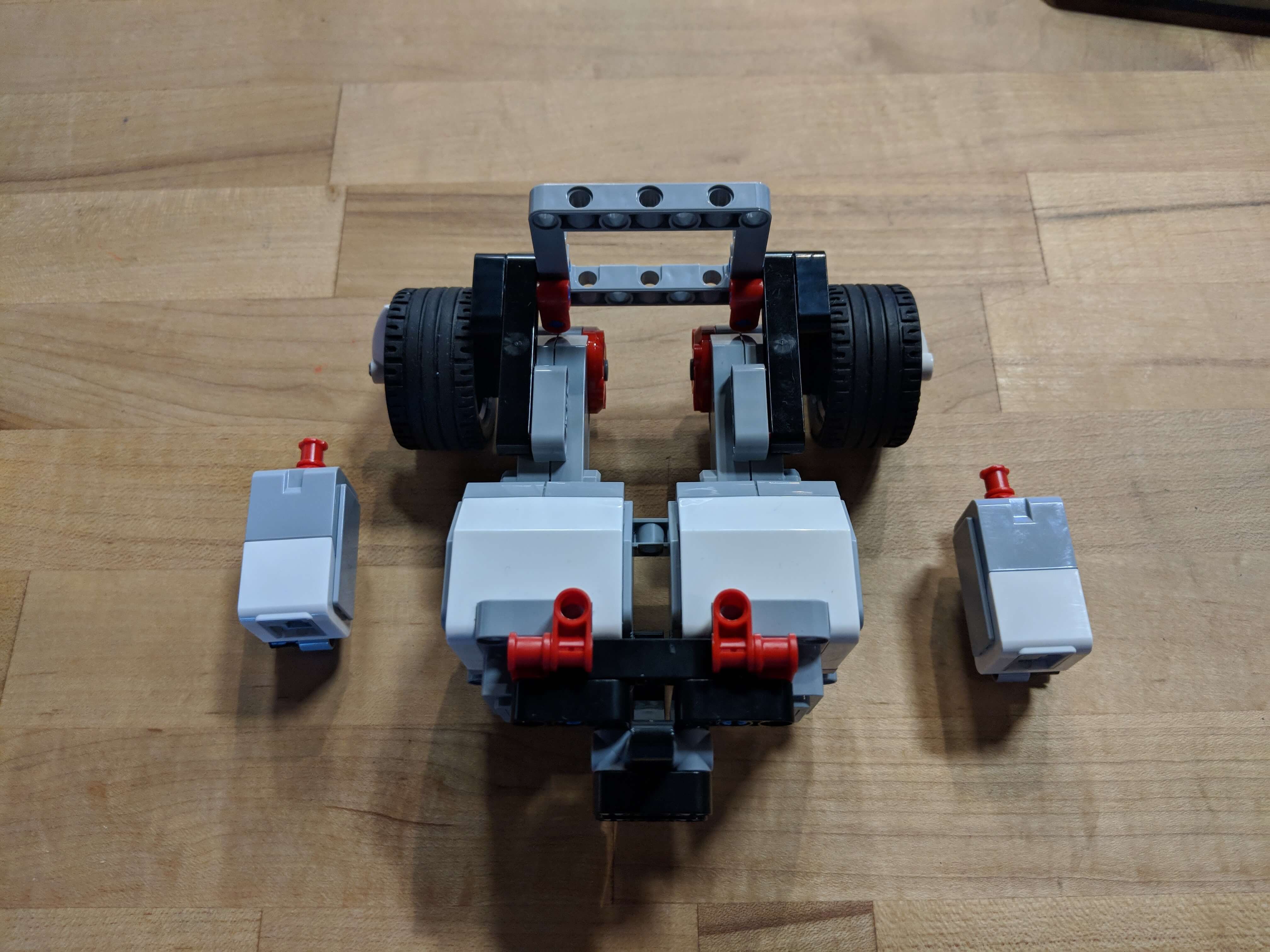
Получившийся элемент закрепим на передней балке нашего робота.
Lego mindstorms EV3 Home

Lego mindstorms EV3 Education

Наш учебный робот готов. Приступим к созданию программы робота-сумоиста. Замечательно, если у вас есть возможность отлаживать программу, используя ещё одного робота! Если же нет, то ничего страшного: можно задействовать в качестве соперника, например, радиоуправляемую модель автомобиля или те же кегли от «Кегельринга».
12.3. Создание программы для соревнования «Сумо».
Первая мысль, которая приходит в голову: использовать программу для «Кегельринга», внеся в неё косметические изменения. Действительно, алгоритмы поведения робота в «Кегельринге» и в «Сумо» очень похожи. Они реализуют поиск объекта и выталкивание его за пределы поля. Можно загрузить в робота-сумоиста программу для «Кегельринга», но работать такой сумоист будет не очень эффективно. Тем не менее, знания, полученные на предыдущем уроке, пригодятся нам сейчас.
Настало время загрузить в среду программирования наш проект «lessons-2», создать в нём новую программу «lesson-12» и подключить робота к среде программирования.
Поведенческую модель робота-сумоиста можно условно разделить на две части: поиск соперника и атака соперника. Сначала займемся реализацией первой части — поиска соперника.
Подробно пропишем последовательность действий нашего робота при обнаружении соперника на поле:
- вращаться вокруг своей оси, пока впереди расположенный датчик не обнаружит соперника;
- остановиться напротив соперника.
Эта последовательность действий полностью повторяет алгоритм поиска роботом кегли в «Кегельринге», но, так как, расстояние между роботами в «Сумо» может превышать расстояние от робота до кегли, то нам необходимо выбрать другое пороговое значение для используемого датчика.
Установим соперников на поле напротив друг друга, как показано на рисунке ниже.

Такое положение практически соответствует максимальному удалению роботов друг от друга во время состязания, поэтому текущее показание датчика, измеряющего расстояние до соперника можно взять за пороговое. Важно: так как пороговое значение будет достаточно большим — необходимо чтобы за пределами поля на расстоянии около 1 м. во время работы робота также отсутствовали посторонние предметы, способные помешать поиску.
На «Странице аппаратных средств», находящейся в правом нижнем углу среды программирования, выберем вкладку «Представление порта» (Рис. 1, 2 поз. 1) и снимем показание датчика, определяющего расстояние до соперника, установив соответствующий режим отображения показаний.
В нашем случае ультразвуковой датчик в режиме «Расстояние в сантиметрах» показывает значение — 56,1 (Рис. 1 поз. 2). За пороговое значение примем число — 57.

Рис. 1
Инфракрасный датчик в режиме «Приближение» показывает значение — 68 (Рис. 2 поз. 2). За пороговое значение примем число — 70.

Рис. 2
По аналогии с «Кегельрингом» мы можем запрограммировать нахождение роботом соперника, только, чтобы немного дистанцироваться от предыдущего урока, изменим направление вращения робота на противоположное:
Ультразвуковой датчик
- Для того, чтобы заставить робота вращаться вокруг своей оси, воспользуемся программным блоком «Независимое управление моторами» «Зеленой палитры», Режим работы блока установим «Включить», значение мощности для порта «B» установим равным -30, значение мощности для порта «C» установим равным 30 (Рис. 3 поз.1).
- Для поиска соперника используем программный блок «Ожидание» «Оранжевой палитры» в режиме «Ультразвуковой датчик — Сравнение — Расстояние в сантиметрах» с пороговым значением срабатывания датчика, равным 57 (Рис. 3 поз. 2).
- После того, как робот окажется напротив соперника, используя программный блок «Независимое управление моторами» «Зеленой палитры» выключим моторы (Рис. 3 поз. 3).

Рис. 3
Инфракрасный датчик
- Для того, чтобы заставить робота вращаться вокруг своей оси, воспользуемся программным блоком «Независимое управление моторами» «Зеленой палитры», Режим работы блока установим «Включить», значение мощности для порта «B» установим равным -30, значение мощности для порта «C» установим равным 30 (Рис. 4 поз.1).
- Для поиска соперника воспользуемся программным блоком «Ожидание» «Оранжевой палитры» в режиме «Инфракрасный датчик — Сравнение — Приближение», с пороговым значением срабатывания датчика, равным 70 (Рис. 4 поз. 2).
- После того, как робот окажется напротив соперника, используя программный блок «Независимое управление моторами» «Зеленой палитры» выключим моторы (Рис. 4 поз. 3).

Рис. 4
На этапе отладки этого алгоритма вам придется, подбирая значения «Мощность» моторов «B» и «C» а также пороговое значение датчика, добиться от вашего робота точного обнаружения и остановки строго напротив соперника. Только после этого можно будет переходить к программной реализации алгоритма атаки.
Если поиск соперника в «Сумо» очень похож на поиск кегли в «Кегельринге», то выталкивание соперника имеет важное отличие! Начиная атаку, первое, что необходимо сделать, это прямолинейно устремиться на максимальной мощности моторов в сторону обнаруженного соперника, проверяя датчиком цвета обнаружение границы ринга. Но ведь наш соперник тоже может двигаться! Поэтому вполне возможна ситуация, когда соперник выйдет в сторону из-под направления нашей атаки. В этом случае, наш робот, промахнувшись, будет двигаться в сторону границы ринга, теряя соперника и драгоценное время.

Следовательно, нам необходимо во время прямолинейного движения вперед анализировать оба датчика и прекращать атаку в случае, если робот потеряет соперника ИЛИ робот достигнет границы ринга. Поэтому нам необходимо отказаться от использования программного блока «Ожидание» «Оранжевой палитры» и самостоятельно в цикле получать и обрабатывать показания двух датчиков.
Приступим к поэтапной реализации алгоритма атаки соперника: для этого создадим в проекте временную программу «lesson-12-1» и начнем её наполнение программными блоками.
- Возьмем программный блок «Цикл» «Оранжевой палитры».
- Внутрь блока «Цикл» поместим программный блок «Независимое управление моторами» «Зеленой палитры». Режим работы блока установим в значение «Включить» (Рис. 5 поз. 1), мощности моторов «B» и «C» установим в максимальное значение — 100 (Рис. 5 поз. 2).

Рис. 5
- Следом за блоком «Независимое управление моторами» поместим программный блок «Датчик цвета» «Желтой палитры». Режим работы блока установим в значение «Сравнение — Яркость отраженного света» (Рис. 6)

Рис. 6
В этом режиме программный блок «Датчик цвета» «Желтой палитры» визуально очень похож на программный блок «Ожидание» «Оранжевой палитры» в режиме «Датчик цвета — Сравнение — Яркость отраженного света». Но, в отличие от блока «Ожидание», этот программный блок не ждет выполнения условия, указанного параметрами «Тип сравнения» (Рис. 7 поз. 1) и «Пороговое значение» (Рис. 7 поз. 2), а сразу выдает логическое значение («Истина» или «Ложь») в выходном параметре «Результат сравнения» (Рис. 7 поз. 3) и измеренное значение — в выходном параметре «Освещение» (Рис. 7 поз. 4).
Параметры «Тип сравнения» и «Пороговое значение» на Рис. 7 поз. 1, 2 установим таким образом, чтобы выходной параметр «Результат сравнения» (Рис. 7 поз. 3) выдавал логическое значение «Истина» при пересечении датчиком цвета черной границы ринга.

Рис. 7
- В случае использования ультразвукового датчика за блоком «Датчик цвета» установим программный блок «Ультразвуковой датчик» «Желтой палитры». Режим работы блока установим в значение «Сравнение — Расстояние в сантиметрах» (Рис. 8 поз. 1). Параметр «Тип сравнения» (Рис. 8 поз. 2), параметр «Пороговое значение» (Рис. 8 поз. 3) установим таким образом, чтобы выходной параметр «Результат сравнения» (Рис. 8 поз. 4) выдавал логическое значение «Истина» в случае потери из виду роботом соперника.
")
Рис. 8
В случае использования инфракрасного датчика за блоком «Датчик цвета» установим программный блок «Инфракрасный датчик» «Желтой палитры». Режим работы блока установим в значение «Сравнение — Приближение» (Рис. 9 поз. 1). Параметр «Тип сравнения» (Рис. 9 поз. 2), параметр «Пороговое значение» (Рис. 9 поз. 3) установим таким образом, чтобы выходной параметр «Результат сравнения» (Рис. 9 поз. 4) выдавал логическое значение «Истина» в случае потери из виду роботом соперника.
") Рис. 9
Рис. 9
Давайте ещё раз проанализируем промежуточный код нашего алгоритма атаки: мы включили моторы на максимальную мощность и движемся вперед, постоянно в цикле опрашивая датчики. Если наш робот пересечет черную линию границы ринга, то значение выходного параметра «Результат сравнения» «Датчика цвета» примет значение «Истина». Если наш робот потеряет соперника, то значение выходного параметра «Результат сравнения» датчика, следящего за соперником, также примет значение «Истина». В любом из этих случаев нам следует прекратить атаку, завершив наш цикл. В этом нам поможет программный блок «Логические операции» «Красной палитры». Познакомимся с этим блоком подробнее: программный блок «Логические операции» предназначен для выполнения операций над логическими данными (Рис. 10).

Рис. 10
Выбранный режим программного блока «Логические операции» «Красной палитры» определяет одну из четырех операций над логическими данными: «И (AND)», «ИЛИ (OR)», «Исключающее ИЛИ» и «Исключение (NOT)». Два входных параметра «a» и «b» (для операции «Исключение (NOT)» — один входной параметр «a») передают в программный блок входные значения, а результирующее значение выдается выходным параметром «Результат». Если вы ранее не сталкивались с логическими операциями, то можете ознакомиться с базовыми знаниями в прилагаемой справке под спойлером.
Логические операции осуществляются только над логическими значениями (данными), результатом логической операции также является логическое значение. Логическое значение может находиться в одном из двух состояний: «Истина» или «Ложь». Логические операции очень часто записываются в табличной форме в виде: «входной параметр 1» — «входной параметр 2» = «результат». Логические операции, реализуемые программным блоком «Логические операции» «Красной палитры» в табличной форме можно записать следующим образом:
Логическая операция «И (AND)»
Результатом логической операции «И (AND)» будет значение «Истина» только, если оба входных значения равны «Истина», во всех других случаях значение операции равно «Ложь».
| «a» | операция | «b» | результат | |
| «Ложь» | «И (AND)» | «Ложь» | = | «Ложь» |
| «Ложь» | «И (AND)» | «Истина» | = | «Ложь» |
| «Истина» | «И (AND)» | «Ложь» | = | «Ложь» |
| «Истина» | «И (AND)» | «Истина» | = | «Истина» |
Логическая операция «ИЛИ (OR)»
Результатом логической операции «ИЛИ (OR)» будет значение «Ложь» только, если оба входных значения равны «Ложь», во всех других случаях значение операции равно «Истина».
| «a» | операция | «b» | результат | |
| «Ложь» | «ИЛИ (OR)» | «Ложь» | = | «Ложь» |
| «Ложь» | «ИЛИ (OR)» | «Истина» | = | «Истина» |
| «Истина» | «ИЛИ (OR)» | «Ложь» | = | «Истина» |
| «Истина» | «ИЛИ (OR)» | «Истина» | = | «Истина» |
Логическая операция «Исключающее ИЛИ»
Результатом логической операции «Исключающее ИЛИ» будет значение «Истина» только, если одно из входных значений равно «Истина», во всех других случаях значение операции равно «Ложь».
| «a» | операция | «b» | результат | |
| «Ложь» | «Исключающее ИЛИ» | «Ложь» | = | «Ложь» |
| «Ложь» | «Исключающее ИЛИ» | «Истина» | = | «Истина» |
| «Истина» | «Исключающее ИЛИ» | «Ложь» | = | «Истина» |
| «Истина» | «Исключающее ИЛИ» | «Истина» | = | «Ложь» |
Логическая операция «Исключение (NOT)»
Логическая операция «Исключение (NOT)» применяется только к одному входному значению. Результатом логической операции «Исключение (NOT)» над входным значением является противоположное значение.
| «a» | операция | результат | |
| «Ложь» | «Исключение (NOT)» | = | «Истина» |
| «Истина» | «Исключение (NOT)» | = | «Ложь» |
- За программным блоком «Ультразвуковой датчик» или «Инфракрасный датчик» поместим программный блок «Логические операции» «Красной палитры».
- Выходной параметр «Результат сравнения» программного блока «Датчик цвета» (Рис. 11, 12 поз. 1) соединим с входным параметром «a» программного блока «Логические операции» (Рис. 11, 12 поз. 4).
- Выходной параметр «Результат сравнения» программного блока «Ультразвуковой (инфракрасный) датчик» (Рис. 11, 12 поз. 2) соединим с входным параметром «b» программного блока «Логические операции» (Рис. 11, 12 поз. 5).
- Режим работы программного блока «Логические операции» установим в «ИЛИ (OR)» (Рис. 11, 12 поз. 3). В этом случае результат выполнения логической операции будет принимать значение «Истина», только если будет выполнено одно из условий: датчик цвета пересёк черную линию, робот потерял соперника.
- Установив режим программного блока «Цикл» в значение «Логическое значение» (Рис. 11, 12 поз. 7), выходной параметр «Результат» программного блока «Логические операции» (Рис. 11, 12 поз. 6) соединим с входным параметром «Пока не будет истина» программного блока «Цикл» (Рис. 11, 12 поз.
 . Данные настройки завершат выполнение цикла при «Истинном» результате выполнения логической операции.
. Данные настройки завершат выполнение цикла при «Истинном» результате выполнения логической операции.
 . Данные настройки завершат выполнение цикла при «Истинном» результате выполнения логической операции.
. Данные настройки завершат выполнение цикла при «Истинном» результате выполнения логической операции.") Рис. 11
Рис. 11
")
Рис. 12
Давайте протестируем получившийся алгоритм атаки! Для этого поместим нашего робота внутрь ринга, напротив установим неподвижного соперника и запустим программу атаки на выполнение. Наш робот должен уверенно вытолкать соперника за пределы ринга и остановиться над черной границей поля. Получилось? Значит наш сумоист верно контролирует границу ринга.
Проведем второй эксперимент: снова установим напротив робота неподвижного соперника и запустим программу атаки. Когда наш робот устремится к сопернику и приблизится достаточно близко, резко уберём соперника в сторону. Наш робот должен, потеряв соперника, остановиться.
Подведем итог: мы реализовали алгоритм поиска соперника и успешно его протестировали, также прошел проверку алгоритм атаки.
Законченная программа сумоиста должна в бесконечном цикле выполнять последовательно поиск соперника, а затем — атаку соперника. Можно было бы уже объединить обе части нашей программы, если бы не одно маленькое дополнение. Если наш робот остановился над границей ринга, то перед тем, как начать поиск, роботу следует, отъехав немного назад, вернуться внутрь ринга. Дополним нашу программу атаки следующим кодом: за пределами цикла атаки, воспользуемся программным блоком «Переключатель» «Оранжевой палитры». Режим работы блока «Переключатель» установим в «Датчик цвета — Сравнение — Яркость отраженного света». Параметры «Тип сравнения» и «Пороговое значение» установим аналогично ранее используемым в программном блоке «Датчик цвета» «Желтой палитры». Следовательно, если наш робот остановился над черной линией, то выполнение будет передано верхнему контейнеру программного блока «Переключатель». Именно в верхний контейнер поместим программный блок «Рулевое управление» «Зеленой палитры», с настройками параметров, заставляющими робота отъехать назад на один оборот моторов. В нижний контейнер программного блока «Переключатель» поместим программный блок, выключающий моторы (Рис. 13). Повторно протестировав алгоритм атаки, убедимся, что после того, как робот-сумоист вытолкал соперника за пределы ринга, он вернулся немного назад.

Рис. 13
Вот теперь можно завершить разработку программы для робота-сумоиста. Внутрь бесконечного цикла последовательно вложим программу поиска соперника, а затем программу атаки соперника. Попробуйте выполнить эту работу самостоятельно, не подглядывая в решение.
Программа робота-сумоиста
")
Заключение:
Программа, которую мы разобрали с вами на этом уроке, реализует только один прямой силовой алгоритм поведения робота-сумоиста. Она подразумевает, что в прямом силовом противостоянии робот должен непременно одолеть своего соперника. Но наш учебный робот, конечно же, совсем не похож на мускулистого борца-сумо. Для того, чтобы уверенно выступить в этом состязании, необходимо уделить самое пристальное внимание в первую очередь конструкции робота, создать прочную, защищенную платформу, с помощью дополнительных ведущих колес или гусениц повысить сцепление с поверхностью ринга. На популярном видеохостинге Youtube.com по запросу «сумо lego роботов» можно найти множество видеороликов с реальных соревнований роботов, из которых вы непременно почерпнёте для себя интересные идеи для реализации в собственных конструкциях.
Главная же цель этого урока — на практическом примере показать вам метод непрерывной обработки показаний от пары датчиков. Можно ли усовершенствовать нашу программу? Безусловно! Например, используя программный блок «Случайное значение» «Красной палитры», изменить алгоритм поиска соперника таким образом, чтобы задавать случайное вращение робота влево или вправо, тем самым, дезориентируя соперника. Попробуйте самостоятельно встроить в нашу программу этот дополнительный код. Подумайте так же над тем, какие изменения нужно внести в прорамму, в случае проведения соревнования на черном ринге с белой границей. Возможно, что у вас появятся собственные идеи улучшения: поделитесь ими в комментариях к уроку!
Для победы в боевых соревнованиях по робототехнике необходимо правильно собрать робота сумо ev3.
Базовое поведение робота в «Сумо» очень похоже на поведение робота в «Кегельринге». Роботу также необходимо найти внутри поля объект и вытолкать его за пределы круга.
Искать соперника нам по-прежнему будет помогать один из датчиков, способных определять предметы на расстоянии (ультразвуковой), а своевременно определять черную границу поля будем с помощью датчика цвета.
Для того чтобы лего-боец сумо смог уловить направление движения и стратегию ведения борьбы, включается датчик цвета. С его помощью бот доходит до черной черты с последующим включением задней передачи. Если на протяжении одной секунды ситуация остается без изменений, «сумоист» останавливается автоматически.
Перейти к содержанию
В этой работе нужно собрать робота боксера (сумоиста), запрограммировать датчик касания, ультразвуковой датчик и датчик цвета в соответствии с регламентом соревнования. Задача — вытолкнуть соперника из поля или победить его нокаутом.
Фото:




Оборудование: базовый набор Lego Mindstorms Education EV3.
Описание.
В конструкции используется кривошипно-шатунный механизм (КШМ) в приводе движения рук, два ведущих колеса от больших сервомоторов. Передняя шаровая опора и задняя скользящая опора делают робота устойчивым к опрокидыванию.
Датчик касания необходим для удобного старта. Ультразвуковой датчик с помощью эхолокации обнаруживает соперника. Датчик цвета необходим для обнаружения границы поля в виде черной линии.
Язык программирования: EV3-G.
Примеры:


Для подписчиков (старый способ)
Чтобы скачать файлы, вы должны зарегистрироваться или войти на сайт, а также иметь платный аккаунт доступа. Если у вас есть действующий аккаунт доступа, ниже увидите кнопку для загрузки.
Аккаунт доступа «Lego EV3 (архивный способ оплаты)»
LegoEV3 12 мес.
1301
Архивный способ оплаты. Скачать инструкции можно на сайте market.robo-wiki.ru
( 2 оценки, среднее 5 из 5 )
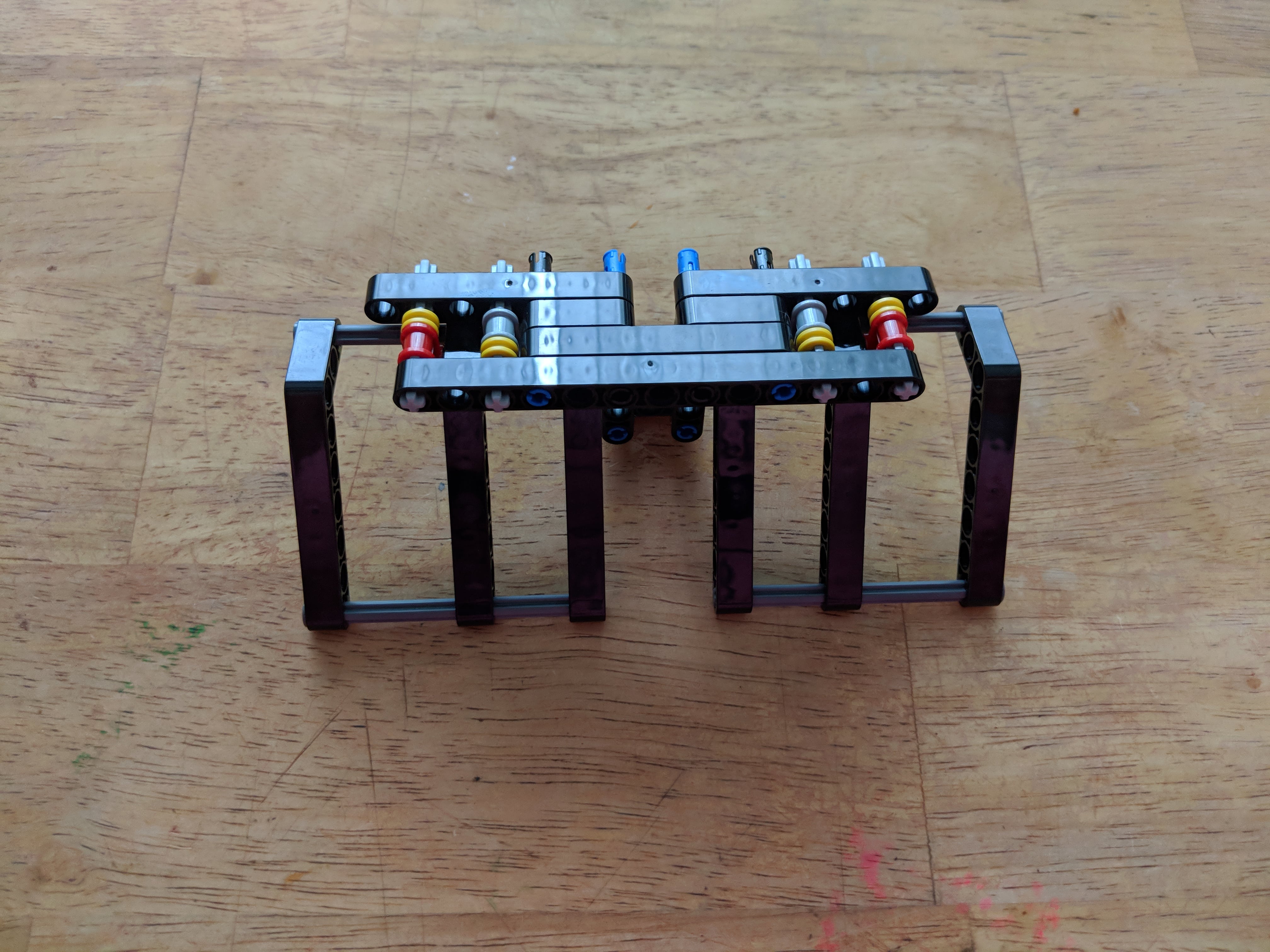
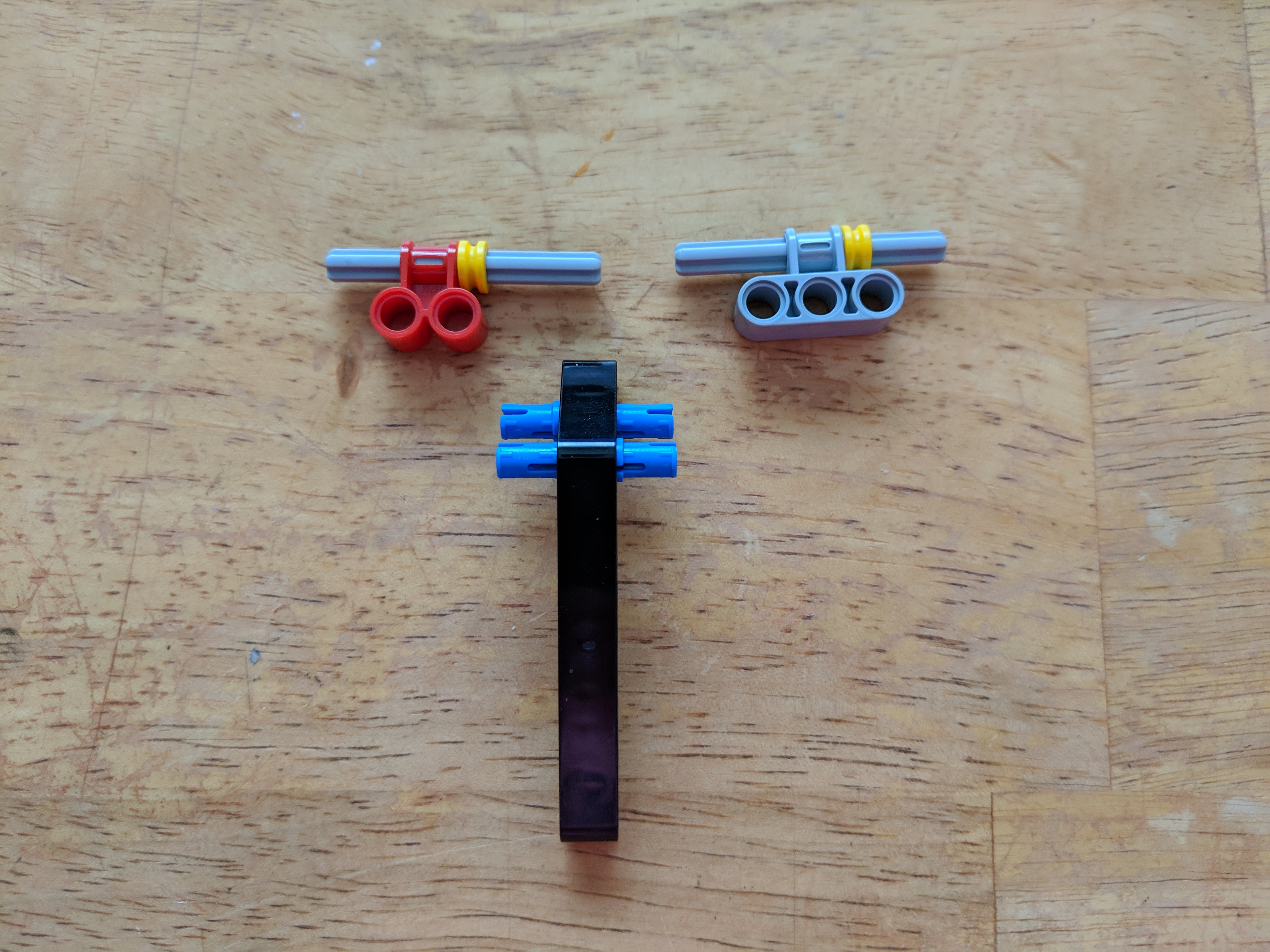
This robot is a simplified spinoff of the Box Robots (Box Robot 1 and Box Robot 2). It may be build with a single set, but it will require extra technic beams 7×5 with open centers.
The name of the robot — «Squmo» is derived from the ancient tradition of connecting two words to make on and hense — «Square sumo» because «Squmo».
This material requires a subscription to one of the following plans:
- FLLCasts Personal B One Year
- FLLCasts Team Six months
- FLLCasts School Student One Year
- FLLCasts School
- #591
- 09 Jan 2019
- LEGO MINDSTORMS, LEGO MINDSTORMS EV3
- Sumo, Vehicle, EV3, Vehicle, Fun, Construction
- Info
- Bill of materials
- Editing
To construct this you will need
- LEGO Mindstorms EV3 45544 Education Core
- LEGO Mindstorms EV3 45560 Education Resource
Bill of materials (Parts list)
Modules Navigation
Москва, ул. Ленинская слобода,
дом 26, корпус С, офис 303
Обновлено: 18.05.2023
Обращаем Ваше внимание, что в соответствии с Федеральным законом N 273-ФЗ «Об образовании в Российской Федерации» в организациях, осуществляющих образовательную деятельность, организовывается обучение и воспитание обучающихся с ОВЗ как совместно с другими обучающимися, так и в отдельных классах или группах.
Обращаем Ваше внимание, что c 1 сентября 2022 года вступают в силу новые федеральные государственные стандарты (ФГОС) начального общего образования (НОО) №286 и основного общего образования (ООО) №287. Теперь требования к преподаванию каждого предмета сформулированы предельно четко: прописано, каких конкретных результатов должны достичь ученики. Упор делается на практические навыки и их применение в жизни.
Мы подготовили 2 курса по обновлённым ФГОС, которые помогут Вам разобраться во всех тонкостях и успешно применять их в работе. Только до 30 июня Вы можете пройти дистанционное обучение со скидкой 40% и получить удостоверение.
Пахомов Максим Семенович, учитель математики и информатики
МБОУ « АМ Саха-Бельгийская гимназия », с.Ке птени , Усть-Алданский райо н , Республики Саха(Якутия)
Программирование робота «Сумо» конструктора LEGO на базе MINDSTORMSEV 3
Робототехника быстро становится неотъемлемой частью учебного процесса, потому что она легко вписывается в школьную программу обучения по техническим предметам. Ключевые опыты в физике и математике можно наглядно показать с помощью лего роботов.
Робототехника поощряет детей мыслить творчески, анализировать ситуацию и применять критическое мышление для решения реальных проблем. Работа в команде и сотрудничество укрепляет коллектив, а соперничество на соревнованиях дает стимул к учебе. Возможность делать и исправлять ошибки в работе самостоятельно заставляет школьников находить решения без потери уважения среди сверстников.
Робототехника в школе приучает детей смотреть на проблемы шире и решать их в комплексе. Созданная модель всегда находит аналог в реальном мире. Задачи, которые ученики ставят роботу, предельно конкретны, но в процессе создания машины обнаруживаются ранее непредсказуемые свойства аппарата или открываются новые возможности его использования. Различные языки программирования графическими элементами помогают школьникам мыслить логически и рассматривать вариантность действия робота. Обработка информации с помощью датчиков и настройка датчиков дают школьникам представление о различных вариантах понимания и восприятия мира живыми системами.
В частности мы рассмотрим программу, составленную для соревнования лего робота к категории «Сумо».
Цель: Научить учащихся к самостоятельному программированию робота сумоиста, с минимальным применением датчиков: датчика света и инфракрасного датчика для дальнейшего участия в конкурсе «Робото-Сумо».
Задача работы: Ознакомить учащихся с самым простым способом программирования робота сумо.
Новизна: По новым требованиям ФГОС нового поколения введены новые направления в дополнительном образовании. Направление «Робототехника» представляет собой конструирование и программирование робота, т.е. развивает малую моторику, технические навыки у учащихся, а также укрепляет межпредметную связь.
Данная работа представляет собой краткую инструкцию программирования робота. В соревнованиях побеждает тот, кто выталкивает робота соперника за черный круг. Конструирование данного робота ссылается на сборку стандартного гусеничного робота по инструкции LEGOMINDSTORMSEV 3 с дополнительным применением датчика света, для определения границы поля, и инфракрасного датчика, для определения цели и направления движения.

По регламенту соревнования роботы должны находиться внутри круга с диаметром 100 см с черной границей в 2 см, в середине круга расположены две линии старта, после сигнала они должны стоять на линии в течение 5 секунд, только потом начинать движения, поэтому необходимо использовать оператор времени, настроив его на время.
Неопределенность этого соревнования заключается в том, что направления робота определяется судьей.

Во избежание того, что робот пройдет мимо (в случае, когда используется прямое движение) используем оператор «цикл» с использованием независимое управления моторами для поворота на месте.
Настроим его так, чтобы двигатель A двигался c максимальной скоростью вперед, а двигатель B c максимальной скоростью назад. Тем самым независимое управление моторами даст роботу поворачиваться на одной оси.
Во избежание того, что робот будет стоять и кружиться на одном месте в операторе цикл используем инфракрасный датчик для определения цели, настроив егок порту 1 на «Приближение» меньше или равно 50 см, так как роботы будут стоять в центре круга с диаметром 1м.

Таким образом, максимальная расстояние между нами не будет превышать 100 см, так как линия старта будет в середине поля, то расстояние между роботами будет меньше 50 см.

Далее, как только датчик расстояния заметит перед собой цель, программа переключается на независимое управление моторами, движением вперед моторами A и B . Для этого просто включим оператор управления с независимыми моторами присоединённых к порту A и B , на движение вперед. Тем самым обеспечив роботу движение вперед.

Прямое движение робота рано или поздно приведет его к черной линии, во избежание выхода из границы (поля сражения) используем датчик цвета. Настроим датчик для определения черного цвета к порту 2.

Для этого настраиваем его на определение черного цвета, как только датчик дойдет до черной линии включается мотор с движением назад (настроим независимые двигатели движения назад в течение 1 секунды) и автоматически останавливается.

После того как настроим все порты к моторам и к датчикам наша программа для соревнования сумо-роботов целиком будет иметь следующий вид с применением 2 моторов и датчика света с инфракрасным датчиком
Список использованной литературы:
1. Инструкция по сборке робота TRACK 3 R 01 Прицельное измельщение С.1-17.
Приведена схема и инструкция по сборке полно приводного мощного робота lego ev3 для соревнований сумо.В соревновании сумо роботов lego робот должен вытолкнуть робота соперника за круг, при этом самому остаться в круге. Чтобы обнаруживать робота соперника необходим датчик расстояния, чтобы не вылететь за границу круга необходим датчик цвета. Робот Lego сумо должен иметь поддевающий или толкающий ковш и обладать хорошей мощностью. На основе опыта участия в соревнованиях лего сумо создана данная модель робота ev3 сумо, такая модель и ее модификации помогут вам успешно выступать в соревнованиях сумо роботов. Программа для сумо lego роботов
Инструкция сборки робота lego ev3 для сумо

1

2

3

4
Полный привод собирается на 3 крупных шестеренках, которые сжимаются двумя длянными балками

5

6

7
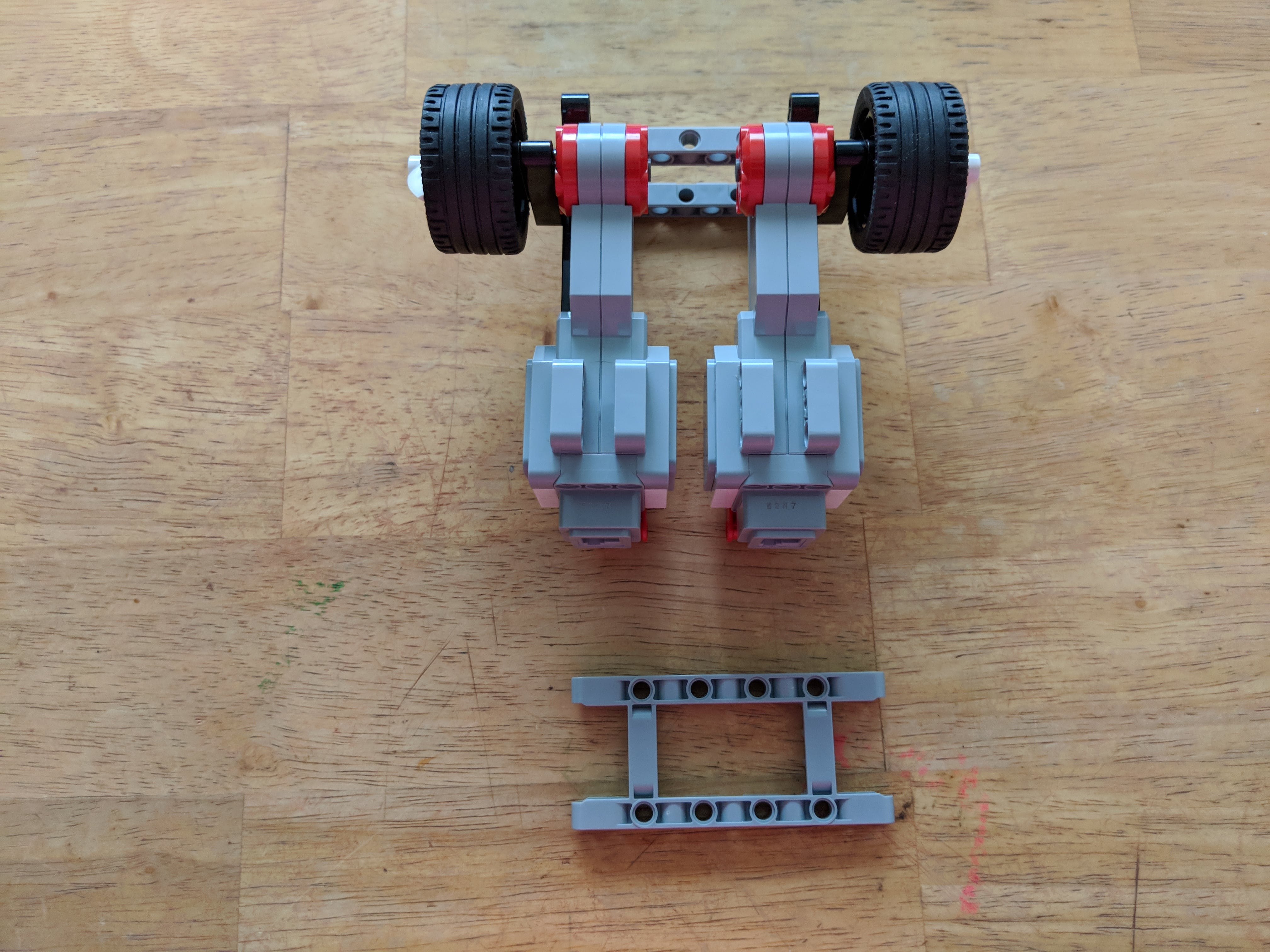
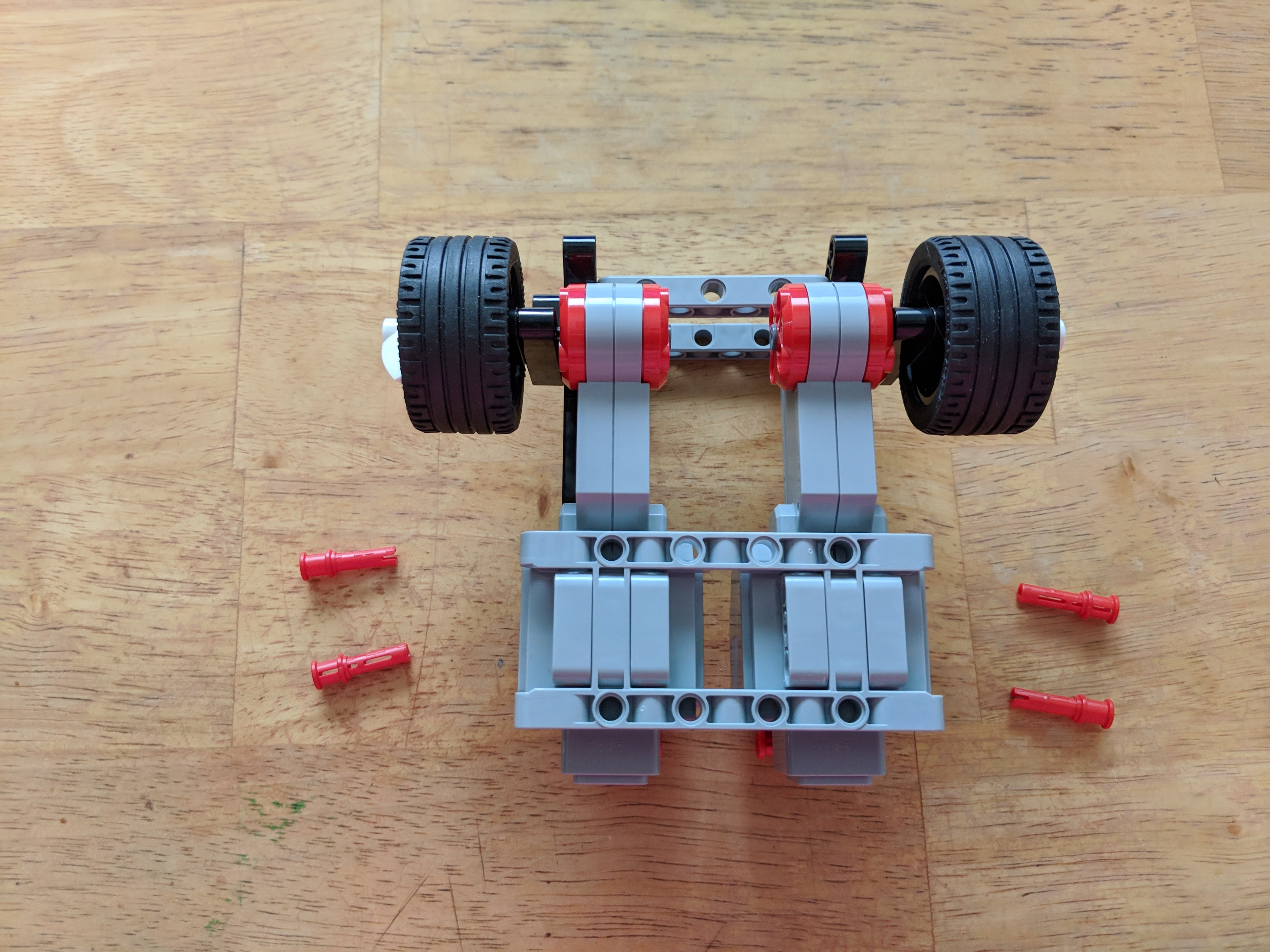
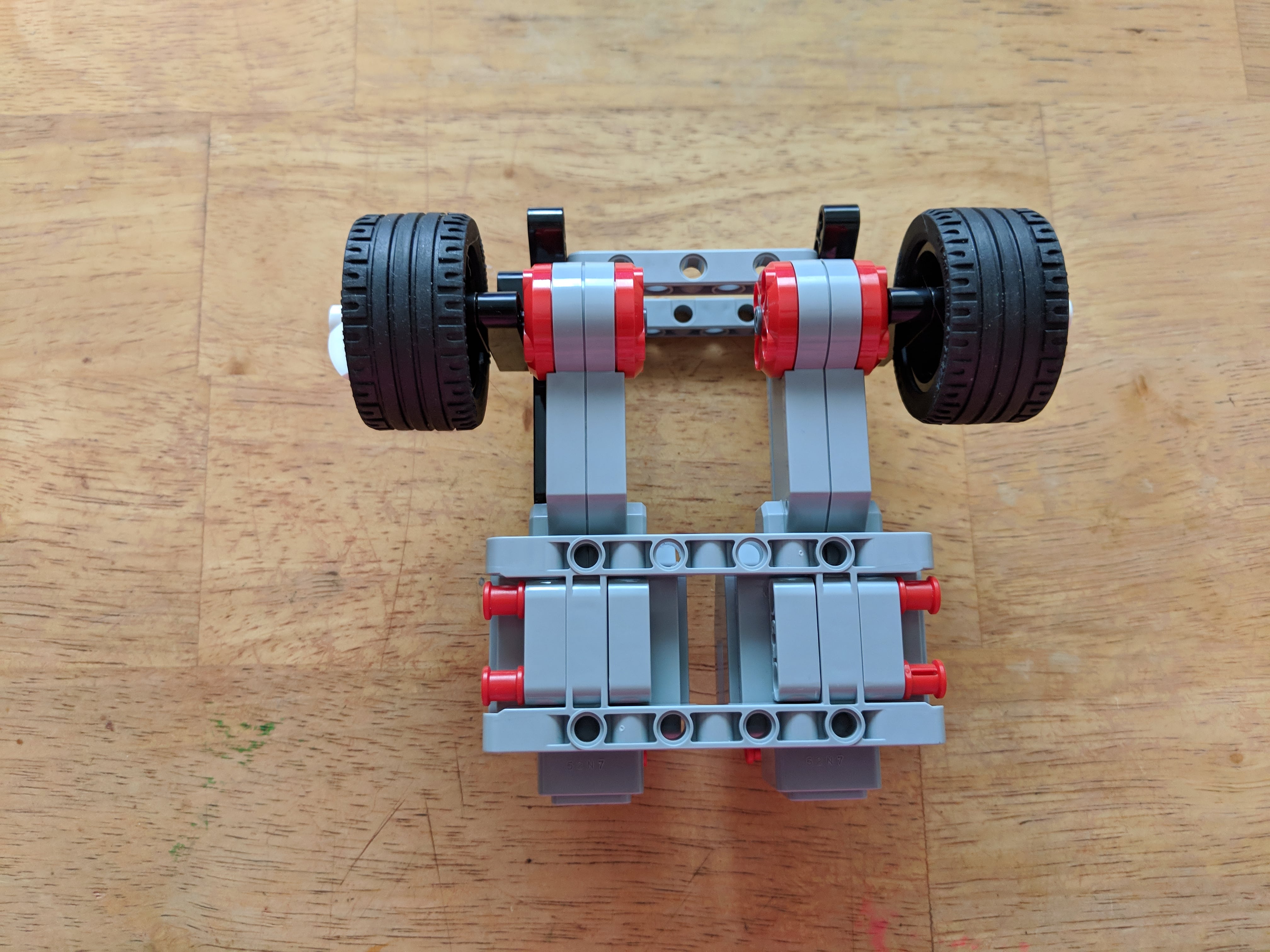
Крепим колеса к роботу лего сумо и прикрепляем прямоугольную рамку к боковой стороне вертикальной прямоугольной рамки

8

9
Сборка поддевающего ковша робота ev3 сумо

10

11

12

13

14

15
Собираем правую сторону робота ev3 сумо

16

17

18

19

20

21

22

23

24

25
Подсоединяем проводами моторы к портам A и B датчик цвета к порту 3 датчик расстояния к порту 4

26
Вы можете также познакомиться с другой схемой робота для лего сумо собранной на основе мощного редуктора и больших колес
Сумо — одно из самых увлекательных соревнований роботов Лего Ev3 . В данном соревновании робот должен вытолкнуть робота противника за круг при этом самому не выехать за границу круга.
В самом начале соревнования роботы ставятся в центр круга, после страта программы запускаются и роботы должны подождать 3 секунды, после этого роботы должны доехать до границы круга и только потом они имеют возможность атаковать противника. На портале приведены схемы роботов для лего сумо Мощный сумо робот и инструкция по сборке Полноприводный сумо робот лего
Опишем алгоритм и программу Сумо для робота EV3
Робот ждёт 3 секунды, отъезжаем от центра круга до границы, едем вперёд, крутимся, ищем врага, едем до врага, если едем от границы то отъезжаем назад.
Ставим ожидание на 3 секунды.

2 Действие. Отъезжаем назад, до границы.

3 действие. После того как робот отъехал до границы он должен выдвинуться вперед . Движение вперёд.

4 Действие. Ставим бесконечный цикл. Робот будет атаковать врага, пока его не вытолкнет или пока не закончится время соревнования.
в него ставим цикл вращение c ультразвуковым датчиком. (можно использовать и инфракрасный датчик)

5 Действие. Едем вперёд до тех пор, пока датчик цвета не увидит чёрную линию, границу круга.

6 . Действие После того как увидели границу мы отъезжаем назад.
Напишите отъезд назад сами, используя урок 1.Движение и повороты EV3
Вернуться к содержанию Перейти к уроку Движение по черной линии с одним датчиком
немножко не понятно, но все равно благодарен автору, просьба объясните это все одна программа без других начал, если да то он должен в себя включать все циклы и можно ли его полностью включить в один повторяющийся цикл, подскажите пожалуйста, и если у когото он получился можете пожалуйста скинуть
Первых два действия пишем последовательно это отъезд назад и езда вперед.А дальше ставится бесконечный цикл и в этом бесконечном цикле действие 4 поиск врага, действие 5 едем вперед до линии и отъезд назад Все это в бесконечном цикле
Для победы в боевых соревнованиях по робототехнике необходимо правильно собрать робота сумо ev3, инструкция по сборке поможет в этом. Результативность обеспечивается задействованием всех функциональных возможностей, включая датчики расстояния, цвета, толкающие и поддевающие ковши. Роботы-участники представлены в базовых и усовершенствованных комплектациях (шагающие, гусеничные боты).
Необходимые детали для робота-сумо ev3
Модели для сумо состоят из следующих блоков и элементов:
- 3 большие шестеренки, скрепленные парой балок для полного привода;
- колеса;
- прямоугольная рамка для размещения боковой платформы;
- поддевающий и распорный ковши;
- моторы;
- датчики и портальные разъемы;
- конструкционные элементы (поперечины, крепеж, направляющие, продольные, диагональные рейки).
Датчики и моторы
Для робота предусмотрено два больших двигателя, подсоединяемые к портам «В» и «С». Движущая конструкция расположена во фронтальной части, моторы вращаются по часовой стрелке.
Полноценное функционирование ev3 невозможно без датчиков. У рассматриваемого конструктора применяется пять основных видов индикаторов:
- Инфракрасный маяк служит для передачи сигналов роботу. Он агрегирует с другими лего-ботами.
- Температурный датчик работает по принципу органов чувств человека и других живых организмов.
- Ультразвуковой индикатор реагирует на соперника, что важно на соревнованиях любого уровня.
- Индикатор цвета расширяет возможности робота, ориентируя его на ринге.
- Датчик касания — самый простой и важный элемент.
Одно состязание робо-сумо состоит из 3-х раундов, общая продолжительность которых составляет 3 минуты.
Программный блок
Стандартное ПО рассчитано на два больших мотора, два датчика (инфракрасный и цветовой). Работает программа по следующей схеме:
- «Ожидание» – 5 секунд.
- «Звуковой сигнал» – начало работы.
- Два цикла «Начало» и «Неограниченный» – старт движения.
- «Определение цвета» – по умолчанию робот видит черный колер; при этом механизм отъезжает на два вращения назад.
- «Управление рулевое» – корректируется количество оборотов.
- Режим «Нет цвета» – ведется расчет имеющихся препятствий, расстояния до них и последующих манипуляций.
- «Инфракрасный индикатор» – действует по принципу распознавания и приближения объектов.
- «Истина» – ветка, которая активируется, если до препятствия менее 60 единиц.
- «Лож» – противоположность восьмой позиции в списке.
- «Независимое управление» – на противоположных мощностях двигателей бот будет вертеться на месте, пока дистанция до соперника не станет менее 60 единиц.
Выставив указанные параметры, проводят тестирование робота ev3 для сумо.
Моторы большой и средний
Основной двигатель серверного типа сделан под NXT с увеличенной корпусной частью. Характеристики:
- оборотистость предельная (об./мин.) — 170;
- заданный/рабочий момент кручения (Н/см) — 40/20;
- индикатор поворотного угла – есть, погрешность – до одного градуса.
Средний сервомотор «ев3» базируется на Power Function, ориентирован на высокие скорости и низкие нагрузки. Параметры:
- максимум оборотов (об./мин.) — 250;
- крутящий момент (Н/см) — 12/8;
- энкодер, отвечающий за угол поворота с точностью до одного градуса.
Новый блок для соревнований настроен универсально, подходит для всех модификаций рассматриваемых конструкций.
Удаленный инфракрасный маяк
ИК-маяк может определять дистанцию до соперника, посылая сведения о примерном своем расположении и удаленности. Для использования функции потребуются батарейки типа «ААА».
Датчик цвета и прикосновения
Цветовой индикатор «сумоиста» отличает семь оттенков с возможностью определения отсутствия колера. Дополнительная функция – работа в режиме подсветки.
- улавливание красного и его окружающего фона;
- контроль разницы между контрастными оттенками;
- рабочая частота – 1 кГц.
Датчик касания фиксирует активацию или отпускание кнопки, подсчитывает число нажатий.
Инфракрасный сенсор
Этот индикатор позволяет определять не только оттенок, но и степень освещенности, дистанцию до ближайших предметов. В качестве контроллера выступает специальный блок, к которому подсоединяются сопутствующие «движки» и датчики.
Роботы-сумоисты могут иметь различную конфигурацию, однако, они должны соответствовать регламенту соревнований — находиться в пределах назначенного размера и веса.
Пошаговая инструкция по сборке
Собрать мощного робота-сумоиста Lego не сложно, если знать все операции по этапам.
Боевой бот Mindstorms ev3 конструируется следующим образом:
- Собирается передний привод с тремя большими шестернями и обжимной парой длинных балок.
- Крепятся колеса, горизонтальная и вертикальная прямоугольная рамка.
- Цепляется поддевающий ковш.
- Комплектуется вся правая сторона боевого робота для сумо.
- Подсоединяются датчики к моторам посредством проводов и специальных портальных гнезд.
Бота собирают в нескольких базовых исполнениях. Таблица ориентирует пользователей на выбор модели, подходящей для заданных целей, по сравнению с категорией Education.
| Характеристика | NXT | EV3 |
| Основной процессор | ARM AT91-SAM 7S256, Atmel. 48 МГц, «Флеш-память» – 256 кБ, RAM – 64 кБ | ARM9, 300 МГц, Память – 16/64 кБ |
| Вспомогательное ПО | «Восьмибитный» «Амтел», 8 МГц, «Флеш»/«РАМ» – 4,0/0,52 кБ | Не предусмотрено |
| Операционная система | Propietary | Linux |
| Ввод | Четыре гнезда с цифровыми и аналоговыми портами. Скорость – 9600 бит/с | Аналоговые и цифровые разъемы со скоростью 460,8 Кбит/с |
| Вывод | 3 | 4 |
| Передача сведений | Full speed 12 Мбит/с | High speed 480 Мбит/с |
| Способ подключения | Отсутствует | Wi-Fi, Flash (до трех носителей и передатчиков) |
| Чтение карт SD | Нет | miniSD до 32 Гб |
| Совместимость с мобильными девайсами | «Андроид» | «Андроид», iOS |
| Монитор | Монохромный LCD (100×64 Px) | LCD (178×128 Px) |
| Взаимодействие | Bluetooth, USB | Bluetooth 2.1, USB 2.0/1.1, Wi-Fi |
Коротко о программировании сумо-робота
Регламент состязаний предполагает расположение «бойцов» во внутреннем секторе круга. Диаметр арены составляет 1540 мм, черная приграничная окантовка имеет ширину 50 мм. В середине круга предусмотрены две стартовые линии. На них соревнующиеся машины должны выждать 5 секунд до того, как броситься в схватку. В связи с этим секундомер пуска настраивается с соответствующей задержкой.
«Фишка» подобных соревнований заключается в том, что программировать робота «на успех» не получится. Направление движения определяет судья. Во избежание попадания бота в «молоко» используется программа «Цикл» с независимым управлением.
Настройка предполагает создание для мотора «А» предельной скорости перемещения вперед. Соответственно, мотор «В» на гусеницах альтернативно вращается назад. Независимое управление позволяет вращаться конструкции в пределах одной оси.
Пользователь корректирует робота, вращая его на одной точке. В этом помогает инфракрасный датчик, определяющий цель. Используют опцию «Приближение», настроив дистанцию 0,5 м. Рабочий диаметр для сражения ботов составляет по диагонали 1,5 м.
В соответствии с правилами предельное расстояние между соперниками не превышает 1000 мм. Колесо каждого участника не должно заступать за стартовую линию. Уловив цель, индикатор передает сведения на микропроцессор. Включается независимое управление, робот начинает перемещаться вперед и в стороны.
Для того чтобы лего-боец сумо смог уловить направление движения и стратегию ведения борьбы, включается датчик цвета. С его помощью бот доходит до черной черты с последующим включением задней передачи. Если на протяжении одной секунды ситуация остается без изменений, «сумоист» останавливается автоматически.
После настройки всех портов с моторами и датчиками, программа представит собой схему, в которой задействованы два двигателя, индикаторы света и инфракрасного излучения на движение.
Обращаем Ваше внимание, что в соответствии с Федеральным законом N 273-ФЗ «Об образовании в Российской Федерации» в организациях, осуществляющих образовательную деятельность, организовывается обучение и воспитание обучающихся с ОВЗ как совместно с другими обучающимися, так и в отдельных классах или группах.
Обращаем Ваше внимание, что c 1 сентября 2022 года вступают в силу новые федеральные государственные стандарты (ФГОС) начального общего образования (НОО) №286 и основного общего образования (ООО) №287. Теперь требования к преподаванию каждого предмета сформулированы предельно четко: прописано, каких конкретных результатов должны достичь ученики. Упор делается на практические навыки и их применение в жизни.
Мы подготовили 2 курса по обновлённым ФГОС, которые помогут Вам разобраться во всех тонкостях и успешно применять их в работе. Только до 30 июня Вы можете пройти дистанционное обучение со скидкой 40% и получить удостоверение.
Столичный центр образовательных технологий г. Москва
Получите квалификацию учитель математики за 2 месяца
от 3 170 руб. 1900 руб.
Количество часов 300 ч. / 600 ч.
Успеть записаться со скидкой
Форма обучения дистанционная
Программирование, подготовка и комплектация борца-робота «СУМО» на базе конструктора Mindstorms LEGO EV 3.
Мы живем в веке информационных технологий, поэтому робототехника становится неотъемлемой частью учебного процесса. И если в рамках стандартной школьной программы мы изучаем теоретические основы программирования, то с помощью лего-роботов мы можем наглядно показать как выполняются те или иные функции.
Робототехника поощряет детей мыслить творчески, анализировать ситуацию и применять критическое мышление для решения реальных проблем. Работа в команде и сотрудничество укрепляет коллектив, а соперничество на соревнованиях дает стимул к учебе. Возможность делать и исправлять ошибки в работе самостоятельно заставляет школьников находить решения.
Робототехника в школе приучает детей смотреть на проблемы шире и решать их в комплексе. Созданная модель всегда находит аналог в реальном мире. Задачи, которые ученики ставят роботу, предельно конкретны, но в процессе создания машины обнаруживаются ранее непредсказуемые свойства аппарата или открываются новые возможности его использования. Различные языки программирования графическими элементами помогают школьникам мыслить логически и рассматривать вариантность действия робота. Обработка информации с помощью датчиков и настройка датчиков дают школьникам представление о различных вариантах понимания и восприятия мира живыми системами.
В данной статье, мы рассмотрим программирование, подготовку и комплектацию борца-робота «СУМО». По данному направлению в любом регионе России и в мире в целом постоянно проводятся всевозможные мероприятия.
Цель: Научить учащихся к самостоятельному программированию робота сумоиста, с применением датчиков: 2 датчика цвета, ультразвукового датчика и датчика касания для дальнейшего участия в соревнованиях борцов-роботов «СУМО».
Задача работы: Познакомить учащихся со способом программирования робота сумо.
Новизна: По новым требованиям ФГОС нового поколения введены новые направления в дополнительном образовании. Направление «Робототехника» представляет собой конструирование и программирование робота, т.е. развивает малую моторику, технические навыки у учащихся, а также укрепляет межпредметную связь.
Данная работа представляет собой инструкцию программирования робота с пояснениями.
· Роботы устанавливаются в центре круга (на линии старта) в любом направлении (кроме как внутрь круга)
· После включения программы робот ожидает 3 секунды и начинает выполнять программу
· Робот должен доехать до края площадки (белая или черная линия)
· Коснувшись линии робот приступает к поиску соперника
· В соревнованиях побеждает тот, кто выталкивает робота соперника за черный круг.
Конструкция данного робота будет наглядно приведена (изображения) в приложении к данной работе.

Рис. 1 Программа СУМО робота
По регламенту соревнования роботы должны находиться внутри круга с диаметром 122 см с черной или белой границей в 4 см, в середине круга расположены две линии старта, после сигнала они должны стоять на линии в течение 3 секунд, только потом начинать движения, поэтому необходимо использовать оператор времени, настроив его на время.

Рис. 2
Далее робот движется до белой или черной линии (границы круга)

Рис. 3
Коснувшись линии, робот приступает к поиску соперника. То есть начинаем кружиться вокруг. Это можно сделать с помощью блока независимого управления моторами, который так же будет действовать в цикле с постусловием. Но здесь мы будем использовать показания другого датчика в качестве условия. Ультразвуковой датчик отправляет ультразвуковой сигнал и замеряет скорость, за какой промежуток времени сигнал приходит обратно. Таким образом этот датчик в состоянии определить расстояние до объекта. Поскольку наше поле диаметром 122 см, наш робот продолжит выполнять программу после того, как обнаружит объект на расстоянии меньшем или равном 90 см.

Рис. 4
Далее, как только датчик расстояния заметит перед собой цель, программа переключается на независимое управление моторами, движением вперед моторамиA и B. Для этого просто включим оператор управления с независимыми моторами, присоединённых к порту A и B, на движение вперед. Тем самым обеспечив роботу движение вперед. Но не стоит забывать, что робот соперника, может совершить маневр, и мы проедем мимо него. Или попытавшись вытолкнуть соперника, наш робот сам может покинуть пределы площадки. Чтобы избежать этого нам помогут датчики цвета. В нашем роботе используется 2 датчика. Так как на практике столкнулись с ситуацией. Когда датчик, расположенный с одной стороны просто не успевает среагировать, когда робота выталкивают с площадки другой стороной. И это будет одной из самых сложных частей программы, так как для считывания информации параллельно с обоих датчиков, придется использовать логическую операцию и работу датчиков цвета разбирать во вложенном цикле. Потребуется логическая операция ИЛИ, известная каждому школьнику, и значение истинности одного из условий. После того, как один из датчиков цвета обнаружил линию черного или белого цвета ему необходимо отъехать назад от края площадки и вновь приступить к поиску противника.


Для того, чтобы нашего робота было не так просто вытолкнуть за пределы поля, если он не успел развернуться и увидеть робота, или если проехал мимо и оказался в невыгодном положении, когда робот соперника находится сзади и уже выталкивает с поля, мы используем датчик касания. Его работа будет выполняться в параллельном цикле, который начнет свое действие только тогда, когда будет произведено нажатие. И остановит выполнение основного цикла. После нажатия датчика робот совершит маневр разворота с радиусом, чтобы избежать своего соперника, при этом учитывая данные показаний датчиков цвета, чтобы не покинуть пределы площадки.

После чего мы начинаем выполнение основной программы. Таким образом получается следующее:
Читайте также:
- Лего стар варс tcs на андроид
- Как сделать русского солдата из лего
- К 700 кировец из лего
- Дэвид агилар протез из лего
- Lego jurassic park dlc