Содержание
- 1 Как собрать EV3 для проведения игр
- 2 Чем соревнование отличается от стандартного «Кегельринга»
- 3 Написание программы для «Кегельринга»
После базового робототехнического курса первые простейшие соревнования по плечу каждому начинающему технику. Научившись решать такие задачи робототехники, как сборка робота-тележки, получение и обработка информации датчиков, можно участвовать в состязании, где нужно выталкивать кегли (банки). Ключевая часть игры Кегельринг-квадро — программа для робота EV3.

Как собрать EV3 для проведения игр
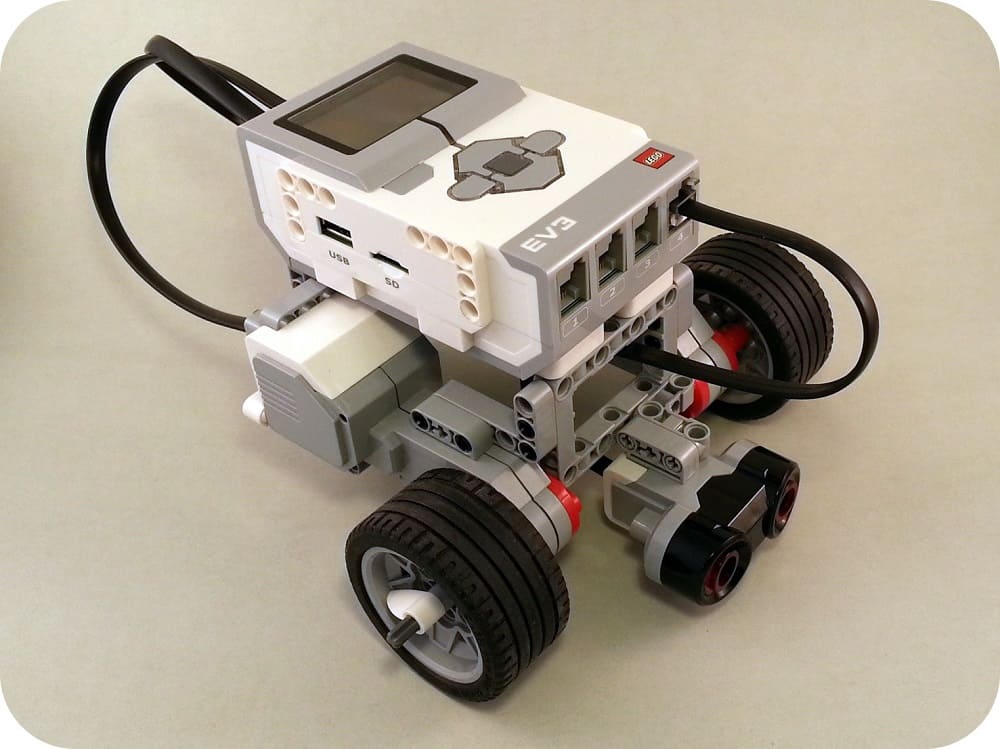
Инструкция по сборке робота-тележки «ЕВ3» (предыдущий конструктор NXT2) включает 7 шагов:
- Сначала нужно сделать раму для крепления моторчиков. Она состоит из 2-х белых балок с 15-ю отверстиями и 4-х серых длиной 11 и 9 отверстий. К белым, расположенным параллельно, крепятся 2 уголка с черными штифтами. Серые балки лежат поперек белых, их надевают сверху на штифты уголков. За счет этого получается прямоугольная рама. Изнутри в нее можно вставить красные штифты для крепления двигателей.
- Готовую раму нужно присоединить к процессору. У него снизу — посадочные гнезда. Штифтами синего цвета нужно попасть в крайние отверстия.
- Следующий шаг — соединить колесо и мотор. Потребуется колесо, ось длиной 7 отверстий, 3 шайбы (2 желтые, 1 серая), 2 балки (одна — 3х5 отверстий, вторая — маленькая для крепления мотора). Серую шайбу устанавливают на край оси. Ось вставляют в мотор справа. Теперь слева необходимо закрепить колесо между шайбами. Оно нанизывается так, чтобы лицевая сторона была снаружи. Угловой балкой крепят мотор к корпусу. Она вставляется сзади мотора и закрепляется 2-мя синими штифтами. Непосредственно к корпусу процессора мотор крепится оставшейся маленькой деталью.
- Собранные моторы с колесами нужно соединить с процессором. В середину нижней балки мотора вставляется штифт с крестиком. Он должен попасть в балку рамы рядом с красным штифтом, который был вставлен на 1-ом этапе сборки. Колесо должно слегка выходить спереди за балку. Осталось прикрепить мотор сверху. Маленькая балка должна попасть в среднее отверстие верхнего ряда на корпусе процессора.
- Для задней опоры необходим шарик в чашечке. К его верхней части крепятся уголки: 4 одинаковых тонких уголка, в 2 из них вставляются синие штифты. 1-ый закрепляется справа, 2-ой – слева. 2 уголка закреплены на чашке с шариком. В другие 2 уголка вставляются черные штифты. Первый – справа, второй – слева. Теперь нужно добавить 2 балки длиной 5 отверстий. С помощью красных штифтов рама фиксируется на конструкции. Задняя опора готова.
- Для бампера потребуются 2 балки длиной 15 отверстий, в каждой по 2 черных штифта. Балка длиной 5 отверстий надевается сверху на эти штифты и фиксирует 2 балки, превращая их в одну. Чтобы прикрепить балку к корпусу робота, понадобятся 2 серые балки длиной 13 отверстий, в них вставляются черные штифты. Прикрепляются балки друг к другу маленькой деталью длиной 2 отверстия. С 1 стороны – синий штифт с крестиком, с другой – черный.
- Теперь нужно собрать части робота EV3 в единый механизм. Сзади к раме нужно поставить опору, чтобы робот стоял ровно. Бампер крепится черными штифтами сверху за балку на двигателе.
Чем соревнование отличается от стандартного «Кегельринга»
В стандартной игре роботу нужно сбить 8 банок. В «Кегельринг-Квадро» их всего 4: 2 белые и 2 черные. Побеждает тот, кто, не выходя за пределы круга, быстрее всех вытолкнет белые банки. За черные штрафуют.
Участник имеет право выставить робота для Кегельринга шириной 20 см, длиной 20 см.
Написание программы для «Кегельринга»
Робот должен стоять в центре поля напротив банки, далее нужно загрузить программу, USB-кабелем соединить его с компьютером и начать программировать.
На «Странице аппаратных средств» есть раздел «Представление порта», там нужно взять расстояние до банки, которое замерит сенсор. Например, ультразвуковой прибор фиксирует число «25,9».

При ультразвуковом датчике, который входит в образовательный набор:
- Чтобы робот вращался на месте, нужна команда «Независимое управление моторами» (зеленая палитра). Следует выбрать режим «Включить» и поставить мощность 30 для входов «B» и «C».
- Чтобы робот искал кеглю, потребуется программа «Ожидание» (оранжевая палитра). Подойдет режим «Ультразвуковой датчик – Сравнение – Расстояние в сантиметрах». Сигналом для срабатывания датчика будет цифра 35.
- Чтобы робот остановился, используется программа «Независимое управление моторами» (зеленая палитра). Моторы следует остановить.
Программу нужно загрузить в машину и протестировать. Чтобы робот останавливался точно напротив кегли, возможно, придется ее донастроить с помощью команды «Независимое управление моторами». Еще вариант — понемногу наращивать скорость вращения для подбора нужной мощности.
Дальше нужно поставить машину так, чтобы сенсор цвета был прямо над ограничительной линией черного цвета. Измерив показатель в режиме «Яркость отраженного света», устанавливается пороговое значение. Например: 10, если замер дал результат «7».
Чтобы робот ехал по прямой линии, нужно перейти в программный блок «Рулевое управление» (зеленая палитра) и выбрать «Включить». Для команды «Рулевое управление» следует поставить «0», для «Мощности» — «50».
Чтобы сенсор цвета искал черную границу, в программном блоке «Ожидание» (оранжевая палитра) (режим «Датчик цвета – Сравнение – Яркость отраженного сигнала») задаются следующие характеристики: «Тип сравнения» = 4, «Пороговое значение» = 10.
Чтобы робот проезжал черную границу и останавливался, поможет программный блок «Рулевое управление» (зеленая палитра). Двигатели нужно выключить.
Чтобы запрограммировать машину на возвращение в исходную позицию – центр ринга, понадобится совершить 3 действия:
- Перед началом движения показания датчика вращения мотора, подключенного к порту «B», обнуляются.
- После остановки на черной черте определяют расстояние, пройденное мотором «B» в градусах.
- Затем нужно задать это значение в параметр «Градусы» программного блока «Рулевое управление», а «Мощность» задать «-50».
Чтобы робот сбил все кегли, нужно поместить блоки в тело программы «Цикл» (оранжевая палитра). Режим рекомендуется поставить на «Подсчет», параметр «Подсчет» равен количеству кеглей.
Как изменить условие, чтобы робот отличал цвет кегель
Робота с инфракрасным датчиком нужно поставить в центр ринга. Сначала перед ним ставится белая кегля и фиксируются показания датчика — «49».
После замены белой на черную данные принимающего устройства изменятся и составят «64». Чтобы определялись только белые и не замечались черные, подойдет значение между «49» и «64». Например, «55».
Оценка статьи:
![]() Загрузка…
Загрузка…
Введение:
Раздел «Практика» являет собой продолжение курса «Первые шаги». На протяжении ряда уроков мы разберем решение базовых задач робототехники., научимся получать и обрабатывать информацию от нескольких датчиков. Надеемся, что полученные знания помогут вам в дальнейшем при самостоятельном решении творческих и соревновательных задач.
Урок №11 посвятим разбору соревновательной дисциплины под названием «Кегельринг».
11.1 Правила соревнования. Подготовка поля для проведения соревнований.
Основные правила «Кегельринга» довольно просты: необходимо собрать и запрограммировать робота, который выталкивает кегли за пределы ринга. Кеглями, как правило, выступают жестяные банки емкостью 0,33 л, а роль ринга выполняет белое поле, ограниченное черной окружностью с шириной линии 50 мм. С одним из вариантов регламента проведения соревнования можете ознакомиться под спойлером ниже:
Регламент соревнований роботов «Кегельринг» по версии сайта myROBOT.ru
Ссылка на страницу с правилами на сайте myROBOT.ru
1. Условия состязания
- За наиболее короткое время робот, не выходя более чем на 5 секунд за пределы круга, очерчивающего ринг, должен вытолкнуть расположенные в нем кегли.
- На очистку ринга от кеглей дается максимум 2 минуты.
- Если робот полностью выйдет за линию круга более чем на 5 секунд, попытка не засчитывается.
- Во время проведения состязания участники команд не должны касаться роботов, кеглей или ринга.

2. Ринг
- Цвет ринга — светлый.
- Цвет ограничительной линии — черный.
- Диаметр ринга — 1 м (белый круг).
- Ширина ограничительной линии — 50 мм.
3. Кегли
- Кегли представляют собой жестяные цилиндры и изготовлены из пустых стандартных жестяных банок (330 мл), использующихся для напитков.
- Диаметр кегли — 70 мм.
- Высота кегли — 120 мм.
- Вес кегли — не более 50 гр.
- Цвет кегли — белый.
4. Робот
- Максимальная ширина робота 20 см, длина — 20 см.
- Высота и вес робота не ограничены.
- Робот должен быть автономным.
- Во время соревнования размеры робота должны оставаться неизменными и не должны выходить за пределы 20 х 20 см.
- Робот не должен иметь никаких приспособлений для выталкивания кеглей (механических, пневматических, вибрационных, акустических и др.).
- Робот должен выталкивать кегли исключительно своим корпусом.
- Запрещено использование каких-либо клейких приспособлений на корпусе робота для сбора кеглей.
5. Игра
- Робот помещается строго в центр ринга.
- На ринге устанавливается 8 кеглей.
- Кегли равномерно расставляются внутри окружности ринга. На каждую четверть круга должно приходиться не более 2-х кеглей. Кегли ставятся не ближе 12 см. и не далее 15 см. от черной ограничительной линии. Перед началом игры участник состязания может поправить расположение кеглей. Окончательная расстановка кеглей принимается судьей соревнования.
- Цель робота состоит в том, чтобы вытолкнуть кегли за пределы круга, ограниченного линией.
- Кегля считается вытолкнутой, если никакая ее часть не находится внутри белого круга, ограниченного линией.
- Один раз покинувшая пределы ринга кегля считается вытолкнутой и может быть снята с ринга в случае обратного закатывания.
- Робот должен быть включен или инициализирован вручную в начале состязания по команде судьи, после чего в его работу нельзя вмешиваться. Запрещено дистанционное управление или подача роботу любых команд.
6. Правила отбора победителя
- Каждой команде дается не менее двух попыток (точное число определяется судейской коллегией в день проведения соревнований).
- В зачет принимается лучшее время из попыток или максимальное число вытолкнутых кеглей за отведенное время.
- Победителем объявляется команда, чей робот затратил на очистку ринга от кеглей наименьшее время, или, если ни одна команда не справилась с полной очисткой ринга, команда, чей робот вытолкнул за пределы ринга наибольшее количество кеглей.
Итак: для проведения соревнования нам понадобится поле, точно такое же, которое мы использовали при решении Задачи №12 Урока №6 курса «Первые шаги». Вы можете скачать макет подходящего поля на странице «Макеты полей для тренировки и соревнований» нашего сайта, а затем распечатать его в цифровой типографии на баннерной ткани, либо изготовить поле самостоятельно, используя плакатную бумагу подходящего размера, большой циркуль, линейку и черную тушь.
Жестяные банки лучше всего обклеить по периметру самоклеящейся бумагой (нам понадобятся 2 — 4 банки белого цвета и столько же — черного).
Реквизит для урока готов!
11.2 Конструирование робота для конкретного вида соревнования.
На первоначальном этапе решения задачи давайте сделаем пару маленьких допущений: не будем обращать внимание на удовлетворение требования к размерам нашего робота, ограничимся поиском и выталкиванием всего одной кегли.
Наступает важный этап моделирования робота — перед нами стоят две взаимосвязанных задачи:
- Разработка ключевого алгоритма поведения нашего робота;
- Разработка механической конструкции робота, позволяющей реализовать требуемое поведение.
Рассмотрим следующую поведенческую модель:
- Робот, находясь в центре поля, начинает вращаться по часовой стрелке, пока не заметит кеглю.

- Двигаясь в направлении кегли, робот выталкивает её за пределы окружности.
- Заметив черную границу поля, робот возвращается назад, в место старта.



Следовательно, наш робот должен:
- уметь вращаться на месте вокруг своей оси;
- уметь двигаться прямолинейно;
- уметь обнаруживать предмет, удаленный на некоторое расстояние;
- уметь обнаруживать границу поля.
Данные требования диктуют нам условия конструкции робота:
- для реализации первых двух условий применим уже известную нам подвижную платформу, использующую два больших мотора и вращающуюся опору (робот-тележка);
- для обнаружения кегли воспользуемся одним из имеющихся в наличии датчиков: инфракрасным или ультразвуковым;
- границу поля нам поможет обнаружить датчик цвета.
Всем условиям в полной мере отвечает наш робот, которым мы пользовались, когда проходили курс «Первые шаги».
Lego mindstorms EV3 Home

Lego mindstorms EV3 Education

Вы можете воспользоваться предложенной инструкцией или собрать собственного робота, отвечающего определенным нами требованиям к его конструкции. В процессе сборки конструкции не забудьте подключить моторы и датчики к модулю EV3: левый мотор — к порту «B», правый мотор — к порту «C», ультразвуковой или инфракрасный датчик — к порту «2», датчик цвета — к порту «3».
После сборки робота приступим к созданию программы.
11.3 Создание программы для соревнования «Кегельринг».
Подробно пропишем последовательность действий нашего робота для обнаружения одной кегли на поле:
- вращаться вокруг своей оси по часовой стрелке, пока впереди расположенный датчик не обнаружит кеглю;
- остановиться напротив кегли;
- двигаться вперед, пока датчик цвета не обнаружит черную границу поля;
- остановиться;
- двигаться назад в центр поля.
Приступим к реализации и отладке п. 1, 2 — научим нашего робота обнаруживать кеглю и останавливаться точно напротив. Сначала нам необходимо выбрать пороговое значение для обнаружения кегли напротив нашего робота. Для этого загрузим среду программирования, создадим новый проект — «lessons-2», новую программу в проекте назовем «lesson-11». Подключим робота к среде программирования, затем установим его точно в центр поля, поставим напротив робота кеглю.
На «Странице аппаратных средств», находящейся в правом нижнем углу среды программирования, выберем вкладку «Представление порта» (Рис. 1, 2 поз. 1) и снимем показание датчика, определяющего расстояние до кегли, установив соответствующий режим отображения показаний.
В нашем случае ультразвуковой датчик в режиме «Расстояние в сантиметрах» показывает значение — 25,9 (Рис. 1 поз. 2).

Рис. 1
Инфракрасный датчик в режиме «Приближение» показывает значение — 48 (Рис. 2 поз. 2)

Рис. 2
Как определить показания датчика, используя дисплей модуля EV3
Если Вы используете подключение модуля EV3 к среде программирования с помощью USB-кабеля (подробно о способах подключения), то сможете наблюдать показания датчиков на «Странице аппаратных средств» только на максимальном удалении робота от компьютера, равном длине USB-кабеля. В этом случае показания датчика можно посмотреть непосредственно на экране модуля EV3. Управляя кнопками модуля EV3, перейдите в меню (Рис. 3 поз. 1), выберите пункт «Port View» и нажмите центральную кнопку (Рис. 3 поз. 2).
 Рис. 3
Рис. 3
Верхний ряд блоков отображает показания моторов, подключенных к модулю EV3 (Рис. 4 поз. 1).
Нижний ряд блоков отображает показания датчиков, подключенных к модулю EV3. Управляя клавишами модуля EV3 можно перемещаться между показаниями для получения подробной информации о датчике и выводимом значении (Рис. 4 поз. 2).

Рис. 4
Теперь мы можем запрограммировать нахождение роботом кегли:
Ультразвуковой датчик
- Для того, чтобы заставить робота вращаться вокруг своей оси, воспользуемся программным блоком «Независимое управление моторами» «Зеленой палитры», Режим работы блока установим «Включить», значение мощности для порта «B» установим равным 30, значение мощности для порта «C» установим равным —30 (Рис. 5 поз.1),
- Для поиска кегли используем программный блок «Ожидание» «Оранжевой палитры» в режиме «Ультразвуковой датчик — Сравнение — Расстояние в сантиметрах». Для гарантированного нахождения увеличим пороговое значение срабатывания датчика до 35 (Рис. 5 поз. 2)
- После того, как робот окажется напротив кегли, используя программный блок «Независимое управление моторами» «Зеленой палитры» выключим моторы (Рис. 5 поз. 3).

Рис. 5
Инфракрасный датчик
- Для того, чтобы заставить робота вращаться вокруг своей оси, воспользуемся программным блоком «Независимое управление моторами» «Зеленой палитры», Режим работы блока установим «Включить», значение мощности для порта «B» установим равным 30, значение мощности для порта «C» установим равным —30 (Рис. 6 поз.1),
- Для поиска кегли воспользуемся программным блоком «Ожидание» «Оранжевой палитры» в режиме «Инфракрасный датчик — Сравнение — Приближение». Для гарантированного нахождения увеличим пороговое значение срабатывания датчика до 55 (Рис. 6 поз. 2)
- После того, как робот окажется напротив кегли, используя программный блок «Независимое управление моторами» «Зеленой палитры» выключим моторы (Рис. 6 поз. 3).

Рис. 6
Загрузим получившуюся программу в робота и запустим её на выполнение. Раз за разом, выполняя программу, мы можем заметить, что наш робот останавливается не совсем точно напротив банки. Связано это с тем, что датчик может обнаруживать предмет не только строго напротив себя, а и на некотором отклонении от направления взгляда датчика. В этом случае можно, либо после остановки робота немного довернуть его на необходимый угол, используя дополнительный блок «Независимое управление моторами», либо постепенно увеличивать скорость вращения, подбирая параметр мощность (Рис. 5, 6 поз. 1), пока робот не станет останавливаться точно напротив кегли. Например, нам потребовалось увеличить мощность до 50 единиц для робота, собранного из образовательной версии набора, и до 40 единиц для робота, собранного из домашней версии набора.
Переходим к реализации п. 3, 4 нашей последовательности действий.
Двигаться вперед и останавливаться при пересечении черной линии мы уже научились, когда разбирали Задачу №11 Урока №6 курса «Первые шаги». Установим робота таким образом, чтобы датчик цвета находился точно над черной границей поля и измерим его значение в режиме «Яркость отраженного света» любым удобным вам способом, рассмотренным выше. В нашем случае получилось значение, равное 7. В качестве порогового значение примем число 10.
Добавим к нашей программе обнаружения кегли следующие программные блоки:
- Для того, чтобы заставить робота двигаться прямолинейно, воспользуемся программным блоком «Рулевое управление» «Зеленой палитры». Режим работы блока установим «Включить», параметр «Рулевое управление » = 0, параметр «Мощность» = 50. (Рис. 7 поз. 1)
- Для поиска датчиком цвета черной границы воспользуемся программным блоком «Ожидание» «Оранжевой палитры» в режиме «Датчик цвета — Сравнение — Яркость отраженного сигнала», параметр «Тип сравнения» = 4, параметр «Пороговое значение» = 10. (Рис. 7 поз. 2)
- После того, как робот пересечет черную линию, используя программный блок «Рулевое управление»«Зеленой палитры» выключим моторы (Рис. 7 поз. 3).

Рис. 7
Наш робот научился успешно находить и выталкивать кеглю, но текущая конструкция не позволяет роботу уверено её фиксировать при транспортировке за пределы поля. Давайте немного доработаем конструкцию робота, прикрепив к нему клешни, которые увеличат ширину захвата и позволят прочно удерживать кеглю. На переднем бампере робота слева и справа закрепите детали, как показано на рисунках ниже:
Lego mindstorms EV3 Home

Lego mindstorms EV3 Education

Теперь наш робот просто отлично справляется со своей работой! Осталось только научить его возвращаться в центр круга…
«Страница аппаратных средств» среды программирования позволяет нам наблюдать не только текущие показания датчиков, но и накопленные показания датчика вращения мотора (Рис. 8 поз. 1). Нажав, на значок мотора, мы можем установить предпочтительный нам вывод информации о вращении мотора в «Оборотах» или «Градусах» (Рис. 8 поз. 2).

Рис. 8
Программный блок «Вращение мотора» «Желтой палитры» позволяет получать и обрабатывать это значение в программе. Режим «Сброс» программного блока «Вращение мотора» устанавливает нулевое значение датчика и отсчет оборотов начинается сначала. (Рис. 9)

Рис. 9
Воспользуемся этой возможностью: если мы сбросим показание одного из датчиков моторов в 0 (в данном случае можно обнулить значение любого из моторов «B» и «C», ведь робот поедет прямо, а значит оба колеса провернутся на одинаковое значение), то после остановки робота над черной линией, можно будет получить значение датчика в «Градусах» или «Оборотах» и, подав его на вход соответствующего параметра блока «Рулевое управление», заставить робота проехать точно такое же расстояние. А для того, чтобы робот двигался назад, необходимо изменить значение параметра «Мощность» на отрицательное значение.
Внесем необходимые изменения в нашу программу:
- Перед началом движения вперед сбросим в 0 показания датчика вращения мотора, подключенного к порту «B» (Рис. 10 поз. 1).
- После остановки на черной границе поля считаем расстояние, пройденное мотором «B» в градусах (Рис. 10 поз. 1).
- Полученное значение подадим в параметр «Градусы» программного блока «Рулевое управление», значение параметра «Мощность» = -50 (Рис. 10 поз. 1)!
")
Рис. 10
Загрузим получившуюся программу в робота и убедимся, что робот нашел кеглю, вытолкал её за пределы поля и вернулся в центр поля!
Для того, чтобы заставить нашего робота выталкивать требуемое количество кеглей, все наши программные блоки поместим внутрь программного блока «Цикл» «Оранжевой палитры». Режим программного блока «Цикл» установим в значение «Подсчет», параметр «Подсчет» установим равным количеству кеглей (Рис. 11, 12 поз. 1) Для удобства отображения на экране нам пришлось оформить программу в две строки — вы же вполне можете сложить её в одну строку.

Рис. 11

Рис. 12
Программа готова!
11.4 Соревнование «Кегельринг» с дополнительм условием
На сайте myROBOT.ru опубликованы еще два регламента проведения соревнования «Кегельринг»: «Кегельринг-КВАДРО» и «Кегельринг-МАКРО». Основное условие — необходимо выталкивать за пределы поля белые кегли, оставляя на месте черные.
Как научить робота на расстоянии определять цвет кегли? Можно впереди, по ходу движения робота расположить еще один датчик цвета и, приблизившись к кегле на расстояние 1 — 2 см, определить её цвет, теряя при этом драгоценное время, отведенное на выполнение задания. Но, если вы внимательно изучили п. 8.2 Урока №8 курса «Первые шаги», то уже знаете, что на показания инфракрасного датчика в режиме «Приближение» влияет также цвет предмета. Проведем эксперимент: установим робота с инфракрасным датчиком в центр поля, напротив поместим белую кеглю и зафиксируем показания датчика. В нашем случае это значение равно 49. Теперь напротив робота установим черную кеглю — показание датчика изменилось и теперь, не смотря на одинаковое расстояние, составляет 64. Следовательно, для успешного обнаружения белых кеглей и игнорирования черных, необходимо выбрать в качестве порогового — значение, находящееся между этими числами. Число 55 полностью удовлетворяет этому условию. Нам даже не придется переделывать основной алгоритм программы! Попробуйте и убедитесь в этом сами!
К сожалению, решить данную задачу с использованием только ультразвукового датчика, не представляется возможным…
Заключение:
При решении практической задачи робототехники успех приходит только при многократном тестировании робота. В процессе тестирования возможно возникновение ситуации, когда вам потребуется вносить изменения не только в программу, но и конструкцию робота. Не бойтесь экспериментировать, не бойтесь ошибаться. Вдумчивый анализ ошибок обязательно принесет вам положительный результат! Удачи!
Видеосборка робота для кегельринга по этапам
-
Создано: 24 10 15
-
4469
Всем юным робототехникам и заинтересованным родителям!
Отсняли процесс сборки робота для Кегельринга отдельно, по «кусочкам». Можно смотреть и повторять
Этап первый: cобираем раму для крепления двигателей:
Этап второй: закрепляем раму на процессоре:
Этап третий: снабжаем двигатели колесами:
Этап четвертый: закрепляем двигатели на раме:
Этап пятый: собираем задний упор:
Этап шестой: собираем бампер:
Этап седьмой и последний: прикрепляем задний упор и бампер:
Кегельринг
- За наиболее короткое время робот, не выходя более чем на 5 секунд за пределы круга, очерчивающего ринг, должен вытолкнуть расположенные в нем кегли.
- На очистку ринга от кеглей дается максимум 2 минуты.
- Если робот полностью выйдет за линию круга более чем на 5 секунд, попытка не засчитывается.
- Во время проведения состязания участники команд не должны касаться роботов, кеглей или ринга.
РИНГ
- Цвет ринга — светлый.
- Цвет ограничительной линии — черный.
- Диаметр ринга — 1 м (белый круг).
- Ширина ограничительной линии — 50 мм.
Кегли
- Кегли представляют собой жестяные цилиндры и изготовлены из пустых стандартных жестяных банок (330 мл), использующихся для напитков.
- Диаметр кегли — 70 мм.
- Высота кегли — 120 мм.
- Вес кегли — не более 50 гр.
- Цвет кегли — белый.
Робот
- Максимальная ширина робота 20 см, длина — 20 см.
- Высота и вес робота не ограничены.
- Робот должен быть автономным.
- Во время соревнования размеры робота должны оставаться неизменными и не должны выходить за пределы 20 х 20 см.
- Робот не должен иметь никаких приспособлений для выталкивания кеглей (механических, пневматических, вибрационных, акустических и др.).
- Робот должен выталкивать кегли исключительно своим корпусом.
- Запрещено использование каких-либо клейких приспособлений на корпусе робота для сбора кеглей
Маневренность
- Робот помещается строго в центр ринга.
- На ринге устанавливается 8 кеглей.
- Кегли равномерно расставляются внутри окружности ринга. На каждую четверть круга должно приходиться не более 2-х кеглей. Кегли ставятся не ближе 12 см. и не далее 15 см. от черной ограничительной линии. Перед началом игры участник состязания может поправить расположение кеглей. Окончательная расстановка кеглей принимается судьей соревнования.
- Цель робота состоит в том, чтобы вытолкнуть кегли за пределы круга, ограниченного линией.
- Кегля считается вытолкнутой, если никакая ее часть не находится внутри белого круга, ограниченного линией.
- Один раз покинувшая пределы ринга кегля считается вытолкнутой и может быть снята с ринга в случае обратного закатывания.
- Робот должен быть включен или инициализирован вручную в начале состязания по команде судьи, после чего в его работу нельзя вмешиваться. Запрещено дистанционное управление или подача роботу любых команд.
Правила отбора победителя
- Каждой команде дается не менее двух попыток (точное число определяется судейской коллегией в день проведения соревнований).
- В зачет принимается лучшее время из попыток или максимальное число вытолкнутых кеглей за отведенное время.
- Победителем объявляется команда, чей робот затратил на очистку ринга от кеглей наименьшее время, или, если ни одна команда не справилась с полной очисткой ринга, команда, чей робот вытолкнул за пределы ринга наибольшее количество кеглей.
1. Робот, находясь в центре поля, начинает вращаться по часовой стрелке, пока не заметит кеглю.
2. Двигаясь в направлении кегли, робот выталкивает её за пределы окружности.
3.Заметив черную границу поля, робот возвращается назад, в место старта
Следовательно, наш робот должен:
- уметь вращаться на месте вокруг своей оси;
- уметь двигаться прямолинейно;
- уметь обнаруживать предмет, удаленный на некоторое расстояние;
- уметь обнаруживать границу поля.
Данные требования диктуют нам условия конструкции робота:
- для реализации первых двух условий применим уже известную нам подвижную платформу, использующую два больших мотора и вращающуюся опору (робот-тележка);
- для обнаружения кегли воспользуемся одним из имеющихся в наличии датчиков: инфракрасным или ультразвуковым;
- границу поля нам поможет обнаружить датчик цвета.
Вы можете воспользоваться предложенной инструкцией или собрать собственного робота, отвечающего определенным нами требованиям к его конструкции. В процессе сборки конструкции не забудьте подключить моторы и датчики к модулю EV3: левый мотор — к порту «B», правый мотор — к порту «C», ультразвуковой или инфракрасный датчик — к порту «2», датчик цвета — к порту «3».
Подробно пропишем последовательность действий нашего робота для обнаружения одной кегли на поле:
- вращаться вокруг своей оси по часовой стрелке, пока впереди расположенный датчик не обнаружит кеглю;
- остановиться напротив кегли;
- двигаться вперед, пока датчик цвета не обнаружит черную границу поля;
- остановиться;
- двигаться назад в центр поля.
- Для того, чтобы заставить робота вращаться вокруг своей оси,
- Поиск кегли используем программный блок «Ультразвуковой датчик — Сравнение — Расстояние в сантиметрах». Для гарантированного нахождения увеличим пороговое значение срабатывания датчика до 35
- После того, как робот окажется напротив кегли, используя программный блок «Выключить мотор».
Добавим к нашей программе обнаружения кегли следующие программные блоки:
- Для того, чтобы заставить робота двигаться прямолинейно, воспользуемся программным блоком «Рулевое управление».
- Для поиска датчиком цвета черной границы воспользуемся программным блоком «Датчик цвета — Сравнение — Яркость отраженного сигнала», параметр «Тип сравнения» = 4, параметр «Пороговое значение» = 10.
- После того, как робот пересечет черную линию, используя программный блок «Выключить мотор».
Внесем необходимые изменения в нашу программу для возврата робота в центр поля:
- Перед началом движения вперед сбросим в 0 показания датчика вращения мотора, подключенного к порту «B»
- После остановки на черной границе поля считаем расстояние, пройденное мотором «B» в градусах.
- Полученное значение подадим в параметр «Градусы» программного блока «Рулевое управление», значение параметра «Мощность» = -50.
Для того, чтобы заставить нашего робота выталкивать требуемое количество кеглей, все наши программные блоки поместим внутрь программного блока «Цикл»
Режим программного блока «Цикл» установим в значение «Подсчет», параметр «Подсчет» установим равным количеству кеглей.
- Название модели: Кегельринг
- Возраст 8 — 14 лет
- Набор: Lego Mindstorms EV3
В данном методическом пособии представлена пошаговая инструкция по сборке модели Кегельринга. Модель собирается из конструктора Lego Mindstorms EV3. Данный робот является учебной моделью для подготовки к Кегельрингу.
Содержание
- Соревнования «Кегельринг роботов»
- Регламент соревнований «Кегельринг роботов» для Lego EV3
- Требования к роботу
- Требования к полигону
- Требования к кеглям
- Условия проведения состязаний
- Правила игры
- Программа для кегельринга
- Как написать программу «Кегельринг роботов Lego EV3»
Соревнования «Кегельринг роботов»
Кегельринг роботов является популярной категорией соревнований особенно у начинающих робототехников. Они вызывают огромный интерес и много эмоций у участников.

В соревнованиях «Кегельринг» автономный роботу нужно вытолкнуть жестяные банки за минимальное время за пределы поля.
Как правило кегельринг проводится для младшей категории детей от 10 до 12 лет. Для того, чтобы конкуренция была одинаковой идет еще и разделение по самым распространенным робототехническим наборам. То есть отдельно проводятся соревнования, например, по кегельрингу для роботов Lego EV3 и отдельно для роботов, собранных на базе контроллера Arduino.
В этой статье я расскажу о том, как написать программу для кегельринга роботов на основе робототехнического набора Lego Mindstorms EV3. Прежде чем приступить к написанию управляющей программы нужно внимательно изучить условия проведения соревнований.
Кегельринг роботов проводится практически во всех областях России и условия проведения соревнований могут немного отличаться друг от друга. В качестве примера приведу один из регламентов проведения состязаний.
Требования к роботу
Робот может быть собран только из деталей и датчиков робототехнического набора Lego и включать в себя любое число контроллеров Lego. Ширина и длина робота не более 25 сантиметров. По высоте робот не ограничен. Робота не должен весить более одного килограмма. Удаленное управление роботом недопустимо, робот должен быть автономным.

Выталкивание кеглей должно производиться только корпусом робота без использования любых приспособлений таких как акустические, пневматические, вибрационные и т.д. Клейкие устройства для собирания кеглей, закрепленные на корпусе робота запрещены.
Требования к полигону
Полигон является рингом белого цвета с диаметром 1 метр, ограничительная линия черного цвета шириной 5 сантиметров.

Требования к кеглям
Кегли являются пустыми жестяными банками 330 миллилитров, диаметром 70 миллиметров и весом не более 50 грамм. Кегли должны быть белого цвета. Их можно окрашивать или обтягивать ватманом.
Условия проведения состязаний
Перед началом соревнований на полигоне размещают от 6 до 8 кеглей. Робот располагается в центре полигона. За время поединка робот должен вытолкнуть максимальное количество кеглей и не выйти за пределы ринга. Когда робот вытолкнул все кегли за ограничительную линию ринга, поединок останавливается и время фиксируется.
Попытка не будет засчитана если робот не сможет вытолкнуть все кегли. Выигравшим считается робот, который вытолкнул все кегли за минимальное время. На очистку полигона от кеглей дается 2 минуты. Во время проведения соревнований игроки не должны касаться роботов, кеглей или ринга.
Правила игры
Робот устанавливается точно в центре площадки. Кегли располагают внутри окружности ринга равномерно расставляют. Количество кеглей от шести до восьми и их ставят не ближе 5 сантиметров от черной ограничивающей линии. Устанавливает робота и расставляет кегли судья соревнований.
После того как кегли расставлены по команде судьи участник состязания включает своего робота. Затем в работу робота нельзя вмешиваться. На выполнение попытки дается не более 2-х минут. Если робот вытолкнул все кегли, то соревнование останавливается и фиксируется время.

По команде судьи «Марш» один из членов команды нажимает кнопку «Пуск» робота. Робот ждет пять секунд и начинает выталкивать кегли. Участники отходят от края поля на 1 метр для того, чтобы не создавать помехи датчикам робота.
Робот, выполнивший попытку за минимальное время, становится победителем. Если робот за назначенное время не смог выбить все кегли, то данная попытка не идет в зачет. Всего разрешено две попытки. Из двух попыток берется минимальное время.
Если кегля никакая частью не располагается внутри черного ограничивающего круга, то она считается вытолкнутой. Когда кегля покинула ринг один раз, ее считают вытолкнутой и кеглю разрешается снять с полигона если она закатится обратно. Дистанционное управление роботом или подача любых команд запрещены и ведут к дисквалификации команды.
Программа для кегельринга
Изучив регламент состязаний можно приступать к написанию программы. Установим на робота три датчика: датчик касания, ультразвуковой датчик и датчик цвет. Также нам необходимы два больших мотора. Левый мотор соединяем с портом B, правый с портом C.
Датчик касания нужен для запуска программы устанавливаем в первый порт. Ультразвуковой датчик необходим для определения месторасположения кегли устанавливаем во второй порт. Датчик цвета, который определяет черную линию и не дает роботу покинуть пределы ринга соединяем с третьим портом.

Создаем новый проект и сохраняем его «Kegelring». Название проекта нужно набирать латинским шрифтом. Для запуска программы ставим блок ожидания с датчик касания для запуска программы на щелчок. После этого ставим блок ожидания таймер. Значение времени устанавливаем в 5 секунд. То есть после нажатия датчика касания робот ждет 5 секунд и после этого можно писать программу на выталкивание кеглей.

Основная программа будет состоять из бесконечного цикла внутри которого будут размещаться еще два цикла и другие блоки программирования. В первом цикле помещаю блок рулевого управления, настроенный на поворот на месте. Робот поворачивается на месте до тех пор, пока не увидит кеглю.
Скорость поворота определяется так, чтобы у робота не было большой инерции. Для начала установим мощность 30 единиц, затем подстроим перед соревнованиями на ринге при испытании роботов. После этого программа выходит из цикла и ставим блок остановки моторов.

Так как радиус ринга 50 сантиметров, кегли располагаются приблизительно в 5 сантиметрах от черной ограничивающей линии, сама кегля имеет диаметр 7 сантиметров, и сам робот имеет размеры не более 25 сантиметров, то расстояние, на котором ультразвуковой датчик может увидеть кеглю определю в 35 сантиметров. Расстояние нужно также отрегулировать на полигоне опытным путем.
В следующем цикле также ставим блок рулевого управления на движение вперед со скоростью 50. Скорость нужно подбирать для каждого робота индивидуально. В этом цикле робот едет вперед до тех пор, пока не увидит черную линию. При этом за пределы круга выталкивается кегля. Затем также выходим из цикла и останавливаем моторы.

Теперь роботу необходимо вернуться в центр полигона. Так как радиус ринга 50 сантиметров, то ставим блок рулевое управление со скорость минус 50 условных единиц приблизительно на два оборота. Робот едет назад в центр ринга, но количество оборотов также надо подстроить на практике для каждого диаметра колес индивидуально.
Затем цикл повторяется, и робот продолжает искать и выталкивать кегли. Цикл в этом случае бесконечный. Если нужно, то можно задать ограниченное количество циклов. Это только один из вариантов программы.

Можно написать и другие, более совершенные варианты программы «Кегельринг роботов». Все параметры циклов, мощности поворотов и другие нужно подстраивать исходя из конструкции вашего робота и условий проведения соревнований.