Предложите, как улучшить StudyLib
(Для жалоб на нарушения авторских прав, используйте
другую форму
)
Ваш е-мэйл
Заполните, если хотите получить ответ
Оцените наш проект
1
2
3
4
5
Опубликовано на Яндекс.Дзен
ЯЛБИ.421413.002 РЭ
Контроллер исполнительного механизма КИМ1 защищен патентом.
В Н И М А Н И Е! До изучения руководства по эксплуатации изделие не включать!
Надежность и долговечность контроллера исполнительного механизма КИМ1 обеспечиваются не только качеством изделия, но и правильным соблюдением режимов и условий эксплуатации, поэтому соблюдение всех требований, изложенных в настоящем руководстве по эксплуатации, является обязательным.
В связи с систематически проводимыми работами по совершенствованию конструкции и технологии изготовления возможны небольшие расхождения между руководством по эксплуатации и поставляемым изделием, не влияющие на технические характеристики изделия, на условия его монтажа и эксплуатации.
Содержание
Введение
1 Описание и работа контроллера
1.1 Назначение контроллера
1.2 Технические характеристики
1.3 Состав контроллера
1.4 Устройство и выполняемые функции
Настоящее руководство по эксплуатации (далее – РЭ) предназначено для ознакомления потребителя с контроллером исполнительного механизма КИМ1 (далее – контроллер) с целью обеспечения полного использования его технических возможностей при эксплуатации.
РЭ содержит технические характеристики, описание состава, устройства и функциональных возможностей контроллера, а также сведения по эксплуатации, транспортированию и хранению.
При эксплуатации контроллера необходимо соблюдать требования безопасности* для электроустановок напряжением до1000 V.
К работе с контроллером допускаются лица, изучившие его работу по эксплуатационной документации, прошедшие инструктаж на рабочем месте и имеющие допуск к эксплуатации электроустановок напряжением до1000 V.
При нарушении правил эксплуатации и требований эксплуатационной документации контроллер может представлять опасность для жизни и здоровья человека наличием повышенного значения напряжения в электрических цепях, замыкание которых может произойти через человека.
Руководство по эксплуатации распространяется на типы контроллеров, указанных в таблицах 1, 2 и 3.
Перечень документов, на которые даны ссылки в настоящем РЭ, приведен в приложении А.
Перечень принятых сокращений:
АВАР – авария;
БЦП – плата процессора;
ВП – внешний пускатель;
ДП – датчик положения;
ДТ – датчик температуры двигателя;
ЗАКР – закрыто (закрыть);
ИК – инфракрасный канал;
КИМ – контроллер исполнительного механизма;
КВ – концевой выключатель;
КВЗ – концевой выключатель закрытия;
КВО – концевой выключатель открытия;
МВ – моментный выключатель;
МВЗ – моментный выключатель закрытия;
МВО – моментный выключатель открытия;
МОМ. – момент;
МЭО(Ф) – механизм электрический однооборотный (фланцевый) ;
ОТКР – открыто (открыть);
ПВ – путевой выключатель;
ПВЗ – путевой выключатель закрытия;
ПВО – путевой выключатель открытия;
ПИТ – питание;
ПМУ – пульт местного управления;
ПН-2 – пульт настройки;
ПЭМ – привод электрический многооборотный;
СК – плата силового коммутатора (плата СК);
УАВ – узел аналогового ввода;
УЗТ – узел защиты по току;
УСП – узел сигнализации положения;
УСПС – узел сигнализации положения сетевой;
УСС – узел сопряжения с сетью;
ЭП – электропривод;
MODBUS RTU – протокол обмена;
RESET – сброс, перезапуск процессора;
RS-485 – управляющий интерфейс.
* При внутренних поставках в соответствии с действующими «Правилами устройства электроустановок», «Правилами технической эксплуатации электроустановок потребителей» и «Межотраслевыми правилами по охране труда (правил безопасности) при эксплуатации электроустановок». При поставках на экспорт в соответствии с нормативными документами страны, куда поставляется контроллер.
1 Описание и работа контроллера
1.1 Назначение контроллера
1.1.1 Полное наименование — «Контроллер исполнительного механизма КИМ1».
В зависимости от напряжения питания и назначения контроллеры имеют исполнения, указанные в таблицах 1, 2, 3.
Таблица 1 – Исполнения контроллеров для групп механизмов МЭО(Ф)-16, 40
|
Исполнение контроллера |
Опция |
|
КИМ1-1-С-380 |
Сетевое управление |
|
КИМ1-1-С-220 |
|
|
КИМ1-1-А-380 |
Аналоговое управление |
|
КИМ1-1-А-220 |
|
|
КИМ1-1-Д-380 |
Дискретное управление |
|
КИМ1-1-Д-220 |
|
|
КИМ1-1-Т-380 |
Сетевое управление, состояние КВО, КВЗ, |
|
КИМ1-1-Т-220 |
аналоговый выходной сигнал положения |
Таблица 2 – Исполнения контроллеров для групп механизмов МЭО(Ф)-250, 630, 1600, 4000, 10000; ПЭМ-В
|
Исполнение контроллера |
Опция |
|
КИМ1-2-С-380 |
Сетевое управление |
|
КИМ1-2-С-220* |
|
|
КИМ1-2-А-380 |
Аналоговое управление |
|
КИМ1-2-А-220* |
|
|
КИМ1-2-Д-380 |
Дискретное управление |
|
КИМ1-2-Д-220* |
|
|
КИМ1-2-Т-380 |
Сетевое управление, состояние КВО, КВЗ, аналоговый выходной сигнал положения |
|
КИМ1-2-Т-220* |
* Данные исполнения для МЭО(Ф)-250 нереализуемы.
Таблица 3 – Исполнения контроллеров для групп приводов ПЭМ-А (Б); МЭП
|
Исполнение контроллера |
Опция |
|
КИМ1-3-С-380 |
Сетевое управление |
|
КИМ1-3-А-380 |
Аналоговое управление |
|
КИМ1-3-Д-380 |
Дискретное управление |
|
КИМ1-3-Т-380 |
Сетевое управление, состояние КВО, КВЗ, аналоговый выходной сигнал положения |
Обозначение контроллеров при заказе:
*Данный параметр для внутризаводских целей, при заказе не выбирается.
ДЛЯ НАСТРОЙКИ КОНТРОЛЛЕРА ИСПОЛЬЗУЕТСЯ СОЕДИНЕНИЕ ГИБКОЕ СГ9 (СВЯЗЬ С КОМПЬТЕРОМ) ИЛИ ПУЛЬТ НАСТРОЙКИ ПН-2 – 1 ШТ. НА ПАРТИЮ КОНТРОЛЛЕРОВ. ЗАКАЗЫВАЮТСЯ ЗА ОТДЕЛЬНУЮ ПЛАТУ.
Примеры обозначения контроллеров при заказе:
- КИМ1-1-Д-220 – контроллер исполнительного механизма КИМ1 для МЭОФ-40 с опцией Д и напряжением питания 220 V;
- КИМ1-3-Т-380 – контроллер исполнительного механизма КИМ1 для ПЭМ-А с опцией Т и напряжением питания 380 V;
- КИМ1-2-А-380 – контроллер исполнительного механизма КИМ1 для МЭО-250 с опцией А и напряжением питания 380 V.
1.1.2 Контроллер предназначен для работы в составе электрических исполнительных механизмов и электроприводов (далее – ЭП) постоянной скорости для автоматизации объектов в различных отраслях — энергетике, металлургии, жилищно-коммунальном хозяйстве и т.д. Контроллер поставляется, установленным в ЭП или отдельно без ЭП (отдельная поставка).
1.1.3 По способу защиты человека от поражения электрическим током контроллер соответствует классу защиты 01 по ГОСТ 12.2.007.0.
Таблица 4
|
Сигналы |
Опции |
||||
|
А |
Д |
С |
Т |
||
|
Входные |
Дискретные сигналы местного управления «ОТКРЫТЬ», «ЗАКРЫТЬ», «СТОП», «АВАРИЯ» |
+ |
+ |
+ |
+ |
|
Аналоговые сигналы задания положения выходного органа ЭП согласно 1.2.7.3* |
+ |
— |
— |
— |
|
|
Выходные |
Дискретные сигналы «ГОТОВНОСТЬ», «НЕИСПРАВНОСТЬ», «МЕСТНОЕ УПРАВЛЕНИЕ» |
+ |
+ |
+ |
+ |
|
Состояние КВО, КВЗ, ПВО, ПВЗ, МВО**, МВЗ** переключением контактов реле |
+ |
+ |
— |
— |
|
|
Состояние КВО, КВЗ переключением контактов реле |
— |
— |
— |
+ |
|
|
Аналоговые сигналы положения выходного органа ЭП согласно 1.2.7.4* |
+ |
+ |
— |
+ |
|
|
Интерфейс RS-485 для управления и контроля состояния контроллера |
— |
— |
+ |
+ |
|
|
* Диапазоны входных и выходных аналоговых сигналов настраиваются программно. По умолчанию диапазон входного и выходного сигналов — (4-20) мА. ** Отсутствуют в контроллерах КИМ1-1. П р и м е ч а н и е — Знак «+» означает наличие сигнала у контроллера с данной опцией, знак «-» — отсутствие. |
1.1.4 Номинальные значения климатических факторов – согласно ГОСТ15150 для климатического исполнения О2.1 (под крышкой ЭП):
- температура окружающего воздуха от минус 40 до плюс 60 °С;
- относительная влажность до 98 % при температуре 35°С без конденсации влаги;
- атмосферное давление от 84 до 107 kPa (от 630 до 800 мм рт.ст.).
Контроллер соответствует группе исполнения V1 по ГОСТ Р 52931 по устойчивости к механическим воздействиям.
1.2 Технические характеристики
1.2.1 Электрическое питание контроллера осуществляется:
- для КИМ1-Х-Х-380 от трехфазной сети переменного тока с напряжением 380, 400 или 415 V и частотой (50±1) или (60±1) Hz;
- для КИМ1-Х-Х-220 от однофазной сети переменного тока с напряжением 220, 230 или 240 V и частотой (50±1) или (60±1) Hz.
Допустимое отклонение напряжения питания от плюс 10 до минус 15 %. Контроллер питается от той же силовой сети, что и электропривод.
1.2.2 Потребляемая мощность контроллера не более 10 W.
При наличии нагревательного элемента потребляемая мощность увеличивается на 10 W.
1.2.3 Масса контроллеров не более:kg.
- 1,3 kg для КИМ1-1;
- 1,4 kg для КИМ1-2;
- 1,5 kg для КИМ1-3.
1.2.4 Габаритные и установочные размеры контроллеров приведены на рисунках 1-3.
а) контроллер КИМ1-1-Х-220
б) контроллер КИМ1-1-Х-380 (остальное смотри рисунок а) )
Рисунок 1 – Контроллер КИМ1-1 для механизмов МЭО(Ф)-16, 40
Разъем Х19 используется для подключения внешнего ПМУ.
Рисунок 2 – Контроллер КИМ1-2 для механизмов МЭО(Ф)250, 630, 1600, 4000, 10000 и привода ПЭМ-В
S1 – «ЗАКР»;
S2 – «МЕСТ/ДИСТ»;
S3 – «ОТКР»
Разъем Х19 используется для подключения внешнего ПМУ.
Рисунок 3 – Контроллер КИМ1-3 для приводов ПЭМ-А, ПЭМ-Б
S1 – «ЗАКР»;
S2 – «МЕСТ/ДИСТ»;
S3 – «ОТКР»
Разъем Х19 используется для подключения внешнего ПМУ.
1.2.5 Контроллер является микропроцессорным настраиваемым изделием.
Предварительная настройка параметров осуществляется на заводе изготовителе и зависит от исполнения контроллера.
Параметры настройки приведены в приложении Б.
Параметры разбиты на группы, обозначаемые латинскими буквами. Внутри группы параметры имеют порядковый номер (например – A1, B3).
1.2.6 Контроллер обладает свойством энергонезависимости: при пропадании питания все настройки сохраняются и при возобновлении питания контроллер продолжает нормальное функционирование.
1.2.7 Функциональные возможности контроллера определяются:
- программным обеспечением;
- подключением дополнительных функциональных узлов, наличие которых должно быть подтверждено соответствующими параметрами настройки.
Контроллер в зависимости от исполнения (подраздел 1.5 «Состав контроллера») может иметь опции А, Д, С и Т согласно таблице 4.
1.2.7.1 Контроллер обеспечивает:
-
измерение положения, момента, температуры двигателя, температуры контроллера;
-
управление противоконденсатным нагревателем;
-
индикацию светодиодами состояния концевых и моментных выключателей, наличия основного питания, наличие сигнала «НЕИСПРАВНОСТЬ», функционирования инфракрасного канала;
-
управление дискретными выходами сигналов «НЕИСПРАВНОСТЬ», «ГОТОВНОСТЬ», «МЕСТНОЕ УПРАВЛЕНИЕ»;
-
обмен информацией с пультом настройки ПН-2 по ИК-интерфейсу на расстоянии до 0,5 m;
-
управление двигателем ЭП с помощью силового коммутатора (плата СК);
-
контроль тока по одной фазе и отключение двигателя при перегрузке;
-
контроль собственного функционирования (самоконтроль) и исправности ЭП и арматуры;
-
соединение с компьютером через инфракрасный канал (ИК) с помощью соединения гибкого СГ9;
-
настройку режимов и параметров контроллера (дистанционно, без вскрытия ЭП) с помощью компьютера или пульта ПН-2;
-
индикацию положения выходного органа ЭП механическим указателем;
-
при наличии мезонина УСС соединение с компьютером, имеющим в качестве управляющего интерфейс RS-485 и поддерживающим протокол MODBUS RTU;
-
при наличии мезонина УСПС выдачу дискретных сигналов состояния виртуальных концевых выключателей, аналогового сигнала обратной связи по положению, подключение к компьютеру или контроллеру, имеющему в качестве управляющего интерфейса RS-485 и поддерживающему протокол MODBUS RTU;
-
при наличии мезонина УСП выдачу дискретных сигналов состояния виртуальных концевых, путевых и моментных выключателей, а также аналогового сигнал обратной связи по положению (в КИМ1-1 отсутствуют сигналы состояния моментных выключателей);
-
при наличии мезонина УАВ управление от аналогового сигнала – выполнение функции позиционера.
1.2.7.2 Контроллер выполняет измерения положения выходного органа привода с основной погрешностью не более 1,5 % и вариацией не более 1,0 %. В качестве датчика положения применяется датчик на эффекте Холла.
1.2.7.3 Контроллер может получать и обрабатывать следующие входные электрические сигналы:
-
цифровой сигнал с датчика момента на выходном органе ЭП либо дискретные сигналы моментных выключателей (отсутствуют в КИМ1-1);
-
аналоговый сигнал с позистора – датчика температуры двигателя для контроля температуры двигателя (по отдельному заказу);
-
аналоговый сигнал от датчика собственной температуры контроллера;
-
дискретные сигналы управления «ОТКРЫТЬ», «ЗАКРЫТЬ», «СТОП», «АВАРИЯ»;
-
аналоговые сигналы задания положения (0-5), (0-20), (4-20) mA при наличии опции А. Основная погрешность измерения сигнала задания положения – не более 0,5 %.
Параметры дискретных входных сигналов приведены в таблице 4а.
Таблица 4а
|
Сигналы |
Параметры |
|
«ОТКРЫТЬ» |
Постоянное или двухполупериодное выпрямленное синусоидальное |
|
«ЗАКРЫТЬ» |
напряжение со средним значением: |
|
«СТОП» |
— логический «0» (выключено) — (0 — |
|
«АВАРИЯ» |
— логическая «1» (включено) — (18 — 30) V. Полярность сигналабезразлична. Максимальный ток по цепям управления не более 5 тА. |
 V;
V;1.2.7.4 Контроллер может выдавать следующие выходные электрические сигналы:
а) дискретные сигналы состояния виртуальных выключателей:
- концевых, путевых и моментных при наличии опции Д или А – для КИМ1-2, КИМ1-3;
- концевых и путевых при наличии опции Д или А – для КИМ1-1;
- концевых при наличии опции Т.
б) дискретный сигнал «ГОТОВНОСТЬ», информирующий о готовности контроллера выполнять команды дискретного, аналогового или сетевого дистанционного управления (нет сигналов «НЕИСПРАВНОСТЬ» и «МЕСТНОЕ УПРАВЛЕНИЕ»);
в) дискретный сигнал «НЕИСПРАВНОСТЬ» о неисправности контроллера, ЭП и арматуры (описано в пункте 1.5.4);
г) дискретный сигнал «МЕСТНОЕ УПРАВЛЕНИЕ», информирующий об активизации одного из следующих источников управления контроллером: встроенного или внешнего ПМУ; дистанционного ПМУ, подключенного к дискретным входам; пульта настройки ПН-2; компьютера с программой «Эмулятор пульта настройки».
д) аналоговые сигналы положения выходного органа ЭП (0-5), (0-20), (4-20) mA при наличии опции Д, А или Т.
Параметры дискретных выходных сигналов приведены в таблице 4б.
Таблица 4б
|
Сигналы |
Параметры |
|
«КВЗ», «КВО» |
Изменение состояния выходных бесконтактных ключей.. |
|
«ПВЗ», «ПВО» |
Коммутируемое напряжение постоянного тока до 40 V. |
|
«МВЗ», «МВО» |
Коммутируемый ток до 0,3 А |
|
«ГОТОВНОСТЬ» |
|
|
«НЕИСПРАВНОСТЬ» |
|
|
«МЕСТНОЕ УПРАВЛЕНИЕ» |
1.2.7.5 Для дискретных входов существуют следующие настройки:
-
глубина подавления дребезга – означает количество циклов опроса дискретных входов, при которых их значение должно быть неизменным для принятия решения о переключении (может принимать значение от 0 до 100);
-
инверсия – значение дискретного входа может быть инвертировано.
Время цикла опроса дискретных и аналоговых (при их наличии) входов и выходов 4 ms 1.2.7.6 Контроллер имеет светодиодные индикаторы сигнализации «ОТКР», «МОМ.», «ЗАКР», «ИК», «АВАР», «ПИТ» на передней панели, работа которых приведена в таблице 5.
Таблица 5
|
Индикатор |
Состояние индикатора |
|
«ПИТ» (питание) |
— горит постоянно после включения основного питания; — мигает с частотой » 2 Hz при управлении от ПМУ |
|
«ИК» (инфракрасный канал) |
Мигает при активности ИК-интерфейса (пульт ПН-2 или соединение гибкое СГ9). |
|
«ЗАКР» (закрыто) |
— мигает при включении электродвигателя в направлении «ЗАКРЫТЬ»; — горит постоянно при срабатывании КВЗ |
|
«МОМ.» (момент) |
Горит постоянно при наличии превышения уставки по моменту в ту или другую сторону. |
|
«ОТКР» (открыто) |
— мигает при включении электродвигателя в направлении «ОТКРЫТЬ»; — горит постоянно при срабатывании КВО |
|
«АВАР» (ошибка) |
— выключен при нормальной работе; — мигает с частотой » 2 Hz при обнаружении неисправности контроллером; — горит постоянно при неисправности контроллера или сбое программы |
|
П р и м е ч а н и е— Индикаторы «ОТКР», «МОМ», «ЗАКР» горят постоянно одновременно, если требуется калибровка датчиков положения и/или момента, все мигают в режиме «калибровка датчиков» |
1.2.7.7 Контроллер может контролировать номинальную токовую уставку двигателя и отключать двигатель при перегрузке.
1.2.7.8 Максимальный коммутируемый ток выходных силовых цепей не более:
а) 10 А для КИМ1-Х-Х-380 и 5 А для КИМ1-Х-Х-220 – в продолжительном режиме включения;
б) 16 А для КИМ1-Х-Х-380 и 10 А для КИМ1-Х-Х-220 – в повторно-кратковременном реверсивном режиме с частотой включений до 630 в час и продолжительностью включений до 25 % (далее – режим ПВ 25 %).
1.2.7.9 Контроллер обеспечивает включение нагревательного элемента (НЭ) отсека при температуре отсека ниже плюс 34 °C и выключение при температуре выше плюс 35 °C.
1.2.7.10 Контроллер с опцией С или Т имеет сетевое управление.
1.2.7.11 Контроллер может управляться дискретными сигналами.
1.2.7.12 Контроллер с опцией А может управляться аналоговым сигналом, т.е. выполняет функцию позиционера.
1.2.7.13 Контроллер может выполнять защиту ЭП по моменту на выходном органе (при наличии датчика момента или моментных выключателей).
1.2.7.14 Контроллер может выполнять защиту двигателя ЭП от перегрева при наличии датчика температуры двигателя (по отдельному заказу).
1.2.7.15 Контроллер имеет встроенный пульт местного управления (ПМУ) с кнопками «ОТКР», «ЗАКР», «МЕСТ/ДИСТ». Кнопки встроенного ПМУ могут дублироваться внешним пультом местного управления, подключаемого через разъем Х19 на плате БЦП.
1.3 Состав контроллера
1.3.1 Перечень элементов (узлов, плат и т.п.) контроллера существующих модификаций соответствует таблице 6. Расположение основных элементов контроллера представлено на рисунке 4.
Таблица 6 – Перечень элементов контроллера
|
Наименование |
Шифр |
Обозначение |
|
Плата процессора |
БЦП |
ЯЛБИ.687243.418 |
|
Силовой коммутатор |
СК-380 |
ЯЛБИ.687243.417 |
|
СК-220 |
ЯЛБИ.687243.424 |
|
|
Узел сопряжения с сетью |
УСС |
ЯЛБИ.687243.338 |
|
Узел сигнализации положения |
УСП |
ЯЛБИ.687243.339 |
|
Узел аналогового ввода |
УАВ |
ЯЛБИ.687243.340 |
|
Узел сигнализации положения сетевой |
УСПС |
ЯЛБИ.687243.406 |
|
Плата фильтров (ПФ) |
ЯЛБИ.687243.416 |
|
|
Блок датчика положения (ДП) |
ЯЛБИ.301126.028 |
1.3.2 Исполнения контроллера по составу соответствуют таблице 7.
Таблица 7 – Исполнения контроллера
|
Исполнения контроллера |
БЦП |
СК-380 |
СК-220 |
УСС |
УСП |
УАВ |
УСПС |
ПФ |
Блок ДП |
|
КИМ1-1(2,3)-С-380 |
+ |
+ |
+ |
+ |
+ |
||||
|
КИМ1-1(2,3)-С-220 |
+ |
+ |
+ |
+ |
+ |
||||
|
КИМ1-1(2,3)-А-380 |
+ |
+ |
+ |
+ |
+ |
+ |
|||
|
КИМ1-1(2,3)-А-220 |
+ |
+ |
+ |
+ |
+ |
+ |
|||
|
КИМ1-1(2,3)-Д-380 |
+ |
+ |
+ |
+ |
+ |
||||
|
КИМ1-1(2,3)-Д-220 |
+ |
+ |
+ |
+ |
+ |
||||
|
КИМ1-1(2,3)-Т-380 |
+ |
+ |
+ |
+ |
+ |
||||
|
КИМ1-1(2)-Т-220 |
+ |
+ |
+ |
+ |
+ |
||||
|
П р и м е ч а н и я – Знак «+» означает наличие платы в составе контроллера |
Рисунок 4 – Расположение элементов контроллера
*Разъем Х3 в контроллерах с напряжением питания 220 V отсутствует
1.4 Устройство и выполняемые функции
1.4.1 Контроллер размещается под крышкой ЭП. Крышка имеет окно для наблюдения за органами индикации контроллера. Устройство контроллера представлено на рисунке 5.
Платы контроллера крепятся к панели, несущей винтами через стойки.
Сочленение контроллера с валом, передающим положение выходного органа ЭП, выполнено через типовую муфту датчика положения для МЭО(Ф) или через шестерню на промежуточный редуктор для ПЭМ. Вал контроллера передает вращение на датчик положения через пару зубчатых колес.
Датчик положения допускает вращение вала без ограничения.
Предусмотрена возможность совмещения диапазонов датчика положения контроллера и выходного органа привода.
Структурная схема контроллера представлена на рисунке 6.
1.4.2 Базовыми элементами в составе контроллера являются:
- металлический каркас;
- механический указатель положения;
- плата процессора БЦП;
- блок датчика положения (ДП);
- аналоговые входы измерения сигналов от ДП, ДМ и ДТ;
- силовой коммутатор (СК) с узлом защиты по току (УЗТ);
- плата фильтров (ПФ).
Рисунок 5 – Устройство контроллера
Рисунок 6 – Структурная схема контроллера
БЦП — плата процессора;
ДП — датчик положения;
ДМ — датчик момента;
ДТ – датчик температуры двигателя;
НЭ — нагревательный элемент;
ПН-2 — пульт настройки;
ПФ — плата фильтров;
СК — силовой коммутатор;
УАВ — узел аналогового ввода;
УСС — узел сопряжения с сетью;
УСП — узел сигнализации положения;
УСПС — узел сигнализации положения сетевой
Датчики ДМ и ДТ входят в состав электропривода.
БЦП содержит следующие функциональные блоки:
- блок питания;
- процессор;
- индикаторы состояния;
- цифровые входы сигналов датчиков;
- дискретные входы сигналов управления;
- дискретные выходы сигналов управления силовым коммутатором (СК);
- дискретный выход сигнала «НЕИСПРАВНОСТЬ»;
- дискретный выход сигнала «ГОТОВНОСТЬ»;
- дискретный выход сигнала «МЕСТНОЕ УПРАВЛЕНИЕ»;
- встроенный ПМУ.
1.4.3 Дополнительные элементы контроллера в зависимости от назначения представлены в таблице 8.
1.4.4 Внешними устройствами, подключаемыми к контроллеру, могут быть:
- пульт настройки ПН-2, обеспечивающий связь с контроллером по инфракрасному (ИК) каналу связи для настройки и управления контроллером;
- компьютер, подключаемый по интерфейсу RS-485 или по ИК-интерфейсу (с помощью СГ9), для настройки и управления контроллером;
- внешний ПМУ;
- другой источник управления (промышленный контроллер, дистанционный ПМУ и т.п.), подключаемый через дискретные входы, или аналоговый вход, или сетевой интерфейс RS-485.
Таблица 8 – Дополнительные элементы контроллера
|
Узел, плата |
Назначение |
|
Узел сопряжения с сетью УСС |
Мезонин сетевого интерфейса RS-485 для подключения сети MODBUS. |
|
Узел сигнализации положения УСП |
Мезонин, содержащий:
|
|
Узел сигнализации положения сетевой УСПС |
Мезонин, содержащий:
|
|
Узел аналогового ввода УАВ Мезонин аналогового ввода сигнала задания положения. * Отсутствуют в КИМ1-1. П р и м е ч а н и я
|
* Отсутствуют в КИМ1-1.
1.4.5 В базовом составе контроллер может выполнять следующие функции:
- измерение положения, момента*, температуры двигателя, температуры контроллера;
- индикацию светодиодами состояния концевых и моментных* выключателей, наличия основного питания, функционирования ИК, наличие сигнала «НЕИСПРАВНОСТЬ»;
- управление дискретным выходом сигнала «НЕИСПРАВНОСТЬ»;
- управление нагревательным (противоконденсатным) элементом;
- настройку параметров с помощью пульта настройки ПН-2 или компьютера;
- управление движением выходного органа ЭП;
- контроль тока по одной из фаз и отключение двигателя при перегрузке.
1.4.6 В контроллер встроен нагревательный элемент (НЭ), использующийся для подсушки внутреннего пространства электропривода.
1.4.7 При наличии опции С или Т контроллер может быть подключен к компьютеру, контроллеру, имеющему в качестве управляющего интерфейса RS-485 и поддерживающему протокол MODBUS RTU.
1.4.10 При наличии опции А контроллер может управляться аналоговым сигналом, т.е. выполнять функцию позиционера.
1.4.11 При наличии опции Д, А или Т контроллер может выдавать дискретные сигналы состояния виртуальных концевых (для опции Д или А также – путевых и моментных* выключателей), а также аналоговый сигнал обратной связи по положению.
Эти сигналы могут быть использованы для индикации состояния привода и положения выходного органа на щите управления и/или организации схем управления с применением промышленного контроллера.
Опубликовано на Яндекс.Дзен
Интеллектуальный блок КИМ3 обеспечивает расширенный набор функций, позволяющий при эксплуатации электропривода и арматуры повысить точность управления, обеспечить контроль, удобную настройку, хранение заданных параметров, введение архива работы, защиту в нештатных ситуациях, сократить количество линий связи и силовых кабелей, стоимость и время работ при монтаже и техническом обслуживании.
Интеллектуальный блок КИМ3 создает в энергонезависимой памяти архив работы и состояния электропривода и арматуры. Архив состоит из четырех частей: статистика, события, активность, графики момента на выходном органе электропривода и тока двигателя электропривода. Данные архива могут быть сохранены в виде текстового файла в программе «Конфигуратор».
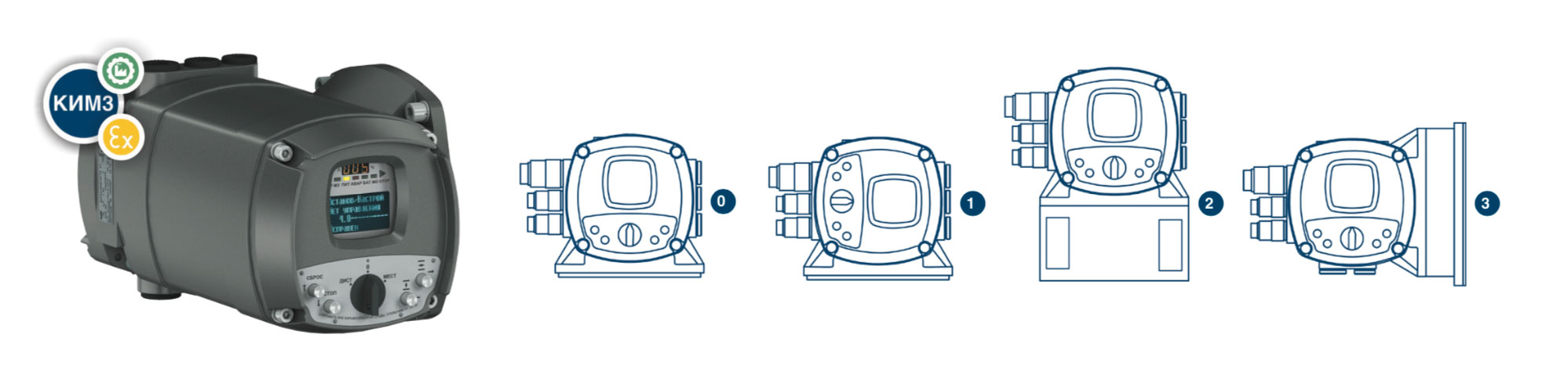
Интеллектуальный блок КИМ3 может устанавливаться на электроприводе (конструктивные исполнения 0 , 1 и 2) и отдельно от него (конструктивное исполнение 3). Панель местного управления КИМ3 в зависимости от пространственного расположения электропривода с арматуроq на объекте может быть повернута в необходимое удобное положение. Настройка электропривода при основном питании осуществляется программно на трубопроводной арматуре без вскрытия оболочки, параметры сохраняются в энергонезависимой памяти.

Состав панели местного управления (ПМУ) КИМ3
- Трехразрядный цифровой дисплей для индикации положения
- Светодиодная индикация для отображения направления движения, конечных положений, превышения момента, неисправности, необходимости замены батареи
- Графический ЖК дисплей для индикации общей информации при работе и настройке, неисправности, текущего положения, момента, параметров настройки, кодов неисправностей, вида управления
- Переключатель режимов управления (селектор)
- Кнопки управления и настройки
- Замок для механической блокировки
Управление электроприводом и арматурой через интеллектуальный блок КИМ3 осуществляется местно (с панели ПМУ) и дистанционно. Возможности дистанционного управления, состав и виды входных и выходных сигналов зависят от выбранной конфигурации и дополнительных опций.
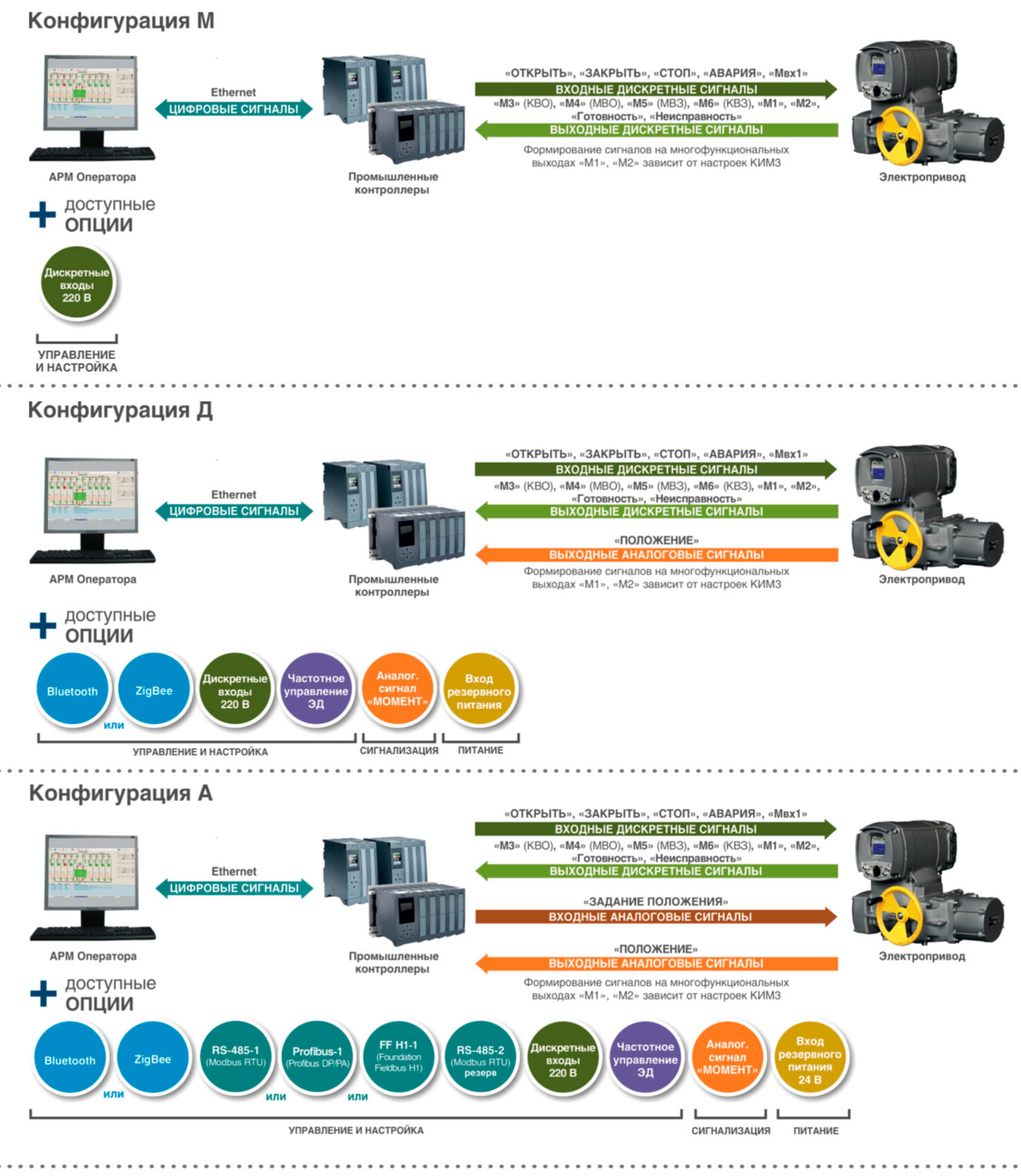
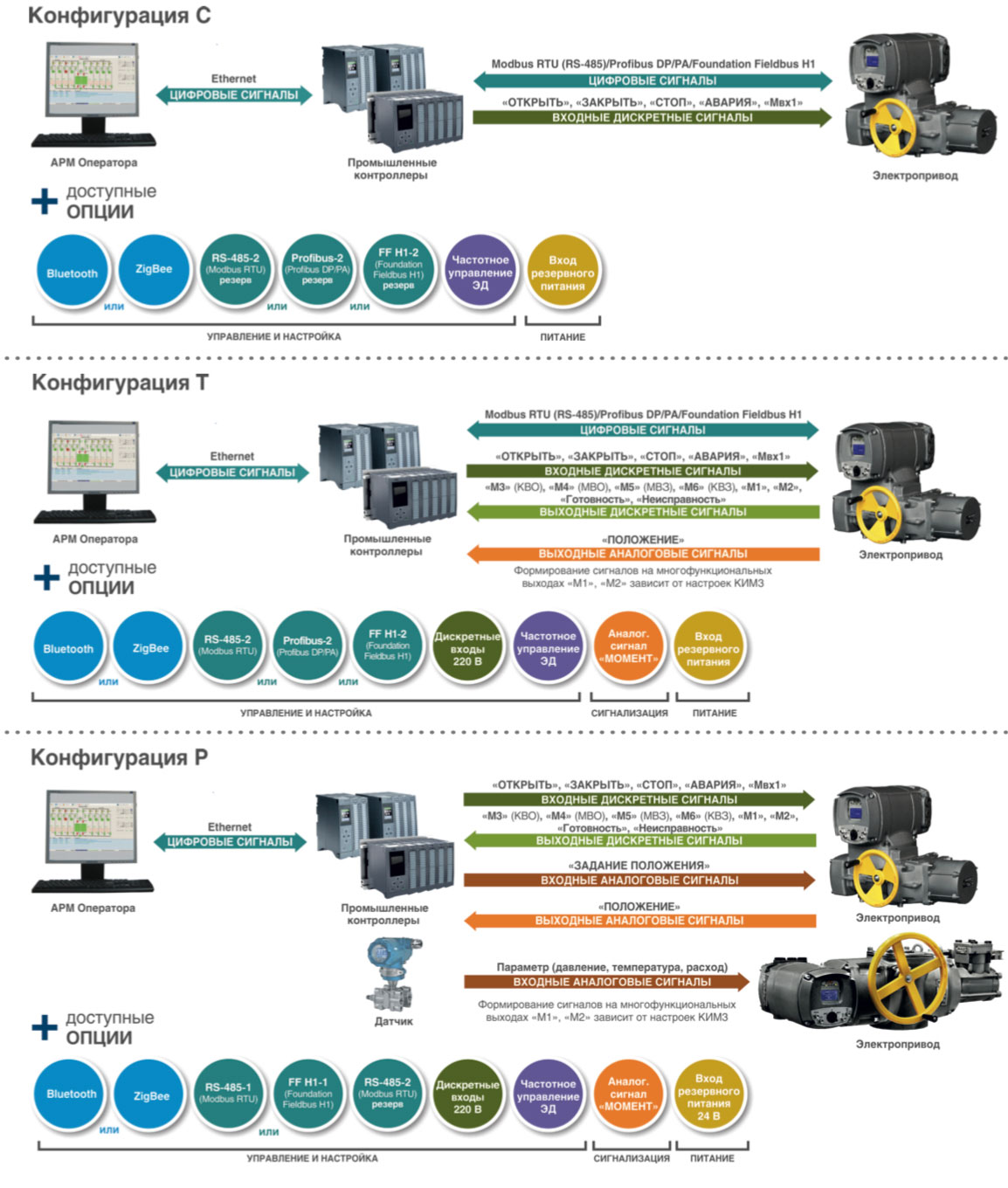
«Мвх1» – многофункциональныи? вход, «КВО» и «КВ3» – концевые выключатели открытия и закрытия, «МВО» и «МВЗ» – моментные выключатели открытия и закрытия, «М1» и «М2» – многофункциональные выходы.
 Схема подключения ЭП с интеллектуальным блоком управления КИМ3
Схема подключения ЭП с интеллектуальным блоком управления КИМ3
Каталог «Электроприводы для автоматизации трубопроводной арматуры»
 Сертификаты соответствия
Сертификаты соответствия
Механизмы и приводы исполнительные электрические однооборотные МЭО и МЭОФ |
||
| с БКВ, БСПР МЭО-6,3, -12,5, -16, -25 МЭОФ-6,3, 12,5, -16, -25 |
  |
ЯЛБИ.421321.060РЭ МЭО-6,3-99, МЭО-12,5-99, МЭО-16-99 МЭО-25-99 МЭОФ-6,3-98, МЭОФ-12,5-98, МЭОФ-16-98 МЭОФ-25-98 |
| БКВ, БСПТ, БСПИ, БСПР, с цифровым блоком датчиков БД-1 МЭО-6,3, -16, -40 МЭОФ-6,3,-16,-32,-40 |
  |
ЯЛБИ.421311.002РЭ МЭО-6,3-01 МЭО-16-93, МЭО-16-01, МЭО-16-99К МЭО-40-93, МЭО-40-01(К), МЭО-40-99К МЭОФ-6,3-02 МЭОФ-16-96(К), МЭОФ-16-02 МЭОФ-32-96 МЭОФ-40-96(К), МЭОФ-40-99К, МЭОФ-40-02 |
| с БКВ, БСПТ 10М, БСПТ-10АМ, БСПР-10М, БСПИ-10, цифровым блоком датчиков БД-1 МЭО-16, -40 |
|
ЯЛБИ.421311.005РЭ МЭО-16-90 (-93) МЭО-40-90 (-93) |
| с БКВ, БСПТ 10М, БСПТ-10АМ, БСПР-10М, БСПИ-10, цифровым блоком датчиков БД-1 МЭО-40, -100, -250 МЭОФ-40, -100, -250 |
  |
ЯЛБИ.421321.073РЭ МЭО-40-99, МЭО-100-99(К) МЭО-250-99(К) МЭОФ-40-99, МЭОФ-100-99(К) МЭОФ-250-99(К) |
| с БСПТ, БСПР, БКВ, БСПИ-10, цифровым блоком датчиков БД-1 МЭО-250, -630, -1600 МЭОФ-320,-630, -1000,-1600-, -2500 |
 |
ЯЛБИ.421321.004РЭ МЭО-250-92К(Б), МЭО-630-92К(Б) МЭО-1600-92К(Б) МЭОФ-320-97К, МЭОФ-630-96К, МЭОФ-630-97К МЭОФ-1000-96К, МЭОФ-1600-96К МЭОФ-2500-96К |
| с БКВ, БСПТ, БСПИ, БСПР, цифровым блоком датчиков БД-1 МЭО-4000, -10000К МЭОФ-4000К |
   |
ЯЛБИ.421321.036РЭ МЭО-4000-97К, МЭО-10000-97К МЭОФ-4000-99К |
Механизмы и приводы новые с повышенным функционалом |
||
| МЭО-250, -630, -1000, -1600, -2000, -2500, -4000
МЭОФ-250, -630, -1000, -1600, -2000, -2500, -4000 |
  |
ЯЛБИ.421321.101РЭ МЭО(Ф)-250-08К, МЭО(Ф)-630-08К МЭО(Ф)-1600-08К, МЭО(Ф)-2500-09К МЭО(Ф)-4000-09К |
| МЭОФ-100, -250, -320, -400, -630 |  |
ЯЛБИ.421321.104РЭ МЭОФ-100-10(К), МЭОФ-250-10(К) МЭОФ-320-10К, МЭОФ-400-10(К) МЭОФ-630-10(К) |
| с интеллектуальным блоком КИМ1: МЭО-6,3, -16, -40 МЭОФ-6,3, -16, -16, -32, -40 |
|
ЯЛБИ.421311.054РЭ МЭО-6,3-07, МЭО-16-07(К), МЭО-40-07(К) МЭОФ-6,3-07, МЭОФ-16-07, МЭОФ-16-08К МЭОФ-32-08К, МЭОФ-40-07, МЭОФ-40-08К |
| с интеллектуальным блоком КИМ1: МЭО-100, -250 МЭОФ-100, -250 |
 |
ЯЛБИ.421311.050РЭ МЭО-100-07К, МЭО-250-07К МЭОФ-100-06К, МЭОФ-250-06К |
| с интеллектуальным блоком КИМ1: МЭО-250, -630, -1600 МЭОФ-320, -630, -1000, -1600, -2500 |
|
ЯЛБИ.421311.051РЭ МЭОФ-320-07К, МЭОФ-1000-07К МЭОФ-630-07К, МЭОФ-1600-07К МЭОФ-2500-07Кs |
| с интеллектуальным блоком КИМ2: |  |
ЯЛБИ.421321.119РЭ |
| с интеллектуальным блоком КИМ3: МЭОФ-250, -630, -1000, -1600, -2000,-2500, -4000 МЭОФ-100, -250, -320, -400, -630 |
  |
ЯЛБИ.421321.115РЭ МЭОФ-250-08К, МЭОФ-630-08К МЭОФ-1600-08К, МЭОФ-2500-09К МЭОФ-4000-09К МЭОФ-100-10(К), МЭОФ-250-10(К) |
Механизмы и приводы исполнительные электрические многооборотные |
||
| с БКВ, БСПТ, БСПР, БСПИ, контроллером КИМ1 ПЭМ-А ПЭМ-Б с БКВ, БСПТ, контроллером КИМ1 ПЭМ-В |
   |
ЯЛБИ.421312.014РЭ |
| новые с повышенным функционалом с цифровым блоком датчиков БД-2 ПЭМ-А100-7 (-12, -22, -48, -96) ПЭМ-Б250-6 (-12, -22, -48, -96) |
 |
ЯЛБИ.421312.030РЭ |
| Привод электрический многооборотный интеллектуальный с КИМ2 |  |
ЯЛБИ.421312.050РЭ |
| Привод электрический многооборотный интеллектуальный с КИМ3 |  |
ЯЛБИ.421312.040РЭ |
Механизмы и приводы исполнительные электрические прямоходные |
||
| с БКВ, БСПР-12 МЭПК-800, -1600, -2500 |
 |
ЯЛБИ.421323.002РЭ |
| с БКВ, БСПТ-10, БСПР-10М, БСПИ-10, цифровым блоком датчиков БД-1 МЭПК-6300 |
 |
ЯЛБИ.421323.004РЭ |
| с БКВ, БСПТ, БСПР МЭП-18000, -20000, 25000 |
 |
ЯЛБИ.421323.005РЭ МЭП-18000-02К МЭП-20000-99, МЭП-20000-00(К) МЭП-25000-99 МЭП-25000-00(К) |
| Механизм сигнализации положения МСП: |  |
ЯЛБИ.421321.013РЭ МСП-1-013РЭ |