|
Наиль Загидуллин |
|
МБОУ СОШ № 2 с. Стерлибашево |
|
Лабораторные работы на Arduino |
|
Робототехника |
Оглавление
Лабораторная работа № 1 Светодиод 2
Сборка элементов на плате 4
Лабораторная работа № 2 Управляемый «программно» светодиод 7
Лабораторная работа № 3 Управляемый вручную светодиод 10
Сборка элементов на плате 12
Лабораторная работа № 4.1 Пьезодинамик 13
Сборка элементов на плате 13
Лабораторная работа № 4.2 Управляемый пьезодинамик 15
Сборка элементов на плате 15
Лабораторная работа № 5 Фоторезистор 17
Сборка элементов на плате 19
Лабораторная работа № 6 Кнопка 20
Лабораторная работа № 7 Термистор 22
Лабораторная работа № 8 Синтезатор 24
Лабораторная работа № 9 Взаимодействие Arduino с семисегментным индикатором 25
Лабораторная работа № 10 Обмен данными Arduino с ПК 27
Лабораторная работа № 11 Дисплей LCD 12С интерфейс 28
Лабораторная работа № 12 Сервопривод 30
Лабораторная работа № 13 Шаговый двигатель 32
Лабораторная работа № 13 Двигатель постоянного тока 35
Лабораторная работа № 14 ИК-датчик и ИК пульт 37
Лабораторная работа № 15 Bluetooth модуль 40
Лабораторная работа № 16 Дальномер 42
Лабораторная работа № 17 Датчик скорости 44
Приложения 46
Работа с набором «Конструктор программируемых моделей инженерных систем». Первое подключение. 4
Звездные войны 46
Виртуальный тренажёр на сайте К. Полякова 49
Скетч «Светофор» на тренажёре К. Полякова 1
Скетч «Светофор» на Ардуино 7
Лабораторная работа № 1 Светодиод
Цель: Научиться работать с виртуальным тренажёром Arduino
-
Зайдите на сайт: https://www.tinkercad.com/joinclass/YXHUNU9GQUEQ1
-
Авторизуйтесь используя один их ниже представленных аккаунтов
-
Выберите Цепи – Создать цепь
-
Введите название проекта Проект 1
-
Перетащите на рабочее поле Arduino Uno 3 и дайте ему имя Ардуино
-
Перетащите на рабочее поле Малую макетную плату (Breadbord) и дайте ему имя Плата
-
Перетащите на рабочее поле Светодиод (Led) и дайте ему имя Светодиод
-
Перетащите на рабочее поле Резистор (Resistor) и дайте ему имя Резистор, 220 Ω


Поворот элемента соединитель
-
 Поверните Резистор, выберите соединитель обычный
Поверните Резистор, выберите соединитель обычный
Соедините элементы так, как показано на рисунке:


 Поверните Резистор, выберите соединитель обычный
Поверните Резистор, выберите соединитель обычный-
Нажмите кнопку Код. Из выпадающего списка выберите Текст.
-
Введите код программы (скетча), можно скопировать и вставить:
int led = 8;
void setup()
{
pinMode(led, OUTPUT);
}
void loop()
{
digitalWrite(led, HIGH);
delay(1000);
digitalWrite(led, LOW);
delay(1000);
}
-
Нажмите кнопку Начать моделирование (светодиод должен моргать)
-
Нажмите кнопку Остановить моделирование (светодиод перестает моргать)
Пояснение кода:
int led = 8; //объявление переменной целого типа, содержащей номер порта к которому мы подключили второй провод
void setup() //обязательная процедура setup, запускаемая в начале программы; объявление процедур начинается словом void
pinMode(led, OUTPUT); //объявление используемого порта, led — номер порта, второй аргумент — тип использования порта — на вход (INPUT) или на выход (OUTPUT)
void loop() //обязательная процедура loop, запускаемая циклично после процедуры setup
digitalWrite(led, HIGH); //эта команда используется для включения или выключения напряжения на цифровом порте; led — номер порта, второй аргумент — включение (HIGH) или выключение (LOW)
delay(1000); //эта команда используется для ожидания между действиями, аргумент — время ожидания в миллисекундах (1 с = 1000 мс)
Дополнительное задание. Запустите модель с новыми параметрами:
Измените частоту мигания светодиода с периодом 2 с; 0, 5 с
Переключите светодиод на пин 7 и отредактируйте код на int led = 7;
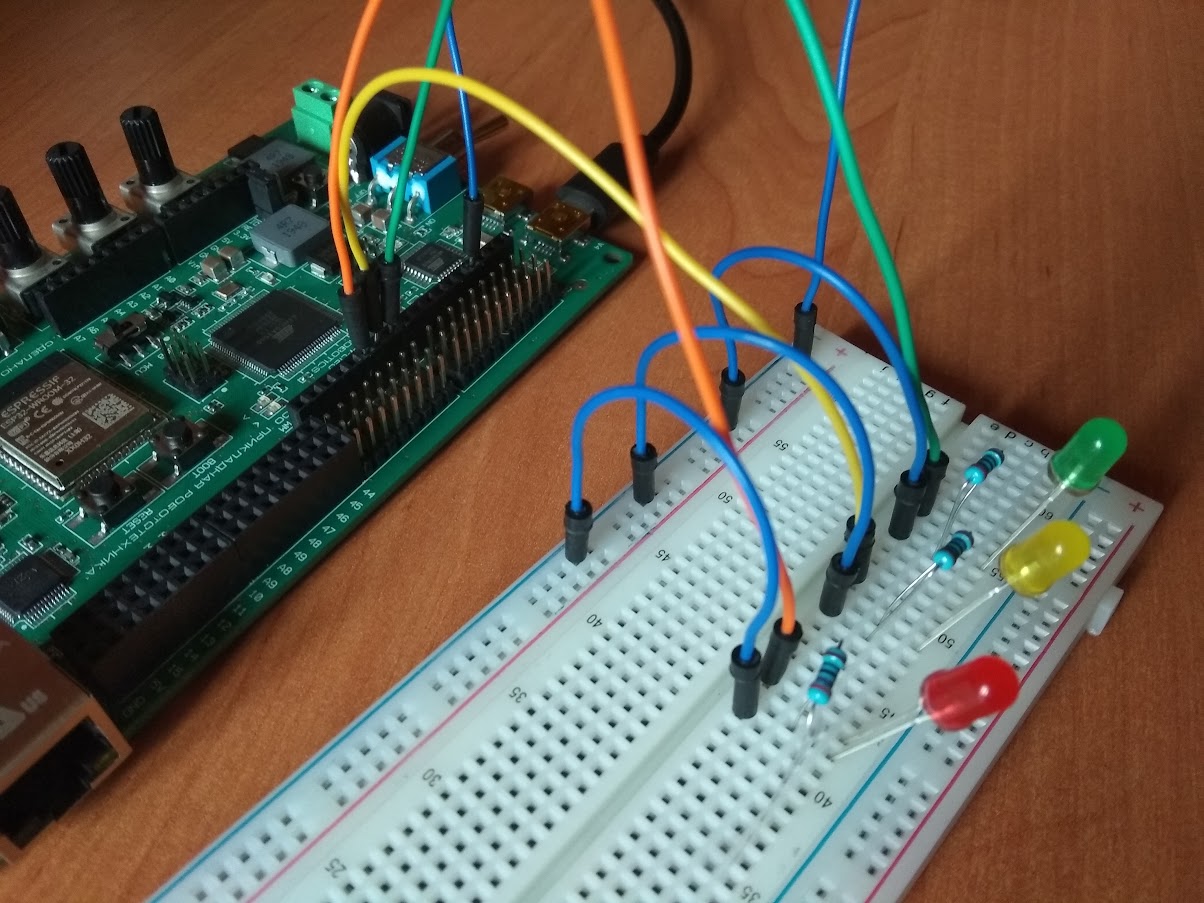
Лабораторная работа № 1.1 Работа с набором «Конструктор программируемых моделей инженерных систем». Первое подключение.
-
Запустить на компьютере программу Arduino IDE
-
Подключите микроконтроллер через USB кабель к компьютеру
-
Выберите в программе нужную плату и порт. Инструменты – плата –
Arduino Mega or Mega 2650. Инструменты – порт – СОМ 4 (цифра может быть другой)
Наберите тестовую программу:
int led = 13;
void setup()
{
pinMode(led, OUTPUT);
}
void loop()
{
digitalWrite(led, HIGH);
delay(1000);
digitalWrite(led, LOW);
delay(1000);
}
-
Нажмите кнопку Загрузка. (программа попросит сохранить файл, сохраните, выбрав имя test)
Компьютер должен быть подключен к Интернет! Разрешить брандмауэру выход программы в Интернет. -
После загрузки скетча на плате начнет мигать светодиод
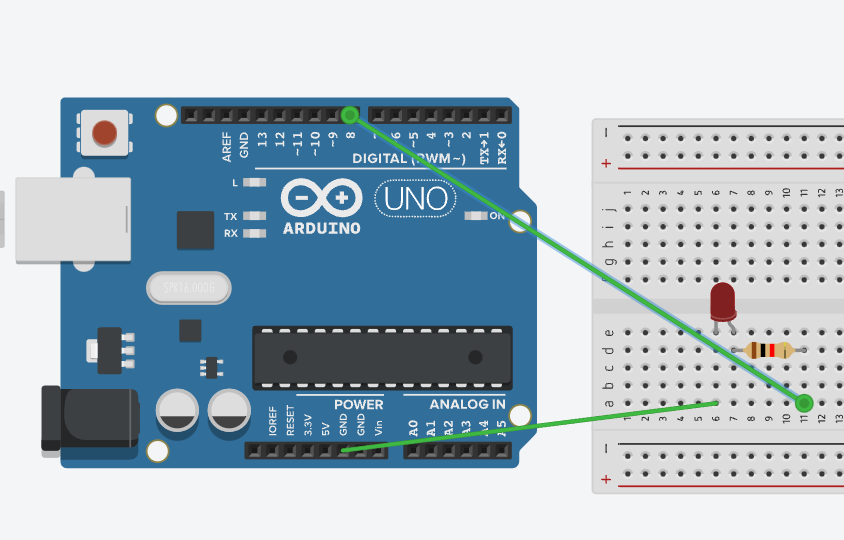
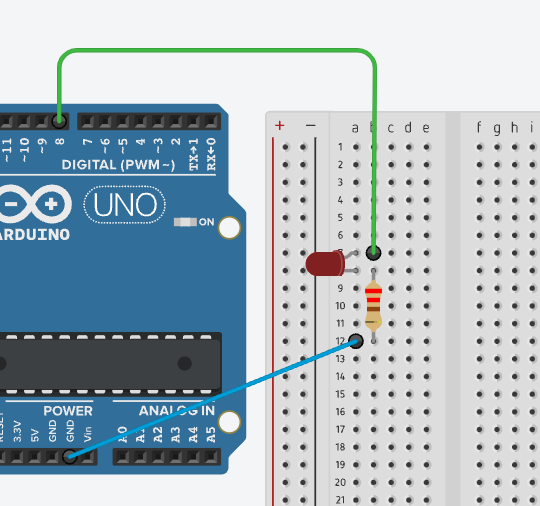
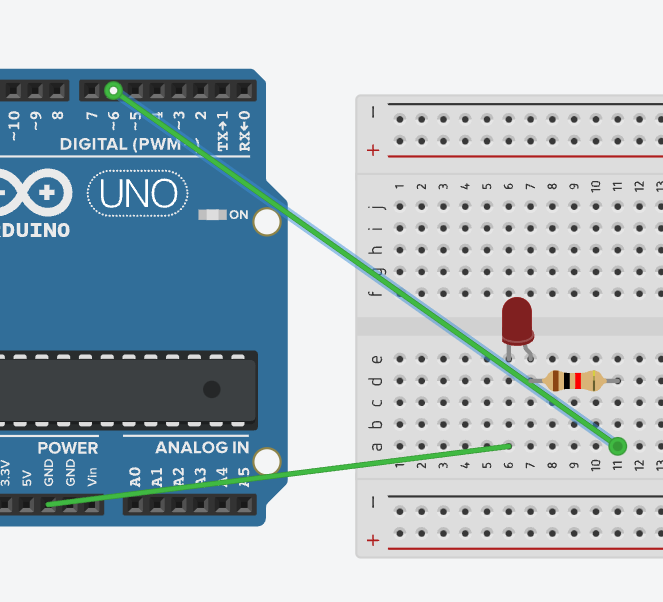
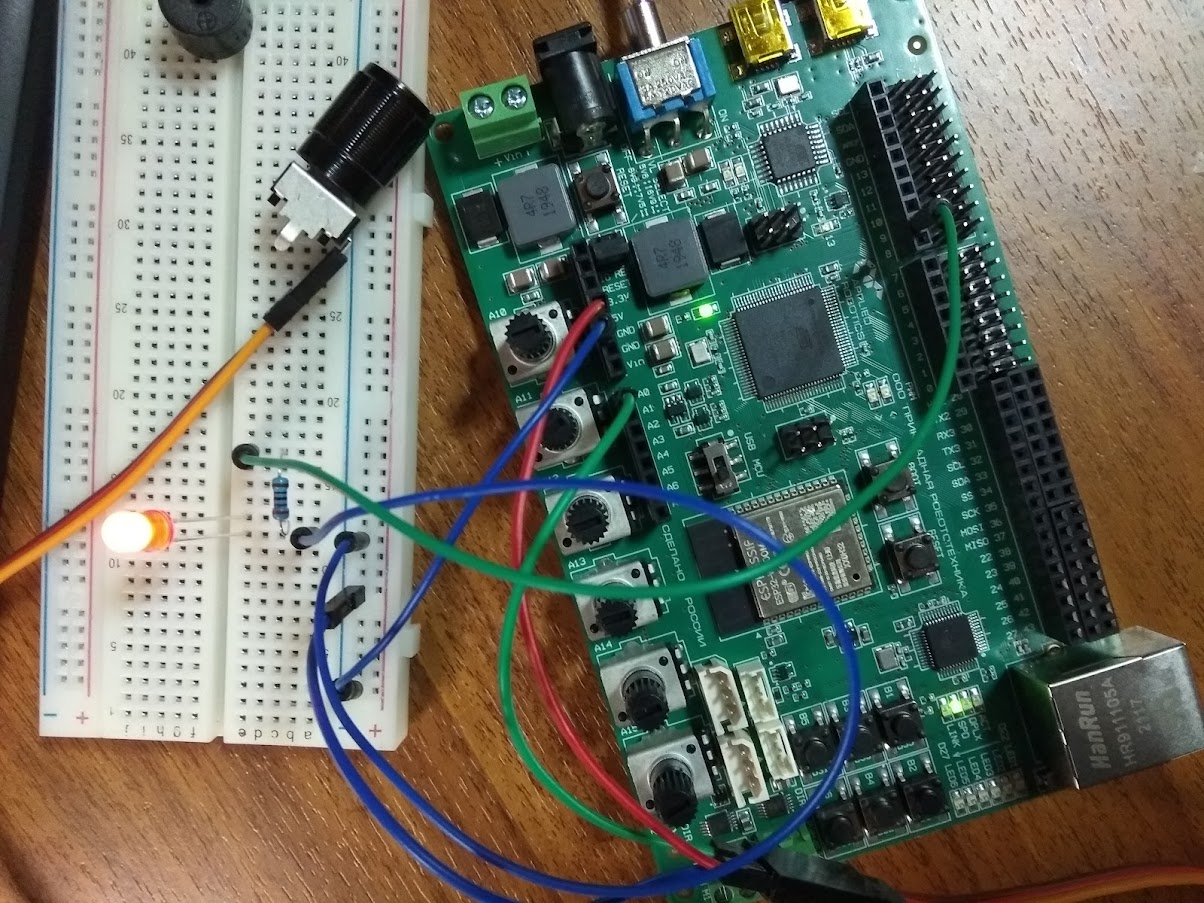
Лабораторная работа № 1.2 Сборка элементов на плате
Оборудование: Макетная плата, 2 провода папа-папа, светодиод, резистор на 220 Ом.




Общие контакты
GND
Pin 8
Сборка элементов на плате производится по схеме:
Верхний провод соединяет свободный конец светодиода и пин под номером 8 на плате
Нижний провод соединяет своболный конец резистора и контакт GDN (минус или земля)
Получается последовательная цепь.
Введите код в программу Arduino IDE
int led = 8;
void setup()
-
Сохраните программу под именем Lab1.2
-
Нажмите кнопку Загрузка.
-
После загрузки скетча светодиод начнет мигать
{
pinMode(led, OUTPUT);
}
void loop()
{
digitalWrite(led, HIGH);
delay(1000);
digitalWrite(led, LOW);
delay(1000);
}
Приложение к ЛР № 1.2
|
Загрузка Pin 8 GND |
|
Если светодиод не горит, поменяйте контакты светодиода |


Лабораторная работа 1.3 Проект «Светофор» на Ардуино
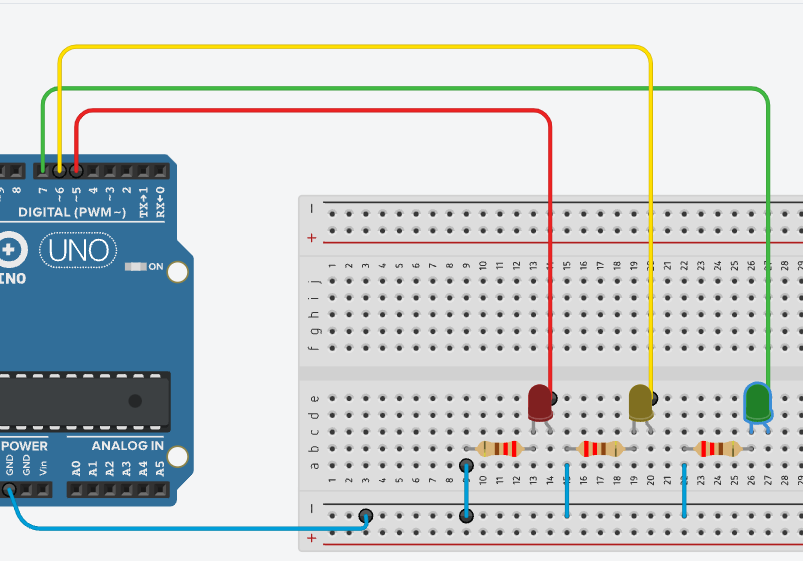
Код программы
int led_G = 7;
int led_Y = 6;
int led_R = 5;
void setup()
{
pinMode(led_R, OUTPUT);
pinMode(led_Y, OUTPUT);
pinMode(led_G, OUTPUT);
}
void loop()
{
//red
digitalWrite(led_R, HIGH);
delay(3000);
//===red-yellow
digitalWrite(led_Y, HIGH);
delay(2000);
digitalWrite(led_R, LOW);
digitalWrite(led_Y, LOW);
//===green
digitalWrite(led_G, HIGH);
delay(3000);
digitalWrite(led_G, LOW);
//==yellow
digitalWrite(led_Y, HIGH);
delay(2000);
digitalWrite(led_Y, LOW);
delay(1000);
}
Лабораторная работа № 2 Управляемый «программно» светодиод
Цель работы: понять принцип работы широтно-импульсной модуляции (ШИМ). Научиться использовать ШИМ в проектах на базе Arduino.
Широтно-импульсная модуляция (ШИМ) — это метод получения изменяющегося аналогового значения посредством цифровых устройств.
Для ШИМ используется функция analogWrite(nun, значение); где пин — номер контакта Arduino, значение — число от О до 255. Например, значение 153 будет соответствовать величине тока в 3 вольта, а 76 — 1,5 вольт. 255 – 5 вольт. 0 – 0 вольт.
Ход работы:
Соберите схему (см. рис). Напишите код скетча.
|
|
// ШИН int led = 6; void setup() { pinMode(led, OUTPUT); } void loop() { //3 Вольта analogWrite(led, 153); delay(1000); //1,5 Вольта analogWrite(led, 76); delay(1000); //5 Вольт analogWrite(led, 255); delay(1000); } |
Светодиод должен мигать с переменной яркостью
Доп. Задание. Измените код так, чтобы
-
Изменилась скорость мигания светодиода
-
Изменилась яркость мигания светодиода
Источник: Лабораторная работа №4 «Широтно-импульсная модуляция» — Программирование микроконтроллера Arduino в информационно-управляющих системах (bstudy.net)
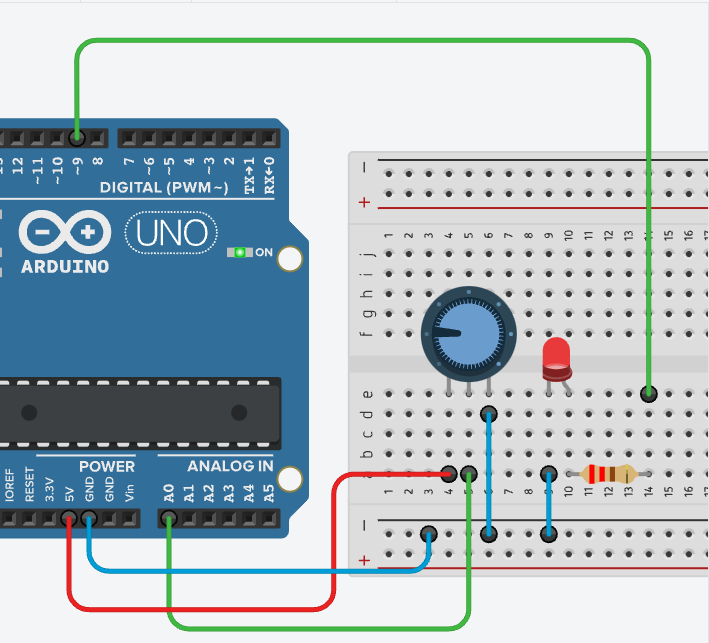
Лабораторная работа № 3 Управляемый вручную светодиод
Цель: Знакомство с устройством Потенциометра
Потенциометр — это переменный резистор с регулируемым сопротивлением. Потенциометры используются в робототехнике как регуляторы различных параметров — громкости звука, мощности, напряжения и т.п. В нашей модели от поворота ручки потенциометра будет зависеть яркость светодиода
Оборудование: Малая макетная плата, резистор (220 В), светодиод, потенциометр,
Соединители: удлинитель -1, провода: папа-мама-3, папа-папа -3)
Соберите схему:
Тип провода – Схема. После соединения измените цвет провода.
|
Земля |


// даём имена пинов со светодиодом
// и потенциометром
int led =9
int pot= A0
void setup()
{
// пин со светодиодом — выход
pinMode(led, OUTPUT);
// пин с потенциометром — вход
pinMode(pot, INPUT);
}
void loop()
{
// объявляем переменную x
int x;
// считываем напряжение с потенциометра:
// будет получено число от 0 до 1023
// делим его на 4, получится число в диапазоне
// 0-255 (дробная часть будет отброшена)
x = analogRead(pot) / 4;
// выдаём результат на светодиод
analogWrite(led, x);
}
Код программы:
int led = 9;
int pot = A0;
void setup()
{
pinMode(led, OUTPUT);
pinMode(pot, INPUT);
}
void loop()
{
int x;
x = analogRead(pot)/4;
analogWrite(led, x);
}


Загрузите программу и покрутите ручкой потенциометра – яркость светодиода должна изменятся
Источник:
Arduino для начинающих. Урок 3. Подключение потенциометра | Занимательная робототехника (edurobots.ru)
Сборка элементов на плате
|
|
-
Если светодиод не горит — поменяйте контакты светодиода
-
Если от потенциометра идёт дым и запах отключите питание. Установите ручку потенциометра в среднее положение и повторите попытку
-
У Потенциометра полярность крайних контактов (+ и -) произвольная
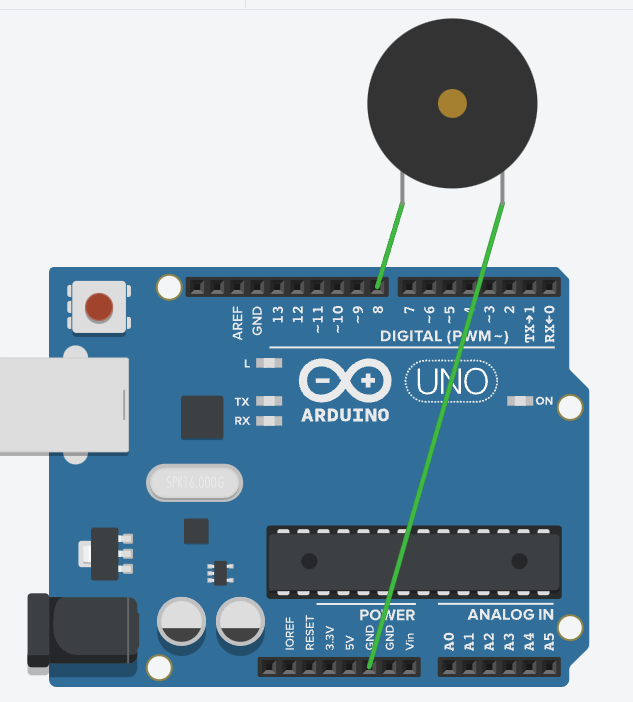
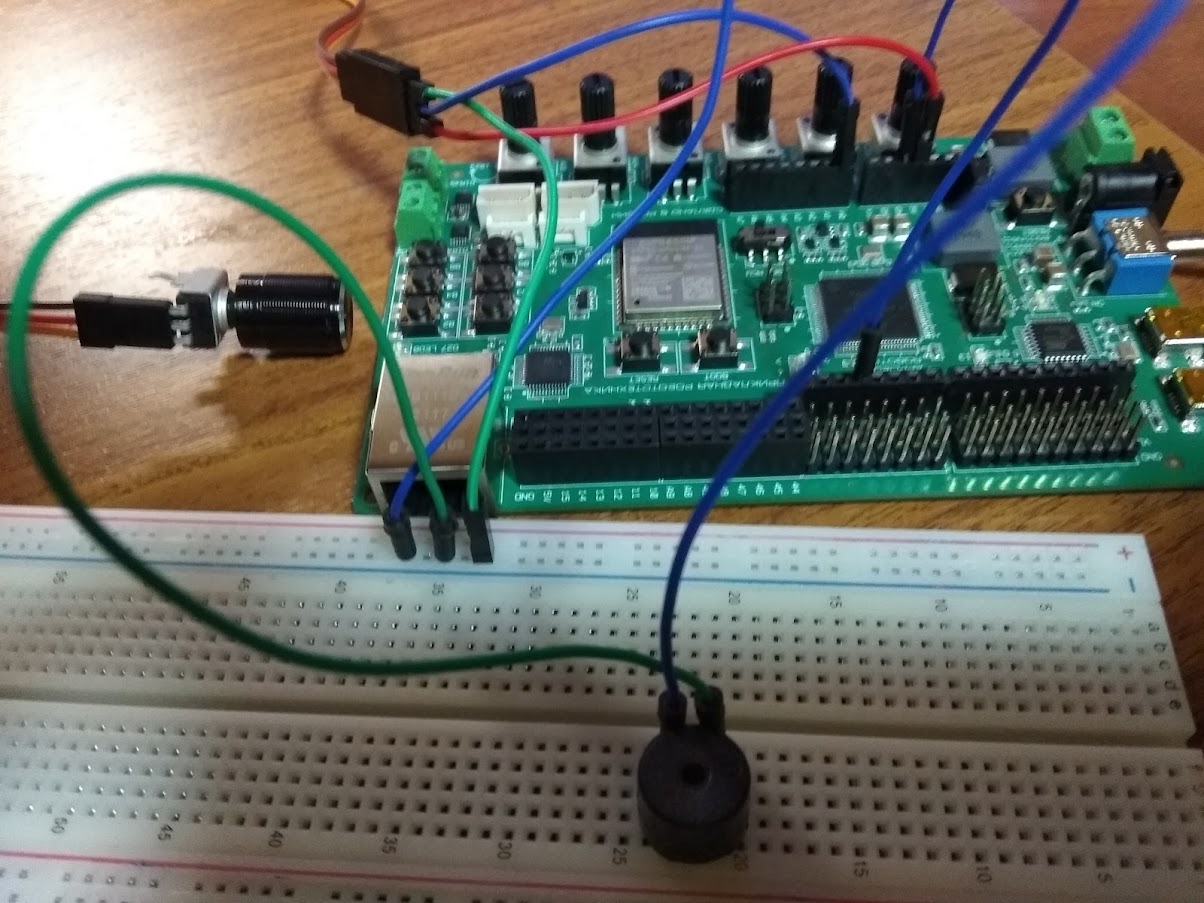
Лабораторная работа № 4.1 Пьезодинамик
Цель: Знакомство с работой пьезоэлемента
Источник:
Arduino для начинающих. Урок 6. Подключение пьезоэлемента | Занимательная робототехника (edurobots.ru)
Пьезоэлемент — электромеханический преобразователь, одним из разновидностей которого является пьезоизлучатель звука, который также называют пьезодинамиком, просто звонком или английским buzzer. Пьезодинамик переводит электрическое напряжение в колебание мембраны. Эти колебания и создают звук
-
Доп. Информация:
Приложение: Звездные войны
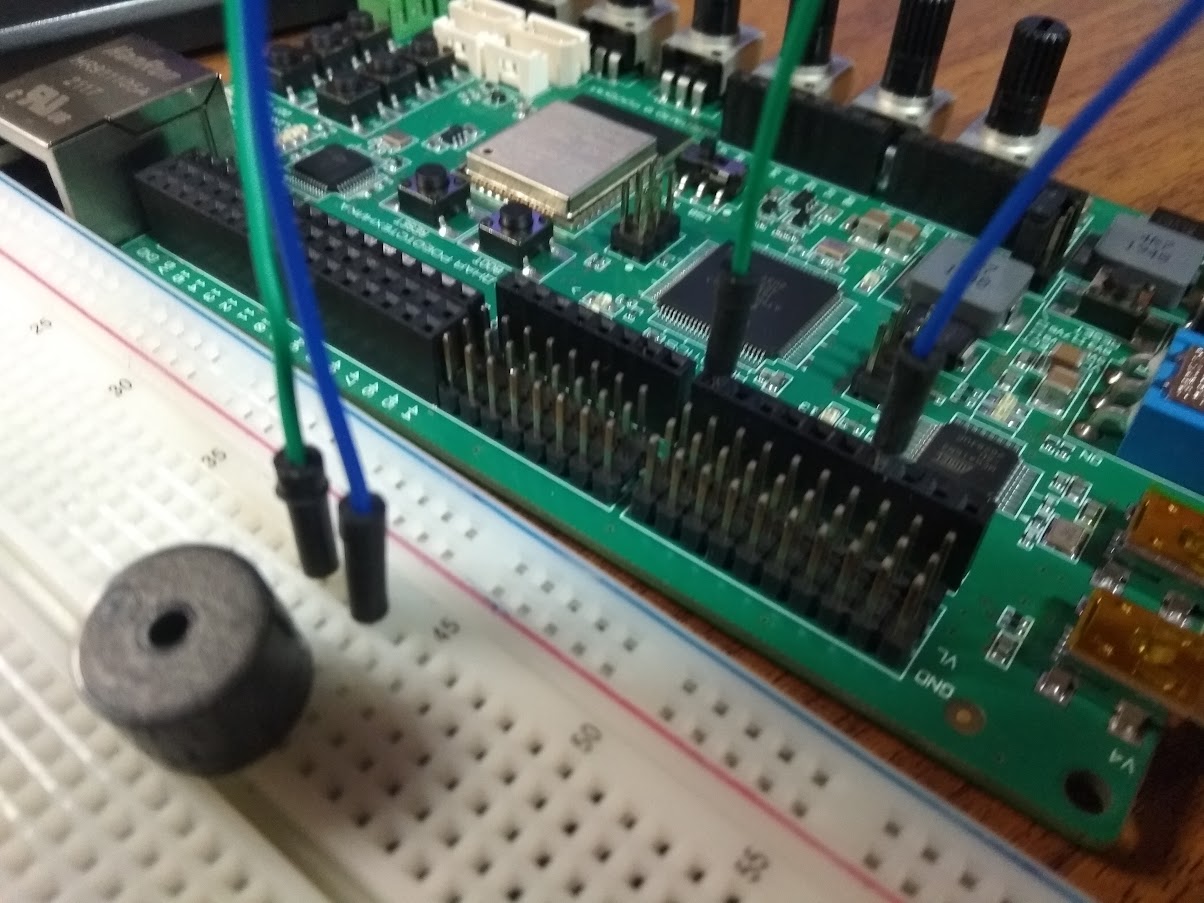
Сборка элементов на плате

Пояснение кода:
int p = 3; //объявляем переменную с номером пина, на который мы
//подключили пьезоэлемент
void setup() //процедура setup
{
pinMode(p, OUTPUT); //объявляем пин как выход
}
void loop() //процедура loop
{
tone (p, 500); //включаем на 500 Гц
delay(100); //ждем 100 мс
tone(p, 1000); //включаем на 1000 Гц
delay(100); //ждем 100 мс
}
Код программы:
int p = 3;
void setup()
{
pinMode(p, OUTPUT);
}
void loop() //процедура loop
{
tone (p, 500);
delay(100);
tone(p, 1000);
delay(100);
}
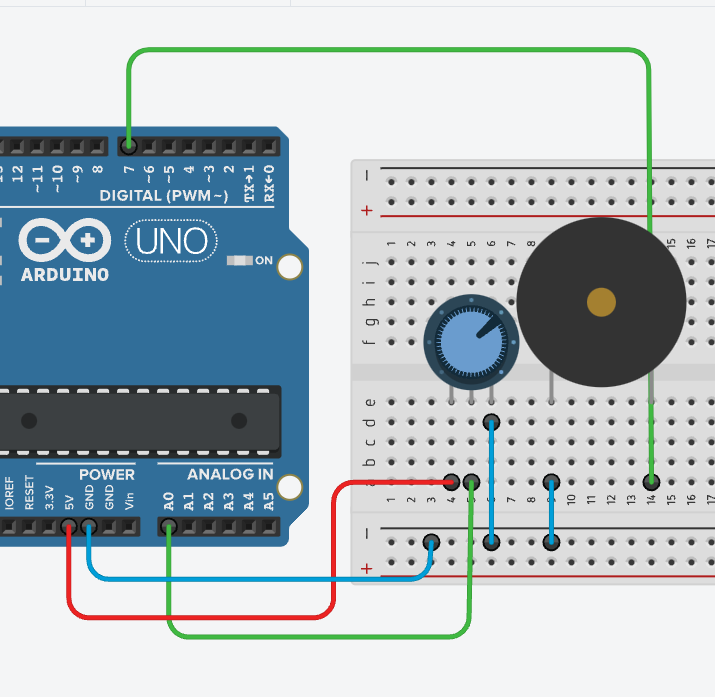
Лабораторная работа № 4.2 Управляемый пьезодинамик
Цель: Получение звука переменной частоты с помощью потенциометра.
|
|
int buzzer_pin = 3;
int pot_pin = A0;
void setup()
{
pinMode(buzzer_pin, OUTPUT);
}
void loop() //процедура loop
{
int rotation, frequency;
rotation = analogRead(pot_pin);
frequency = map(rotation,0,1023,3500,4500);
tone (buzzer_pin, frequency,20);
}
Сборка элементов на плате
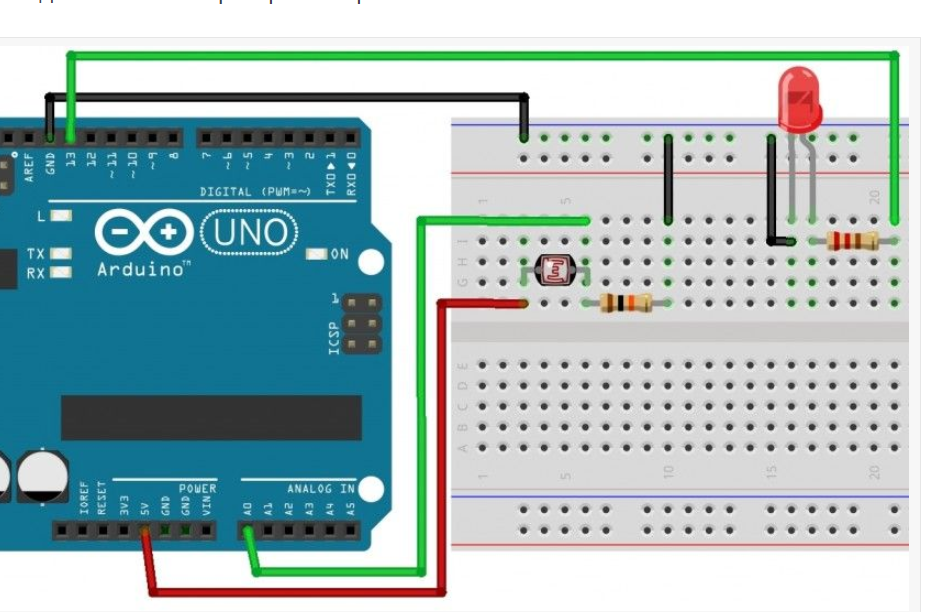
Лабораторная работа № 5 Фоторезистор
Цель: Знакомство работой фоторезистора
Фоторезистор — резистор, сопротивление которого зависит от яркости света, падающего на него. Фоторезисторы используются в робототехнике как датчики освещенности. Встроенный в робота фоторезистор позволяет определять степень освещенности, определять белые или черные участки на поверхности и в соответствие с этим двигаться по линии или совершать другие действия.
Оборудование: 6 проводов “папа-папа”, фоторезистор, светодиод, резистор на 220 Ом, резистор на 10 кОм
Схема подключения:
Код программы:
int led = 13; //переменная с номером пина светодиода
int ldr = 0; //и фоторезистора
void setup() //процедура setup
{
pinMode(led, OUTPUT); //указываем, что светодиод — выход
}
void loop() //процедура loop
{
if (analogRead(ldr)
//если показатель освещенности меньше 800, включаем светодиод
else digitalWrite(led, LOW); //иначе выключаем
}
Источник:
Arduino для начинающих. Урок 7. Подключение фоторезистора | Занимательная робототехника (edurobots.ru)
Сборка элементов на плате
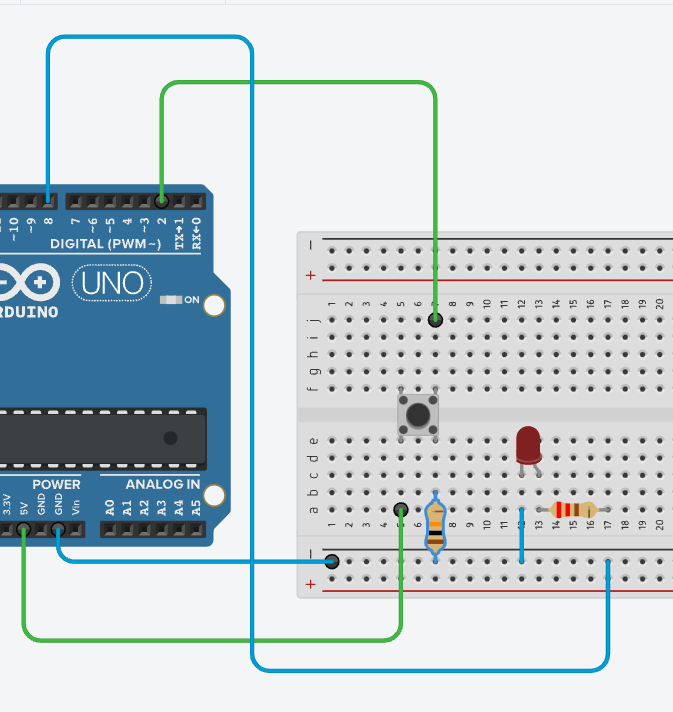
Лабораторная работа № 6 Кнопка
Цель: управление светодиодом с помощью кнопки
Сегодня подключаем к ардуино кнопку и светодиод (при нажатой кнопке светодиод будет гореть, при отжатой — не гореть)
Код:
int button = 2;
int led = 8;
void setup() {
pinMode(led, OUTPUT);
pinMode(button, INPUT);
}
void loop(){
if (digitalRead(button) == HIGH) {
digitalWrite(led, HIGH);
}
else {
digitalWrite(led, LOW);
}
}
Источник:
Arduino для начинающих. Урок 2. Подключение кнопки | Занимательная робототехника (edurobots.ru)
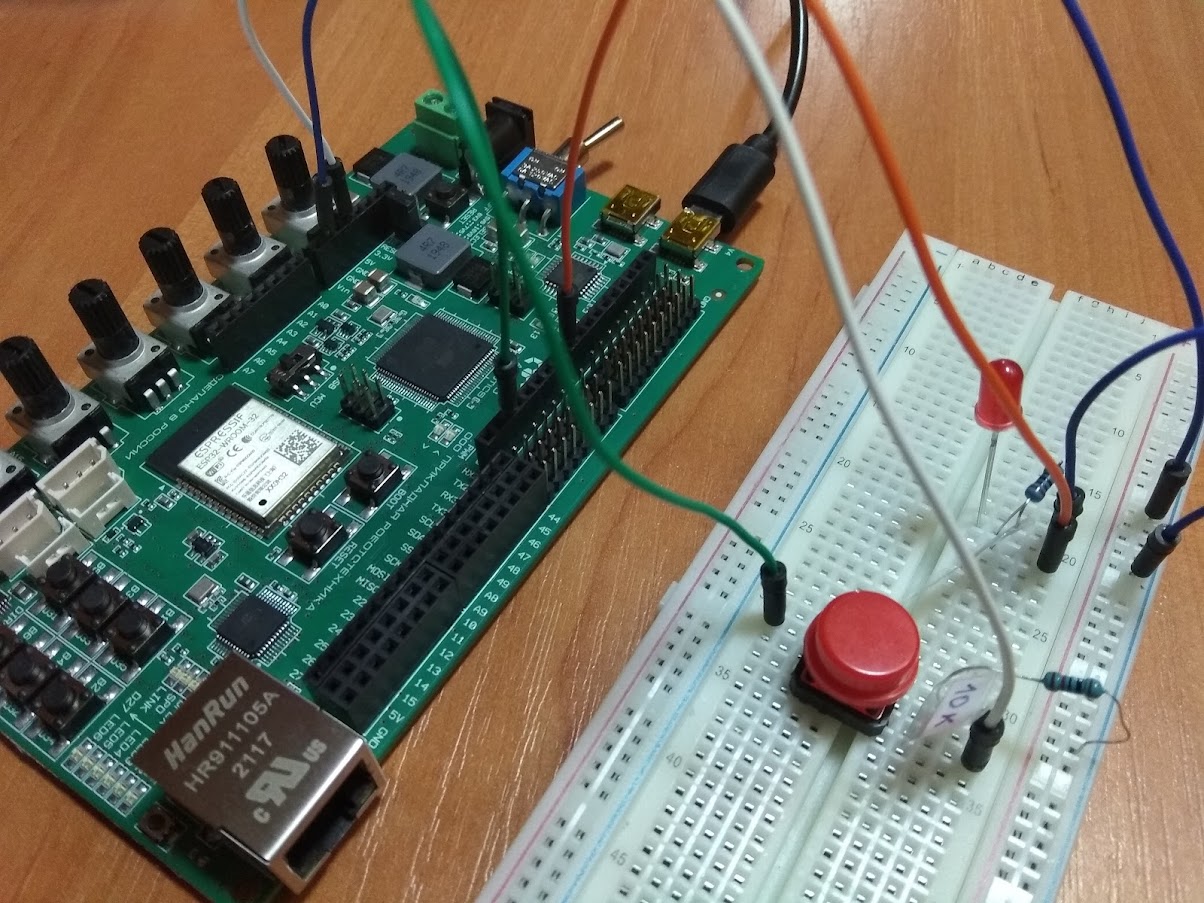
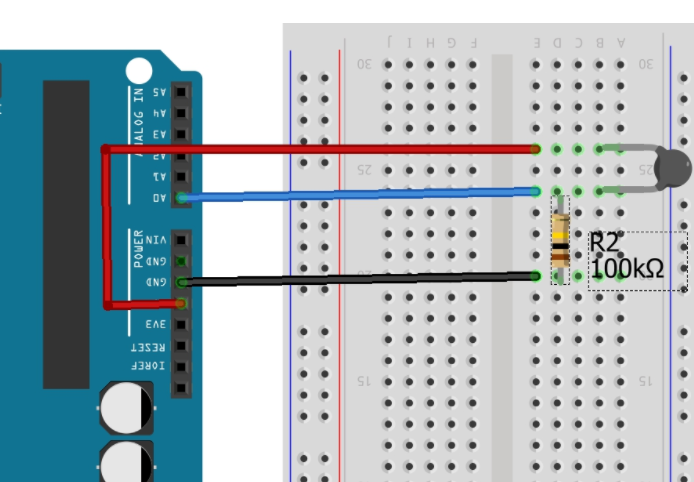
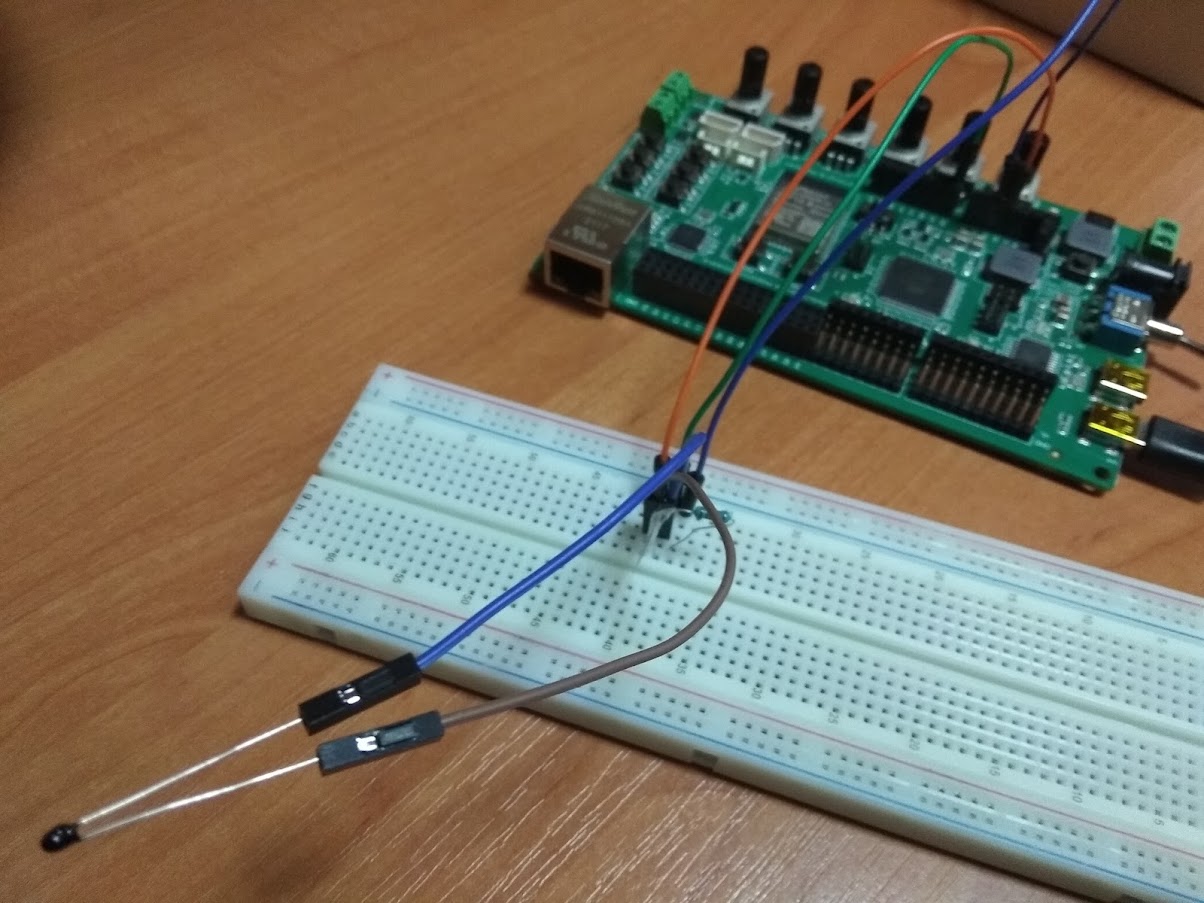
Лабораторная работа № 7 Термистор
Цель: Изучить работу термистора
Терморезистор (термистор) — полупроводниковый прибор, электрическое сопротивление которого изменяется в зависимости от его температуры.

10 КОм
Код:
#define B 3950 // B-коэффициент
#define SERIAL_R 10000 // сопротивление последовательного резистора, 10 кОм
#define THERMISTOR_R 10000 // номинальное сопротивления термистора, 100 кОм
#define NOMINAL_T 25 // номинальная температура (при которой TR = 100 кОм)
const byte tempPin = A0;
void setup() {
Serial.begin(9600);
pinMode( tempPin, INPUT );
}

Монитор порта
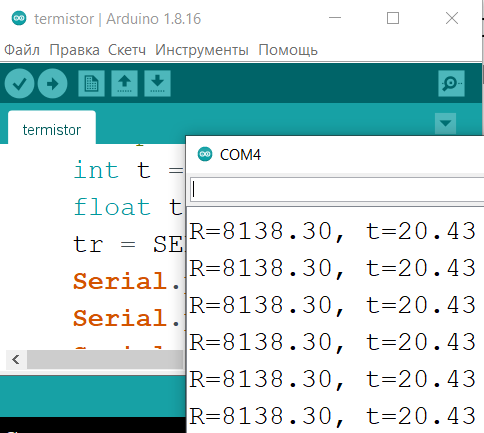
void loop() {
int t = analogRead( tempPin );
float tr = 1023.0 / t — 1;
tr = SERIAL_R / tr;
Serial.print(«R=»);
Serial.print(tr);
Serial.print(«, t=»);
float steinhart;
steinhart = tr / THERMISTOR_R;
steinhart = log(steinhart);
steinhart /= B;
steinhart -= 1.0 / (NOMINAL_T + 273.15);
steinhart = 1.0 / steinhart;
steinhart += 273.15;
Serial.println(abs(steinhart));

Подключение термистора к arduino. — У Павла! (psenyukov.ru)
delay(1000);
}
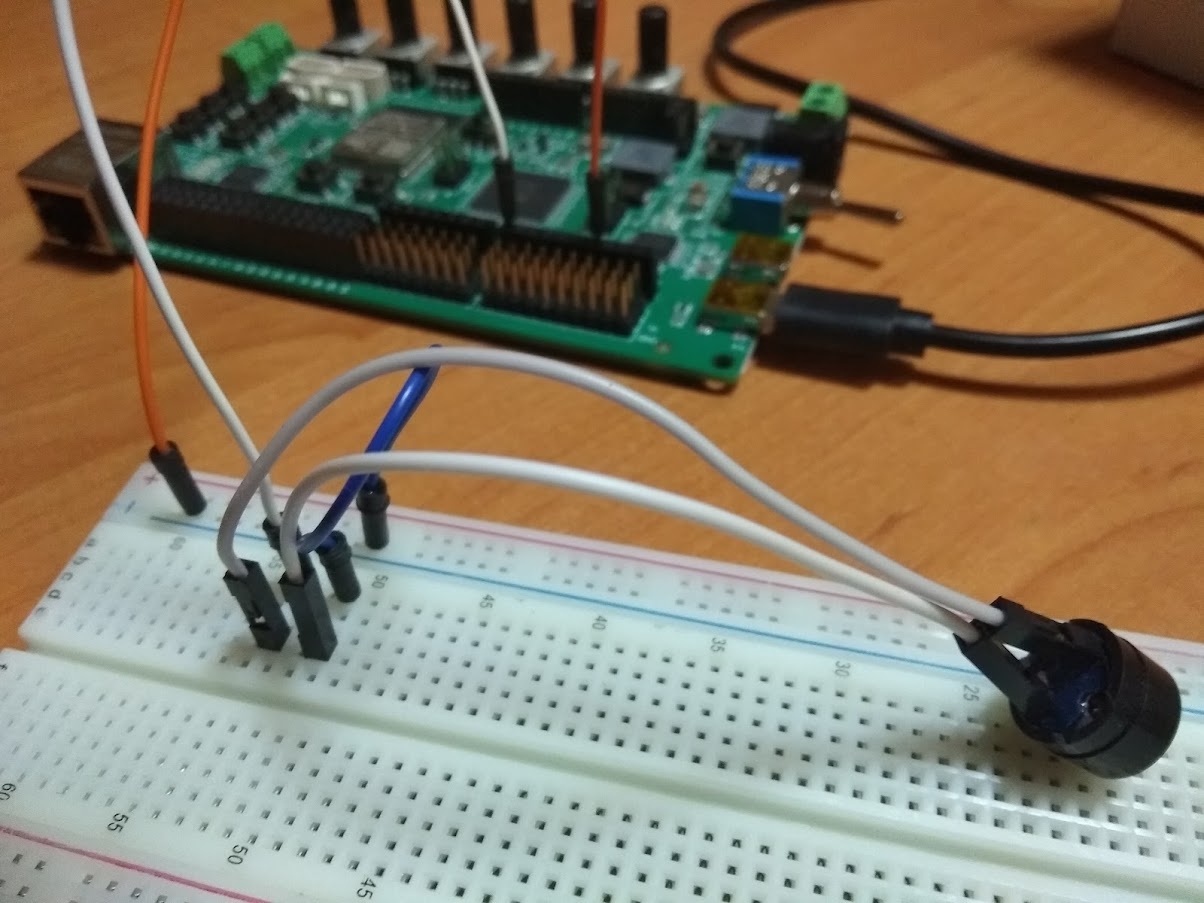
Лабораторная работа № 8 Синтезатор
Цель: получение звуков с помощью встроенных кнопок


Pin 8
GND
Код:
#define buz_pin 8
#define first_pin 30 // общее количество клавиш
#define button_count 3
void setup()
{
pinMode(buz_pin, OUTPUT);
}
void loop()
{
for (int i = 0; i
{
int buttonPin = i + first_pin;
boolean buttonUp = digitalRead(buttonPin);
if (!buttonUp) {
int frequency = 400 + i * 50;
tone(buz_pin,frequency, 50);
delay(500);
}
}
}
Лабораторная работа № 9 Взаимодействие Arduino с семисегментным индикатором
Цель: Знакомство с работой семисегментного индикатора
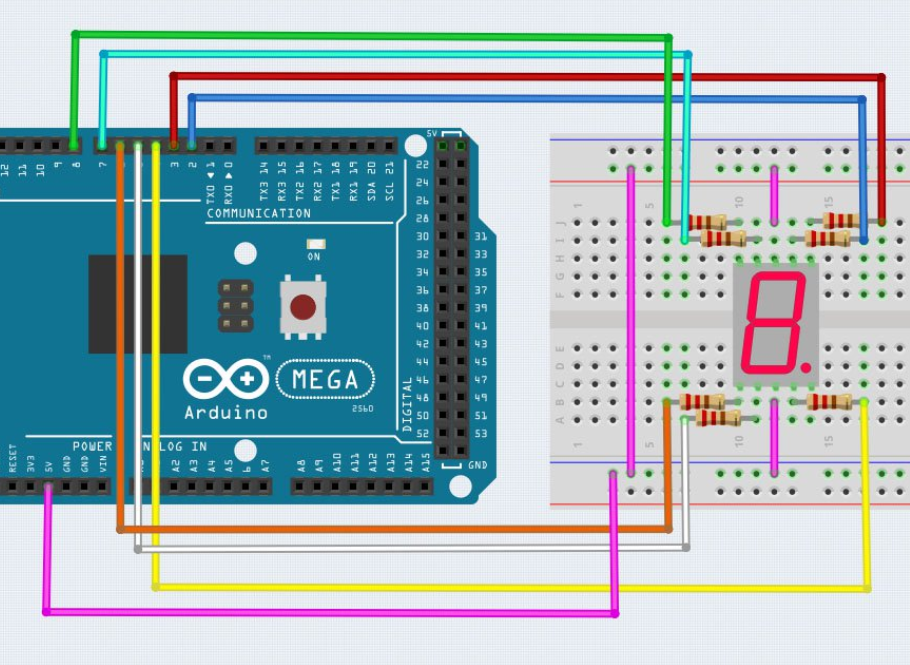
Код: Обратный отсчёт
/ создать массив для хранения конфигурации выводов индикатора для цифр
int num_array[10][7] = { { 1,1,1,1,1,1,0 }, // 0
{ 0,1,1,0,0,0,0 }, // 1
{ 1,1,0,1,1,0,1 }, // 2
{ 1,1,1,1,0,0,1 }, // 3
{ 0,1,1,0,0,1,1 }, // 4
{ 1,0,1,1,0,1,1 }, // 5
{ 1,0,1,1,1,1,1 }, // 6
{ 1,1,1,0,0,0,0 }, // 7
{ 1,1,1,1,1,1,1 }, // 8
{ 1,1,1,1,0,1,1 }}; // 9
// объявление функции
void Num_Write(int);
void setup()
{
// установить режимы работы выводов
pinMode(2, OUTPUT);
pinMode(3, OUTPUT);
pinMode(4, OUTPUT);
pinMode(5, OUTPUT);
pinMode(6, OUTPUT);
pinMode(7, OUTPUT);
pinMode(8, OUTPUT);
}
void loop()
{
// цикл счетчика
for (int counter = 10; counter 0; —counter)
{
delay(1000);
Num_Write(counter-1);
}
delay(3000);
}
// эта функция записывает значения в выводы, подключенные к индикатору
void Num_Write(int number)
{
int pin= 2;
for (int j=0; j 7; j++)
{
digitalWrite(pin, num_array[number][j]);
pin++;
}
}
Источник: Взаимодействие Arduino с семисегментным индикатором (radioprog.ru)
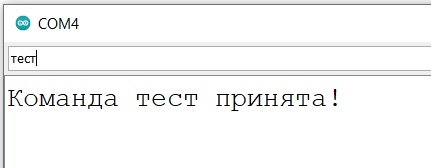
Лабораторная работа № 10 Обмен данными Arduino с ПК
Цель: Изучить механизм обмена данными между ПК и микроконтроллером
Микроконтроллер будет получать через последовательный порт некие команды и отправлять на ПК ответ, что та или иная команда принята.
Код:
void setup() {
// Инициализация последовательного порта с указанием скорости обмена данными ( по умолчанию лучше использовать 9600 бод)
Serial.begin(9600);
// Устанавливаем таймаут (значение по умолчанию слишком велико)
Serial.setTimeout(100);
}
void loop() {
// Если поступили данные с ПК
if (Serial.available() 0) {
// Считываем полученные данные
String command = Serial.readString();
// Формируем ответ
String response = «Command » + command + » is accepted!»;
// Отправляем ответ ПК
Serial.println(response);
}
}
Источники:
Обмен данными между ПК и Arduino через последовательный порт (с примером на C#) | Стрелец Coder (streletzcoder.ru)
Arduino: Serial Monitor. Общаемся с компьютером (alexanderklimov.ru)
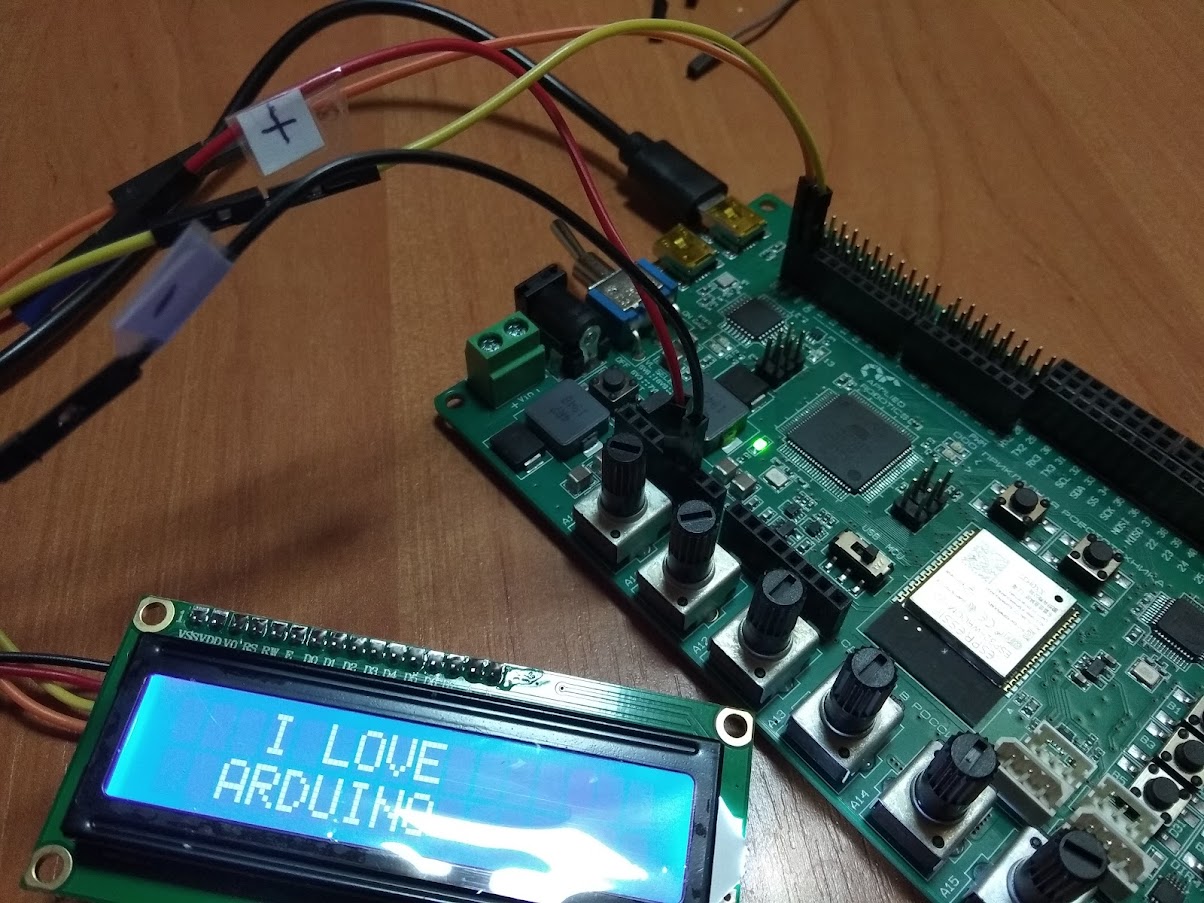
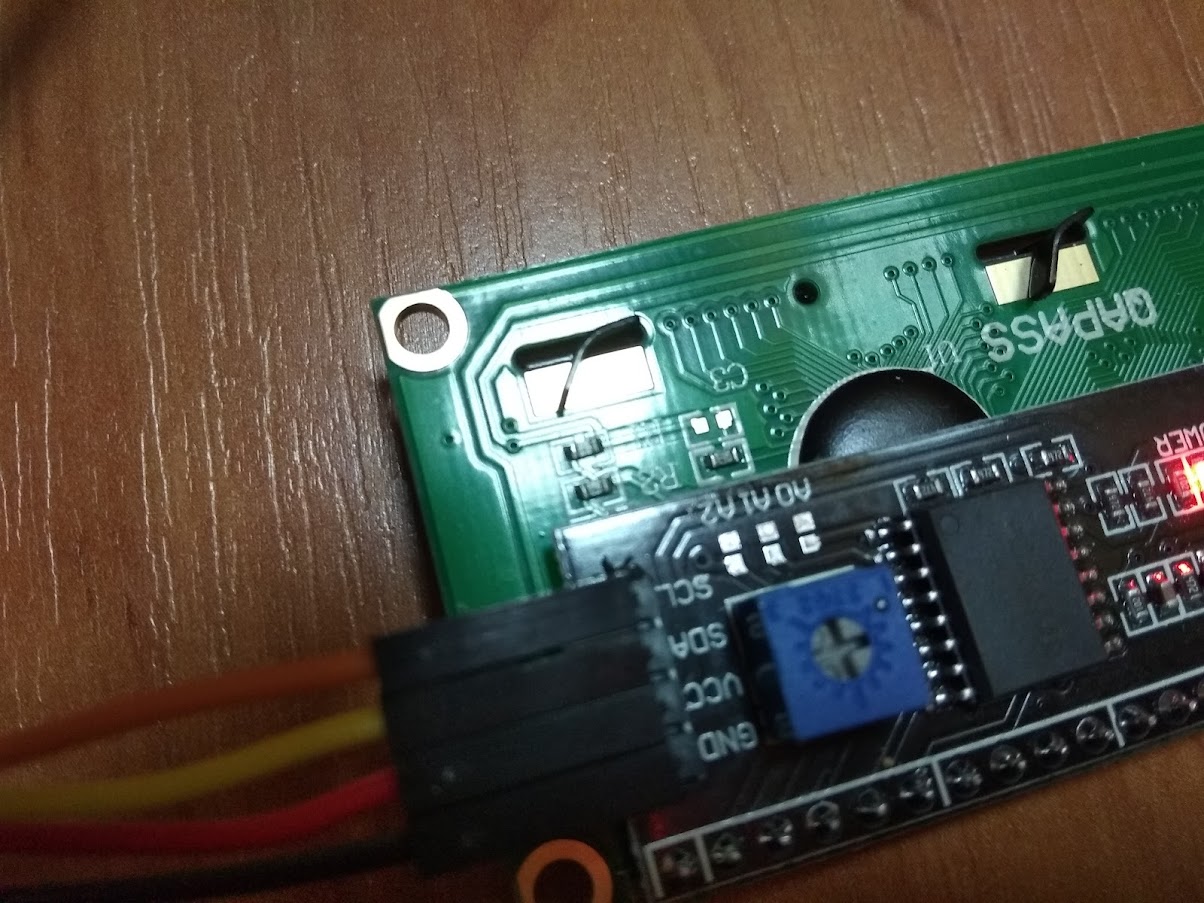
Лабораторная работа № 11 Дисплей LCD 12С интерфейс
Цель: Знакомство работой дисплея
Контакты — цвет проводов
GND – чёрный
5V — красный
SCL — оранжевый
SDA — жёлтый
Для работы понадобится библиотека LiquidCrystal_I2C. Нужно скачать (
https://iarduino.ru/file/134.html
) и распаковать содержимое архива в папку Arduinolibraries.
|
|
|
|
|
|
Код:
#include // библиотека для управления устройствами по I2C
#include // подключаем библиотеку
LiquidCrystal_I2C LCD(0x27,16,2); // присваиваем имя LCD для дисплея
void setup() {
LCD.init(); // инициализация LCD дисплея
LCD.backlight(); // включение подсветки дисплея
LCD.setCursor(3, 0); // ставим курсор на 1 символ первой строки
LCD.print(«I LOVE»); // печатаем сообщение на первой строке
LCD.setCursor(2, 1); // ставим курсор на 1 символ второй строки
LCD.print(«ARDUINO»); // печатаем сообщение на второй строке

Изменить работу программы так, чтобы она работала как
1)секундомер 2) калькулятор (считывает данные с клавиатуры и выводит на дисплей)
}
void loop() {
}
Источник:
Arduino подключение LCD 1602 I2C (xn--18-6kcdusowgbt1a4b.xn--p1ai)
Лабораторная работа № 12 Сервопривод
Цель: знакомство с работой сервопривода
Сервопривод — это мотор, положением вала которого мы можем управлять. От обычного мотора он отличается тем, что ему можно точно в градусах задать положение, в которое встанет вал. Сервоприводы используются для моделирования различных механических движений роботов.
Оборудование: сервопривод PDI-6221MG, блок питания
Подключить сервопривод к пину № 9 с помощью трехжильного шлейфа
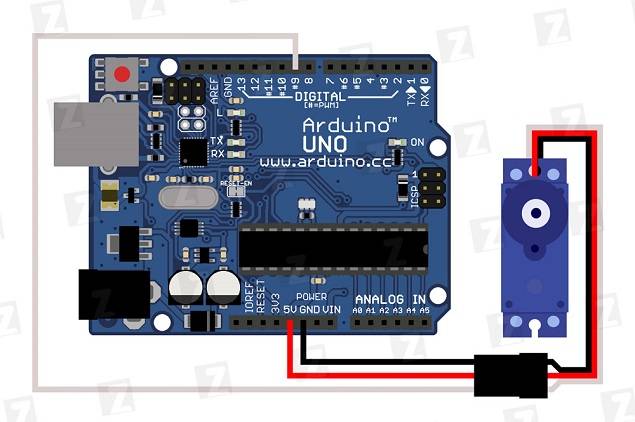
Arduino Mega позволяет подключить до 48 сервоприводов.
Код:
#include //используем библиотеку для работы с сервоприводом
Servo servo; //объявляем переменную servo типа Servo
void setup() //процедура setup
{
servo.attach(9); //привязываем привод к порту 10
}
void loop() //процедура loop
{
servo.write(0); //ставим вал под 0
delay(2000); //ждем 2 секунды
servo.write(180); //ставим вал под 180
delay(2000); //ждем 2 секунды
}
Если возникает шум в работе, измените углы от 10 до 170 градусов
Источник:
-
Arduino для начинающих. Урок 4. Управление сервоприводом | Занимательная робототехника (edurobots.ru)
-
Что такое сервопривод (сервомотор) и как им управлять — Суперайс (supereyes.ru)
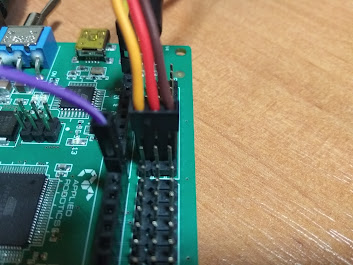
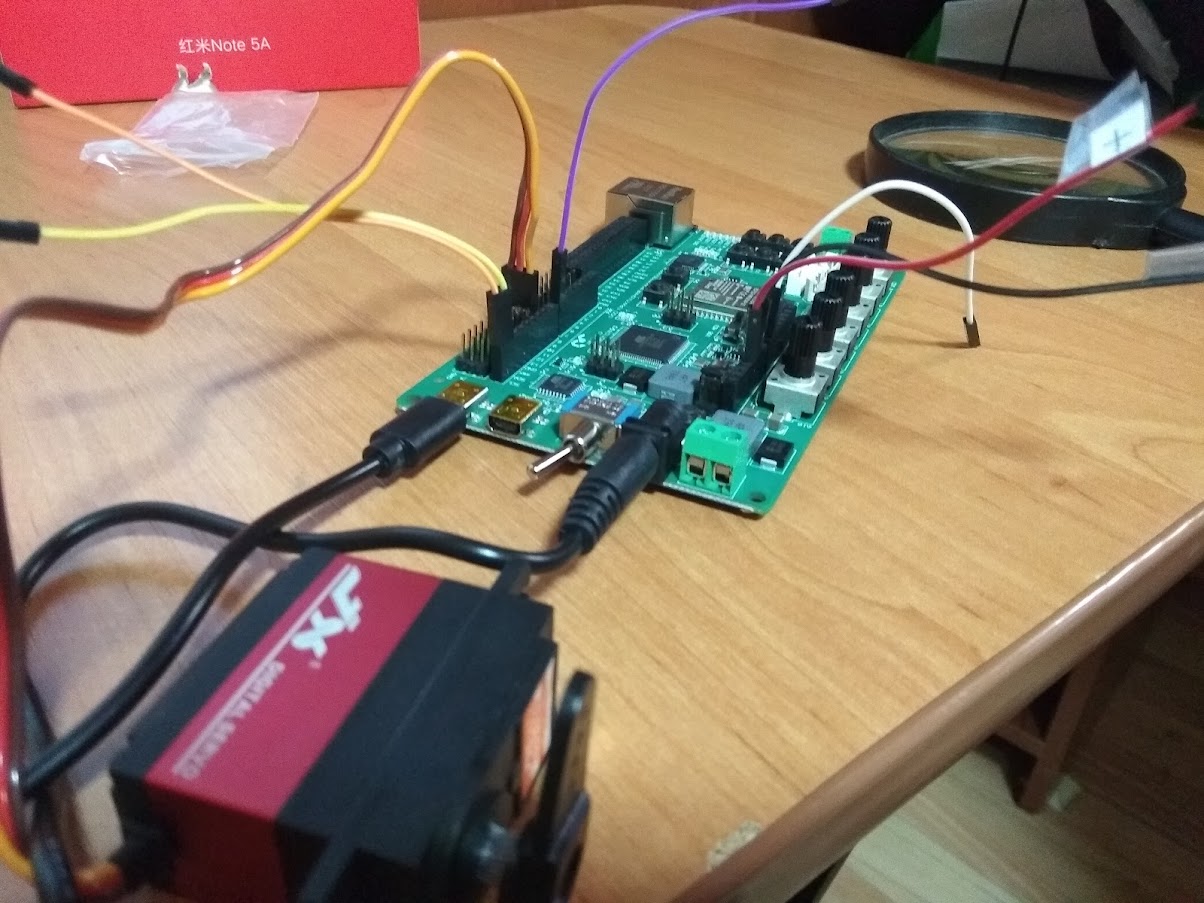
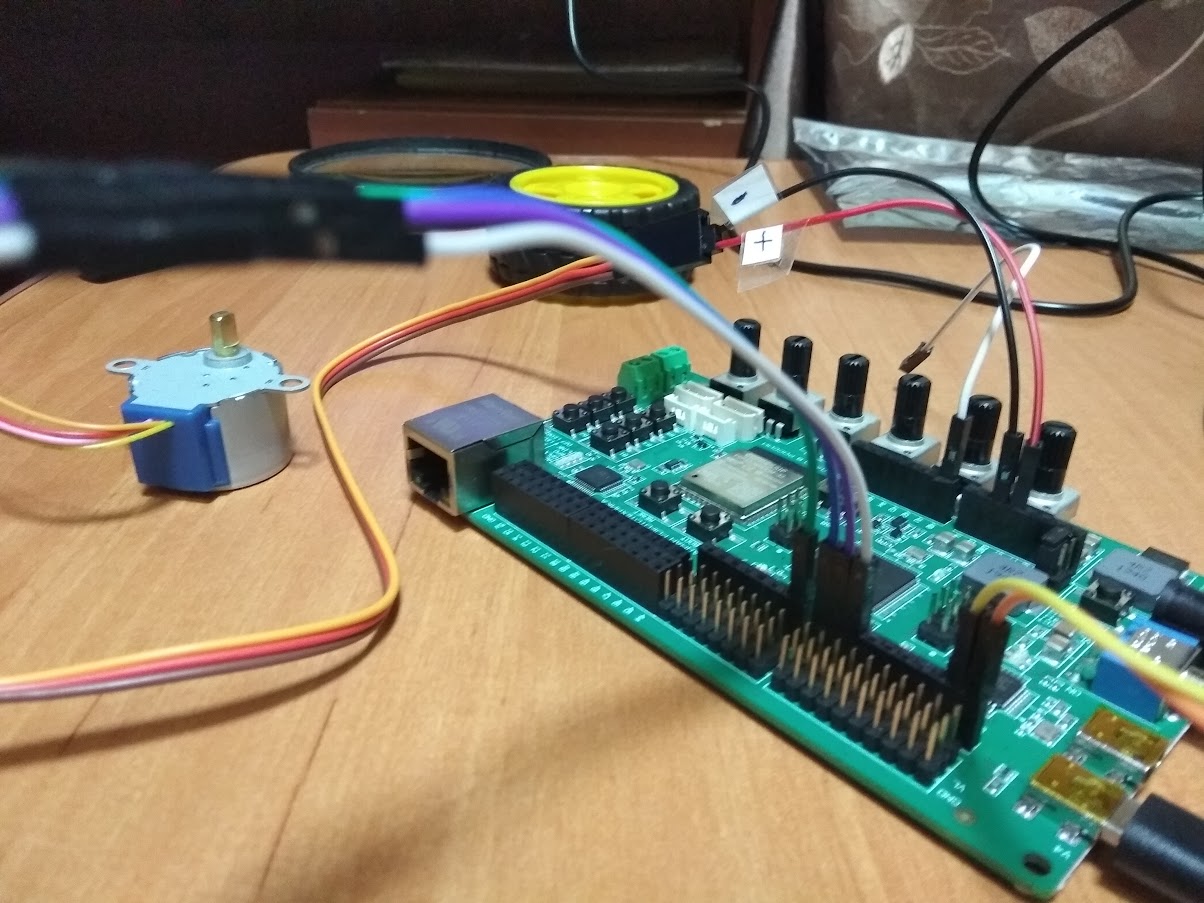
Лабораторная работа № 13 Шаговый двигатель
Цель: знакомство с работой шагового двигателя
Шаговый двигатель (stepper motor) предназначен для точного позиционирования или перемещения объекта на заданное количество шагов вала.
Оборудование: Шаговый двигатель, драйвер, провода
|
|
|
|
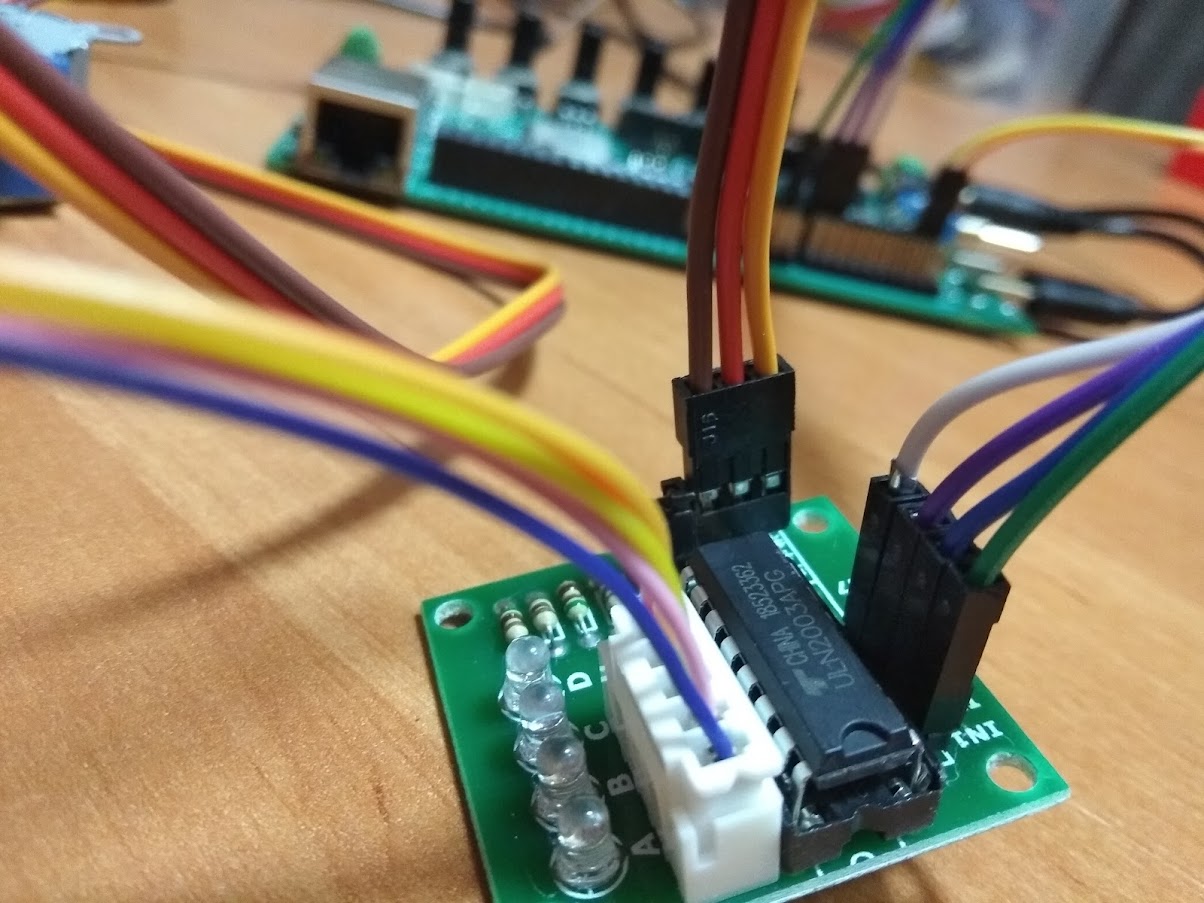
Код:
// порты для подключения модуля ULN2003 к Arduino
#define in1 7
#define in2 8
#define in3 9
#define in4 10
int dl = 5; // время задержки между импульсами
void setup() {
pinMode(in1, OUTPUT);
pinMode(in2, OUTPUT);
pinMode(in3, OUTPUT);
pinMode(in4, OUTPUT);
}
void loop() {
digitalWrite(in1, HIGH);
digitalWrite(in2, LOW);
digitalWrite(in3, LOW);
digitalWrite(in4, HIGH);
delay(dl);
digitalWrite(in1, HIGH);
digitalWrite(in2, HIGH);
digitalWrite(in3, LOW);
digitalWrite(in4, LOW);
delay(dl);
digitalWrite(in1, LOW);
digitalWrite(in2, HIGH);
digitalWrite(in3, HIGH);
digitalWrite(in4, LOW);
delay(dl);
digitalWrite(in1, LOW);
digitalWrite(in2, LOW);
digitalWrite(in3, HIGH);
digitalWrite(in4, HIGH);
delay(dl);
}
Источник:
Arduino шаговый двигатель 28byj-48 (stepper motor) » Ардуино Уроки (xn--18-6kcdusowgbt1a4b.xn--p1ai)
Лабораторная работа № 13 Двигатель постоянного тока
Цель: знакомство с двигателем постоянного тока
Двигатели постоянного работают при большой мощности тока, поэтому для них используется встроенный в микроконтроллер плата расширения – драйвер
Оборудование: DC-мотор (2 шт), источник питания
Прижать в гнёзда зеленого цвета с помощью маленькой отвертки провода двигателя
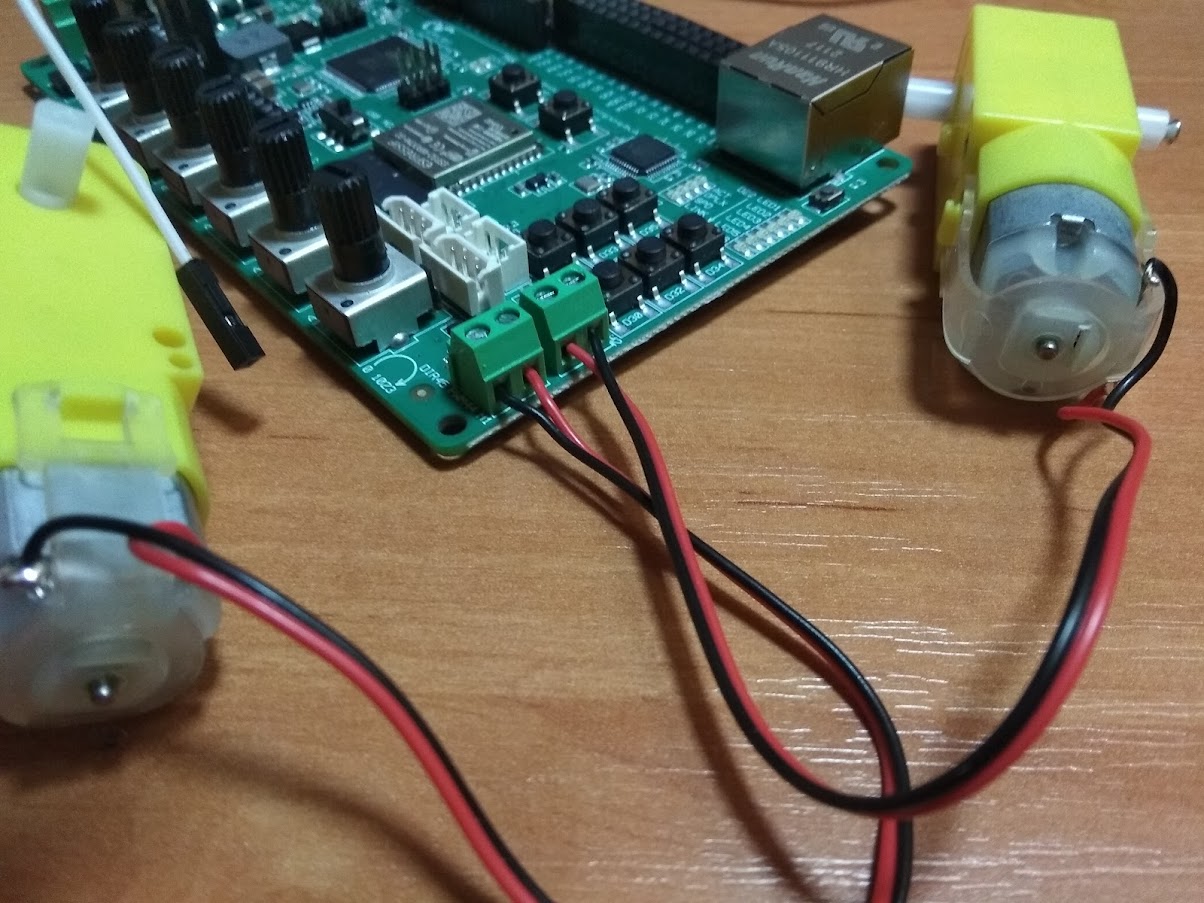
После запуска программы двигатели будут вращаться в одну потом в другую сторону
Код:
#define M1_dir 45 //направление вращения 1 двигателя
#define M1_Speed 44 //скорость вращения 1 двигателя
#define M2_dir 47 //направление вращения 2 двигателя
#define M2_Speed 46 //скорость вращения 2 двигателя
void setup() {
pinMode(M1_dir, OUTPUT);
pinMode(M1_Speed, OUTPUT);
pinMode(M2_dir, OUTPUT);
pinMode(M2_Speed, OUTPUT);
}
void loop() {
digitalWrite(M1_dir, LOW);
analogWrite(M1_Speed, 150);
digitalWrite(M2_dir, LOW);
analogWrite(M2_Speed, 150);
delay(2000);
digitalWrite(M1_dir, HIGH);
analogWrite(M1_Speed, 150);
digitalWrite(M2_dir, HIGH);
analogWrite(M2_Speed, 150);
delay(2000);
analogWrite(M1_Speed, 0);
analogWrite(M2_Speed, 0);
}
Лабораторная работа № 14 ИК-датчик и ИК пульт
Цель: знакомство с работой ИК-датчика и пульта
Инфракрасный пульт дистанционного управления — один из самых простых способов взаимодействия с электронными приборами. Так, практически в каждом доме есть несколько таких устройств: телевизор, музыкальный центр, видеоплеер, кондиционер. Но самое интересное применение инфракрасного пульта — дистанционное правление роботом.
Скачать и установить библиотеку IRremote
Красный провод — +5V
Оранжевый – GND (земля или минус)
Черный – пин 2
ИК датчик может принимать сигналы и из обычного пульта от телевизора
С помощью программы будем принимать команды с пульта и выводить их в окно монитора.
Код:
#include «IRremote.h»
IRrecv irrecv(2); // указываем вывод, к которому подключен приемник
decode_results results;
void setup() {
Serial.begin(9600); // выставляем скорость COM порта
irrecv.enableIRIn(); // запускаем прием
}
void loop() {
if ( irrecv.decode( &results )) { // если данные пришли
Serial.println( results.value, HEX ); // печатаем данные
irrecv.resume(); // принимаем следующую команду
}
}
Управление яркостью светодиода (пин 13) с помощью ИК- пульта
Из предыдущей программы определяем коды громкости пульта
20DF40BF и 20DFC03F
#include «IRremote.h»
IRrecv irrecv(2); // указываем вывод, к которому подключен приемник
decode_results results;
void setup() {
irrecv.enableIRIn(); // запускаем прием
}
void loop() {
if ( irrecv.decode( &results )) { // если данные пришли
switch ( results.value ) {
case 0x20DF40BF:
digitalWrite( 13, HIGH );
break;
case 0x20DFC03F:
digitalWrite( 13, LOW );
break;
}
irrecv.resume(); // принимаем следующую команду
}
Источник:
Ардуино: инфракрасный пульт и приемник | Класс робототехники (robotclass.ru)
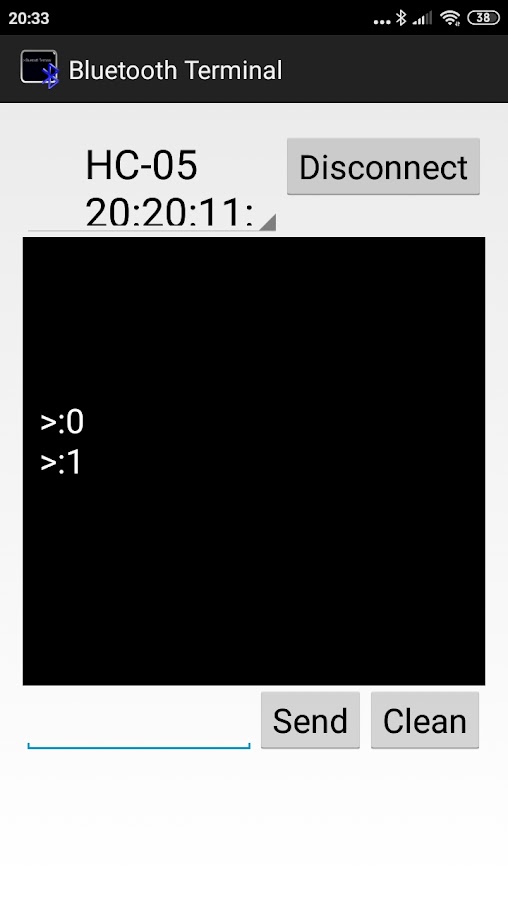
Лабораторная работа № 15 Bluetooth модуль
Цель: знакомство с работой Bluetooth модуля
Bluetooth модуль HC-05 используется для дистанционного управления ардуино или передачи данных с телефонов и гаджетов на микроконтроллер.
Нужно установить на телефон (Android) приложение Bluetooth терминал
Оборудование: Bluetooth модуль HC-05, источник питания, провода папа-мама 4 шт
При загрузке скэтча нужно отключить от питания Bluetooth модуль
Подключение контактов:
|
Arduino |
Bluetooth |
|
Pin 1 (TX) |
RXD |
|
Pin 0 (RX) |
TXD |
|
GND |
GND |
|
5V |
VCC |
Напишем программу, которая будет с телефона управлять светодиодом (пин 13)
Код:
int val;
 int LED = 13;
int LED = 13;
void setup()
{
Serial.begin(9600);
pinMode(LED, OUTPUT);
digitalWrite(LED, HIGH);
}
void loop()
{
if (Serial.available())
{
val = Serial.read();
// При символе «1» включаем светодиод
if (val == ‘1’)
{
digitalWrite(LED, HIGH);
}
// При символе «0» выключаем светодиод
if ( val == ‘0’)
{
digitalWrite(LED, LOW);
}
}
}
Подключение терминала:
-
Включаем Bluetooth на телефоне и ищем новые устройства
-
Находим в списке расстройств «HC-05» и подключаемся к нему.
-
Телефон спросит пин-код. необходимо ввести «1234» или «0000»
-
Запустить терминал
Источник:
Урок 15. Bluetooth модуль HC-06 подключение к Arduino. Управление устройствами с телефона. — Описания, примеры, подключение к Arduino (iarduino.ru)
Лабораторная работа № 16 Дальномер
Цель: знакомство с работой дальномера (датчик расстояния)
Ультразвуковой дальномер рассчитан на определение расстояния до объектов в радиусе четырёх метров.
Работа модуля основана на принципе эхолокации. Модуль посылает ультразвуковой сигнал и принимает его отражение от объекта. Измерив время между отправкой и получением импульса, не сложно вычислить расстояние до препятствия.
Оборудование: Дальномер, провода папа-мама 4 шт
Подключение контактов:
|
Arduino |
Дальномер |
|
Pin 11 |
ECHO |
|
Pin 10 |
TRIG |
|
GND |
GND |
|
5V |
VCC |
Нужно установить библиотеку NewPing.h
Программа выводит на монитор расстояние до объектов в см
Код:
#include
#define TRIGGER_PIN 10
#define ECHO_PIN 11
#define MAX_DISTANCE 400
NewPing sonar(TRIGGER_PIN, ECHO_PIN, MAX_DISTANCE);
void setup() {
Serial.begin(9600);
}
void loop() {
delay(500);
Serial.print(«Ping: «);
Serial.print(sonar.ping_cm());
Serial.println(«cm»);
}

Источник:
Ультразвуковой дальномер HC-SR04: подключение, схема и примеры работы [Амперка / Вики] (amperka.ru)
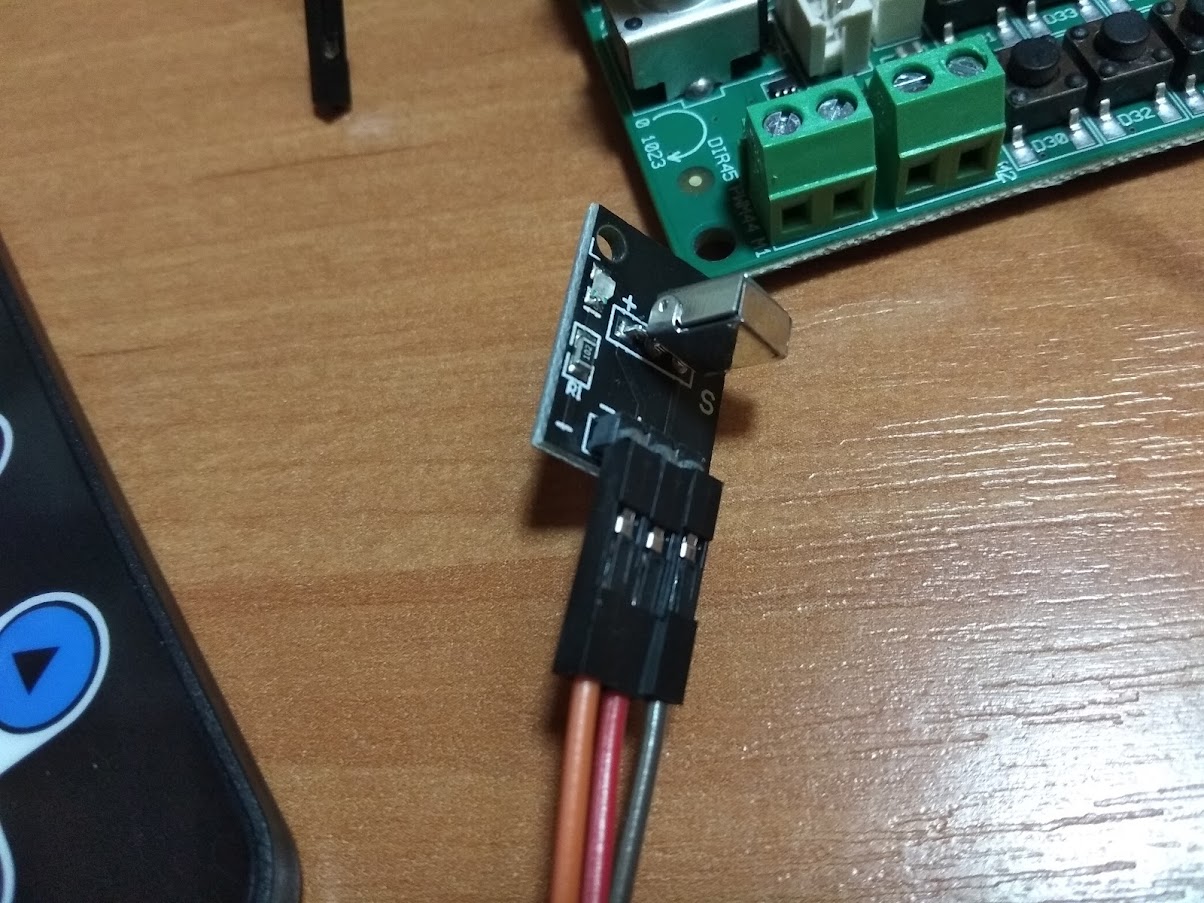
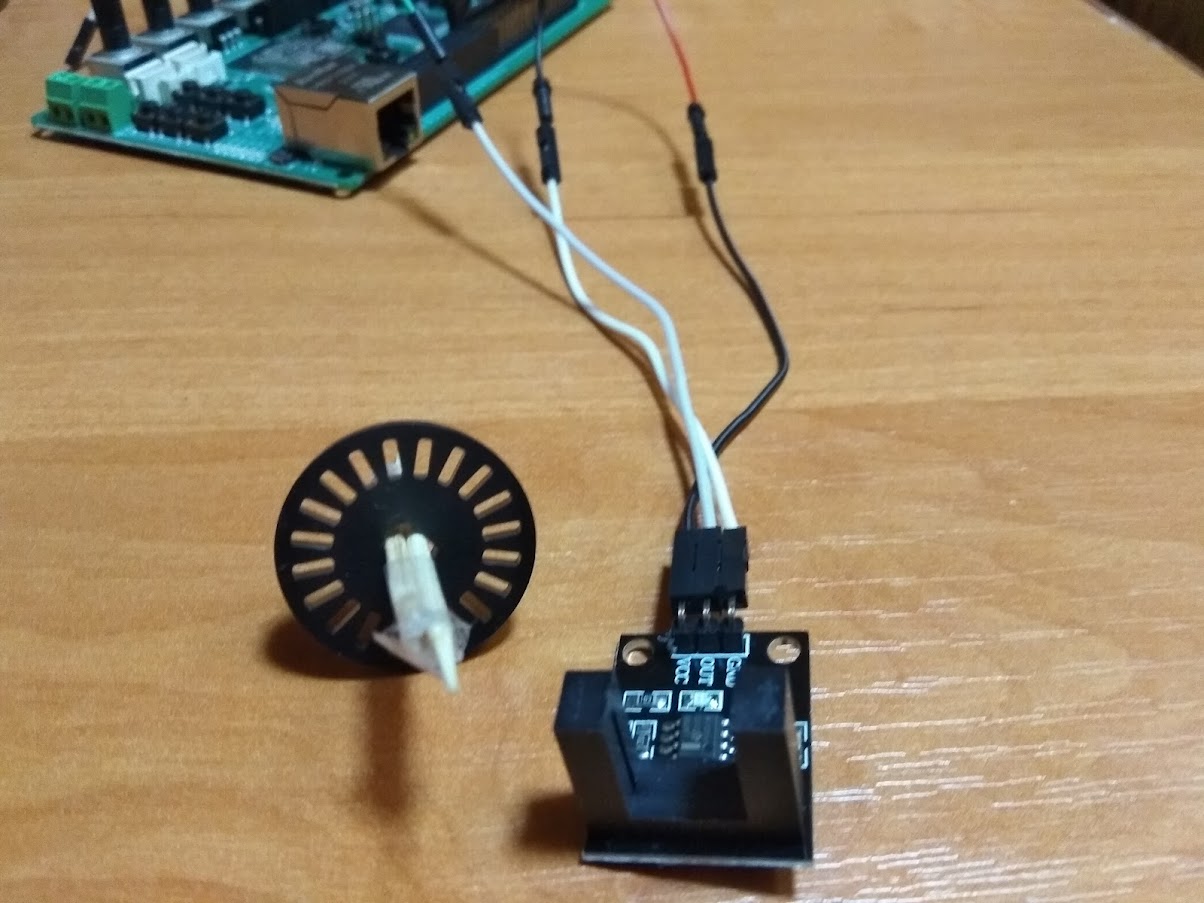
Лабораторная работа № 17 Датчик скорости
Цель: знакомство с работой датчика скорости
Модуль датчика оборотов двигателя предназначен главным образом для определения скорости вращения вала электродвигателя.
Как правило, датчики измеряют величину благодаря регистрации определённых событий, затем количество событий соотносится с периодом времени, за которые они произошли.
Так в данном случае измеряется скорость – под событиями здесь понимаются импульсы, полученные в результате срабатывания оптического датчика во время вращения диска с прорезями. Датчик состоит из светодиода и фототранзистора, который воспринимает наличие или отсутствие излучения светодиода.
Подключение контактов:
|
Arduino |
Датчик |
|
GND |
GND |
|
2 |
OUT |
|
5V |
VCC |
Код:
int encoder_pin = 2; // импульсные сигналы от модуля
unsigned int rpm; // количество оборотов в минуту
volatile byte pulses; // количество импульсов
unsigned long timeold;
// количество импульсов на оборот
unsigned int pulsesperturn = 12;
void counter()
{
//обновление счета импульсов
pulses++;
}
void setup()
{
Serial.begin(9600);
pinMode(encoder_pin, INPUT);
//Прерывание 0 на цифровой линии 2
//Срабатывание триггера по спаду сигнала
attachInterrupt(0, counter, FALLING);
// Инициализация
pulses = 0;
rpm = 0;
timeold = 0;
}
void loop()
{
if (millis() — timeold = 1000) {
//Не обрабатывать прерывания во время счёта
detachInterrupt(0);
rpm = (60 * 1000 / pulsesperturn )/ (millis() — timeold)* pulses;
timeold = millis();
pulses = 0;
Serial.print(«RPM = «);
Serial.println(rpm,DEC);
//Перезагрузка процесса обработки прерываний
attachInterrupt(0, counter, FALLING);
}
}
Источник:
Arduino и модуль фотоимпульсного датчика скорости вращения двигателя » Digitrode.ru
Приложения
Звездные войны
|
Подключите к плате Пьезоэлемент (пьезопищалка) Звук воспроизводится функцией tone() Синтаксис tone(pin, frequency, duration) Параметры pin: номер порта вход/выхода, на котором будет генерироваться сигнал frequency: частота сигнала в Герцах duration: длительность сигнала в миллисекундах Чтобы остановить звук, используют функцию noTone(pin) Напишем скетч, который сыграет мелодию из фильма «Звездные войны». // Звездные войны int led = 8; void setup() { pinMode(led, OUTPUT); } void loop() { delay(2000); tone(led,392,200); delay(400); tone(led,392,200); delay(400); tone(led,392,300); delay(400); tone(led,311,200); delay(250); tone(led,466,200); delay(100); tone(led,392,200); delay(350); tone(led,311,200); delay(250); tone(led,466,200); delay(100); tone(led,392,200); delay(700); tone(led,587,200); delay(350); tone(led,587,200); delay(350); tone(led,587,200); delay(350); tone(led,622,200); delay(250); tone(led,466,200); delay(100); tone(led,369,200); delay(350); tone(led,311,200); delay(250); tone(led,466,200); delay(100); tone(led,392,200); delay(200); noTone(led); } |
Применение циклов
byte led_R; // случайный бит
const int Pin_tone = 8; // номер порта зуммера
const byte COUNT_NOTES = 39; // Количество нот
int frequences[COUNT_NOTES] = {
392, 392, 392, 311, 466, 392, 311, 466, 392,
587, 587, 587, 622, 466, 369, 311, 466, 392,
784, 392, 392, 784, 739, 698, 659, 622, 659,
415, 554, 523, 493, 466, 440, 466,
311, 369, 311, 466, 392
};
int durations[COUNT_NOTES] = {
350, 350, 350, 250, 100, 350, 250, 100, 700,
350, 350, 350, 250, 100, 350, 250, 100, 700,
350, 250, 100, 350, 250, 100, 100, 100, 450,
150, 350, 250, 100, 100, 100, 450,
150, 350, 250, 100, 750
};
void setup() {
pinMode(13, OUTPUT); // Настраиваем контакт на выход
pinMode(Pin_tone, OUTPUT); // Настраиваем контакт на выход
}
void loop() {
for (int i = 0; i Цикл от 0 до количества нот
tone(Pin_tone, frequences[i], durations[i] * 2); // Включаем звук, определенной частоты
led_R = random(0, 254); // Генерируем случайное число от 0 до 254
analogWrite(13, led_R); // Зажигаем светодиод на случайно сгенерированную яркость
delay(durations[i] * 2); // Пауза для заданной ноты
noTone(Pin_tone); // Останавливаем звук
}
}
Источник:
Урок 14. Музыка Star Wars на Arduino и RGB цветомузыка? Работа с tone(); — Описания, примеры, подключение к Arduino (iarduino.ru)
Виртуальный тренажёр на сайте К. Полякова
Откройте веб-страницу http://kpolyakov.spb.ru/school/robotics/arduino/arduino.htm
Удалите программу из окна слева и скопируйте в это окно новую программу:
//Звездные войны
пока 1
{
звук(15,392)
ждать(200)
звук(15,392)
ждать(200)
звук(15,392)
ждать(200)
звук(15,311)
ждать(250)
звук(15,466)
ждать(100)
звук(15,392)
ждать(350)
звук(15,311)
ждать(250)
звук(15,466)
ждать(100)
звук(15,392)
ждать(700)
звук(15,587)
ждать(350)
звук(15,587)
ждать(350)
звук(15,587)
ждать(350)
звук(15,622)
ждать(250)
звук(15,466)
ждать(100)
звук(15,369)
ждать(350)
звук(15,311)
ждать(250)
звук(15,466)
ждать(100)
звук(15,392)
ждать(200)
нетЗвука(15)
ждать(2000)
}
Щёлкнув по кнопке запустить программу, выполните её
Скетч «Светофор» на тренажёре К. Полякова
//1 секунду: горит только красный светодиод;
//0,5 секунды: горят красный и жёлтый светодиоды;
//1 секунду: горит только зелёный светодиод;
//0,5 секунды: горит только жёлтый светодиод.
пока 1
{
пин[0] = HIGH
ждать(3000)
пин[1] = HIGH
ждать(2000)
пин[0] = LOW
пин[1] = LOW
пин[2] = HIGH
ждать(3000)
пин[2] = LOW
пин[1] = HIGH
ждать(2000)
пин[1] = LOW
}
Ресурсы:
-
https://appliedrobotics.ru/?page_id=670 — pdf версии методичек
-
https://youtu.be/PqqvmoaAzfU — Обзор модуля и интерфейса программы TrackingCam
-
http://arduino.ru/Guide/Windows — arduino справочник на русском
-
https://amperka.ru/page/arduino-ide — Arduino IDE Arduino IDE 1.8.16 (стабильная версия релиз от 06.09.2021)
-
https://kpolyakov.spb.ru/school/robotics/arduino.htm — Сайт К. Полякова. Раздел Робототехника
-
https://youtu.be/nrczO8tWJNg — Arduino с #0
-
https://youtu.be/bO_jN0Lpz3Q?list=PLfDmj22jP9S759DT250VVzfZs_4VnJqLa — Arduino с #0
-
http://edurobots.ru/kurs-arduino-dlya-nachinayushhix — Arduino уроки
-
https://wokwi.com/arduino/new?template=arduino-uno — виртуальный симулятор Arduino
-
https://www.tinkercad.com/things/e2gKm6XCRUK-brave-tumelo/editel?tenant=circuits — Тинкеркад (Tinkercad Circuits Arduino) – бесплатный, простой и одновременно мощный эмулятор Arduino
1 YXHUNU9GQUEQ – это код, который отправляет учащимся учителем. Учитель заранее на сайте регистрируется, выбрав роль преподавателя и создает класс, формирует код.
Образовательный комплект предназначен для изучения основ электроники, кибернетических и встраиваемых систем и практического применения полученных навыков в сфере робототехники и современных технологий.
Конструктор программируемых моделей инженерных систем предназначен для разработки программируемых моделей на основе многофункционального контроллера типа «Arduino», совместимого с периферийными устройствами и модулями расширения Arduino Mega2560, а также адаптированного для разработки мехатронных систем с большим числом приводов и решений в сфере «Интернет вещей».
В состав комплекта входит:
- Программируемый контроллер – 1 шт.
- Сервопривод большой – 4 шт.
- Сервопривод малый — 2 шт.
- Привод постоянного тока – 2 шт.
- Комплект колес с резиновым ободом – 2 шт.
- Шаговый двигатель с драйвером – 2 шт.
- Аккумулятор – 1 шт.
- Блок питания и зарядное устройство — 1 шт.
- Макетная плата и набор перемычек – 1 шт.
- Набор светодиодов — 1 шт.
- Набор резисторов — 1 шт.
- Пьезодинамик — 1 шт.
- Фоторезистор – 1 шт.
- Индикатор 7-сегментный – 1 шт.
- Дисплей – 1 шт.
- Термопара — 1 шт.
- Датчик УЗ-дальномер – 3 шт.
- Датчик ИК – 3 шт.
- Кнопка – 5 шт.
- Потенциометр – 3 шт.
В состав комплекта входит учебное пособие на не менее 15 различных лабораторных работ, а также набор библиотек для трехмерного моделирования и прототипирования конструкций учебных роботов.
Образовательный набор электронике, электромеханике и микропроцессорной технике «Конструктор программируемых моделей инженерных систем. Расширенный набор» предназначен для проведения учебных занятий по электронике и схемотехнике с целью изучения наиболее распространенной элементной базы, применяемой для инженерно-технического творчества учащихся и разработки учебных моделей роботов. Набор позволяет учащимся на практике освоить основные технологии проектирования робототехнических комплексов на примере учебных моделей роботов, а также изучить основные технические решения в области кибернетических и встраиваемых систем.
Данный образовательный комплект «Конструктор программируемых моделей инженерных систем. Расширенный» предназначен для разработки программируемых моделей на основе многофункционального контроллера типа «Arduino», совместимого с периферийными устройствами и модулями расширения Arduino Mega2560, а также адаптированного для разработки мехатронных систем с большим числом приводов, мобильных и манипуляционных роботов, оснащенных системой технического зрения.
В состав комплекта входит набор электронных компонентов для изучения основ электроники и схемотехники, комплект приводов и датчиков различного типа для разработки робототехнических комплексов, а так же модуль технического зрения для распознавания заранее заданных графических объектов.
В состав комплекта входит:
- Программируемый контроллер – 1 шт. Программируемый контроллер должен обладать портами для подключения цифровых и аналоговых устройств, интерфейсами TTL, USART, I2C, SPI, Ethernet, Bluetooth или WiFi.
- Одноплатный микрокомпьютер.
- Периферийная плата для разработки робототехнических комплексов.
- Программируемый контроллер со встроенным интерпретатором JavaScript
- Сервопривод большой – 4 шт.
- Сервопривод малый — 2 шт.
- Привод постоянного тока – 4 шт.
- Комплект колес с резиновым ободом – 2 шт.
- Шаговый двигатель с драйвером – 2 шт.
- Аккумулятор – 2 шт.
- Блок питания и зарядное устройство — 2 шт.
- Макетная плата и набор коммутационных проводов – 2 шт.
- Набор светодиодов — 2 шт.
- Набор резисторов — 2 шт.
- Пьезодинамик — 2 шт.
- Фоторезистор – 1 шт.
- Индикатор 7-сегментный – 1 шт.
- Дисплей – 3 шт.
- Термопара — 1 шт.
- Датчик УЗ-дальномер – 3 шт.
- Датчик ИК – 3 шт.
- Кнопка – 10 шт.
- Потенциометр – 3 шт.
- Модуль технического зрения – 1 шт.
- Универсальный контроллер для разработки IoT-систем – 1 шт.
- Модуль смарт-светодиода — 2 шт
- Модуль смарт-RGB светодиода
- Модуль смарт-кнопки — 2 шт
- Модуль смарт-датчика температуры и влажности — 2 шт
- Смарт-модуль двухканального управления моторами
- Модуль смарт- датчика освещения
- Модуль смарт – датчика давления
- Модуль смарт-датчика звука
- Комплект для сборки вакуумного захвата – 1 шт.
- Комплект для сборки «умного дома»
- Комплект конструктивных элементов для разработки мобильной платформы и манипулятора.
Входящие в состав набора модуль технического зрения и робототехнический контроллер позволяют осуществлять разработку моделей автономных робототехнических комплексов для решения соревновательных и практико-ориентированных задач.

Модуль технического зрения представляет собой вычислительное устройство со встроенным микропроцессором (кол-во ядер — не менее 4шт, частота ядра не менее 1.2 ГГц, объем ОЗУ — не менее 512Мб, объем встроенной памяти — не менее 8Гб), интегрированной камерой (максимальное разрешение видеопотока, передаваемого по интерфейсу USB — не менее 2592×1944 ед.) и оптической системой . Модуль технического зрения обладает совместимостью с различными программируемыми контроллерами с помощью интерфейсов — TTL, UART, I2C, SPI, Ethernet.
Модуль технического зрения обеспечивает выполнение всех измерений и вычислений посредством собственных вычислительных возможностей встроенного микропроцессора, а также возможность разработки и установки пользовательского программного обеспечения, использующего аппаратные вычислительные ресурсы микропроцессора, память, видео данные и интерфейсы модуля средствами встроенной в него операционной системы Linux.

В состав комплекта также входит набор библиотек трехмерных моделей, предназначенных для проектирования в CAD-системах и прототипирования с применением аддитивных технологий. Набор может применяться для практического изучения современных технологий в рамках соответствующих курсов в школе и детских технопарках.
Сценарий урока № 4. «Описание микроконтроллерной платы и набора по ро- бототехнике»
Уровень образования: основное общее. Предмет: технология.
Уровень изучения: базовый.
Тема урока:
Описание микроконтроллерной платы и набора
по робототехнике. Класс: 8.
Тип урока:
комбинированный.
Цель урока: знакомство с набором робототехники, с цифровыми и аналоговыми пор- тами микроконтроллера.
Планируемые результаты
Предметные:
•
охарактеризовать
методическое обеспечение по разработке моделей с использова- нием робототехнических наборов;
•
проектировать и реализовывать алгоритмы для управления элементарными техни- ческими системами и учебными роботами;
•
следовать инструкций в процессе разработки учебного робототехнического проек-
та;
•
конструировать простые
системы с обратной связью, в том числе на основе робото- технических конструкторов с получением сигналов
от цифровых и аналоговых дат- чиков (касания,
расстояния, света, звука и др.);
•
производить сборку
электрической или электронной цепи посредством соединения и/или подключения электронных компонентов заданным способом (пайка, беспаечный монтаж, механическая сборка)
согласно схеме;
•
проектировать и/или конструировать автоматизированные системы, в том числе с применением
специализированных программных средств и/или языков програм- мирования, электронных компонентов, датчиков, приводов,
микроконтроллеров и/ или микроконтроллерных платформ
и т. п.
Метапредметные:
регулятивные
•
умение ставить
учебные цели и задачи для усвоения нового
материала по робото-
технике, исходя из усвоенных ранее знаний по учебным предметам;
•
контроль и оценка качества
и уровня усвоения
знаний по робототехнике для дости- жения конкретных целей учения на различных этапах
обучения;
•
способность к саморегуляции для мобилизации сил и энергии
при усвоении нового
материала в робототехнике;
познавательные
•
использование комплектующих деталей робототехнического набора
в соответствии с их описанием и техническими характеристиками;
•
постановка и формулирование задачи
по робототехнике и разработка плана её ре- шения с использованием предлагаемых для этого деталей по робототехнике;
коммуникативные
•
умение сотрудничать с
учителем и с одноклассниками или членами команды для определения цели и
функций участников при решении творческих задач по робото- технике;
•
умение выявлять проблемы и
принимать решения, не вызывая конфликтных ситуа- ций при командной работе
над проектами по робототехнике.
Личностные:
•
личностное и профессиональное самоопределение с учётом развития
и внедрения новых
профессий в области
робототехники и автоматизации;
•
понимание смысла учения и умение устанавливать связи между целью обучения ро- бототехнике
и результатом, ради чего оно осуществляется.
Время реализации: 2 академических часа.
Оборудование и материалы: набор для конструирования программируемых моделей инженерных систем AR-DEK-STR-01 от ООО «Прикладная робототехника».
ХОД УРОКА
Этап урока 1. Мотивация
к учебной деятельности
Предполагаемая продолжительность: 5 мин.
Педагогическая деятельность учителя
Создаёт условия для возникновения у обучающегося внутренней
потребности вклю- чения в учебную деятельность.
Создаёт положительный эмоциональный настрой на работу. Задаёт
вопросы, вовлекая учеников
в эвристическую беседу:
1.
Что такое робототехника?
2.
Где используются роботы?
3.
Кто создаёт роботов и управляет ими?
4.
Какие современные электронные и электромеханические устройства вы знаете? Направляет учеников на формулирование темы и цели урока.
Учебная деятельность обучающихся
Мобилизуются и
организуются на предстоящую работу. Вступают в диалог с учителем,
высказывают свою точку зрения. Отвечают на вопросы, аргументируют ответы.
Следят за ответами и высказываниями других учеников. Формулируют тему и цель урока.
Планируют действия
по достижению цели урока.
Этап
урока 2. Актуализация и обобщение
знаний
Предполагаемая продолжительность: 5 мин.
Педагогическая деятельность учителя
Проводит фронтальную беседу; актуализирует имеющиеся знания, помогает
обобще- нию терминов
и понятий.
Учебная деятельность обучающихся
Вступают в диалог с учителем, высказывают свою точку зрения.
Отвечают на вопросы,
аргументируют ответы.
Следят за ответами и высказываниями других учеников.
Этап урока 3. Изучение
нового материала Предполагаемая продолжительность: 50 мин. Педагогическая деятельность учителя
Организует освоение новых понятий с использованием
презентации. На слайдах от- ражена
следующая информация: описание микроконтроллерной платы и набора по ро- бототехнике.
Многие современные электронные и электромеханические
устройства, начиная от детских игрушек
и бытовой техники
и заканчивая автомобилями и космическими кораб-
лями, начинены программируемыми электронными блоками на базе
микроконтролле- ров.
Микроконтроллер (МК) — это однокристальная микросхема с
множеством «ножек» (от 8 до 144), в составе которой функционируют такие важные устройства,
как процессор, память,
тактовый генератор, таймер, цифро-аналоговый преобразователь, порты вво- да-вывода и многое
другое. Для работы микроконтроллеру требуется источник питания и программный код для управления подключёнными внешними устройствами.
Рассмотрим набор для конструирования программируемых моделей инженерных си- стем
AR-DEK-STR-01 от ООО «Прикладная робототехника», предназначенный для разра- ботки учебных
программируемых моделей по робототехнике и умной электронике на ос- нове микроконтроллерной платформы, совместимой с платой Arduino
MEGA (рис. 1.),
с микроконтроллером ATmega 2560 от фирмы ATMEL. Различаются разные платы Ардуи-
но (UNO, NANO, МЕГА, МИКРО, LEONARDO и др.), которые отличаются по
конструкции и установленному на них типу микроконтроллера.
 |
Рис. 1. Микроконтроллерная плата Arduino
MEGA
В состав набора AR-DEK-STR-01 входят следующие
комплектующие: микроконтрол- лерная плата (ATmega 2560); кабель USB; блок питания или зарядное устройство; набор проводов;
резисторы (сопротивления); цветные светодиоды; беспаечная макетная плата; тактовые
кнопки, переключатели (тумблеры); переменные резисторы (потенциометры); терморезистор; фоторезистор; семисегментный индикатор; пьезодинамик; инфракрас- ный датчик (датчик
линии); ультразвуковой датчик (дальномер); дисплей (жидкокристал- лический индикатор
— ЖКИ 162); двигатель с редуктором и колесом; серводвигатели MG90S и PDI-6221MG-180; шаговый двигатель 28BYJ-48.

Рис. 2. Микроконтроллерная плата
(с микроконтроллером ATmega
2560)
Микроконтроллерная плата имеет следующие основные элементы:
1. Цифровые порты ввода-вывода, ШИМ-порты и
интерфейсы для подключения пери- ферийных устройств.
2.
Аналоговые входы
для подключения датчиков
аналогового сигнала.
3.
Разъёмы для подключения ведущего
и ведомого устройств
Dynamixel.
4.
Разъёмы для подключения
двигателей постоянного тока (порты: 44, 45 — ско- рость и направление вращения мотора1, 46, 47 — скорость и
направление вращения мотора 2).
5.
Разъём сетевого
стандарта Ethernet.
6.
Блок беспроводной связи по стандартам Wi-Fi и Bluetooth.
7. Кнопки для управления беспроводной передачей данных.
8.
Переключатель линии
передачи данных USB или MCU, т. е. связь по кабелю USB при программировании с компьютером либо связь центрального
микроконтроллера и внутреннего
модуля на плате.
9.
Кнопка перезапуска выполнения загруженной программы.
10.
Тумблер включения
и выключения платы.
11. Разъём для питания платы и внешних устройств.
При загрузке программы в микро- контроллер плата питается
по кабелю USB.
12.
Разъём USB для настройки модуля беспроводной связи.
13.
Разъём USB для загрузки
программы в микроконтроллер.
14.
Потенциометры, подключённые к аналоговым портам А10-А15.
15.
Тактовые кнопки для
использования в программах, подключённые к цифровым портам 35-40.
16.
Светодиоды для использования в программах, подключённые к цифровым портам
22-27.
17. Слот для карты памяти (на нижней стороне
микроконтроллерной платы).
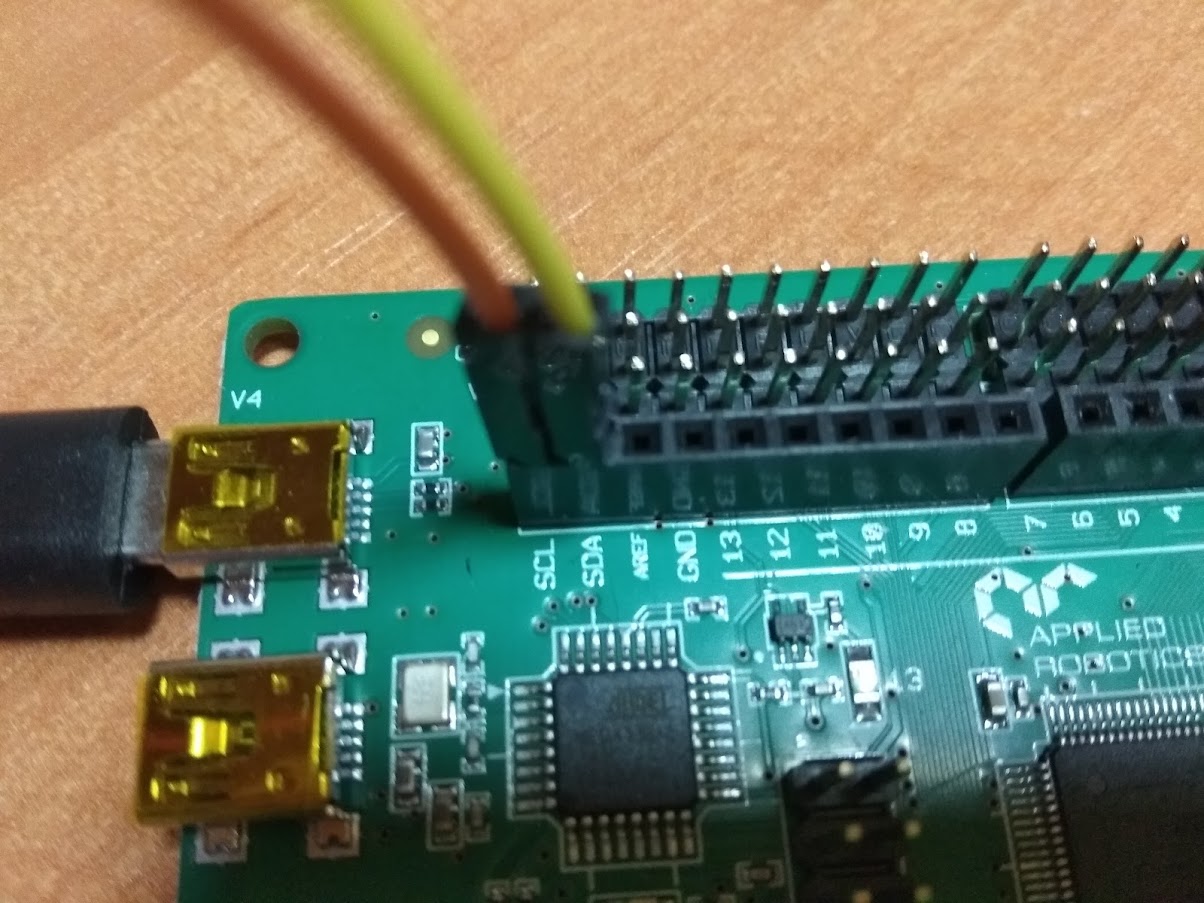
Микроконтроллерная плата
подключается к компьютеру с помощью кабеля USB (рис. 3) и используется для отладки и загрузки программы
в микроконтроллер.

Рис. 3. Кабель USB
Блок питания, или зарядное устройство (рис. 4),
используется для обеспечения элек- троэнергией как микроконтроллерной платы, так и всей робототехнической разработки. Эти источники питания
могут быть в виде адаптера
от электрической сети 220 В или бло- ка аккумуляторных батарей
и иметь выходное напряжение 5—12 В.
 |
Рис. 4. Блок питания,
или зарядное устройство
Набор соединительных проводов
и перемычек (рис. 5) используется для соединения деталей проекта, например датчиков с
микроконтроллерной платой. У проводов суще-
ствует два типа наконечников — в виде гнезда или в виде штырька, варианты
их сочета- ния называют «мама-папа», «папа-папа» и
«мама-мама». Провода для удобства выпу- скаются разных
цветов и разной длины, часто от 10 до 30 см. Есть общепринятые прави-
ла использования цветных проводов для питания устройств: красный — «плюс», а чёрный или коричневый — «земля».
 |
Рис. 5. Набор проводов
Резисторы (рис. 6) — это элементы, оказывающие сопротивление электрическому то- ку. Они используются для снижения величины напряжения на определённом участке це- пи. Номинал резисторов — это величина
электрического сопротивления, измеряемая в омах (Ом или Ω). Маркировку многих резисторов проводят цветными кольцами на корпу- се резистора (количество цветных колец может быть 4 или 5). Для разработки проектов нужно запастись
резисторами номиналов: 200 Ом, 1 кОм и 10 кОм (по 50—100
шт.).

Рис. 6. Резисторы
Светодиоды (рис. 7) используются для подачи светового
сигнала или для освещения и бывают разных цветов,
размеров и мощности. Светодиоды питаются постоянным напря- жением. На
светодиоде длинная ножка подключается к «плюсовому» выводу питания. Напряжение на светодиод подаётся
исходя из его технических характеристик, обычно в диапазоне от 2 до 3,5 В. Если характеристики светодиода неизвестны, то нужно его пи- тать напряжением не более 2,5 В.
Понижение напряжения питания понижает яркость
свечения светодиода.
ВАЖНО! Питание светодиода напряжением выше положенного по инструкции может
привести его к безвозвратной порче. Поэтому
светодиод в робототехнических проектах с напряжением источника 5—6 В подключается через добавочное сопротивление
(рези- стор) в 150—200 Ом.
Точно определить сопротивление добавочного сопротивления можно по формуле: R = (Uисточник – Uсветодиод) / Iсветодиод .
 |
Рис. 7. Цветные светодиоды
Беспаечная макетная плата (рис.  обычно используется на
обычно используется на
этапе разработки и апро- бирования
проекта, а в дальнейшем схема может быть собрана с использованием пайки. Макетная плата имеет
по краям полоски питания, а посередине — полоски спаянных гнёзд в два ряда.
ВАЖНО!
При сборке схемы на макетной
плате будьте осторожны и не допускайте ко- роткого замыкания, т. е. не замыкайте выводы источника напряжения на себя. Подклю- чайте источник
напряжения всегда к разным приборам-потребителям электроэнергии (светодиоды, двигатели
и др.). Причём напряжение питания
любого прибора-потребите- ля в схеме должно соответствовать номинальному напряжению, указанному в его техни-
ческих характеристиках. Иначе
прибор перегорит.


Рис. 8. Беспаечная макетная
плата
Кнопки и переключатели (рис. 9) используются в проектах для кратковременного или фиксированного замыкания или размыкания электрических цепей.
 |
Рис. 9. Тактовые кнопки и переключатели (тумблеры)
Потенциометры, или переменные резисторы (рис. 10), при
вращении ручки или пере- мещении ползунка меняют своё сопротивление от 0 до номинального
сопротивления, указанного на потенциометре.
 |
Рис. 10. Переменные резисторы (потенциометры)
Терморезисторы (рис. 11) меняют своё сопротивление при
изменении окружающей температуры. При повышении температуры терморезистора его сопротивление снижает-
ся. Обычно диапазон выдерживаемых терморезистором
температур составляет от –50 до +300 С. Сопротивление терморезистора при комнатной температуре составляет не— сколько кОм.
Фоторезисторы (рис. 12) меняют своё сопротивление при
изменении освещённости на рабочей поверхности (свет приёмнике). При повышении освещённости
сопротивление фоторезистора снижается.

Рис. 11. Терморезисторы и их обозначение
 |
Рис. 12. Фоторезисторы и их обозначение
Семисегментные светодиодные индикаторы (рис. 13) используются в различных про- ектах для отображения чисел: часы, счётчики, термометры, измерители
электрических параметров и т. д. Каждый светящийся
сегмент по сути является отдельным
светодиодом.
 |
Рис. 13. Семисегментный индикатор
и его распиновка
Пьезодинамик, или зуммер (рис. 14), используется в
различных проектах для звуковой сигнализации. На зуммеры нужно подавать 2—5 вольт напряжения, соблюдая
поляр- ность. От количества напряжения будет зависеть громкость
звука. Также можно управ- лять тональностью звука.
Контакты на датчиках часто обозначаются: «Vcc» или «+» — этот контакт датчика
подключается к положительной клемме источника питания; «GND» или «G» или
«–» — означает «земля» и подключается к отрицательной клемме
источника питания; «I/O» или
«S» или «AO» или «DO» — называется сигнальный контакт и предназначен для съёма сигнала
от датчика.
 |
Рис. 14. Пьезодинамик
Инфракрасный датчик (рис. 15) используется для
обнаружения препятствий и линий. Датчик
состоит из инфракрасного излучателя и приёмника. Излучатель испускает инфра- красные лучи, которые при возникновении препятствия отражаются от него, а приёмник фиксирует
отражённые лучи. Инфракрасные лучи неодинаково отражаются от поверхно- стей разных цветов. Это даёт датчику
возможность определить границу цветов (линий) на определённом расстоянии датчика от линии.
 |
Рис. 15. Инфракрасный датчик (датчик линии)
Работа ультразвукового датчика
(дальномера) (рис. 16) основана на принципе эхоло-
кации. Дальномер испускает ультразвук в пространство
и принимает отражённый от пре- пятствия сигнал. По времени распространения звуковой волны к препятствию и обратно определяется расстояние.
 |
Рис. 16. Ультразвуковой датчик (дальномер)
Жидкокристаллические индикаторы (ЖКИ) или LCD (рис. 17) предназначены
для ото- бражения текстовой или графической информации. Различаются монохромные (два цве- та) с выводом информации в 1, 2, 3 и более строк.
 |
Рис. 17. Дисплей (жидкокристаллический индикатор
— ЖКИ 162)
Двигатели с редуктором (рис. 18) применяются в различных
проектах с движущими частями, где требуется вращение
двигателя с изменением направления вращения (при изменении полярности) и частоты вращения (путём изменения величины
входного напря- жения). Редуктор
также сбавляет скорость
вращения.
 |
Рис. 18. Двигатели с редуктором
Серводвигатели (рис. 19) отличаются от обычных моторов
тем, что у них ротор или ось вращения не вращается и не делает
множество оборотов, а отклоняется от нулевого по- ложения всего лишь на заданный угол или на заданное количество градусов
в одну или в другую
сторону. Ось вращения в некоторых моделях не имеет возможности совершать полные обороты, т. е. 360 градусов, хотя
есть модели серводвигателей, которые могут при соответствующем сигнале совершать полный оборот и вращаться как
обычный двига- тель с редуктором.
 |
Рис. 19. Серводвигатели MG90S и PDI-6221MG-180
Шаговый двигатель (рис. 20) отличается от двигателя
постоянного тока тем, что совер- шает вращения своего вала не постоянно, а шагами, где каждый шаг
занимает опреде- лённое количество градусов и полный оборот 360 вал делает за большое количество шагов, разное для разных моделей
шаговых двигателей.
 |
Рис. 20. Шаговый двигатель 28BYJ-48
Учитель демонстрирует иллюстрацию, приведённую ниже, и просит назвать
изобра- жённые
радиодетали и установить соответствие между условными изображениями дета- лей и их фото.
 |
Показывает картинки (слайды)
с различными датчиками и просит обучающихся опи- сать их.
Учебная деятельность обучающихся
Называют изображённые радиодетали и находят соответствие между условными
изо- бражениями деталей
и их фото. Описывают датчики.
Этап
урока 4. Проверка
понимания и первичного закрепления
Предполагаемая продолжительность: 20 мин. Педагогическая деятельность учителя Предлагает обучающимся выполнить задания. Учебная деятельность обучающихся
Анализируют учебный
материал, организуют поиск решения.
Этап урока 5. Контроль усвоения
материала, коррекция ошибок
Предполагаемая продолжительность: 5 мин. Педагогическая деятельность учителя Контролирует выполнение работы.
Осуществляет необходимую помощь.
Корректирует ход работы, акцентирует внимание на возможные ошибки. Подводит итоги проделанной работы.
Учебная деятельность обучающихся
Проводят самоконтроль, находят и исправляют возможные ошибки. Подводят
результаты работы, фиксируют
в тетради.
Этап урока 6. Информация
о творческом задании и рефлексия
Предполагаемая продолжительность: 5 мин.
Педагогическая деятельность учителя
Предлагает творческое задание: повторить изученный
материал, найти в дополнитель- ной
литературе или в сети Интернет информацию об области применения микроконтрол- леров на производстве, подготовить сообщение.
Помогает осуществить рефлексивную учебную деятельность на основе вопросов:
1.
Что нового узнали сегодня?
2.
Что показалось особенно интересным и важным?
3.
Были ли достигнуты вами цели, которые вы для себя определили в начале урока?
 Учебная деятельность обучающихся Фиксируют творческое задание
Учебная деятельность обучающихся Фиксируют творческое задание
в тетради. Осуществляют рефлексию учебной деятельности.
Соотносят результаты учебной деятельности с поставленной целью, планируют
даль- нейшие цели деятельности.
МАТЕРИАЛЫ ДЛЯ ПОДГОТОВКИ К УРОКУ
 Материалы для копирования
Материалы для копирования
 |


 |
 ЗАДАНИЯ К УРОКУ
ЗАДАНИЯ К УРОКУ
•
Как нужно соединить четыре
резистора по 100 Ом для получения 400 Ом? 25 Ом? 250 Ом?
•
Определить сопротивление резистора по пяти цветным кольцам:
1) красный, жёл- тый, чёрный, оранжевый и золотистый; 2)
коричневый, чёрный, чёрный, чёрный, се- ребристый.
•
Определить дополнительное
сопротивление для различных по цвету светодиодов и разных по величине выходного напряжения блоков питания
(6v, 7v, 9v, 12v).
•
Собрать на макетной плате схему включения
и выключения светодиода с помощью кнопки. Для этого понадобятся: светодиод, резистор (200 Ом), блок пита- ния (5—9 В), тактовая
кнопка, макетная плата,
соединительные провода.
•
Установить одноразрядный
семисегментный индикатор на макетную плату, подклю- чить источник
питания на 3 В и, используя соединительные провода, зажигать раз- личные цифры на индикаторе.
Перечень доступных источников информации: сайт для изучения
языка Ардуи- но: http://arduino.ru/Reference, сайт для создания проектов Ардуино: https://www. tinkercad.com
Дополнительная информация
1.
Абдулгалимов Г. Л., Косино О. А., Субочева М. Л. Основы образовательной робото- техники (на примере
Ардуино). — М.: Издательство «Перо»,
2018. — 148 с.
2.
Блум Джереми. Изучаем Arduino: инструменты и методы технического волшебства / пер. с англ.
— СПб.: БХВ-Петербург, 2015. — 336 с.
3.
Петин В. А. Создание умного дома на базе Arduino. — М.: ДМК Пресс, 2018. — 180 с.
4.
Бокселл Дж. Изучаем Arduino. 65 проектов своими руками. — СПб.: Питер,
2017. — 400 с.
5.
Бейктал Дж. Конструируем
роботов на Arduino.
Первые шаги, пер. с англ. О. А. Тре- филовой. Эл. изд.— М.: Лаборатория знаний, 2016. — 323 с.
6.
Ярнольд, Стюарт. Arduino для начинающих: самый простой
пошаговый самоучи- тель / Стюарт Ярнольд
; пер. с англ. М. Райтман. — М.: Эксмо,
2017. — 256 с.
Образовательный набор электронике, электромеханике и микропроцессорной технике «Конструктор программируемых моделей инженерных систем. Расширенный набор» предназначен для проведения учебных занятий по электронике и схемотехнике с целью изучения наиболее распространенной элементной базы, применяемой для инженерно-технического творчества учащихся и разработки учебных моделей роботов. Набор позволяет проведение учебных занятий по изучению основ мехатроники и робототехники, практического применения базовых элементов электроники и схемотехники, а также наиболее распространенной элементной базы и основных технических решений, применяемых при проектировании и прототипировании различных инженерных, кибернетических и встраиваемых систем.
Данный образовательный комплект «Конструктор программируемых моделей инженерных систем. Расширенный» предназначен для разработки программируемых моделей на основе многофункционального контроллера типа «Arduino», совместимого с периферийными устройствами и модулями расширения Arduino Mega2560, а также адаптированного для разработки мехатронных систем с большим числом приводов, мобильных и манипуляционных роботов, оснащенных системой технического зрения.

В состав комплекта входит набор электронных компонентов для изучения основ электроники и схемотехники, комплект приводов и датчиков различного типа для разработки робототехнических комплексов, а так же модуль технического зрения для распознавания заранее заданных графических объектов. Комплектующие и устройства набора обладают конструктивной, электрической, аппаратной и программной совместимостью друг с другом.
В состав комплекта входит:
- Комплект металлических конструктивных элементов для сборки макета мобильного робота, 1 шт
- Комплект конструктивных элементов из металла для сборки макета манипуляционного робота, 1 шт
- Сервопривод большой, 4 шт
Сервопривод, представляющий собой единый электромеханический модуль, включающий в себя привод на базе двигателя постоянного тока, понижающий редуктор. Напряжение питания: 6 В - Сервопривод малый, 2 шт
Сервопривод, представляющий собой единый электромеханический модуль, включающий в себя привод на базе двигателя постоянного тока, понижающий редуктор. Напряжение питания привода: 6 В. - Привод постоянного тока, 2 шт.
Привод, представляющий собой, электромеханический модуль, включающий в себя привод на базе двигателя постоянного тока, понижающий редуктор. Напряжение питания привода: 6 В. - Фотоэлектрический модуль для измерения числа оборотов вращения вала, 2 шт
Напряжение питания: 5 В. В состав входит кодировочный диск с прорезями — 1 шт. - Шаговый привод, 2 шт
Электромеханический модуль, включающий в себя привод на базе двигателя постоянного тока, понижающий редуктор. Технические характеристики привода: Напряжение питания — 6 В. - Модуль для создания дополнительной точки опоры в собираемых конструкциях. Тип 1, 1 шт
Высота модуля в сборе — 26 мм. Диаметр шара модуля — 14 мм. - Аккумуляторная батарея, 1 шт
Номинальное значение выходного напряжения — 7,2 В. Емкость — 1400 мА*ч. - Зарядное устройство аккумуляторных батарей, 1 шт
Максимальный ток заряда — 0,2 А. Номинальное напряжение заряжаемых аккумуляторов — 7,2 В. Входное напряжение — 220 В. - Блок питания, 1 шт
Выходной ток — 2 А. Выходное напряжение — 12 В. - Плата для беспаечного прототипирования, 1 шт
Общее количество контактов — 830 шт. Кол-во контактов питания — 200 шт. Кол-во контактов для монтажа — 630 шт. Диаметр контакта — 0,8 мм. Шаг точек — 2,54 мм. Габариты (ДхШхВ) — 165х55х10 мм. - Набор проводов тип «Папа-Папа», 1 шт
- Набор проводов тип «Папа-Мама», 1 шт
- Набор проводов тип «Мама-Мама», 1 шт
- Набор 3х проводных шлейфов «Папа-Мама», 1 шт
- Набор проводов для макетирования, 1 шт
Общее количество проводов для макетирования — 56 шт. - Комплект светодиодов, 1 шт
Количество различных оттенков — 5 шт. Кол-во модулей в наборе — 100 шт. Напряжение питания — 5В. - Комплект резисторов, 1 шт
Количество различных номиналов сопротивления — 30 шт. Общее кол-во элементов в наборе — 600 шт. - Звуковой излучатель, 1 шт
- Датчик освещенности, 1 шт
- Датчик температуры, 1 шт
- Инфракрасный датчик, 3 шт
- Тактовая кнопка, 5 шт
- Потенциометр, 3 шт
- Семисегментный индикатор, 1 шт
Количество разрядов — 1 шт. Напряжение питания — 5 шт. - Жидкокристаллический дисплей, 1 шт
Напряжение питания — 5 В. - Датчик расстояния УЗ-типа, 3 шт
Нижняя граница диапазона измеряемой дальности — 0,02 м. Верхняя граница диапазона измеряемой дальности — 4 м. Напряжение питания — 5 В. - Модуль беспроводного управления по ИК-каналу, 1 шт
- Модуль приемника, 1 шт
- Модуль пульта управления со встроенным передатчиком, 1 шт
Количество кнопок управления — 12 шт. - Внешний модуль беспроводной передачи данных по технологии Bluetooth, 1 шт
Версия Bluetooth — 2.0. Имеется интерфейс передачи данных UART. Напряжение питания — 5 В. - Мультидатчик для измерения температуры и влажности окружающей среды, 1 шт
Интерфейсный разъем типа RJ14 — 1 шт. Интерфейс 1-wire TTL — 1 шт. Штыревой интерфейсный разъем — 1 шт. Количество линий штыревого интерфейсного разъема — 6 шт. Наличие цифровых и аналоговых портов. Встроенный вычислительный микроконтроллер — 1 шт. Тактовая частота микроконтроллера — 16 МГц. Объем памяти, доступной по шине данных микроконтроллера — 8 Кбайт. Минимально допустимый уровень напряжения питания — 5 В. Максимально допустимый уровень напряжения питания — 12 В. Размеры (ДхШ) — 40х26 мм. - Робототехнический контроллер, 1 шт
Робототехнический контроллер, представляющий собой модульное устройство на основе программируемого контроллера. Робототехнический контроллер обеспечивает возможность осуществлять разработку программного кода, используя инструментарий сред разработки Arduino IDE и Mongoose OS и языков программирования CC++, JavaScript. Размеры (ДхШ) — 80х130 мм.
Технические характеристики программируемого контроллера:
Нижняя граница диапазона питания внешней аккумуляторной батареи — 6,8 В, верхняя граница диапазона питания внешней аккумуляторной батареи — 12 В. Порты для подключения внешних цифровых и аналоговых устройств — 50 шт; Интерфейс USB — 2 шт; Тумблер для коммутирования подачи электропитания — 1 шт; Интерфейс USART — 3 шт; Интерфейс I2C — 1 шт; интерфейс SPI — 1 шт; Интерфейс типа 1-wire TTL — 1 шт; Интерфейс Ethernet — 1 шт; Интерфейс Wi-Fi — 1 шт; Интерфейс Bluetooth — 1 шт; интерфейс внутрисхемного программирования ISP — 2 шт; Программируемая кнопка — 6 шт; Программируемый светодиод — 7 шт. Электромеханические модули для организации системы ручного управления — 6 шт. - Модуль технического зрения, представляющий собой вычислительное устройство со встроенным микропроцессором, интегрированной телекамерой и оптической системой, 1 шт.
Модуль технического зрения представляет собой вычислительное устройство со встроенным микропроцессором, обеспечивающее выполнение всех измерений и вычислений посредством собственных вычислительных возможностей встроенного микропроцессора, а также возможность разработки и установки пользовательского программного обеспечения, использующего аппаратные вычислительные ресурсы микропроцессора, память, видео данные и интерфейсы модуля средствами встроенной в него операционной системы Linux.
Имеется возможность коммуникации с аналогичными модулями посредством шины на базе последовательного интерфейса с целью дальнейшей передачи результатов измерений группы модулей на управляющее вычислительное устройство, подключенное к данной шине. Встроенное программное обеспечение, позволяет осуществлять настройку модуля технического зрения — настройку экспозиции, баланса белого, HSV составляющих, площади обнаруживаемой области изображения, округлости обнаруживаемой области изображения, положение обнаруживаемых областей относительно друг друга, машинное обучение параметров нейронных сетей для обнаружения объектов, форму и закодированные значения обнаруживаемых маркеров типа Aruco, размеры обнаруживаемых окружностей, квадратов и треугольников, параметров контрастности, размеров, кривизны и положения распознаваемых линий.
Размеры модуля (ДхШхВ) — 56х41х33 мм. Имеется беспроводной интерфейс Wi-Fi для настройки модуля, передачи видео потока и данных об обнаруженных объектах со стационарных и мобильных устройств (смартфона, планшета), подключения модуля к сети Интернет. Интерфейс Bluetooth для обмена данными с модулем с мобильных устройств — версия 4.0. Интерфейс USB для настройки модуля, передачи видео потока и обмена данными — 1 шт. Интерфейс MicroSD для подключения внешнего запоминающего устройства — 1 шт.
Кол-во ядер процессора — 4 шт. Оперативная память — 512 МБайт. Встроенное запоминающее устройство — 8 Гигабайт. Частота получения и передачи видео потока между программным обеспечением, исполняемым на модуле, при разрешении 2592×1944 — 15 кадров/с. Частота получения и передачи видео потока между программным обеспечением, исполняемым на модуле, при разрешении 1280×960 — 30 кадров/с. Частота передачи видео потока по интерфейсу USB при разрешении 640х480 — 30 кадров/с. Частота передачи видео потока по интерфейсу Wi-Fi при разрешении 640х480 — 15 кадров/с. Максимальное разрешение видеопотока, передаваемого по интерфейсу USB — 2592х1944 пикселей. Кол-во градаций цветовой палитры — 65536 шт. Кол-во различных объектов , обнаруживаемых одновременно в секторе обзора модуля — 10 шт.
Порт питания +12В — 1 шт. Порт питания +5В — 2 шт. Порт типа GND «земля» — 6 шт. Интерфейс UART для отладки встроенной операционной системы и разрабатываемого программного обеспечения — 1 шт. Интерфейс UART для обмена данными с настраиваемым напряжением как 3.3В так и 5В — 1 шт. Интерфейс I2C — 1 шт. Интерфейс SPI, позволяющий выполнять обмен данными с напряжением как 3.3В так и 5В — 1 шт. Интерфейс I2S — 1 шт. Интерфейс USB ведущий (хост) для подключения периферийных устройств через штыревой соединитель с шагом 2.54 мм — 1 шт. Интерфейс Ethernet для подключения периферийных устройств через штыревой соединитель с шагом 2.54 мм — 1 шт. Коммуникационный интерфейс типа 1-wire TTL для связи по последовательной шине — 1 шт. - Универсальный вычислительный модуль, 1 шт.
Универсальный вычислительный модуль представляет собой микропроцессорное устройство, предназначенное для управления устройствами, входящими в состав образовательного робототехнического комплекта. Интерфейс 1-wire TTL для подключения по последовательному интерфейсу — 1 шт. Размеры (ДхШ) — 40х40 мм. Нижняя граница диапазона допустимого напряжения питания — 5 В. Верхняя граница диапазона допустимого напряжения питания — 12 В. Объем Flash памяти — 256 Кб. Тактовая частота процессора — 16 МГц. Интерфейс USB — 2 шт. Кол-во цифровых портов «Ввода-Вывода» — 12 шт. Кол-во аналоговых портов — 16 шт. Интерфейсы UART (1 шт), I2C (1 шт), SPI (1 шт). Линия питания «+12В» — 1 шт. Линия питания «+5В» — 1 шт. Линия питания «+3,3В» — 1 шт. Линия питания «Земля» — 1 шт. Светодиодный индикатор — 1 шт. Имеются беспроводной интерфейс WiFi и беспроводной интерфейс Bluetooth. Переключатель — 1 шт. Кнопка — 3 шт. - Плата расширения универсального вычислительного модуля. Тип 1, 1 шт.
Плата расширения должна обеспечивать возможность подключения универсального вычислительного модуля к сети посредством интерфейса Ethernet. Размеры (ДхШ), 40х40 мм. Напряжение питания, 5 В. Кол-во портов «Ввода-Вывода», 40 шт. Интерфейс Ethernet, 1 шт. Интерфейс SPI, 1 шт. Интерфейс подключения карты microSD, 1 шт. Светодиодный индикатор — 4 шт. Кнопка — 1 шт. - Плата расширения универсального вычислительного модуля. Тип 2, 1 шт.
Плата расширения для подключения силовой нагрузки должна обеспечивать возможность прямого подключения внешней силовой нагрузки, а также регулируемой нагрузки посредством PWM интерфейса. Размеры (ДхШ) — 40х40 мм. Нижняя граница диапазона допустимого напряжения питания — 5 В. Верхняя граница диапазона допустимого напряжения питания — 12 В. Количество линий ввода-вывода — 40 шт. Количество силовых выводов с PMW управлением — 4 шт. Количество выводов для коммутации силовой нагрузки с прямым управлением — 4 шт. Коммутируемая нагрузка на выводах с прямым управлением — 3,2 А. Количество интерфейсов для коммутации внутреннего напряжения питания — 2 шт. Индикаторы — 8 шт. - Комплект пневматического захвата, 1 шт.
Тип захвата — вакуумная присоска. Состав: вакуумная присоска (1 шт), Электромагнитный клапан (1 шт), Воздушный насос (1 шт) и Виниловая трубка (1 шт, длиной 1 м). Напряжение питания — 5 В. - Учебное пособие, 1 шт.
В состав набора входит пособие по изучению основ электроники и схемотехники, решений в сфере «Интернет вещей», разработки и прототипированию моделей роботов. - Учебное пособие, 1 шт
В состав набора входит пособие по изучению основ разработки систем технического зрения и элементов искусственного интеллекта.

Набор обеспечивает возможность разработки модели мобильного робота, управляемого посредством программного обеспечения для персонального компьютера и мобильных устройств на базе ОС Android, IOS, обеспечивающего возможность управления мобильным роботом и встроенным манипулятором посредством графического интерфейса, включающим в себя набор кнопок и переключателей, джойстик, область для отображения видео.
Набор обеспечивает возможность изучения основ электроники и схемотехники, разработки и прототипированию моделей роботов, разработки программных и аппаратных комплексов инженерных систем, решений в сфере «Интернет вещей», а также решений в области робототехники, искусственного интеллекта и машинного обучения.
В состав комплекта также входит набор библиотек трехмерных моделей, предназначенных для проектирования в CAD-системах и прототипирования с применением аддитивных технологий. Набор может применяться для практического изучения современных технологий в рамках соответствующих курсов в школе и детских технопарках.
�� ��������� ����������� ������� ��������� � ������ �������� �������� ������� �� ������ ��������, ����� ���� ������� �������� ����������� �������� �� ���������� ����.
�������� �� ������
�������� (��-��). ������ �������� ����� � ���� ������ � 18 �� 21.00 (��� �������, ��� ����� ����������� �� 18.00), ���� ������� ���������� ��� (���� ����� ����������� ����� 18.00).
�����������
�� ������ ������� ���������� �� ����� ����� � ����� ���� � ������� ��� �����. ���� ������ � ���������� ������� �������� ����� ������ �����. ��������������� ����� ����� ���������� ��� � ������� ���� ������� ����.