Назначение
Системы измерительные с автоматической фотовидеофиксацией многоцелевые «ЛОБАЧЕВСКИЙ» (далее — Системы), предназначены для измерения скорости движения транспортных средств (далее — ТС) радиолокационным методом, по видеокадрам в зоне контроля и на контролируемом участке дороги в автоматическом режиме, расстояния до ТС, определения текущих значений времени, синхронизированных с национальной шкалой координированного времени UTC(SU), определения координат местоположения Систем в плане, а также (в зависимости от комплектации) могут быть предназначены для измерений нагрузки на ось транспортного средства; нагрузки на группу осей транспортного средства; массы транспортного средства; габаритных размеров транспортного средства, межосевых расстояний транспортного средства; определение количество скатов, осей и колес на оси транспортного средства; автоматических измерений скорости и направления воздушного потока, температуры воздуха, относительной влажности воздуха, атмосферного давления, количества атмосферных осадков.
Описание
Системы имеют модульную архитектуру и включают в себя измерительный модуль (далее — ИМ) и могут включать модуль вычислительного сервера (далее — ВС), модуль измерения весогабаритных параметров ТС (далее — МВ), модуль измерения метеорологических параметров (далее — ММ).
ИМ представляет из себя моноблок, выполнен в пыле-влагозащищенном корпусе, содержит в себе: радарный блок и/или видео блок, навигационный приемник, блок инфракрасной подсветки, блок питания, и может включать в себя модуль ВС. ИМ обеспечивает измерение скорости движения ТС радиолокационным методом, по видеокадрам в зоне контроля и на контролируемом участке дороги в автоматическом режиме, расстояния до ТС, определения текущих значений времени, синхронизированных с национальной шкалой координированного времени UTC(SU) и определения координат местоположения Систем в плане.
Принцип действия ИМ:
при измерении скорости движения ТС по видеокадрам в зоне контроля основан на измерении расстояния, пройденного ТС в зоне контроля за измеренный интервал времени;
при измерении скорости движения ТС радиолокационным методом в зоне контроля, основан на измерении разности частоты высокочастотных сигналов при отражении от движущегося объекта, находящегося в зоне контроля (эффект Доплера);
при измерении скорости движения ТС на контролируемом участке дороги, основан на измерении интервала времени, за который ТС прошло расстояние между модулями Системы;
— при измерении расстояния до ТС основан на измерении относительных фазовых сдвигов сигналов, отраженных от контролируемого ТС;
при измерении значений текущего времени и координат основан на приеме и обработке сигналов глобальных навигационных спутниковых систем ГЛОНАСС/GPS с помощью приемника, входящего в состав Систем, автоматической синхронизации шкалы времени Систем с национальной шкалой координированного времени UTC(SU).
ИМ изготавливаются в четырех модификациях. Модификации отличаются функционалом.
«СМ-М» — обеспечивает измерение текущих значений времени, синхронизированных с национальной шкалой координированного времени UTC(SU) и определение координат местоположения Систем в плане;
«СМ-В» — обеспечивает измерение скорости движения ТС по видеокадрам в зоне контроля в автоматическом режиме, измерение расстояния до ТС, определение текущих значений времени, синхронизированных с национальной шкалой координированного времени UTC(SU) и определение координат местоположения Систем в плане;
«СМ-Р» — обеспечивает измерение скорости движения ТС радиолокационным методом в зоне контроля в автоматическом режиме, измерение расстояния до ТС, определение текущих значений времени, синхронизированных с национальной шкалой координированного времени UTC(SU) и определение координат местоположения Систем в плане;
«СМ-К» — обеспечивает измерение скорости движения ТС радиолокационным методом и/или по видеокадрам в зоне контроля в автоматическом режиме, измерение расстояния до ТС, определение текущих значений времени, синхронизированных с национальной шкалой координированного времени UTC(SU) и определение координат местоположения Систем в плане.
ВС представляет собой внешний модуль, выполненный в пыле-влагозащищенном корпусе или может входит в состав ИМ. ВС включает в себя компьютер и программное обеспечение «Lobachevsky». ВС собирает и обрабатывает данные со всех модулей Системы. При наличии в составе Системы нескольких модулей ВС назначается один главный сервер.
В качестве МВ используются средства измерений утвержденного типа (регистрационные номера 71822-18, 62427-15 в Федеральном информационном фонде), предназначенные для автоматических измерений нагрузки на ось движущегося ТС; нагрузки на группу осей ТС; массы ТС; габаритных размеров ТС (длина, ширина, высота); скорости движения ТС; межосевых расстояний ТС; определения количества скатов, осей и колес на оси ТС. МВ должен обеспечивать передачу данных измеряемых параметров через Ethernet.
В качестве ММ используются средства измерений утвержденного типа (регистрационные номера 40331-14, 63313-16, 71764-18 в Федеральном информационном фонде), предназначенные для автоматических измерений метеорологических параметров: скорости и направления воздушных потоков, температуры воздуха, относительной влажности воздуха, атмосферного давления, количества атмосферных осадков, энергетической освещенности. ММ должен обеспечивать передачу данных измеряемых параметров через Ethernet или интерфейс RS485 или радиомодем стандарта GSM.
Системы могут использоваться в двух вариантах:
Стационарный вариант размещения — модули Системы размещаются на опорах, стойках и других элементах обустройства автомобильных дорог;
Передвижной вариант размещения — модули Системы размещаются на штативах, треногах и т.п., на базе транспортных средств.
Системы имеющие в составе МВ и/или ММ и/или внешний ВС и/или ИМ в модификации СМ-В используются в стационарном варианте исполнения Системы.
При наличие в Системе нескольких ИМ установленных стационарно, в Системе может быть реализована функция измерения скорости движения ТС на контролируемом участке дороги.
Системы в зависимости от исполнения имеют следующее обозначение:
ЛОБАЧЕВСКИЙ — Х — Х Х Х Х
Тип системы
Обозначение модификации ИМ:
М — «СМ-М»; В — «СМ-В»; Р — «СМ-Р»; К — «СМ-К».
Наличие функции измерения скорости ТС на контролируемом участке дороги:
0 — модуль отсутствует; 1 — модуль присутствует
Наличие внешнего модуля ВС:
0 — модуль отсутствует; 1 — модуль присутствует
Наличие модуля МВ:
0 — модуль отсутствует; 1 — модуль присутствует Наличие модуля ММ:
0 — модуль отсутствует; 1 — модуль присутствует
На корпусе ИМ и ВС установлены маркировочные таблички, содержащие наименование, модификацию и заводской номер Системы, тип составной части, дату выпуска, торговую марку изготовителя и знак утверждения типа средства измерений.
Общий вид ИМ и ВС, места нанесения маркировки, знака утверждения и пломб представлены на рисунках 1 и 2.
I
Рисунок 2 — Общий вид ВС
Программное обеспечение
Программным обеспечением комплекса является программа «Lobachevsky»
ПО «Lobachevsky» содержит метрологически значимую часть «Lobachevsky-MS». Уровень защиты ПО «высокий» в соответствии с Р 50.2.077-2014.
Таблица 1 — Идентификационные данные метрологической части ПО
|
Идентификационные данные (признаки) |
Значение |
|
Идентификационное наименование программного обеспечения |
Lobachevsky-MS |
|
Номер версии (идентификационный номер) программного обеспечения |
1.0 |
|
Цифровой идентификатор ПО (контрольная сумма исполняемого кода) |
ddd4b3fc5f25d90ba7ac55160d7ca02d889bd237 |
|
Алгоритм вычисления идентификатора ПО |
MD5 |
Технические характеристики
Таблица 2 — Метрологические характеристики
|
Наименование характеристики |
Значение |
|
Диапазон измерений скорости движения ТС, км/ч: при измерении в зоне контроля: — радиолокационный метод измерения — метод измерения по видеокадрам при измерении на контролируемом участке дороги |
от 1 до 320 от 0 до 350 от 0 до 350 |
|
Пределы допускаемой абсолютной погрешности измерений скорости движения ТС, км/ч: при измерении в зоне контроля: — радиолокационный метод измерения — метод измерения по видеокадрам при измерении на контролируемом участке дороги |
±1 ±1 ±1 |
|
Диапазон измерений расстояния от ИМ до ТС, м |
от 1 до 100 |
|
Пределы допускаемой абсолютной погрешности измерений расстояния от ИМ до ТС, м |
±1 |
|
Наименование характеристики |
Значение |
|
Пределы допускаемой абсолютной погрешности определения текущего значения времени в национальной шкале координированного времени UTC(SU), мс |
±1 |
|
Допускаемые границы абсолютной инструментальной погрешности (при доверительной вероятности 0,95) определения координат местоположения Системы в плане в статическом режиме при геометрическом факторе PDOP не более 3, м |
±3 |
Таблица 3 — Основные технические характеристики
|
Наименование характеристики |
Значение |
|
Минимальное расстояние контролируемого участка дороги, м |
100 |
|
Габаритные размеры ИМ, мм, не более: |
|
|
— длинна |
170 |
|
— ширина |
170 |
|
— высота |
160 |
|
Габаритные размеры ВС, мм, не более: |
|
|
— высота |
1000 |
|
— ширина |
800 |
|
— глубина |
400 |
|
Масса, кг, не более: |
|
|
ИМ |
4 |
|
ВС |
4 |
|
Условия эксплуатации ИМ и ВС: |
|
|
— диапазон температуры окружающего воздуха, °C |
от -60 до +65 |
|
— атмосферное давление, гПа |
от 600 до 1100 |
|
— относительная влажность при температуре 35 °C, % |
до 98 |
|
Потребляемая мощность, В А, не более: |
|
|
ИМ |
20 |
|
ВС |
700 |
|
Степень защиты по ГОСТ 14254-2015: |
|
|
ИМ |
IP 65/IP 67 |
|
ВС |
IP 65 |
|
Параметры электрического питания: |
|
|
ИМ |
|
|
— напряжение постоянного тока, В |
от 8 до 19 |
|
ВС |
|
|
— напряжения переменного тока, В |
от 90 до 300 |
|
— частота, Гц |
50 ±1 |
Знак утверждения типа
наносится типографским способом на титульный лист Руководства по эксплуатации и на маркировочную табличку.
Таблица 4 — Комплектность средства измерений
|
Наименование |
Обозначение |
Количество |
|
Система измерительная с автоматической многоцелевая фотовидеофиксацией «ЛОБАЧЕВСКИЙ» в составе: |
||
|
ИМ |
1* |
|
|
ВС |
по заказу |
|
|
МВ |
по заказу |
|
|
ММ |
по заказу |
|
|
Набор кронштейнов |
по заказу |
|
|
Система измерительная с автоматической многоцелевая фотовидеофиксацией «ЛОБАЧЕВСКИЙ». Формуляр |
39331983.402139.001 ФО |
1 экз. |
|
Системы измерительные с автоматической многоцелевые фотовидеофиксацией «ЛОБАЧЕВСКИЙ». Руководство по эксплуатации |
39331983.402139.001 РЭ |
1 экз. |
|
Системы измерительные с автоматической многоцелевые фотовидеофиксацией «ЛОБАЧЕВСКИЙ». Методика поверки |
39331983.402139.001 МП |
1 экз. |
|
* — колчичество может быть увеличено по заказу |
Поверка
осуществляется по документу 39331983.402139.001 МП «Системы измерительные с автоматической фотовидеофиксацией многоцелевые «ЛОБАЧЕВСКИЙ». Методика поверки», утвержденным ФГУП «ВНИИФТРИ» 30 июня 2020 г.
Основные средства поверки:
— имитатор параметров движения транспортных средств «Сапсан 3М», регистрационный номер 73015-18 в Федеральном информационном фонде;
— GNSS-приемники спутниковые геодезические многочастотные SIGMA, регистрационный номер 40862-09 в Федеральном информационном фонде;
— аппаратура навигационно-временная потребителей глобальных навигационных спутниковых систем ГЛОНАСС/GPS/GALILEO/SBAS NV08C-MCM, NV08C-CSM, NV08C-CSM-DR, регистрационный номер 52614-13 в Федеральном информационном фонде;
— источники первичные точного времени УКУС-ПИ 02ДМ, регистрационный номер 60738-15 в Федеральном информационном фонде.
Допускается применение аналогичных средств поверки, обеспечивающих определение метрологических характеристик поверяемых комплексов с требуемой точностью.
Знак поверки наносится в свидетельство о поверке.
Сведения о методах измерений
приведены в эксплуатационном документе.
Нормативные документы
Государственная поверочная схема для средств измерений времени и частоты. Приказ Росстандарта № 1621 от 31.07.2018 г.
39331983.402139.001 ТУ «Системы измерительные с автоматической фотовидеофиксацией многоцелевые «ЛОБАЧЕВСКИЙ» Технические условия»
Многоцелевой измерительный комплекс «ЛОБАЧЕВСКИЙ» предназначен для измерения скорости движения
транспортных средств (далее — ТС) радиолокационным методом, по видеокадрам в зоне
контроля и на контролируемом участке дороги в автоматическом режиме, расстояния до ТС,
определения текущих значений времени, синхронизированных с национальной шкалой
координированного времени UTC(SU), определения координат собственного местоположения в
плане, а также (в зависимости от комплектации) может быть предназначен для измерений
нагрузки на ось транспортного средства, нагрузки на группу осей транспортного средства,
массы транспортного средства, габаритных размеров транспортного средства, межосевых
расстояний транспортного средства, определение количество скатов, осей и колес на оси
транспортного средства, автоматических измерений скорости и направления воздушного
потока, температуры воздуха, относительной влажности воздуха, атмосферного давления,
количества атмосферных осадков.

Прицип действия измерительного модуля
- при измерении скорости движения ТС по видеокадрам в зоне контроля основан на измерении расстояния,
пройденного ТС в зоне контроля за измеренный интервал времени - при измерении скорости движения ТС радиолокационным методом в зоне контроля,
основан на измерении разности частоты высокочастотных сигналов при отражении от
движущегося объекта, находящегося в зоне контроля (эффект Доплера) - при измерении скорости движения ТС на контролируемом участке дороги, основан
на измерении интервала времени, за который ТС прошло расстояние между модулями Системы - при измерении расстояния до ТС основан на измерении относительных фазовых
сдвигов сигналов, отраженных от контролируемого ТС - при измерении значений текущего времени и координат основан на приеме и
обработке сигналов глобальных навигационных спутниковых систем ГЛОНАСС/GPS с
помощью приемника, входящего в состав Систем, автоматической синхронизации шкалы
времени Систем с национальной шкалой координированного времени UTC(SU)
Характеристики комплекса «Лобачевский»
| Диапазон измерений скорости движения ТС, км/ч | |
| при измерении в зоне контроля | |
| радиолокационный метод измерения | от 1 до 320 |
| метод измерения по видеокадрам | от 0 до 350 |
| при измерении на контролируемом участке дороги | от 0 до 350 |
| Пределы допускаемой абсолютной погрешности измерений скорости движения ТС, км/ч | |
| при измерении в зоне контроля | |
| радиолокационный метод измерения | ±1 |
| метод измерения по видеокадрам | ±1 |
| при измерении на контролируемом участке дороги | ±1 |
| Диапазон измерений расстояния от ИМ до ТС, м | от 1 до 100 |
| Пределы допускаемой абсолютной погрешности измерений расстояния от ИМ до ТС, м | ±1 |
| Пределы допускаемой абсолютной погрешности определения текущего значения времени в национальной шкале координированного времени UTC(SU), мс | ±1 |
| Допускаемые границы абсолютной инструментальной погрешности (при доверительной вероятности 0,95) определения координат местоположения Системы в плане в статическом режиме при геометрическом факторе PDOP не более 3, м | ±3 |
| Минимальное расстояние контролируемого участка дороги, м | 100 |
| Габаритные размеры ИМ, мм, не более | |
| длинна | 170 |
| ширина | 170 |
| высота | 160 |
| Габаритные размеры ВС, мм, не более | |
| высота | 1000 |
| ширина | 800 |
| глубина | 400 |
| Масса, кг, не более | |
| ИМ | 4 |
| ВС | 4 |
| Условия эксплуатации ИМ и ВС | |
| диапазон температуры окружающего воздуха, °C | от -60 до +65 |
| атмосферное давление, гПа | от 600 до 1100 |
| относительная влажность при температуре 35 °C, % | до 98 |
| Потребляемая мощность, В·А, не более | |
| ИМ | 20 |
| ВС | 70 |
| Степень защиты по ГОСТ 14254-2015 | |
| ИМ | IP 65/IP 67 |
| ВС | IP 65 |
| Параметры электрического питания | |
| ИМ | |
| напряжение постоянного тока, В | от 8 до 19 |
| ВС | |
| напряжение переменного тока, В | от 90 до 300 |
| частота, Гц | 50 ±1 |
Системы измерительные с автоматической фотовидеофиксацией многоцелевые «ЛОБАЧЕВСКИЙ» предназначены для измерения скорости движения транспортных средств (далее — ТС) радиолокационным методом, по видеокадрам в зоне контроля и на контролируемом участке дороги в автоматическом режиме, расстояния до ТС, определения текущих значений времени, синхронизированных с национальной шкалой координированного времени UTC(SU), определения координат местоположения Систем в плане, а также (в зависимости от комплектации) могут быть предназначены для измерений нагрузки на ось транспортного средства; нагрузки на группу осей транспортного средства; массы транспортного средства; габаритных размеров транспортного средства, межосевых расстояний транспортного средства; определение количество скатов, осей и колес на оси транспортного средства; автоматических измерений скорости и направления воздушного потока, температуры воздуха, относительной влажности воздуха, атмосферного давления, количества атмосферных осадков.
Система, включающая в себя ПО LOBACHEVSKY (LOBACHEVSKY-MS), выполняет следующие основные функции:
- Определение параметров движения ТС, автоматической фотовидеофиксацией и идентификацией зафиксированных событий;
- Автоматическое определение весогабаритных параметров ТС и автоматическое измерение метеорологических параметров;
- Анализ видеопотока с целью выявления ситуаций, когда скорость ТС на УДС превышает установленный порог, снабжение видеоданных отметками;
- Данных времени и места расположения в том случае, когда можно однозначно присвоить выявленное значение превышения скорости определенному ТС, видимому в поле зрения видеокамеры;
- Анализ характеристик транспортного потока, его состав, скорость движения по полосам, интенсивность;
- Взаимодействие со светофорным контроллером для целей локального адаптивного управления;
- Защита данных от несанкционированного доступа. Разграниченный уровень доступа к управлению ИС и ее функциям;
- Фиксация в автоматическом режиме всех ТС, следующих через зону контроля Системы во встречном и попутном направлениях;
- Фиксация нарушений ПДД (идентификация зафиксированных событий) в автоматическом круглосуточном режиме;
- Видеонаблюдение за дорожной обстановкой;
- Фиксация в автоматическом режиме знака и информационной таблички «Опасный груз»;
- Система осуществляет фиксацию в автоматическом круглосуточном режиме нарушений ПДД.
Описание средств измерений системы Лобачевский
Системы Лобачевский имеют модульную архитектуру и включают в себя измерительный модуль (далее — ИМ) и могут включать модуль вычислительного сервера (далее — ВС), модуль измерения весогабаритных параметров ТС (далее – МВ), модуль измерения метеорологических параметров (далее — ММ).
ИМ представляет из себя моноблок, выполнен в пыле-влагозащищенном корпусе, содержит в себе: радарный блок и/или видео блок, навигационный приемник, блокинфракрасной подсветки, блок питания, и может включать в себя модуль ВС. ИМ обеспечивает измерение скорости движения ТС радиолокационным методом, по видеокадрам в зоне контроля и на контролируемом участке дороги в автоматическом режиме, расстояния до ТС, определения текущих значений времени, синхронизированных с национальной шкалой координированного времени UTC(SU) и определения координат местоположения Систем в плане.
Принцип действия измерительного модуля системы Лобачевский:
- при измерении скорости движения ТС по видеокадрам в зоне контроля основан на измерении расстояния, пройденного ТС в зоне контроля за измеренный интервал времени;
- при измерении скорости движения ТС радиолокационным методом в зоне контроля, основан на измерении разности частоты высокочастотных сигналов при отражении от движущегося объекта, находящегося в зоне контроля (эффект Доплера);
- при измерении скорости движения ТС на контролируемом участке дороги, основан на измерении интервала времени, за который ТС прошло расстояние между модулями Системы;
- при измерении расстояния до ТС основан на измерении относительных фазовых сдвигов сигналов, отраженных от контролируемого ТС;
- при измерении значений текущего времени и координат основан на приеме и обработке сигналов глобальных навигационных спутниковых систем ГЛОНАСС/GPS с помощью приемника, входящего в состав Систем, автоматической синхронизации шкалы времени Систем с национальной шкалой координированного времени UTC(SU).
- ИМ изготавливаются в четырех модификациях. Модификации отличаются функционалом.«СМ-М» — обеспечивает измерение текущих значений времени, синхронизированных с национальной шкалой координированного времени UTC(SU) и определение координат местоположения Систем в плане;
- «СМ-В» — обеспечивает измерение скорости движения ТС по видеокадрам в зоне контроля в автоматическом режиме, измерение расстояния до ТС, определение текущих значений времени, синхронизированных с национальной шкалой координированного времени UTC(SU) и определение координат местоположения Систем в плане;
- «СМ-Р» — обеспечивает измерение скорости движения ТС радиолокационным методом в зоне контроля в автоматическом режиме, измерение расстояния до ТС, определение текущих
значений времени, синхронизированных с национальной шкалой координированного времени UTC(SU) и определение координат местоположения Систем в плане; - «СМ-К» — обеспечивает измерение скорости движения ТС радиолокационным методом и/или по видеокадрам в зоне контроля в автоматическом режиме, измерение расстояния до ТС, определение текущих значений времени, синхронизированных с национальной шкалой координированного времени UTC(SU) и определение координат местоположения Систем в
плане.
ВС представляет собой внешний модуль, выполненный в пыле-влагозащищенном корпусе или может входит в состав ИМ. ВС включает в себя компьютер и программное обеспечение «Lobachevsky». ВС собирает и обрабатывает данные со всех модулей Системы.
При наличии в составе Системы нескольких модулей ВС назначается один главный сервер. В качестве МВ используются средства измерений утвержденного типа (регистрационные
номера 71822-18, 62427-15 в Федеральном информационном фонде), предназначенные для автоматических измерений нагрузки на ось движущегося ТС; нагрузки на группу осей ТС;
массы ТС; габаритных размеров ТС (длина, ширина, высота); скорости движения ТС; межосевых расстояний ТС; определения количества скатов, осей и колес на оси ТС. МВ должен обеспечивать передачу данных измеряемых параметров через Ethernet.
В качестве ММ используются средства измерений утвержденного типа (регистрационные номера 40331-14, 63313-16, 71764-18 в Федеральном информационном фонде), предназначенные для автоматических измерений метеорологических параметров: скорости и направления воздушных потоков, температуры воздуха, относительной влажности воздуха, атмосферного давления, количества атмосферных осадков, энергетической освещенности. ММ должен обеспечивать передачу данных измеряемых параметров через
Ethernet или интерфейс RS485 или радиомодем стандарта GSM.
Варианты использования системы Лобачевский:
- Стационарный вариант размещения — модули Системы размещаются на опорах, стойках и других элементах обустройства автомобильных дорог;
- Передвижной вариант размещения — модули Системы размещаются на штативах, треногах и т.п., на базе транспортных средств.
Системы имеющие в составе МВ и/или ММ и/или внешний ВС и/или ИМ в модификации СМ-В используются в стационарном варианте исполнения Системы.
При наличие в Системе нескольких ИМ установленных стационарно, в Системе может быть реализована функция измерения скорости движения ТС на контролируемом участке
дороги.
Системы имеют модульную архитектуру и включают в себя измерительный модуль (далее — ИМ) и могут включать модуль вычислительного сервера (далее — ВС), модуль измерения весогабаритных параметров ТС (далее — МВ), модуль измерения метеорологических параметров (далее — ММ).
ИМ представляет из себя моноблок, выполнен в пыле-влагозащищенном корпусе, содержит в себе: радарный блок и/или видео блок, навигационный приемник, блок инфракрасной подсветки, блок питания, и может включать в себя модуль ВС. ИМ обеспечивает измерение скорости движения ТС радиолокационным методом, по видеокадрам в зоне контроля и на контролируемом участке дороги в автоматическом режиме, расстояния до ТС, определения текущих значений времени, синхронизированных с национальной шкалой координированного времени UTC(SU) и определения координат местоположения Систем в плане.
Принцип действия ИМ:
-
— при измерении скорости движения ТС по видеокадрам в зоне контроля основан на измерении расстояния, пройденного ТС в зоне контроля за измеренный интервал времени;
-
— при измерении скорости движения ТС радиолокационным методом в зоне контроля, основан на измерении разности частоты высокочастотных сигналов при отражении от движущегося объекта, находящегося в зоне контроля (эффект Доплера);
-
— при измерении скорости движения ТС на контролируемом участке дороги, основан на измерении интервала времени, за который ТС прошло расстояние между модулями Системы;
-
— при измерении расстояния до ТС основан на измерении относительных фазовых сдвигов сигналов, отраженных от контролируемого ТС;
-
— при измерении значений текущего времени и координат основан на приеме и обработке сигналов глобальных навигационных спутниковых систем ГЛОНАСС/GPS с помощью приемника, входящего в состав Систем, автоматической синхронизации шкалы времени Систем с национальной шкалой координированного времени UTC(SU).
ИМ изготавливаются в четырех модификациях. Модификации отличаются функционалом.
«СМ-М» — обеспечивает измерение текущих значений времени, синхронизированных с национальной шкалой координированного времени UTC(SU) и определение координат местоположения Систем в плане;
«СМ-В» — обеспечивает измерение скорости движения ТС по видеокадрам в зоне контроля в автоматическом режиме, измерение расстояния до ТС, определение текущих значений времени, синхронизированных с национальной шкалой координированного времени UTC(SU) и определение координат местоположения Систем в плане;
«СМ-Р» — обеспечивает измерение скорости движения ТС радиолокационным методом в зоне контроля в автоматическом режиме, измерение расстояния до ТС, определение текущих значений времени, синхронизированных с национальной шкалой координированного времени UTC(SU) и определение координат местоположения Систем в плане;
«СМ-К» — обеспечивает измерение скорости движения ТС радиолокационным методом и/или по видеокадрам в зоне контроля в автоматическом режиме, измерение расстояния до ТС, определение текущих значений времени, синхронизированных с национальной шкалой координированного времени UTC(SU) и определение координат местоположения Систем в плане.
ВС представляет собой внешний модуль, выполненный в пыле-влагозащищенном корпусе или может входит в состав ИМ. ВС включает в себя компьютер и программное обеспечение «Lobachevsky». ВС собирает и обрабатывает данные со всех модулей Системы. При наличии в составе Системы нескольких модулей ВС назначается один главный сервер.
В качестве МВ используются средства измерений утвержденного типа (регистрационные номера 71822-18, 62427-15 в Федеральном информационном фонде), предназначенные для автоматических измерений нагрузки на ось движущегося ТС; нагрузки на группу осей ТС; массы ТС; габаритных размеров ТС (длина, ширина, высота); скорости движения ТС; межосевых расстояний ТС; определения количества скатов, осей и колес на оси ТС. МВ должен обеспечивать передачу данных измеряемых параметров через Ethernet.
В качестве ММ используются средства измерений утвержденного типа (регистрационные номера 40331-14, 63313-16, 71764-18 в Федеральном информационном фонде), предназначенные для автоматических измерений метеорологических параметров: скорости и направления воздушных потоков, температуры воздуха, относительной влажности воздуха, атмосферного давления, количества атмосферных осадков, энергетической освещенности. ММ должен обеспечивать передачу данных измеряемых параметров через Ethernet или интерфейс RS485 или радиомодем стандарта GSM.
Системы могут использоваться в трех вариантах.
Стационарный вариант размещения — модули Системы размещаются на опорах, стойках и других элементах обустройства автомобильных дорог.
Передвижной вариант размещения — модули Системы размещаются на штативах, треногах и т.п.
Мобильный вариант размещения — модули Системы размещаются на борту ТС.
Системы, имеющие в составе МВ и/или ММ и/или внешний ВС и/или ИМ в модификации СМ-В, используются в стационарном варианте исполнения Системы.
При наличии в Системе нескольких ИМ установленных стационарно, в Системе может быть реализована функция измерения скорости движения ТС на контролируемом участке дороги.
Системы в зависимости от исполнения имеют следующее обозначение: ЛОБАЧЕВСКИЙ X X X X X
Типы системы_______________________________________|
Обозначение модификации ИМ:
М — «СМ-М»; В — «СМ-В»; Р — «СМ-Р»;
К — «СМ-К».________________ _______________________
Наличие функции измерения скорости ТС на
контролируемом участке дороги:
0 — модуль отсутствует; 1 — модуль присутствует_________________________
Наличие внешнего модуля ВС:
0 — модуль отсутствует; 1 — модуль присутствует_____________________________
Наличие модуля МВ:
0 -модуль отсутствует; 1 — модуль присутствует__________________________________
Наличие модуля ММ:
0 — модуль отсутствует; 1 — модуль присутствует
На корпусе ИМ и ВС установлены маркировочные таблички, содержащие наименование, модификацию и заводской номер Системы, тип составной части, дату выпуска, торговую марку изготовителя и знак утверждения типа средства измерений.
Нанесение знака поверки на корпуса ИМ и ВС не предусмотрено.
Общий вид ИМ и ВС, места нанесения маркировки, знака утверждения и пломб представлены на рисунках 1 и 2.
а установки пломб
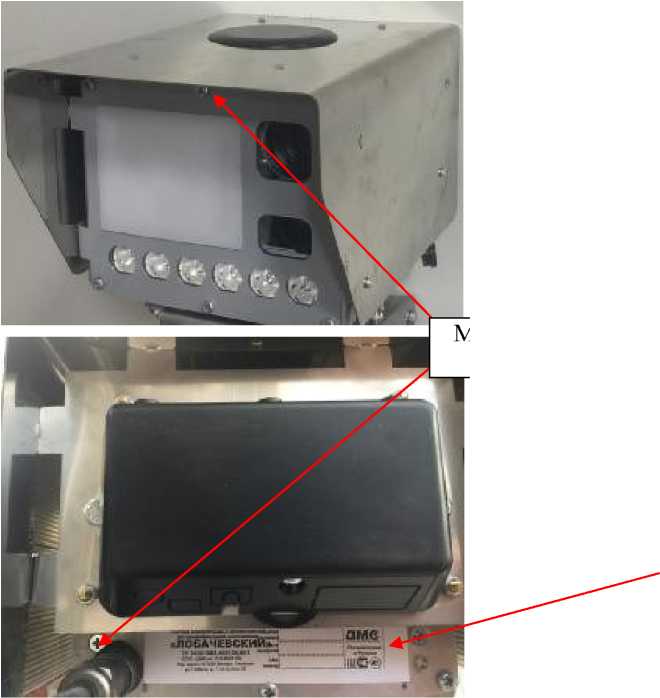
Маркировка и знак утверждения типа
Вид ИМ сзади
Рисунок 1 — Общий вид ИМ модификации «СМ-М», «СМ-В», «СМ-Р», «СМ-К»
Вид ИМ спереди
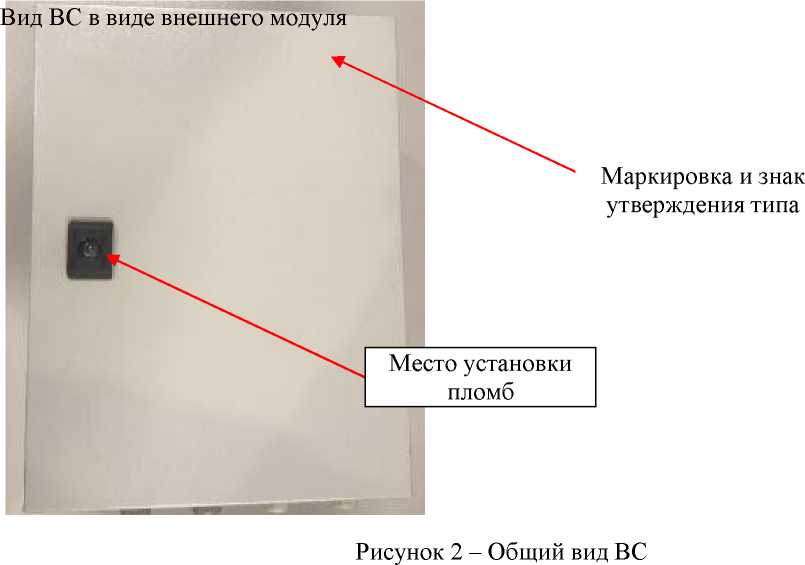
Таблица 2 — Метрологические характеристики
|
Наименование характеристики |
Значение |
|
1 |
2 |
|
Диапазон измерений скорости движения ТС, км/ч: при измерении в зоне контроля:
|
от 1 до 320 от 0 до 350 от 0 до 350 |
Окончание таблицы 2
|
1 |
2 |
|
Пределы допускаемой абсолютной погрешности измерений скорости движения ТС, км/ч: при измерении в зоне контроля: — радиолокационный метод измерения |
±1 |
|
— метод измерения по видеокадрам |
±1 |
|
— при измерении на контролируемом участке дороги |
±1 |
|
Диапазон измерений расстояния от ИМ до ТС, м |
от 1 до 100 |
|
Пределы допускаемой абсолютной погрешности измерений расстояния от ИМ до ТС, м |
±1 |
|
Пределы допускаемой абсолютной погрешности определения текущего значения времени в национальной шкале координированного времени UTC(SU), мс |
±1 |
|
Допускаемые границы абсолютной инструментальной погрешности (при доверительной вероятности 0,95) определения координат местоположения Системы в плане в статическом режиме при геометрическом факторе PDOP не более 3, м |
±3 |
Таблица 3 — Основные технические характеристики
|
Наименование характеристики |
Значение |
|
1 |
2 |
|
Минимальное расстояние контролируемого участка дороги, м |
100 |
|
Габаритные размеры ИМ, мм, не более: |
|
|
— длина |
170 |
|
— ширина |
170 |
|
— высота |
160 |
|
Габаритные размеры внешнего модуля ВС, мм, не более: |
|
|
— высота |
1000 |
|
— ширина |
800 |
|
— глубина |
400 |
|
Масса, кг, не более: — ИМ |
4 |
|
— Внешний модуль ВС |
4 |
|
Условия эксплуатации ИМ и внешнего модуля ВС: — диапазон температуры окружающего воздуха, °C |
от -60 до +65 |
|
— атмосферное давление, гПа |
от 600 до 1100 |
|
— относительная влажность при температуре 35 °C, % |
до 98 |
|
Потребляемая мощность, В^А, не более: — ИМ |
20 |
|
— Внешний модуль ВС |
700 |
Окончание таблицы 3
|
1 |
2 |
|
Степень защиты по ГОСТ 14254-2015: — ИМ — Внешний модуль ВС |
IP 65/IP 67 IP 65 |
|
Параметры электрического питания: ИМ
|
от 8 до 19 от 90 до 300 50 ±1 |
- Описание
- Технические характеристики
- Аксессуары
- Видео
- Настройка
Обучающие видео по настройке ЛБ-700 (42МБ, ZIP) Скачать
Компания «Лобачевский и Ко» представляет новую, соответствующую всем современным тенденциям, версию автоматического брошюровщика ЛБ-700. Машина, прекрасно зарекомендовавшая себя на отечественном и зарубежном рынках в течение 15 лет, предназначена для производства календарей, брошюр и других товаров бумажно-делового ассортимента в промышленных масштабах. Брошюровщик-автомат производит нарезку и обжим металлической спирали Wire-O на предварительно перфорированных блоках толщиной до 10 мм, позволяя одновременно навивать до 5 отрезков спирали с заданными интервалами. В качестве дополнительной опции предлагается устройство вставки ригеля (длиной до 40 см). Электромеханический принцип устройства не предусматривает использования компрессора, что делает автоматический брошюровщик более экономичным в эксплуатации и простым в техническом обслуживании.
Средняя производительность переплётчика-брошюровщика ЛБ-700 варьируется от 600 до 1000 циклов в час, в зависимости от типа продукции, рабочих условий и квалификации оператора.
2015 год, без преувеличения, стал годом второго рождения машины, так как наши инженеры полностью переработали некоторые узлы и механизмы, внедрив несколько интересных инноваций. Все этапы настройки и управления машиной производятся с помощью сенсорного дисплея в режиме диалога по интуитивно понятному оператору алгоритму, что помогает существенно упростить работу и сократить время обучения персонала. Единственный параметр, сохранивший механическую регулировку — это глубина обжима. Новая система упоров рабочего стола позволяет предельно точно выставлять обжимаемый блок относительно крючков спирали, что даёт возможность навивать бумажные блоки с выступающей подложкой, а также сокращает время перехода на другой рабочий формат.
Плюсы машины нового образца:
- эффективное и простое в управлении устройство удаления бумаги, которым оснащен держатель бобины.
- датчик проволоки можно регулировать по высоте;
- изменился дизайн направляющего лотка для проволоки, которые изготавливается сейчас из металлических материалов с немагнитными свойствами;
- механизм вставки ригеля подвергся практически полной конструктивной и технологической модернизации;
- добавлена электромеханическая система подачи ригелей, которая гарантирует равномерную подачу и абсолютно точную установку ригеля на предназначенное место. Вставка ригеля стала теперь еще более надёжной, удобной и эффективной.
Инструкции по настройке брошюровщика ЛБ-700 и по установке устройства вставки ригеля можно скачать, нажав на соответствующие кнопки слева от изображения машины.
Электрический брошюровщик ЛБ-700, несомненно, займёт достойное место в технологическом парке Вашей типографии, помогая Вам выполнять заказы любых объёмов в самые сжатые сроки. Качество в сочетании с доступными ценами и высокой функциональностью техники — вот главные преимущества ООО «Лобачевский и Ко», благодаря которым с нами успешно сотрудничают передовые типографии и компании!