Навигационная Аппаратура Тна-4. Техописание И Инструкция По Эксплуатации
Название: Навигационная аппаратура ТНА — 4. Формат: PDF Инструкция по эксплуатации предназначена для руководства при.
Специальности 411100 « Эксплуатация и ремонт систем. Beличины цена одного большого деления соответствует 0 — 10, а малого 0 — 05 или. 18′. навигационной аппаратуры ТНА — 4 и предназначена для непрерывного.
РБР на РЛС войск ПВО Сухопутных войск. Техническое описание и инструкция по эксплуатации [Воениздат] Навигационная аппаратура ТНА — 4.
ДАТЬ ОБЪЯВЛЕНИЕ НА ДОСКУ ОБЪЯВЛЕНИЙ! Навигационная аппаратура ТНА — 4. Техническое описание и инструкция по эксплуатации. Часть 1.

Инструкция по эксплуатации предназначена для руководства при эксплуатации навигационной аппаратуры ТНА-4 и её модификаций, устанавливаемых на наземных подвижных объектах.
ТНА танковая навигационная аппаратура. ТО техническое. ТНА — 4 -1 к маршу в соответствии с инструкцией по эксплуатации на нее.
Инструкция по эксплуатации предназначена для руководства при эксплуатации навигационной аппаратуры ТНА — 4 и её модификаций, Техническое описание предназначено для изучения аппаратуры и содержит.
ТО и ИЭ и паспорт №4454 ТО,ИЭ и П. 1973( pdf)9.61=ЭхВася работа http:// yadi.sk/d/ ТНА — 4. Навигационная аппаратура ТНА — 4. Инструкция по эксплуатации ТНА — 4. Инструкция по эксплуатации ПБ1.590.021 ИЭ.
Комментарии (0)Просмотров (170)
281

Третья задачарешается
аппаратурой с координатором цели.
Зная текущие координаты машины и
дирекционный угол ее продельной оси,
измеряют дальномером расстояниеSцдо цели и угол визирования на нее с
помощью угломерного устройства
машины. Эти данные вводят в координатор
цели.
Задача решается по математическим
зависимостям:
Х ц
ц
= ХТ
+ ∆Хц
= ХТ + Sц
cos aц
Yц
= YТ
+ ∆Yц
= YТ +
Sц
sin aц
где aц
= aТ
+ βвиз
Устройство навигационной аппаратуры с координатором.
Навигационная аппаратура с координатором
состоит из:
-
курсовой системы (рис. 87),
-
датчика пути,
-
координатора
-
курсоуказателя.
В некоторых ее модификациях имеются
индикаторный планшет и координатор
цели. В комплект навигационной аппаратуры
входят также вспомогательные приборы
и инструменты.
Курсовая система состоит из:
-
гироскопического курсоуказателя,
-
пульта управления
-
преобразователя тока.
Гироскопический курсоуказательпредназначен для измерения углов
поворота машины. Основу его составляют
трехстепенной вакуумный гироскоп,
устройства азимутальной и горизонтальной
коррекции и двухканальный сельсин-датчик
следящей системы передачи величины
дирекционного угла в координатор.
Компенсация ухода главной оси гироскопа
относительно земных ориентиров
вследствие вращения Земли в
гирокурсоуказателе осуществляется
устройством азимутальной коррекции.
Напряжение, подаваемое на обмотку
корректора, вызывает прецессию
наружной рамки гироскопа относительно
оси Z, по величине и
направлению противоположную фактическому
уходу главной оси гироскопа.
Крутящий момент М, компенсирующий уход
главной оси гироскопа, связан с
географической широтой зависимостью
М = Н W
sin
φ,
где
H— постоянная
величина кинематического момента
гироскопа;
W— угловая скорость
вращения Земли;
φ— географическая широта места
эксплуатации машины.
С изменением географической широты
места изменяется и крутящий момент. Он
создается электродвигателем в
гирокурсоуказателе автоматически после
широтной балансировки, осуществляемой
с пульта управления.
Устройство горизонтальной коррекции
состоит из жидкостного маятникового
переключателя и моментного электродвигателя
горизонтальной коррекции.
Ротор сельсина-датчика жестко связан
с наружной рамкой гироскопа, а статор
— с корпусом машины. Это обеспечивает
измерение углов поворота машины.
Для обеспечения стабильности электрических
и механических параметров в
гирокурсоуказателе имеется система
обогрева, которая автоматически
включается при температуре ниже 5°С.
Пульт управленияпредназначен
для настройки курсовой системы. Он имеет
два потенциометра азимутальной коррекции:
потенциометр ШИРОТА со шкалой 5 широтной
балансировки, проградуированной в
градусах северной широты от 0 до 90°,
и поправочный потенциометр
электробалансировки (ЭЛ.Б) с
двухсторонней шкалой 3, имеющей по 200
делений в обе стороны (цена деления
0-04). Поправочный потенциометр служит
для уточнения широтной балансировки
гирокурсоуказателя.
Датчик пути— электромеханический
прибор, состоящий из индуктивного
преобразователя и двух
формировательно-усилительных каналов.
Он соединен с ходовой частью машины
гибким валиком. В движении энергия
вращающегося валика преобразуется
датчиком в электрические импульсы.
Частота следования пропорциональна
скорости движения. Импульсы с определенной
дискретностью и знаком (при движении
вперед или назад) поступают в координатор
на устройство корректуры пути, где в
зависимости от установленной величины
корректуры число их изменяется.
Откорректированные таким образом
электрические импульсы передаются в
координатор на входное устройство
разложения.
В некоторых модификациях аппаратуры
устанавливают электронные датчики
пути. Электронный датчик – радиотехническое
устройство, обеспечивающее определение
пройденного пути без кинематической
связи с ходовой частью машины. В состав
датчика входят высокочастотное
устройство, станция усиления,
преобразователь, пульт управления и
датчик крена машины.
Принцип работы датчика основан на
использовании эффекта Доплера,
который заключается в изменении частоты
сигнала при относительном перемещении
источника и приемника излучение.
Высокочастотное устройство излучает
сигналы определенной частоты направленные
узким пучком к поверхности земли, и
принимает сигналы, отраженные от ее
поверхности. Если машина неподвижна,
частота принятого сигнала равна частоте
из; лученного сигнала. В движении частота
отраженного от земной поверхности
сигнала отличается от частоты излученного
датчиком сигнала на некоторую
величину, пропорциональную скорости
движения машины. В станцию усиления
кроме импульсов отраженных от земной
поверхности, поступают импульсы от
датчика крена машины, то есть данные о
рельефе местности. Сформированный
сигнал о пройденном машиной пути
передается на преобразователь, где
он преобразуется в угол поворота
выходного вала датчика, который связан
гибким валиком с координатором.
Электронный датчик используется при
скорости движения свыше 3 км/ч. При
меньшей скорости датчик отключается и
данные о пройденном пути поступают
в координатор от электромеханического
датчика.
Координатор — счетно-решающий
прибор, непрерывно вырабатывающий в
пути прямоугольные координаты
местоположения и курс машины, а также
дирекционный угол направления на
пункт назначения и оставшегося до него
расстояния по приращениям координат∆Х,∆У. .
На передней панели координатора размещены
органы управления и индикации: шкалы
7 (рис. 88) счетчиков координат ХиУ; шкалы 6 приращений (разностей)
координат∆Х,∆Ушкалы
10 и 9 грубого и точного отсчета дирекционного
угла (курса машины); диск 8 с указателем
(индексом) дирекционного угла на
пункт назначения; шкала 11 корректуры
пути; включатель 15 СИСТЕМА, который
служит для включения всей системы
навигационной аппаратуры.

Рис. 88. Координатор:
1, 2, 3 — рычажки установки координат; 4 —
рычажок установки приращений; 5 — рукоятка
установки координат и приращений
координат; 6 — шкалы и барабаны приращений
координат; 7 — счетчики координат; 8 — диск
с указателем (индексом дирекционного
угла на пункт назначения; 9 — курсовая
шкала грубого отсчета; 10 — курсовая
шкала точного отсчета; 11-шкала корректуры
пути; 12 — рукоятка установки корректуры
пути; 13 — переключатель масштабов; 14 —
кнопка запуска для контроля работы
аппаратуры; 15 — тумблер СИСТЕМА; 16 —
тумблер .КОНТРОЛЬ -РАБОТА для переключения
аппаратуры в разные режимы работы; 17 —
рукоятка установки курса
Координатор имеет два режима работы
—решения навигационных задач в
движении и контроля работы в неподвижной
машине. Соответствующий режим работы
РАБОТА—КОНТ. РОЛЬ устанавливают
переключателем 16. Кнопка 14 ЗАПУСК
обеспечивает включение режима контроля.
Переключателем 13 устанавливают масштаб
счетчиков-А: и у на цену деления 1 или
10-м.
Шкальные механизмы координат представляют
собой счетчики барабанного типа. Они
позволяют вводить и считывать координаты,
выраженные пятизначными числами. Цена
одного деления правого барабана в режиме
РАБОТА составляет 10м, а в режиме КОНТРОЛЬ
— 1м.
Шкальные механизмы приращений (разностей)
координат состоят из неподвижных шкал
с ценой деления 10 км и боковых барабанов,
шкалы которых имеют цену деления 200 м.
По правому барабану считывают
положительные значения приращений
координат, а по левому — отрицательнее.
Координаты и приращения координат
устанавливают ручкой 5 установки
координат при нажатии на соответствующие
Шкалы ввода и отсчета дирекционного
угла (курса машины) круглые. Шкала 9
грубого отсчета неподвижная с вращающимся
указателем. Цена деления шкалы 0-50 Шкала
/0 точного отсчета дирекционного угла
подвижная. Один ее оборот равен 1-00, цена
деления 0-0), Дирекционный угол устанавливают
ручкой 17.
Шкала корректуры пути круглая, имеет
46 делений с оцифровкой от —13 до +10%,
пена деления 0,5%. По этой шкале с помощью
ручки 12 вводят корректуру пути.
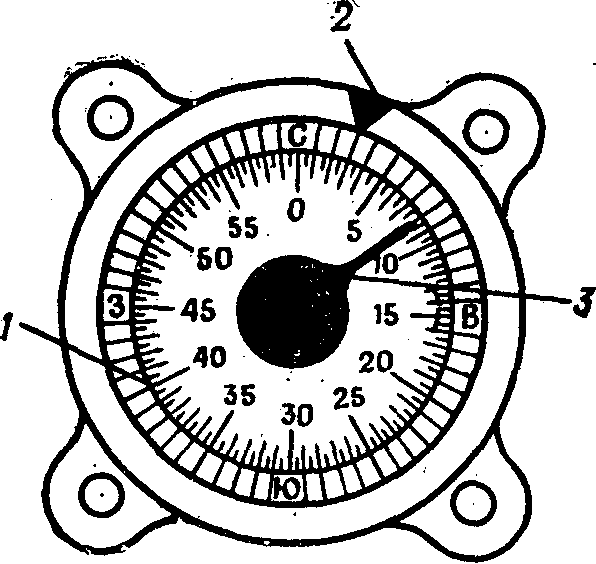
Рис. 89. Курсоуказатель:
1 — шкала; 2 — поворотное кольцо с индексом;
3 — стрелка
Курсоуказательпредназначен
для дублирования показаний шкалы
грубого отсчета дирекционного угла
продольной оси машины. Он используется
механиком-водителем при вождении машины
по заданному курсу.
Шкала (рис. 89) курсоуказателя имеет 120
делений, цена деления 0-50. Для
выдерживания заданного курса индекс
поворотного кольца 2 устанавливают
против соответствующего деления шкалы.
При движении по курсу стрелка 3 должна
находиться против индекса.
Индикаторный планшет (рис. 90)
предназначен для индикации указания
местоположения машины на топографической
карте перекрестием визирных (подвижных)
нитей. Он рассчитан на работу с
топографическими картами масштабов
1:50000 и 1:100000. В него можно вкладывать
небольшую (2—3 листа) склейку карт,
сложенную по размерам планшета.
Начальная установка координат ХиУместоположения машины и
установка нитей осуществляются ручками
ввода координатХиУ. В
планшете предусмотрено устройство
ввода поправки в координаты,
вырабатываемые координатором. Оно
состоит из кнопок ПОПРАВКАX,
ПОПРАВКАYи тумблера ЗНАК
ПОПРАВКИ. Установив тумблером
соответствующий знак (+ или ), нажимают
на кнопки и выводят визирные нити так,
чтобы их перекрестие было над точкой
местоположения машины на карте. При
этом на шкалах счетчиков координат
координатора синхронно устанавливаются
координаты точки местоположения
машины.
Координатор целивместе с
координатором навигационной аппаратуры
служит для вычисления прямоугольных
координат разведанных целей по их
полярным координатам (расстояниям
до целей и углам визирования на них).Таким
образом, координатор цели решает прямую
геодезическую задачу. Расстояния до
целей измеряются на местности с
использованием дальномера, а углы
визирования на разведанные цели— с
помощью угломерного устройства.
Местоположение машины принимается
за полюс, а полярной осью служит
продольная ось машины. Точность
определения прямоугольных координат
целей зависит от точности определения
координат полюса, а также от точности
определения полярных координат целей.

Рис. 90. Индикаторный планшет:
1 — крышка; 2, 5 — винты; 3, 6 — гайки; 4 —
визирные нити; 7 — патроны подсветки;
8 — ручка ввода координаты Х; 9 — ручка
регулирования освещенности карты; 10 —
кнопка поправки Х; II—
ручка переключения масштаба; 12 —
переключатель ВКЛЮЧЕНИЕX,
У; 13 — ограничитель; 14 — ручка ввода
координаты у
Координатор целииспользуется
только в неподвижной машине. Вначале
рукоятками УСТАНОВКАX,Yи УСТАНОВКА а устанавливают
координаты и дирекционный угол, считанные
со шкал координатора. Затем измеряют
угол визирования на цель (Р) и устанавливают
его рукояткой УСТАНОВКА авиа. Переключатель
РОД РАБОТЫ устанавливают в режим
вычисления прямоугольных координат
цели. Измеренное дальномером расстояние
до цели вводится рукояткой УСТАНОВКА
5Ц. Скорость ввода расстояния регулируется
специальным переключателем БЫСТРО
— МЕДЛЕННО. Переключатель ВВОД 5Ц —
СБРОС 5Ц устанавливают в соответствующий
режим (+ или -). Координаты цели считывают
со шкалX,Yкоординатора цели.
Назначение,
состав, технические характеристики
ТНА-4
Назначение
ТНА-4-1
является счетно-решающей системой,
предназначенной для:
-
автоматической
выработки и индикации координат
движущегося объекта; -
выработки
дирекционного угла продольной оси
объекта; -
выработки
дирекционного угла на пункт назначения; -
индикации
местоположения объекта на топографической
карте в системе координат Гаусса-Крюгера.
Состав
В
состав ТНА-4-1 входят следующие приборы
и инструменты:
-
гирокурсоуказатель
(ГКУ); -
пульт
управления (ПУ); -
преобразователь
тока ПТ-200Ц; -
механический
датчик скорости; -
координатор;
-
курсоуказатель;
-
планшет
индикаторный; -
хордоугломер
(в чехле); -
циркуль-измеритель
полевой (в чехле).
Технические
характеристики ТНА-4-1:
-
среднеквадратические
относительные когерентности определения
координат объекта при его движении со
скоростями до 100 км/ч без переориентирования
и абсолютные предельные погрешности
удержания дирекционного угла не
превышают значении, указанных в таблице
4
Таблица
4
предельные
погрешности удержания дирекционного
угла
|
Погрешность |
|||||||
|
В |
В |
В |
В |
||||
|
Координат, |
Дирекционного |
Координат, в |
Дирекционного |
Координат, в |
Дирекционного |
Координат, в |
Дирекционного |
|
0,6-0,8 |
20 |
0,9 |
41 |
1,1 |
58 |
1,25 |
80 |
-
погрешность
вычисления координат в режиме встроенного
контроля не более 5 м; -
погрешность
дистанционной передачи дирекционного
угла координатора, на курсоуказатель
не более 0-50; -
инструментальная
координатная погрешность отображения
местоположения объекта на топографической
карте не более 1 мм; -
аппаратура
обеспечивает введение поправок в
счетчики координатора по контурным
точкам трассы с управлением от планшета; -
аппаратура
обеспечивает ввод поправок на юз и
пробуксовку движущегося объекта в
диапазоне от +12% до -10% от величины
пройденного пути; -
время
готовности аппаратуры к работе 13 мин.,
а при температуре окружающей среды
ниже +200
С – 20 мин.; -
время
непрерывной работы аппаратуры с заданной
точностью без переориентирования 7
часов; -
питающее
напряжение 36 В 400 Гц.
Взаимодействие
элементов аппаратуры ТНА-4-1 по структурной
схеме
Информация
пройденном пути поступает от ходовой
части объекта через гибкий валик с ценой
одного оборота 1,6 м на механический
датчик скорости (МДС) (рис.87). В МДС эта
информация преобразуется в две
последовательности импульсов, несущих
информацию о приращении пути и его
знаке. Частота импульсов пути
пропорциональна скоростям движения
объекта, а их количество пропорционально
пройденному пути.
Эти
две последовательности импульсов по
двум каналам с МДС поступают в устройство
корректуры пути координатора, где
происходит их формирование с учетом
дорожных условий. В зависимости от
очередности следования импульсов по
каналам в устройстве корректуры пути
вырабатывается сигнал направления
движения объекта (вперед или назад),
который поступает в устройство
переключения.
Импульсы
одного из каналов используются в
координаторе в качестве импульсов пути
S, поступающих в устройство преобразования.
В зависимости от дорожных условий (юз,
пробуксовка) количество импульсов пути
корректируется в устройстве преобразования
в зависимости от положения рукоятки
УСТАНОВКА КОРРЕКТУРЫ.
Информация
об изменении дирекционного угла
продольной оси движущегося объекта
вырабатывается в курсовой системе
«Маяк-2», состоящей из гирокурсоуказателя
(ГКУ), пульта управления и преобразователя
тока.
ГКУ
предназначен для выработки информации
об изменении дирекционного угла
продольной оси объекта.
Пульт
управления предназначен для регулирования
ГКУ по географической широте и величине
ухода показаний дирекционного угла.
Преобразователь
тока обеспечивает питание всей аппаратуры
переменным током напряжения 36 В частотой
400 Гц.
Информация
об изменении дирекционного угла объекта
с ГКУ поступает в устройства отработки
дирекционного угла объекта координатора.
Координатор
представляет собой счетно-решающий
индикаторный прибор, предназначенный
для вычисления и индикации координат
движущегося объекта, дирекционного
угла объекта и дирекционного угла на
пункт назначения.
Устройство
отработки дирекционного угла объекта
представляет собой следящую систему,
механически связанную с устройством
преобразования и устройством переключения.
В
устройстве отработке дирекционного
угла объекта вырабатывается сигнал для
курса указания, являющегося индицирующим
прибором.
Курсоуказатель
представляет собой следящую систему
одноканального типа. Его выходным
устройством является стрелочный
указатель, указывающий дирекционный
угол объекта.
Устройство
преобразования имеет механический вход
по дирекционному углу объекта и вход
по сигналам пути
Оно
является основным устройством координатора
и осуществляет операцию разложения
элементов пути на составляющие вдоль
координатных осей. Так как область
измерения дирекционного угла ограничена
от 00
до 900,
то устройство преобразования вырабатывает
только положительные значения элементов,
разложения пути, равные:
ΔSi
cosα/
ΔSi
sinα/
Для
обеспечения непрерывности изменения
синусной и косинусной функции дирекционного
угла при изменении квадрантов, в которых
движется объект, служит устройство
переключения координатора. На него
поступает информация, выработанная в
устройстве преобразования и дирекционный
угол объекта, выработанный в устройстве
отработки дирекционного угла объекта.
Устройство
переключения обрабатывает поступившую
на него информацию, определяя квадрант
происшедшего разложения элемента пути
и знаки приращений в соответствии с
квадрантом дирекционного угла объекта.
С
выхода устройства переключения информация
в виде последовательностей дискретных
величин:
ΔХi=/ΔSi
cosα׳//
ΔУi=/ΔSi
sinα//
поступает
в устройство индикации координат, где
происходит суммирование этих сигналов.
Устройство индикации координат
вырабатывает также информацию о разностях
координат между пунктом назначения
местоположения объекта, которая поступает
на вход устройства определения
дирекционного угла на пункт назначения.
Это
устройство производит операцию по
определению дирекционного угла на пункт
назначения по данным, поступающим с
устройства индикации координат.
Приращения
координат Х , У с устройства индикации
координат поступает на индикаторный
планшет, на топографической карте
которого с помощью визирных нитей Х и
У индицируется текущее местоположение
движущегося объекта.
Блок
питания координатора обеспечивает
стабилизированными напряжениями -4В,
+4В и выпрямленными напряжениями -6,3В,
+6,3В электронные блоки координатора.
Соседние файлы в папке РЛС
- #
- #
- #
- #
- #
- #
Слайды и текст этой презентации
Слайд 1
ОБЩЕВОЙСКОВАЯ КАФЕДРА ВФ ГрГУ
специальная подготовка
Тема 4. Навигационное
оборудование.
Занятие 1 Назначение, общее устройство, тактико-технические характеристики
навигационного оборудования. Размещение блоков в машине. Порядок подготовки к работе.

Слайд 2
Вариант №1
Радиолокация — это_____________________
Назначение, ТТХ ПСНР_____
Назначение, ТТХ
ДКРМ_____
Назначение , ТТХ радиостанции Р – 123
_______
Назовите типы антенн используемых для работы средств связи БРМ
Вариант №2
Эффект Доплера___________________
ПСНР состоит из:__________
Назначение, общее устройство ЭРРС – 1 _________________
Назначение, ТТХ радиостанции Р – 130________
Назовите типы антенн используемых для работы средств связи БРМ

Слайд 3Цели занятия:
1. Довести до обучаемых назначение, общее
устройство, тактико-технические характеристики навигационного оборудования.
2. Изучить порядок
размещения блоков в машине, а также алгоритм действий по подготовке к работе навигационного оборудования.

Слайд 4Литература рекомендуемая для подготовки и проведения занятия:
«Навигационная
аппаратура ТНА – 4Б», техническое описание и
инструкция по эксплуатации;
2. Пособие по тактической, специальной, огневой и инженерной подготовке.

Слайд 5Вопрос № 1.Назначение, устройство, принцип работы и
размещение приборов навигационного оборудования в машине.

Слайд 6
Навигационная аппаратура ТНА-4 является счетно-решающим комплексом, устанавливаемым
на наземных подвижных объектах и предназначенным для
непрерывного автоматического определения и индикации координат и дирекционного угла движущегося объекта, дирекционного угла объекта на пункт назначения, непрерывной автоматической индикации местоположения объекта на топографической карте.

Слайд 7Принцип действия аппаратуры основан на разложении в
процессе движения объекта элементарных отрезков пути, с
учетом текущего дирекционного угла, на две составляющие по координатным осям и последующем алгебраическом суммировании этих составляющих.
Принцип действия ТНА-4Б

Слайд 8
Дискретность текущих координат
10м или 1м.
Среднеарифметическая ошибка выработки текущих координат по каждой координате в зависимости от величины пройденного пути и за время работы без переориентирования в течение 7 часов работы, при скоростях движения объекта до 110 км/ч. не более 1,3%
Ошибка выработки координат в режиме встроенного контроля
не более 5 м.
Ошибка установки и считывания показаний дирекционного угла объекта по шкале точного отсчета координатора 1 д.у.
Диапазон работы от минус 50 до плюс 50о С.
Ошибка установки и считывания разностей координат пункта назначения и места положения объекта 200 м.
Ошибка удержания дирекционного угла объекта аппаратурой за 1 ч работы не более 00-34
Время готовности аппаратуры к работе., при температуре окружающей среды ниже минус 20оС – 20 мин. 13 мин
Технические характеристики

Слайд 10Курсовая система «Маяк»
гирокурсоуказатель
преобразовательПТ-200Ц
пульт управления

Слайд 11 Курсовая система «Маяк» предназначена для непрерывного
определения приращений дирекционного угла объекта и передачи
информации об их величине и знаке в координатор
Состоит из:
гирокурсоуказатель (Г);
пульт управления (А);
преобразователь ПТ-200Ц-Ш (П).
Курсовая система «Маяк»
Слайд 12
Датчик пути предназначен
для преобразования угла поворота вала ввода пути,
связанного с ходовой частью объекта, в электрический сигнал, несущий информацию о приращении пути и его знаке.
Датчик пути выполнен в виде закрытого брызгозащищенного блока. Через корпус датчика пути проходит сквозной валик, на котором находится зубчатое колесо. В местах выхода валика на корпусе установлены соединительные втулки, позволяющие установить датчик пути в разрыв гибкого вала объекта.
Датчик пути
Слайд 13Координатор предназначен для вычисления и индикации координат
движущегося объекта, дирекционного угла на пункт назначения,
а также дирекционного угла объекта.

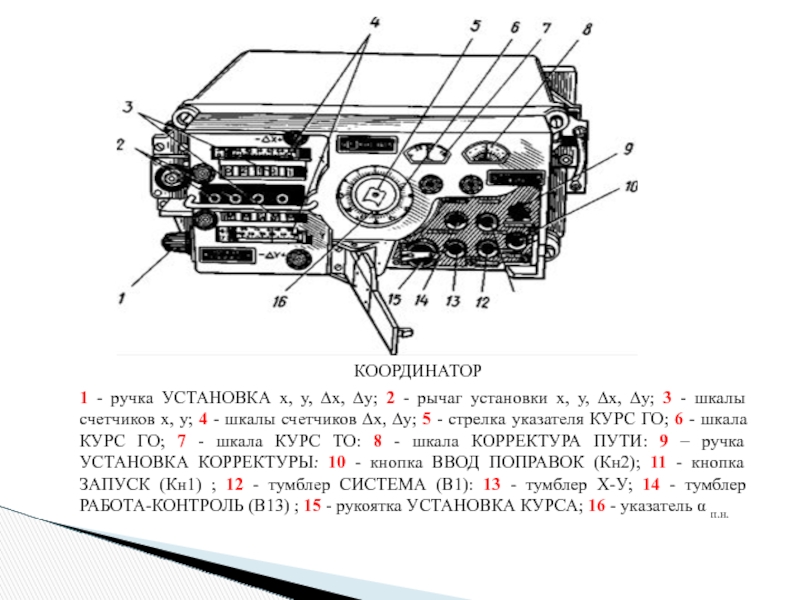
Слайд 16 КООРДИНАТОР
1 — ручка УСТАНОВКА х, у,
∆х, ∆у; 2 — рычаг установки х,
у, ∆х, ∆у; 3 — шкалы счетчиков х, у; 4 — шкалы счетчиков ∆х, ∆у; 5 — стрелка указателя КУРС ГО; 6 — шкала КУРС ГО; 7 — шкала КУРС ТО: 8 — шкала КОРРЕКТУРА ПУТИ: 9 – ручка УСТАНОВКА КОРРЕКТУРЫ: 10 — кнопка ВВОД ПОПРАВОК (Кн2); 11 — кнопка ЗАПУСК (Кн1) ; 12 — тумблер СИСТЕМА (В1): 13 — тумблер Х-У; 14 — тумблер РАБОТА-КОНТРОЛЬ (В13) ; 15 — рукоятка УСТАНОВКА КУРСА; 16 — указатель α п.н.
Слайд 17Устройство корректуры пути предназначено для приведения сигналов
пути с масштабом 26,7 см, приходящих с
МДП или ЭСП, к масштабу 1 м и корректировки их в пределах от +10 до -13%.
Устройство корректуры пути

Слайд 18предназначен для непрерывной индикации местоположения движущегося объекта
на топографической карте. Планшет обеспечивает работу с
топографическими картами масштабов 1: 50000, 1:100000.
Планшет состоит из двух одинаковых приводов осуществляющих перемещение визирных нитей в двух взаимно перпендикулярных направлениях.
Перекрестие визирных нитей определяет местонахождения объекта на топографической карте вставленной в планшет. Начальная установка координат X, У осуществляется ручками УСТАНОВКА X , УСТАНОВКА Y движение с которых через муфты, редукторы 3, 6, дифференциалы 4, 5 и редукторы 7, 8 передается на винты построительной части.
Планшет индикаторный
Слайд 20Курсоуказатель предназначен для индикации дирекционного угла объекта,
поступающего с координатора

Слайд 22Включение аппаратуры
Включение аппаратуры проводите только на стоянке
объекта. Для этого снять чехол с координатора
и установить органы управления приборов аппаратуры в следующие положения:
на координаторе:
тумблер СИСТЕМА в положение ОТКЛ;
тумблер РАБОТА-КОНТРОЛЬ в положение РАБОТА;
тумблер Х-У в произвольное положение;
шкалу КОРРЕКТУРА ПУТИ с помощью ручки УСТАНОВКА КОРРЕКТУРЫ в положение, соответствующее последнему значению, записанному в паспорте на аппаратуру;
на планшете индикаторном:
микротумблер ВКЛ X, У во включенное положение;
переключатель МАСШТАБ в положение, соответствующее масштабу установленной в прибор карты;
на пульте управления при откинутой крышке проверить положение шкалы ШИРОТА и, при необходимости, приведите рукояткой в соответствие с широтой местоположения объекта;
тумблер установить во включенное положение.
Для включения аппаратуры тумблер СИСТЕМА координатора установить в положение ВКЛ, при этом загораются лампы подсветки шкал приборов. За время не более 8 мин. после включения загорается зеленая или желтая лампа пульта управления.
Аппаратура готова к работе через 13 (20) мин. после включения. Для выключения аппаратуры тумблер СИСТЕМА координатора установить в положение ОТКЛ.
Слайд 23Подготовка исходных данных
Подготовку исходных данных целесообразно проводить
заблаговременно. Она заключается в определении координат исходного
пункта маршрута Xп.н., Yп.н. дирекционного угла на ориентир αор., разностей координат пункта назначения и исходного пункта ΔXп.н.., ΔYп.н.
В качестве исходного пункта следует выбирать контурные точки местности (пункты государственной геодезической сети, памятники, мосты, железнодорожные переезды, специальные точки в постоянных парках и т.д.).
При использовании в качестве исходного пункта пунктов государственной геодезической сети их координаты могут быть взяты из каталога координат геодезических пунктов или с топографической карты.
При использовании в качестве исходного пункта других контурных точек их координаты определяйте по карте масштаба 1: 25000 или, в крайнем случае, масштаба
1: 50000 с помощью циркуля измерителя и поперечного масштаба хордоугломера (рис.23) по следующей методике:
найдите исходный пункт на карте;
запишите значение километровой линии, образующей нижнюю сторону квадрата, в котором расположен исходный пункт;
измерьте измерителем расстояние по перпендикуляру от исследуемого пункта до нижней километровой линии;
поставьте на 0 поперечного масштаба хордоугломера правую иглу измерителя;
запишите ближайшее правое от левой иглы измерителя значение поперечного масштаба хордоугломера;
подвиньте измеритель вверх таким образом, чтобы правая игла скользила по нулевой вертикальной линии хордоугломера. Левая игла при этом должна двигаться строго на одном уровне с правой иглой;
перемещайте измеритель до тех пор, пока левая игла не пересечет вертикальную наклонную линию;
прибавьте это значение к ранее записанному значению.
Слайд 24
ОБЩЕВОЙСКОВАЯ КАФЕДРА ВФ ГрГУ
специальная подготовка
Тема 4. Навигационное
оборудование.
Занятие 1 Назначение, общее устройство, тактико-технические характеристики
навигационного оборудования. Размещение блоков в машине. Порядок подготовки к работе.

Слайд 1
ОБЩЕВОЙСКОВАЯ КАФЕДРА ВФ ГрГУ
специальная подготовка
Тема 4. Навигационное оборудование.
Занятие

1 Назначение, общее устройство, тактико-технические характеристики навигационного оборудования. Размещение
блоков в машине. Порядок подготовки к работе.
Слайд 2
Вариант №1
Радиолокация — это_____________________
Назначение, ТТХ ПСНР_____
Назначение, ТТХ ДКРМ_____
Назначение

, ТТХ радиостанции Р – 123 _______
Назовите типы
антенн используемых для работы средств связи БРМ
Вариант №2
Эффект Доплера___________________
ПСНР состоит
из:__________
Назначение, общее устройство ЭРРС – 1 _________________
Назначение, ТТХ радиостанции Р – 130________
Назовите типы антенн используемых для работы средств связи БРМ
Слайд 3
Цели занятия:
1. Довести до обучаемых назначение, общее устройство,

тактико-технические характеристики навигационного оборудования.
2. Изучить порядок размещения блоков в
машине, а также алгоритм действий по подготовке к работе навигационного
оборудования.
Слайд 4
Литература рекомендуемая для подготовки и проведения занятия:
«Навигационная аппаратура

ТНА – 4Б», техническое описание и инструкция по эксплуатации;
2.
Пособие по тактической, специальной, огневой и инженерной подготовке.
Слайд 5
Вопрос № 1.Назначение, устройство, принцип работы и размещение

приборов навигационного оборудования в машине.
Слайд 6
Навигационная аппаратура ТНА-4 является счетно-решающим комплексом, устанавливаемым на

наземных подвижных объектах и предназначенным для непрерывного автоматического определения
и индикации координат и дирекционного угла движущегося объекта, дирекционного угла
объекта на пункт назначения, непрерывной автоматической индикации местоположения объекта на топографической карте.
Слайд 7
Принцип действия аппаратуры основан на разложении в процессе

движения объекта элементарных отрезков пути, с учетом текущего дирекционного
угла, на две составляющие по координатным осям и последующем алгебраическом
суммировании этих составляющих.
Принцип действия ТНА-4Б
Слайд 8
Дискретность текущих координат

10м или 1м.
Среднеарифметическая ошибка выработки текущих
координат по каждой координате в зависимости от величины пройденного пути и за время работы без переориентирования в течение 7 часов работы, при скоростях движения объекта до 110 км/ч. не более 1,3%
Ошибка выработки координат в режиме встроенного контроля
не более 5 м.
Ошибка установки и считывания показаний дирекционного угла объекта по шкале точного отсчета координатора 1 д.у.
Диапазон работы от минус 50 до плюс 50о С.
Ошибка установки и считывания разностей координат пункта назначения и места положения объекта 200 м.
Ошибка удержания дирекционного угла объекта аппаратурой за 1 ч работы не более 00-34
Время готовности аппаратуры к работе., при температуре окружающей среды ниже минус 20оС – 20 мин. 13 мин
Технические характеристики
Слайд 10
Курсовая система «Маяк»
гирокурсоуказатель

преобразовательПТ-200Ц
пульт управления
Слайд 11
Курсовая система «Маяк» предназначена для непрерывного определения

приращений дирекционного угла объекта и передачи информации об их
величине и знаке в координатор
Состоит из:
гирокурсоуказатель (Г);
пульт управления (А);
преобразователь ПТ-200Ц-Ш (П).
Курсовая система «Маяк»
Слайд 12
Датчик пути предназначен для

преобразования угла поворота вала ввода пути, связанного с ходовой
частью объекта, в электрический сигнал, несущий информацию о приращении пути
и его знаке.
Датчик пути выполнен в виде закрытого брызгозащищенного блока. Через корпус датчика пути проходит сквозной валик, на котором находится зубчатое колесо. В местах выхода валика на корпусе установлены соединительные втулки, позволяющие установить датчик пути в разрыв гибкого вала объекта.
Датчик пути
Слайд 13
Координатор предназначен для вычисления и индикации координат движущегося

объекта, дирекционного угла на пункт назначения, а также дирекционного
угла объекта.
Слайд 16
КООРДИНАТОР
1 — ручка УСТАНОВКА х, у, ∆х,

∆у; 2 — рычаг установки х, у, ∆х, ∆у;
3 — шкалы счетчиков х, у; 4 — шкалы счетчиков
∆х, ∆у; 5 — стрелка указателя КУРС ГО; 6 — шкала КУРС ГО; 7 — шкала КУРС ТО: 8 — шкала КОРРЕКТУРА ПУТИ: 9 – ручка УСТАНОВКА КОРРЕКТУРЫ: 10 — кнопка ВВОД ПОПРАВОК (Кн2); 11 — кнопка ЗАПУСК (Кн1) ; 12 — тумблер СИСТЕМА (В1): 13 — тумблер Х-У; 14 — тумблер РАБОТА-КОНТРОЛЬ (В13) ; 15 — рукоятка УСТАНОВКА КУРСА; 16 — указатель α п.н.
Слайд 17
Устройство корректуры пути предназначено для приведения сигналов пути

с масштабом 26,7 см, приходящих с МДП или ЭСП,
к масштабу 1 м и корректировки их в пределах от
+10 до -13%.
Устройство корректуры пути
Слайд 18
предназначен для непрерывной индикации местоположения движущегося объекта на

топографической карте. Планшет обеспечивает работу с топографическими картами масштабов
1: 50000, 1:100000.
Планшет состоит из двух одинаковых приводов осуществляющих перемещение
визирных нитей в двух взаимно перпендикулярных направлениях.
Перекрестие визирных нитей определяет местонахождения объекта на топографической карте вставленной в планшет. Начальная установка координат X, У осуществляется ручками УСТАНОВКА X , УСТАНОВКА Y движение с которых через муфты, редукторы 3, 6, дифференциалы 4, 5 и редукторы 7, 8 передается на винты построительной части.
Планшет индикаторный
Слайд 20
Курсоуказатель предназначен для индикации дирекционного угла объекта, поступающего

с координатора
Слайд 22
Включение аппаратуры
Включение аппаратуры проводите только на стоянке объекта.

Для этого снять чехол с координатора и установить органы
управления приборов аппаратуры в следующие положения:
на координаторе:
тумблер СИСТЕМА в положение
ОТКЛ;
тумблер РАБОТА-КОНТРОЛЬ в положение РАБОТА;
тумблер Х-У в произвольное положение;
шкалу КОРРЕКТУРА ПУТИ с помощью ручки УСТАНОВКА КОРРЕКТУРЫ в положение, соответствующее последнему значению, записанному в паспорте на аппаратуру;
на планшете индикаторном:
микротумблер ВКЛ X, У во включенное положение;
переключатель МАСШТАБ в положение, соответствующее масштабу установленной в прибор карты;
на пульте управления при откинутой крышке проверить положение шкалы ШИРОТА и, при необходимости, приведите рукояткой в соответствие с широтой местоположения объекта;
тумблер установить во включенное положение.
Для включения аппаратуры тумблер СИСТЕМА координатора установить в положение ВКЛ, при этом загораются лампы подсветки шкал приборов. За время не более 8 мин. после включения загорается зеленая или желтая лампа пульта управления.
Аппаратура готова к работе через 13 (20) мин. после включения. Для выключения аппаратуры тумблер СИСТЕМА координатора установить в положение ОТКЛ.
Слайд 23
Подготовка исходных данных
Подготовку исходных данных целесообразно проводить заблаговременно.

Она заключается в определении координат исходного пункта маршрута Xп.н.,
Yп.н. дирекционного угла на ориентир αор., разностей координат пункта назначения
и исходного пункта ΔXп.н.., ΔYп.н.
В качестве исходного пункта следует выбирать контурные точки местности (пункты государственной геодезической сети, памятники, мосты, железнодорожные переезды, специальные точки в постоянных парках и т.д.).
При использовании в качестве исходного пункта пунктов государственной геодезической сети их координаты могут быть взяты из каталога координат геодезических пунктов или с топографической карты.
При использовании в качестве исходного пункта других контурных точек их координаты определяйте по карте масштаба 1: 25000 или, в крайнем случае, масштаба
1: 50000 с помощью циркуля измерителя и поперечного масштаба хордоугломера (рис.23) по следующей методике:
найдите исходный пункт на карте;
запишите значение километровой линии, образующей нижнюю сторону квадрата, в котором расположен исходный пункт;
измерьте измерителем расстояние по перпендикуляру от исследуемого пункта до нижней километровой линии;
поставьте на 0 поперечного масштаба хордоугломера правую иглу измерителя;
запишите ближайшее правое от левой иглы измерителя значение поперечного масштаба хордоугломера;
подвиньте измеритель вверх таким образом, чтобы правая игла скользила по нулевой вертикальной линии хордоугломера. Левая игла при этом должна двигаться строго на одном уровне с правой иглой;
перемещайте измеритель до тех пор, пока левая игла не пересечет вертикальную наклонную линию;
прибавьте это значение к ранее записанному значению.
Слайд 24
ОБЩЕВОЙСКОВАЯ КАФЕДРА ВФ ГрГУ
специальная подготовка
Тема 4. Навигационное оборудование.
Занятие
