Инструкция для сборки робота ev3 для движения по черной линии
Достаточно простая и эффективная схема робота lego ev3 для движения по черной линии с двумя датчиками. В данной схеме лего представлен переднеприводный робот с большими колесами, это обеспечивает хорошую манёвренность, которая необходима при движении робота ev3 вдоль черной линии. Программа для движения робота ev3 по черной линии
Инструкция сборки робота Lego для движения по черной линии
1
2
3
4
5
6
Анологично собирается правая сторона робота ev3 для движения по черной линии
7
Датчики цвета можно разместить и по другому прикрепив их внутри
8
9
10
Крепим большие колеса через втулку
11
Детали для крпеления заднего колеса
12
13
14.
Датчик цвета можно опустить на одно деление для лучшей контрастности
15
Если есть в наборе шаровое колесо , то можно использовать его в качестве заднего колеса
16
17
18
Крепим провода датчики к портам 1 и 3 мотора к портам A и B
19
Другие схемы роботов lego ev3
Полезно почитать по теме движение по черной линии
Движение по черной линии Ev3
Циклические алгоритмы ev3
Поделиться:
Комментарии ()
|
# |
|
Спасибо и респект автору за подробную инструкцию! |
|
Shadow Lynx [SX] # 1 июня 2019 в 08:17 0 |
|
Спасибо. это удобно |
|
Людмила # 17 января 2020 в 13:25 0 |
|
Огромное спасибо)) Очень, очень полезный ресурс)) |
Набор для робототехники LEGO MINDSTORMS EV3 (Home Edition) стал достаточно популярным среди детей. Однако не многие владельцы этого набора идут дальше стандартного набора моделей и решаются принять участие в соревнованиях.
Сегодня мы представляем простейшую модель робота для езды по линии, собрав который можно смело выходить на соревнования.

Итак, начнем.
1) Скачайте архив примера
2) Распакуйте его в любую папку.
3) Запустите файл «Building Instructions [line robo-city].html»
4) В бровзере откроется инструкция для сборки конструкции.
5) Запустите среду программирования Lego Ev3 и загрузите файл «easy_line_robot.ev3″
6) Подключите робота к ПК и загрузите программу в робота.
7) Робот готов к езде. Поставьте его на поле с линией. Датчик света должен располагаться слева от линии
 Выберите на блоке управления загруженную программу с названием «1» и запустите ее.
Выберите на блоке управления загруженную программу с названием «1» и запустите ее.
Если по какой-то причине робот не едет или ведет себя странно, проверьте правильность подключения двигателей и датчика света к портам управляющего блока. Так же возможно вам придется подкорректировать пороговые значения программы, для определения черного цвета.
Это базовая модель, которую вы можете улучшить, изменив некоторые параметры программы или усовершенстовав конструкцию.
До встречи на робо гонках!
Находясь на сайте, вы даете согласие на обработку файлов cookie. Это необходимо для более стабильной работы сайта
Close
Основы программирования LEGO Education EV3 Mindstorms
![]()
Подготовка к соревнованиям
Для участия в соревнованиях «Следование по линии» узнайте, как должен быть устроен ваш робот, и как работает датчик цвета.
Регулятор — устройство, которое управляет величиной контролируемого параметра в системах автоматического регулирования. Его задача — следить за отклонением контролируемого параметра от заданного значения и формировать управляющий сигнал для минимизации этого отклонения.
Датчик (то же, что и сенсор) — устройство, воспринимающее внешнее воздействие (давление, температуру, деформацию, частоту, электрическое напряжение, положение в пространстве и т. д.) и непрерывно преобразующее его в сигнал, удобный для передачи, обработки или регистрации.
Терморегулятор — устройство для поддержания постоянной температуры.
Фоторезистор — датчик, электрическое сопротивление которого меняется в зависимости от интенсивности падающего на него света. Чем выше уровень освещенности, тем ниже электрическое сопротивление, и наоборот.
Реле — электромеханическое устройство, которое позволяет замыкать или размыкать электрическую цепь при поступлении на него управляющего сигнала.
Примеры использования регуляторов
Задача: поддерживать заданную температуру подошвы утюга.
Регулятор: терморегулятор — система, состоящая из биметаллической пластины, контактов и механизма установки заданной температуры.
![]()
Принцип работы: электрический ток проходит через нагревательный элемент, который выделяет тепловую энергию и передает ее на подошву утюга. В электрической цепи также установлен регулятор с биметаллической пластиной (подробнее о биметаллической пластине).
Если температура меньше заданной, то биметаллическая пластина замыкает контакты, и утюг нагревается. Если температура выше заданной, то пластина изгибается (это происходит потому, что разные металлы при нагреве расширяются по-разному), размыкает контакты, и утюг остывает
1 — ручка для установки температуры нагрева; 2 —контактная пластина регулятора; 3 — штифт из термостойкого изоляционного регулятора; 4 — биметаллическая пластина (А — медная, В — стальная); 5 — нагревательный элемент (ТЭН)
Принцип работы терморегулятора
Объект: уличное освещение
Задача: автоматическое включение искусственного источника света, когда уровень естественной освещенности на улице становится ниже порогового значения (например, при наступлении сумерек).
Регулятор: фотореле — система, включающая в себя фоторезистор, реле и управляющие элементы.
![]()
Принцип работы: с наступлением темного времени суток количество солнечного света, попадающего на светочувствительную поверхность фоторезистора, уменьшается.
При этом электрическое сопротивление датчика, наоборот, возрастает. Когда электрическое сопротивление достигает уровня выше порогового значения, управляющие элементы схемы дают сигнал на замыкание контактов реле. Искусственное освещение включается.
![]()
С рассветом естественная освещенность на улице начинает увеличиваться, и электрическое сопротивление фоторезистора снижается. Когда уровень освещенности достигает отметки выше порогового значения, а электрическое сопротивление — ниже порогового значения, управляющие элементы схемы дают сигнал на размыкание контактов реле, выключая искусственный источник света.
Релейный двухпозиционный регулятор
Релейными двухпозиционными регуляторами называются регуляторы, у которых регулирующий элемент под действием сигнала от датчика может принимать одно из двух крайних положений: «открыт» или «закрыт».
![]()
Алгоритм релейного двухпозиционного регулятора
Датчик цвета LEGO EV3 Mindstorms
Датчик цвета LEGO EV3 Mindstorms — это цифровой датчик, который определяет цвет или яркость света, поступающего в фотоприемник на лицевой стороне датчика. Он измеряет интенсивность света, падающего на фотоприемник, и может работать в трех разных режимах: «Цвет», «Яркость отраженного света» и «Яркость внешнего освещения».
В режиме «Цвет» датчик может распознать 7 различных цветов:
Отсутствие цвета свидетельствует о том, что датчик находится на таком расстоянии от исследуемой поверхности, при котором он не способен различать цвета (более 5 см).
Для наибольшей точности, выбирая режим «Цвет» или «Яркость отраженного света», датчик следует держать под прямым углом к исследуемой поверхности (смотри рисунок) на расстоянии 0,5 см.
В этом разделе вы узнаете, какие детали для сборки робота вам пригодятся, и какие тонкости нужно учесть, чтобы собрать идеального робота для соревнований
Такого робота нам предстоит собрать
Шаг 4 из 26. Соедините правый двигатель с основным блоком так же, как в шаге 7
Шаг 7 из 26. Соедините второй двигатель и 2 синих штифта с основным блоком
Шаг 8 из 26. Соедините синий штифт с основным блоком
Шаг 9 из 26. При работе с батарейками, а не с аккумулятором можно изменить схему так, чтобы данная площадка соприкасалась с батарейным отсеком за счет крепления двигателей выше на 1 модуль
Шаг 13 из 26. Соедините вторую изогнутую балку буквой Г с корпусом
Шаг 14 из 26. Соедините волокушу и закрепите площадку с двигателем красным штифтом
Подготовьте все детали, которые вам понадобятся для сборки робота
![]()
Проверяйте каждую деталь на соответствие ее свойствам: колеса должны крутиться, а штифты — крепко удерживать балки между собой
Собирайте робота шаг за шагом, в соответствии с инструкцией
Если шаг сборки вам непонятен, то вернитесь на шаг назад и проверьте правильность сборки на предыдущем шаге
По окончании сборки обязательно сверьте вашу модель с итоговым образцом и проверьте надежность соединения всех узлов конструкции
Оптимальные параметры робота
Установите датчик на высоте 0,5 см от полигона (один модуль LEGO). Если установить датчик выше или ниже, то он будет хуже считывать цвет поверхности.
Расположите датчик и колеса таким образом, чтобы они находились в углах равностороннего треугольника. Если установить датчик на другом расстоянии, то робот будет двигаться менее стабильно и сходить с траектории.
Соберите робота так, чтобы его центр тяжести находился над осью колес. Если центр тяжести будет расположен не над колесами, то это приведет к пробуксовке на поворотах и к снижению скорости робота.
Дополнительные инструменты
Запрограммируйте вашего робота в режиме определения цвета и протестируйте его на полигоне
После установки запустите программу и создайте новый проект
Запрограммируйте вашего робота, как это показано на видео, и протестируйте его на полигоне
Да, вот так! Теперь пройдись по схеме.

Режим блока рулевого управления «Включить»
Установлено значение параметра «Угол поворота» 35 — направо
Режим блока рулевого управления «Включить»
Блок «Условие». Выбран режим «Датчик цвета» –> «Измерение» –> «Цвет»
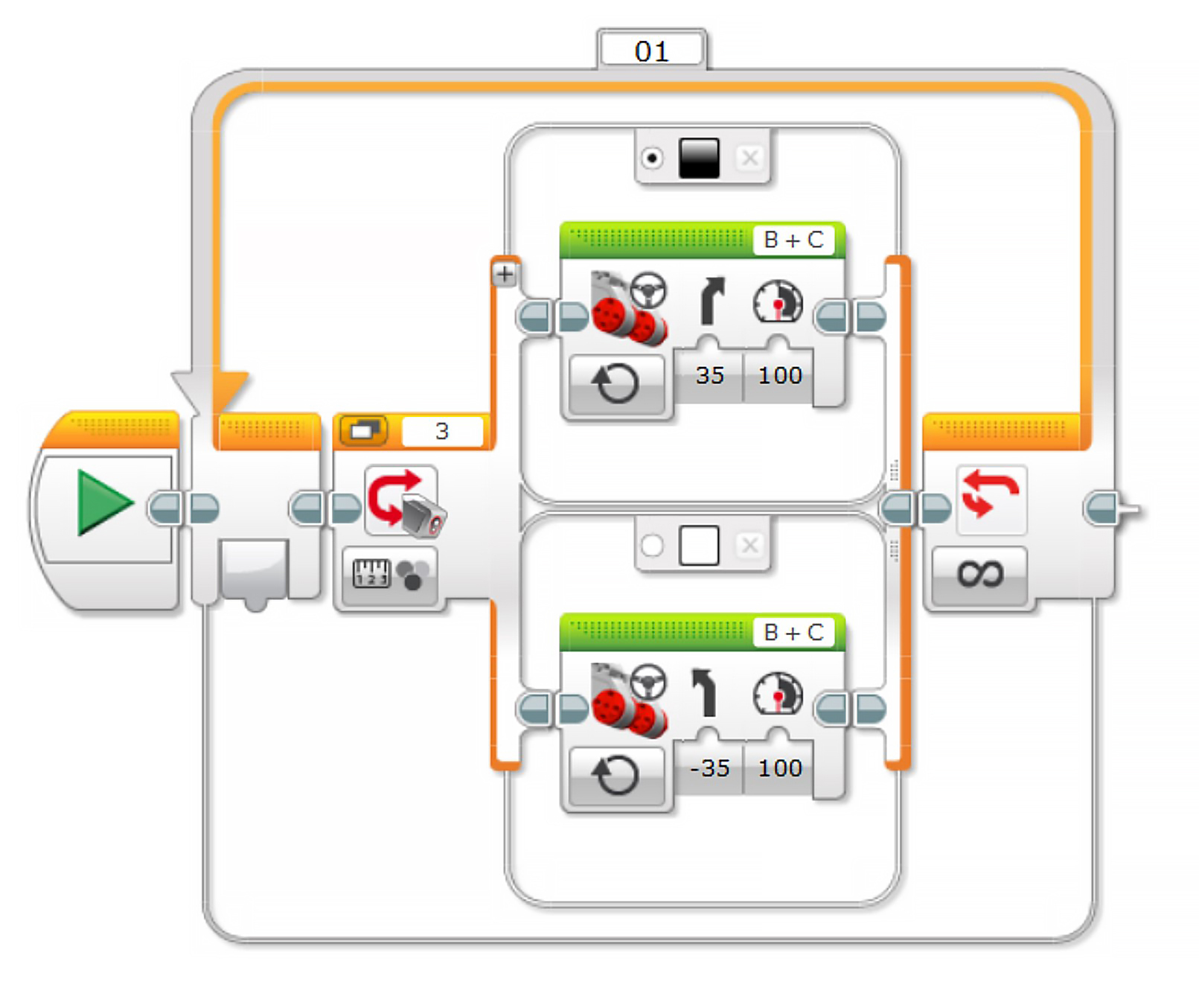
Установлено максимальное значение параметра «Мощность двигателей» 100
Установлено значение параметра «Угол поворота» 35 — налево
Установлено максимальное значение параметра «Мощность двигателей» 100
Выберите цвет поверхности:
- 0 = нет цвета
- 1 = черный
- 2 = синий
- 3 = зеленый
- 4 = желтый
- 5 = красный
- 6 = белый
- 7 = коричневый
Ветка условия, которая выполняется, когда датчик видит черный цвет
Ветка условия, которая выполняется, когда датчик видит белый цвет
Блок «Рулевое управление»
Блок «Рулевое управление»
Поменяйте режим датчика цвета с определения цвета на сравнение яркости отраженного света и узнайте, как это повлияет на движение робота по линии
В режиме «Яркость отраженного света» датчик определяет в процентах от 0 до 100, сколько света отразилось от поверхности и вернулось в фотоприемник по отношению к количеству света, выпущенного светодиодом, расположенным на лицевой стороне датчика.
![]()
0 — поверхность черного цвета или поверхность отсутствует, 100 — поверхность белого цвета
Режим сравнения яркости отраженного света позволяет более точно определить цвет и границы поверхности и, соответственно, помогает более точно управлять движением робота. В данном режиме также удобно работать и при изменяемых условиях внешней освещенности.
Определение границы черной линии и белого полигона
Для того чтобы определить границу черной линии и белого полигона, выполните следующие действия:
Наведите датчик освещенности на черную линию и запишите значение яркости отраженного света в этом месте
Наведите датчик освещенности на белый полигон и запишите значение яркости отраженного света в этом месте
Занесите показания в формулу расчета границы черного и белого и вычислите значение серого
Используйте полученное значение в вашей программе
Формула расчета границы черного и белого
Серый равен среднему арифметическому между черным и белым.
![]()
Выберите режим сравнения яркости отраженного света
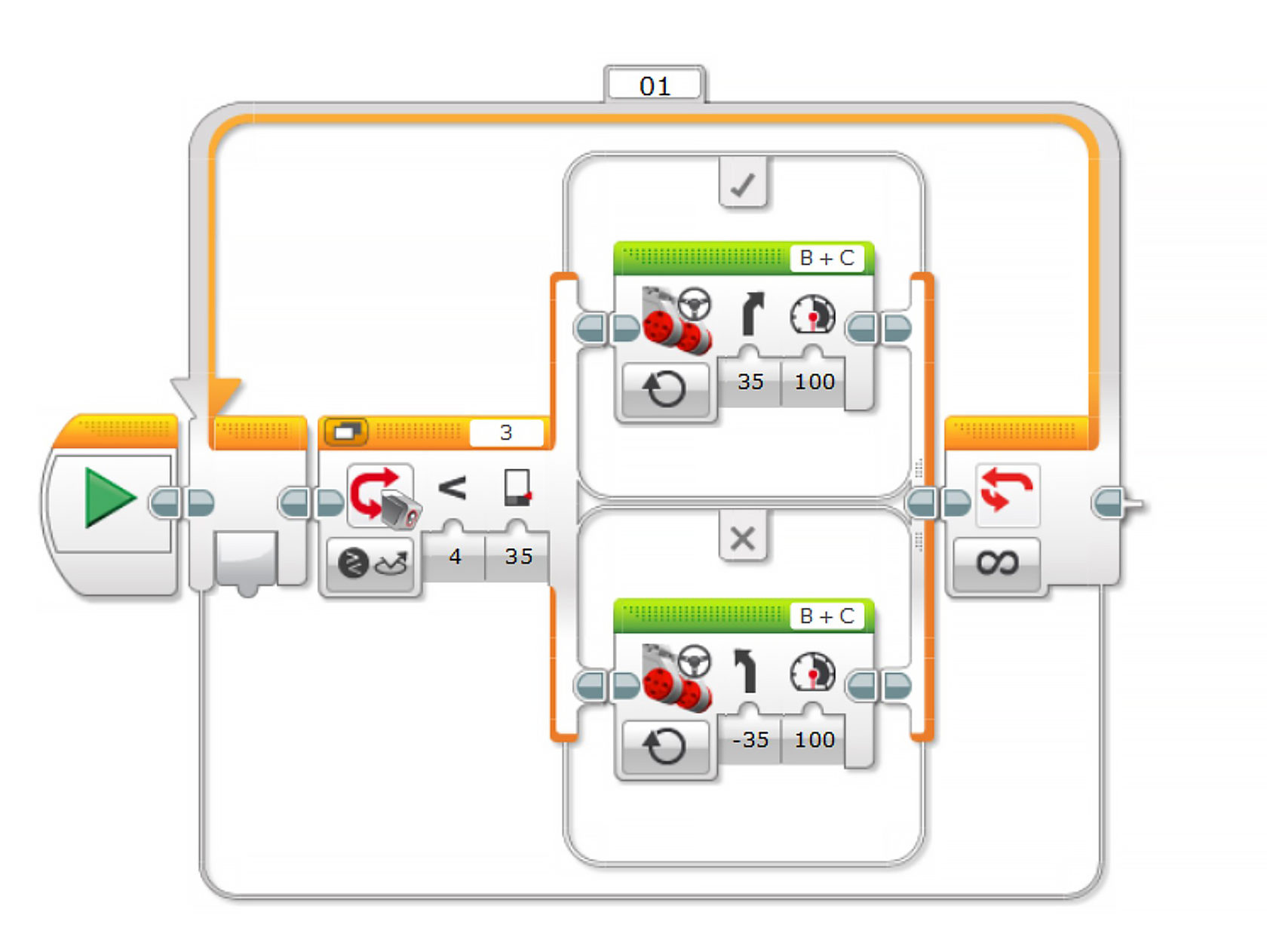
Установлено пороговое значение серого 35
Да, вот так! Теперь пройдись по схеме.

Сравнение со знаком «Меньше»
Теперь вы готовы принять участие в соревнованиях!
![]()
![]()
![]()
Посмотрите советы победителей
Зарядите аккумуляторы и обязательно возьмите запасные батарейки. Они разряжаются всегда не вовремя
Перед запуском проверяйте надежность скрепленных деталей и колес. Развалившийся робот часто становится досадной причиной проигрыша
Сотрите из памяти робота все ненужные программы. Оставьте только те, которые необходимы для выполнения задачи. Исключите вероятность случайного запуска не той программы
Перед заездом протрите шины вашего робота и убедитесь, что на полигоне нет мусора. Чем чище — тем лучше сцепление колес с полигоном
Изучите опыт победителей прошлых лет
Сверьтесь с планом подготовки к соревнованиям
Продумать алгоритм робота
Tест
Насколько вы готовы к соревнованиям?
![]()
Это последний этап подготовки к соревнованиям
На какой высоте от поверхности наиболее оптимально устанавливать датчик освещенности робота, следующего по черной линии?
В вопросе несколько верных вариантов ответа
![]()
Вплотную
Нет, так совсем нельзя. Должен остаться зазор
0.5 см
Да, 1 модуль примерно равен 0.5 см
Толщина двух пальцев
Зависит от пальцев, конечно, но достаточно толщины одного.
Если датчик освещенности в режиме определения освещенности возвращает значение 0, то он направлен на:
![]()
Абсолютно темную поверхность
Да, верно!
Поверхность белого цвета
Нет, все наоборот
Поверхность красного цвета
Было бы совсем другое значение
Поверхность серого цвета
Было бы совсем другое значение
Какой знак следует поставить в данном алгоритме, для того чтобы робот ехал вдоль черной линии, а граница черного и белого определена как 34, и робот располагается левее линии?
В вопросе несколько верных вариантов ответа
![]()
Меньше
Нет, тут нужен другой знак
Больше либо равно
Да, тоже подходит!
Меньше либо равно
Нет, этот вариант не подойдет
Как изменится движение робота, если датчик освещенности сдвинуть ближе к оси колес?
![]()
Движение робота станет более плавным
Нет, что-то другое произойдет
Движение робота станет более «Дерганным»
Верно! Можно идти дальше
Движение робота не изменится
Оно все же изменится
Какие действия приведут к увеличению скорости при движении вдоль черной линии и уменьшению времени прохождения полигона с помощью релейного регулятора?
Выберите все действия.
Подбор более точного значения серого цвета
Да!
Установка меньшего значения мощности двигателя
Нет, этот вариант лишний
Установка более оптимального значения угла поворота
Точно!
Установка большего значения мощности двигателей
То что нужно!
Кажется, вы еще не готовы к соревнованиям
Посмотрите материалы урока еще раз и возвращайтесь
![]()
Вы готовы! Вперед, на соревнования!
Таким результатом стоит поделиться 
Движение по линии
- Введение:
- Изучаем датчик цвета
- Датчик цвета. Режим «Цвет»
- Оранжевая палитра, программный блок «Переключатель»
- Оранжевая палитра, программный блок «Прерывание цикла»
- Датчик цвета – режим «Яркость отраженного света»
- Датчик цвета – режим «Яркость внешнего освещения»
- . Желтая палитра — «Датчики»
- Движение по линии
- Алгоритм движения по черной линии на одном датчике цвета
- Алгоритм движения по черной линии с двумя датчиками
Алгоритм движения по черной линии на одном датчике цвета
Алгоритм движения по черной линии на одном датчике цвета

Рассмотрим простейший алгоритм движения по черной линии на одном датчике цвета на EV3.
Данный алгоритм является самым медленным, но самым стабильным.
Робот будет двигаться не строго по черной линии, а по ее границе, подворачивая то влево, то вправо и постепенно перемещаясь вперед.
Алгоритм очень простой: если датчик видит черный цвет, то робот поворачивает в одну сторону, если белый — в другую.
Реализация в среде Lego Mindstorms EV3
В обоих блоках движения выбираем режим «включить». Переключатель настраиваем на датчик цвета — измерение — цвет. В нижней части не забудьте изменить «нет цвета» на белый.
Также, необходимо правильно указать все порты.
Не забудьте добавить цикл, без него робот никуда не поедет.


Проверьте. Для достижения лучшего результата попробуйте изменить значения рулевого управления и мощности.
Один датчик, с П регулятором
Один датчик, с П регулятором
Алгоритм:
Действие алгоритма основано на том, что в зависимости от степени перекрытия, пучка подсветки датчика чёрной линией, возвращаемые датчиком показания градиентно варьируются. Робот сохраняет положение датчика света на границе чёрной линии. Преобразовывая входные данные от датчика света, система управления формирует значение скорости поворота робота.
Так как на реальной траектории датчик формирует значения во всём своём рабочем диапазоне (0-100), то значением к которому стремиться робот, выбрано 50. В этом случае значения передаваемые функции поворота формируются в диапазоне -50 — 50, но этих значений недостаточно для крутого поворота траектории. По этому следует расширить диапазон в полтора раза до -75 — 75

Более устойчиво алгоритм работает, если использовать моторы с управлением скоростью –100…100.
В этом случае есть возможность отрегулировать плавность поворота в соответствии с кривизной линии
Так как на реальной траектории датчик формирует значения во всём своём рабочем диапазоне (0-100), то значением к которому стремиться робот, выбрано 50. В этом случае значения передаваемые функции поворота формируются в диапазоне -50 — 50, но этих значений недостаточно для крутого поворота траектории. По этому следует расширить диапазон в полтора раза до -75 — 75
Один датчик, с ПK регулятором
Один датчик, с ПK регулятором
Вы наверно заметили, что в прошлом примере робот излишне раскачивался, что не давало ему достаточно разогнаться. Сейчас мы постараемся немного улучшить эту ситуацию.
К нашему пропорциональному регулятору мы добавляем ещё и простой кубический регулятор, который добавит изгиб в функции регулятора. Это позволит уменьшить раскачивание робота рядом нужной границей траектории, а так же совершать более сильные рывки при сильном удалении от неё

Алгоритм движения по черной линии с двумя датчиками
Алгоритм движения по черной линии с двумя датчиками
Движение с двумя датчиками:
Вы уже знаете алгоритм движения робота по черной линии с использованием одного датчика. Сегодня рассмотрим движение по линии с использованием двух датчиков цвета.
Датчики нужно установить таким образом, чтобы черная линия проходила между ними.
Алгоритм будет следующий:
• Если оба датчика видят белый цвет – двигаемся вперед;
• Если один из датчиков видит белый, а другой черный – поворачиваем в сторону черного;
• Если оба датчика видят черный цвет – мы на перекрестке (например, остановимся).
Для реализации алгоритма нам потребуется отслеживать показания обоих датчиков, и только после этого задавать движение роботу. Для этого будем использовать переключатели, вложенные в другой переключатель. Таким образом, мы опросим сначала первый датчик, а потом, независимо от показаний первого, опросим второй датчик, после чего зададим действие.
Подключим левый датчик к порту №1, правый – к порту №4.
Программа с комментариями:


Содержание
- Движение по линии
- Алгоритмы движения робота
- Зрение робота EV3
- Калибровка датчика цвета
- Ручной режим калибровки датчика цвета EV3
- Автоматическая калибровка датчика цвета
- Движение по тонкой линии Arduino
Движение по линии
Одним из часто встречающихся видов соревнований является соревнование “Движение робота вдоль черной линии”. В последнее время активно развивается робототехника, открывается множество кружков. Как следствие проводится множество соревнований и конкурсов по робототехнике различного уровня. Это направление называется соревновательная робототехника.

Это соревнование проводится в разных номинациях и категориях. Есть движение по широкой линии (5 см), по узкой линии (1,5 см), включают в движение по линии участки с прерывистой линией. Часто еще используется объезд роботом препятствий (например объезд кирпича) или преодоление препятствий (например, качающийся мост). После преодоления препятствий робот должен вернуться на линию и успешно финишировать.
Так как сейчас есть много типов робототехнических конструкторов, то соревнования также разделяют по категориям. Т.е. движение по линии Lego EV3, отдельно движение по линии Arduino и т.д. Побеждает робот, преодолевший дистанцию за минимальное время не потеряв трассу.
Алгоритмы движения робота
Есть несколько основных алгоритмов движения робота вдоль черной линии с использованием различных типов регуляторов:
- Релейный регулятор
- Пропорциональный регулятор
- Пропорциональный дифференциальный регулятор
- Кубический регулятор
- Пропорциональный интегральный регулятор
- Пропорциональный интегральный дифференциальный регулятор
Можно использовать эти алгоритмы с применением одного, двух, трех и даже четырех датчиков цвета. Количество применяемых датчиков зависит от сложности соревнований и каждый раз подбирается индивидуально..
Робот EV3 не обладает зрением и может воспринимать информацию о линии при помощи датчика цвета EV3.

Робот и человек по разному видят черную линию. У человека границы черного и белого четко различимы. Робот же видит размытую картину границы черного и белого. Для того, чтобы более точно определить линию, датчик робота должен быть расположен на границе черной линии и белого поля посередине.

При этом высота расположения датчика над линией должна быть около 1 см. Но это рекомендуемая высота. На соревнованиях встречаются различные варианты расположения датчика и подбираются они участниками индивидуально.
Калибровка датчика цвета
Для того, чтобы применить указанные алгоритмы нужно откалибровать датчик цвета на реальном поле. Есть два способа калибровки:
- ручной способ — все вычисления проводятся самостоятельно
- автоматическая калибровка — вычисления производятся при помощи блоков операций с данными

Датчик работает в режиме отраженного света. Суть метода состоит в том, что мы находим пороговое значение белого и черного цвета.
На практике нужно измерить значение белого цвета, затем черного цвета, суммировать их и разделить на два. Т.е. если обозначить пороговое значение буквой C, значение белого цвета буквой A и значение черного цвета буквой B, то формула будет выглядеть следующим образом:
С = ( A + B ) / 2
Измерить значение белого и черного цвета можно просто поочередно расположив датчик над белой и черной линией и записать значения.
Ручной режим калибровки датчика цвета EV3
В ручном режиме делается это просто, при помощи меню, расположенном на экране блока Lego EV3. Для этого нужно на экране блока EV3 зайти в третью вкладку и открыть первое приложение из пяти. Это приложение называется представление порта.

Здесь можно быстро посмотреть к какому порту присоединены датчики или сервомоторы. При помощи кнопок управления микроконтроллером EV3 нужно перейти к любому из занятых портов, и тогда можно посмотреть текущие показания, которые в данный момент получены с сенсоров или сервомоторов.
Чтобы посмотреть или изменить текущие настройки для установленных сервомоторов и сенсоров нужно нажать центральную кнопку. Нажатие кнопки «Назад» возвращает нас в основное окно приложений.

Для примера установлю датчик цвета в порт под номером 3 и сниму показания на белом поле.

На экране блока EV3 отобразилось показание в 43 условных единицы. Таким же образом определяем показания датчика на черной линии. Например показания будут 3 условных единицы. Подставляем эти значения в формулу.
С = ( A + B ) / 2 = (43 + 3) / 2 = 46 / 2 = 23
В результате получаем пороговое значение 23 условных единицы.
Автоматическая калибровка датчика цвета
Таким же точно образом измеряем пороговое значение (его еще называют значение серого) при автоматической калибровке, но на этот раз значение записывается в переменную. Назовем переменную, например, porog. В среде программирования Lego EV3 пишем программу для калибровки.

В первой части программы нужно расположить датчик над белым фоном. Датчик касания расположен в 1 порту. В программе используется блок ожидания действия с датчиком касания. В данном случае установлен параметр “щелчок” — цифра 2 в нижней части блока ожидания. Т.е. нужно нажать и отпустить кнопку датчика.
После этого датчик цвета в режиме отраженного света измеряет значение белого цвета и значение записывается в переменную A.
Во второй части программы нужно расположить датчик над черной линией и также нажать на кнопку датчика касания. Значения черного цвета записываются в переменную B.
В третьей части программы мы считываем значения датчиков из переменной A и B и передаем их значения в блок математики, который находится в режиме “Дополнения”. В этом блоке происходит вычисление по формуле С = ( A + B ) / 2 ирезультат вычисления записывается в переменную С.
Теперь значение переменной С можно использовать в качестве порогового значения серого для дальнейшего использования в алгоритмах движения по линии.
Движение по тонкой линии Arduino
Фрагмент соревнований по робототехнике «Движение по тонкой линии». Также это соревнование называют «Тонкий Триал». Этот очень быстрый робот в номинации роботов Arduino является победителем региональных соревнований.
По условиям соревнований робот Arduino должен совершить объезд кирпича и преодолеть качающийся мост. После преодоления препятствий робот должен вернуться на линию и финишировать не сойдя с трассы. Тонкий триал есть и в категории Lego EV3 роботов.