Этот робот с клешнёй умеет не только хватать, но и приподнимать предметы. И оба эти действия он делает с помощью всего одного мотора. А за счёт резиновых кончиков клешни, робот может приподнимать даже скользкие предметы. Ну и конечно, то, что робот схватил, он может перевезти на другое место.
Для сборки робота c клешнёй я предлагаю инструкцию, а для быстрого старта – демонстрационную программу:
- После старта робот «делает зарядку» — разминает клешню. А как же иначе? Зарядку нужно делать всем!
- После зарядки робот сканирует пространство перед собой на расстоянии до 30 см., поворачиваясь на угол от -90 до +90 градусов (0 градусов – это стартовое положение).
- Если предмет обнаружен, робот подъезжает к нему хватает, едет обратно, разворачивается назад на угол -180 или 180 (смотря, что ближе), проезжает на 10 – 30 см. (первый раз на 30 см., второй — на 20 и третий — на 10) и бросает его. Затем возвращается назад.
- Когда собрано 3 предмета, робот засыпает: программа останавливается.
Вот схема движения робота:
Работу программы в действии можно посмотреть на видео:
Также роботом с клешнёй можно управлять с помощью мобильного приложения RoboLiterate:
Файлы:
Вот видео (обратите внимание, что ползунок справа нужно чуть приподнять наверх, чтобы клешня хорошо хватала предметы):
Инструкция для сборки робота с клешнёй и демонстрационная программа ниже:
Ещё один способ управления роботом с клешней показан на этом видео:
Здесь управление роботом сделано от первого лица с помощью смартфона, планшета и приложения RoboCam. Как установить и использовать это приложение читайте в следующих статьях. Скачать готовые настройки RoboCam для управления роботом с клешнёй можете здесь.

ClawBot — этот робот с клешнёй умеет не только хватать, но и приподнимать предметы. И оба эти действия он делает с помощью всего одного мотора. А за счёт резиновых кончиков клешни, робот может приподнимать даже скользкие предметы. Ну и конечно, то, что робот схватил, он может перевезти на другое место. Для сборки необходим набор 45544.
Комплектация
- большие моторы — 2 шт.
- средний мотор — 1 шт.
- МПК — 1 шт.
- датчик расстояния ультразвуковой- 1 шт.
- датчик касания — 1 шт.
- гироскоп — 1шт.
Скачать инструкцию по сборке данного робота можно ниже


Перейти к содержанию
В этой статье — инструкция по сборке достаточно распространенного варианта захвата Lego EV3 на червячной передаче. Захват надежно удерживает предметы и не раскручивается после остановки мотора. Подойдет для занятий по робототехнике или соревнований. Переходите по ссылке «Скачать инструкцию» ниже в описании.
Фото:



Оборудование: базовый набор Lego Mindstorms Education EV3.
Модель: ЗСМ2-Ч-В1 — захват на среднем моторе двухпальцевый червячный, вариант 1.
Механизмы: червячная передача, рычаг.
Особенности. Крутящий момент (сила) увеличивается за счет понижающей червячной передачи. Передаточное отношение — 24:1, т.е. 24 оборота на входе и 1 на выходе.
Силы захвата достаточно, чтобы поднять кубик без использования резинок (смотрите фото).
Недостатки:
— перекручивание червяка может привести к слишком сильному сжатию предмета и его повреждению или поломке пластиковых деталей.
Задачи:
- Собери захват, используя инструкцию.
- Соедини захват с робоплатформой или установи на манипулятор. Подключи средний мотор к блоку EV3.
- Доработай конструкцию захвата в зависимости от решаемой задачи.
- Выполни предложенные задачи по переносу или сортировке предметов.
( 1 оценка, среднее 5 из 5 )
Кузьминых С.Д. 1, Гребнева Д.М. 1
1РГППУ (ф) в г. Нижнем Тагиле
Текст работы размещён без изображений и формул.
Полная версия работы доступна во вкладке «Файлы работы» в формате PDF
Одним из ведущих направлений современной прикладной науки является робототехника. По всему миру проводятся конкурсы и состязания роботов для школьников и студентов. Лидирующие позиции в области школьной робототехники на сегодняшний день занимает фирма Lego (подразделение Lego Education) с образовательными конструкторами серии Mindstorms, Fischertechnik.
Робототехника – это прикладная наука, занимающаяся разработкой автоматизированных систем. Она опирается на такие дисциплины, как механика, физика, электроника, математика и информатика. Использование Лего – конструкторов в образовательной деятельности повышает мотивацию обучающихся к обучению и помогает достичь следующих образовательных целей:
коллективная выработка идей;
развитие словарного запаса и навыков общения при объяснении работы модели;
проведение систематических наблюдений и изменений;
логическое мышление и программирование заданного поведения модели;
установление причинно-следственных связей;
написание и воспроизведение сценария с использованием модели для наглядности и драматургического эффекта;
экспериментальное исследование, оценка (измерение) влияния отдельных факторов;
анализ результатов и поиск новых решений.
Одним из самых распространенных видов роботов являются роботы-манипуляторы. Для знакомства с конструкцией манипулятора школьникам можно предложить собрать робота с клешней [2], который может помочь в уборке помещения (рис. 1). Этот робот умеет не только хватать, но и приподнимать предметы. Например, убирать игрушки в определенное место.
Рис. 1. Робот с клешней
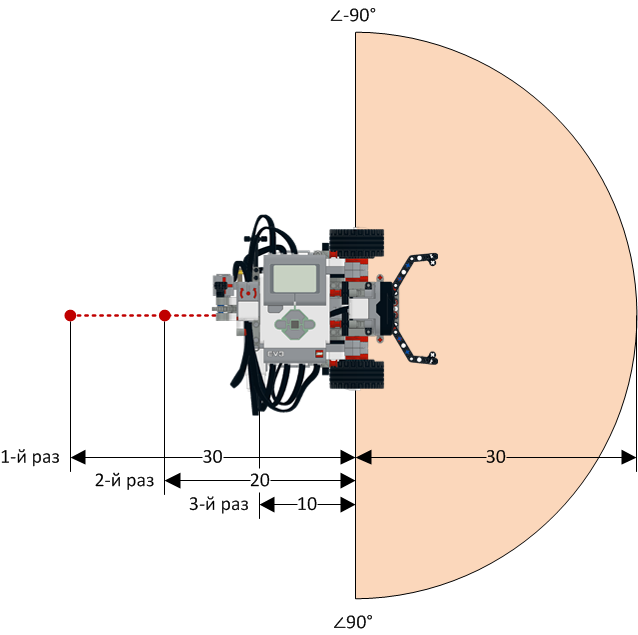
В данном проекте робот выполняет следующие действия по схеме (рис. 2):
После старта робот «делает зарядку» – разминает клешню.
После зарядки робот сканирует пространство перед собой на расстоянии до 30 см., поворачиваясь на угол от -90 до +90 градусов (0 градусов – это стартовое положение).
Если предмет обнаружен, робот подъезжает к нему хватает, едет обратно, разворачивается назад на угол -180 или 180, проезжает на 10 – 30 см. (первый раз на 30 см., второй — на 20 и третий — на 10) и бросает его. Затем возвращается назад.
Когда собрано 3 предмета, робот засыпает: программа останавливается.
Рис. 2. Схема движения робота
Для управления роботом нужна программа [1]. Данная программа пишется в среде программирования LEGO MINDSTORMS Education EV3 (приложение 1). Вначале были созданы шесть вспомогательных блоков: Grab, Throw, Turn, FindObj, FindEndOfObj, TurnTo. Каждый из блоков отвечает за определенное действие. Данные блоки были включены в итоговый вариант программы.
В данной работе был рассмотрен один из вариантов робота – помощника робот с клешней. Эту модель робота можно использовать в реальности, в различных сферах деятельности (сфера обслуживания, грузоперевозки, строительство и т.д.).
Робототехника позволяет разнообразить уроки информатики и других предметов, глубже изучить некоторые темы, позволяет раскрыть потенциал учащегося и помочь ему в дальнейшем с выбором будущей профессии. Вне зависимости от того, какой профессиональный путь изберет сегодняшний школьник в будущем, его работа так или иначе будет связана с использованием новейших технологий.
Список литературы
Демонстрационная программа для робота с клешней [Электронный ресурс]. URL: http://www.proghouse.ru/component/jdownloads/finish/4-razrabotki/39-demonstratsionnaya-programma-dlya-robota-s-kleshnjoj?Itemid=0
Инструкция для сборки робота с клешней [Электронный ресурс]. URL: http://www.proghouse.ru/component/jdownloads/finish/5-distributivy/38-instruktsiya-dlya-sborki-robota-s-kleshnjoj-iz-konstruktora-lego-mindstorms-ev3?Itemid=0
Никитина Т.В. Образовательная робототехника как направление инженерно-технического творчества школьников. – Челябинск: Изд-во Челяб. гос. пед. ун-та, 2014. – 169 с.
Тарапата В. В. Пять уроков по робототехнике //Информатика: Первое сентября.-2014.-№11.-С.12-25
Приложение 1
Программа движения робота с клешней
Интернет — магазин Educube.ru
г. Москва,
ул. 2-я Звенигородская, д. 13, стр. 15,
Юр. адресс: 111397, г. Москва, Федеративный пр-кт, д. 4, кв. 47
офис XI
Звоните:
+7 (495) 120-21-86
info@educube.ru
Мы работаем: c 09:00 до 18:00