Инструкция робота сумо nxt
Робот сумоист должен вытолкнуть робота соперника за кргу, поэтому лего робот должен быть достаточно мощным. В схеме мощного лего робота nxt для сумо используется полный привод Ковш робота nxt сумоиста поддевающий он легко поддевает сопреника лишая его спецки с поверхностьюю Для робота сумо ev3 схема аналогичная
Инструкция лего робота nxt для сумо
1 2
2
3 4
4
5 6
6
7 8
8
9 10
10
11 12
12
13 14
14
15 15
15
16 17
17
18 19
19
20  21
21
22
Другие схемы роботов lego
Поделиться:
Нет комментариев. Ваш будет первым!
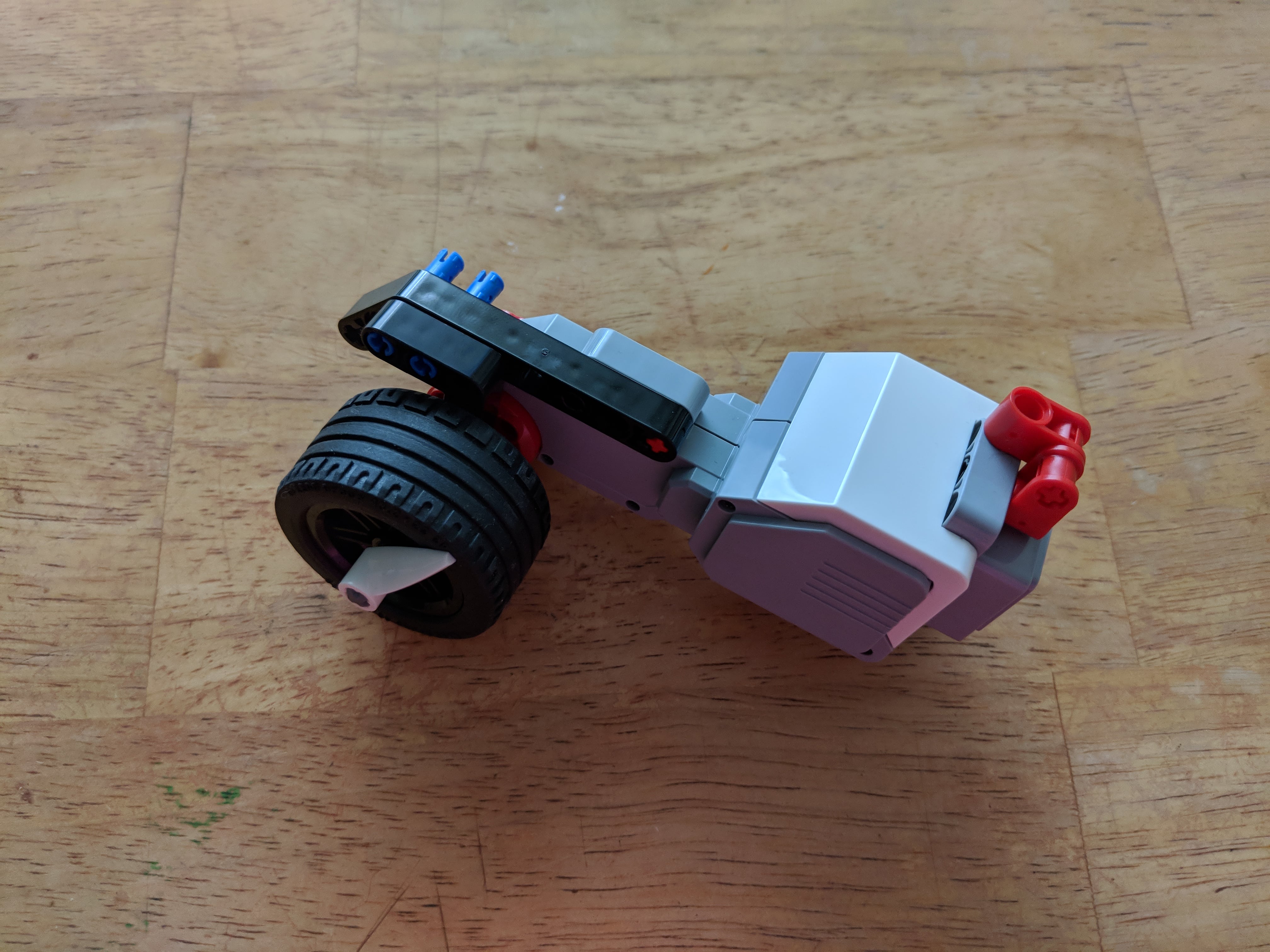
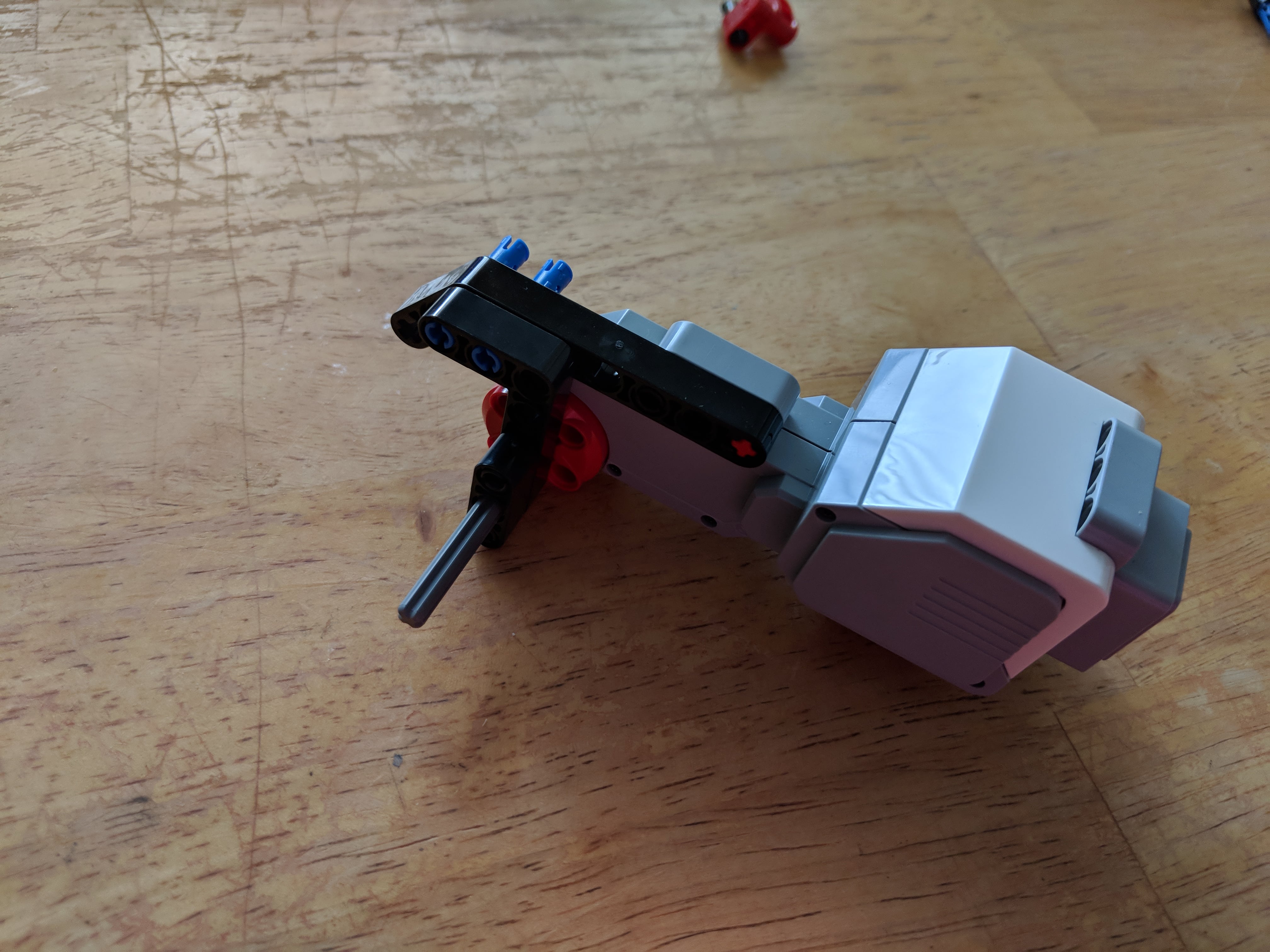
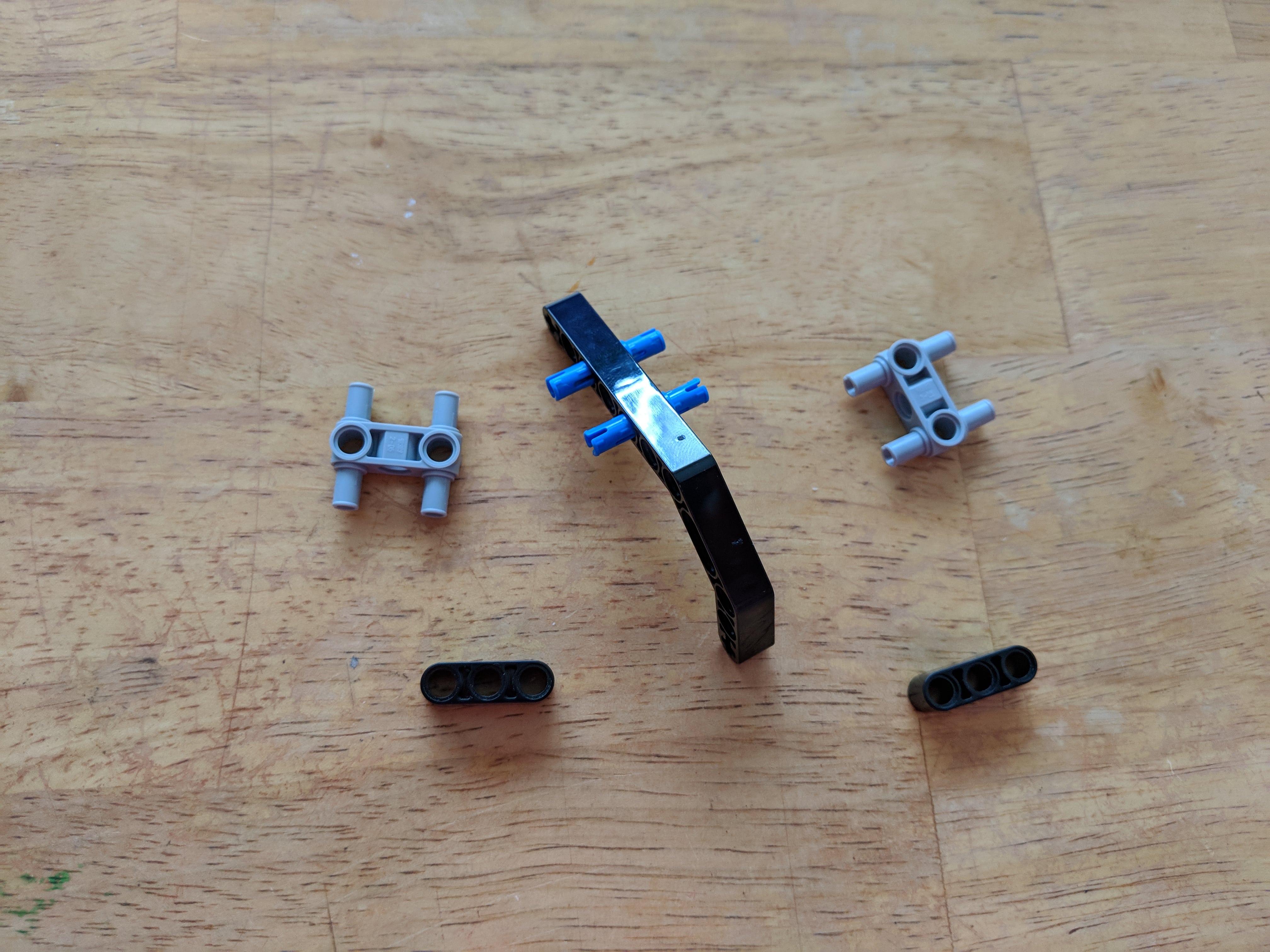
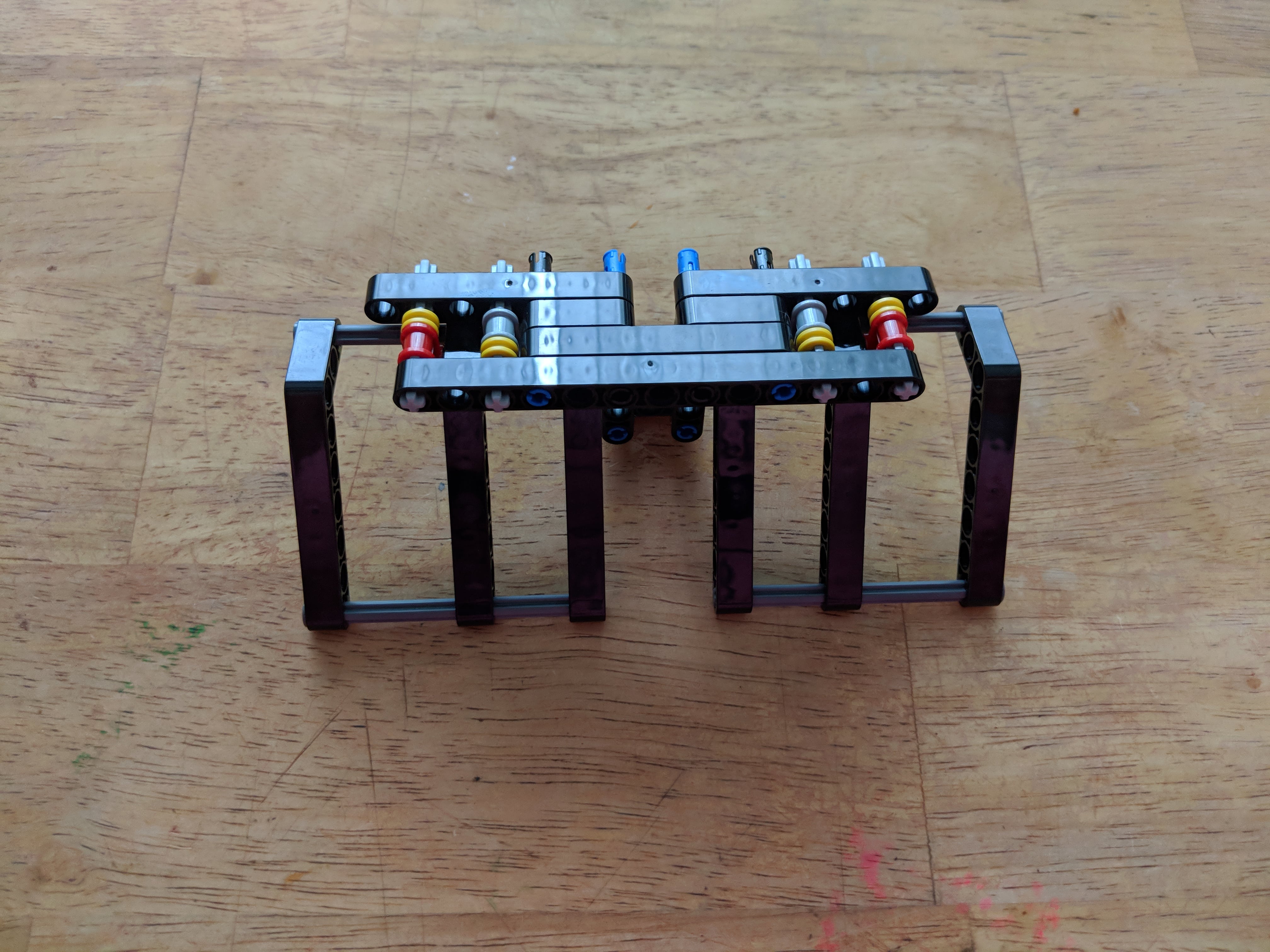
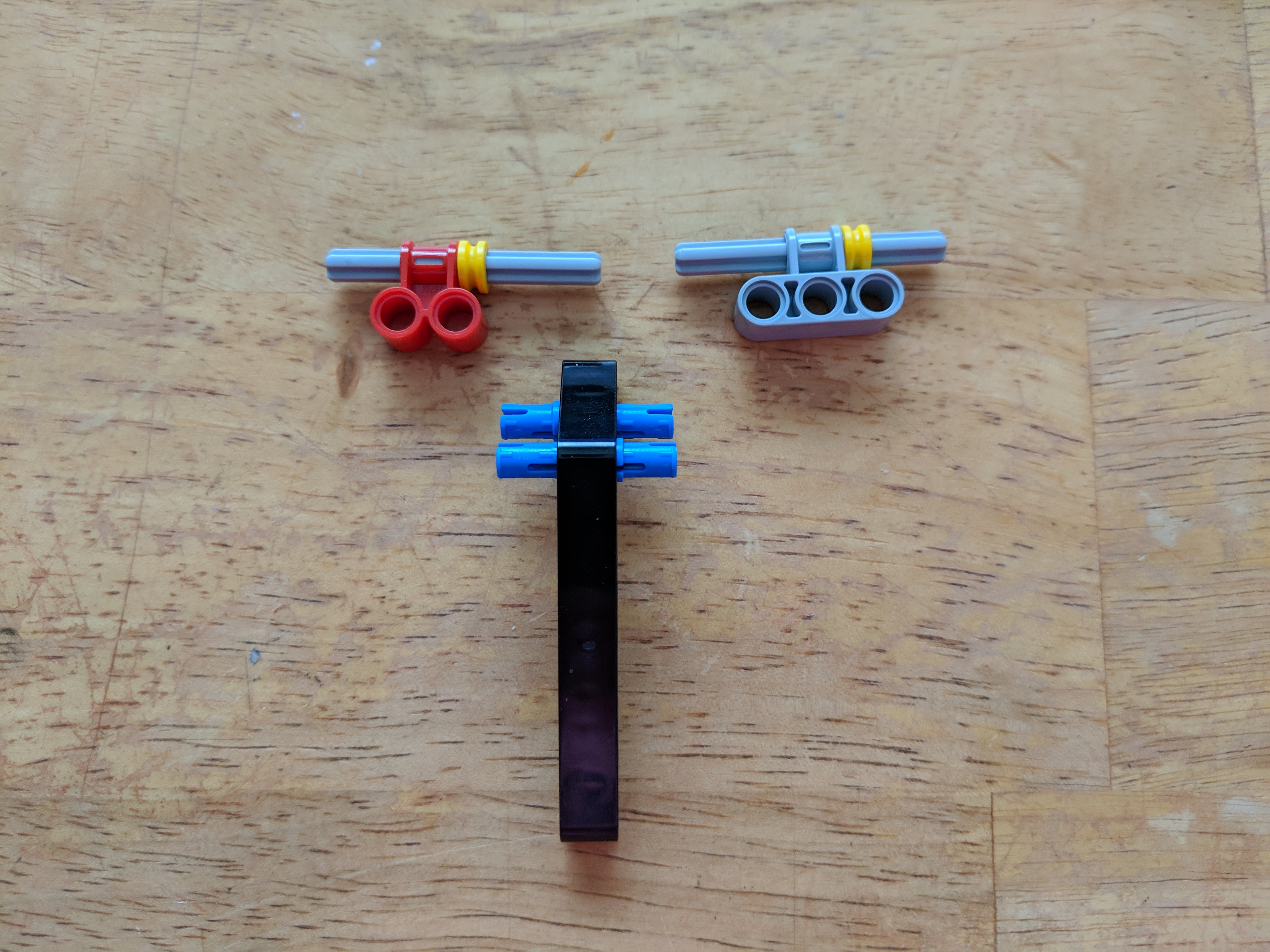
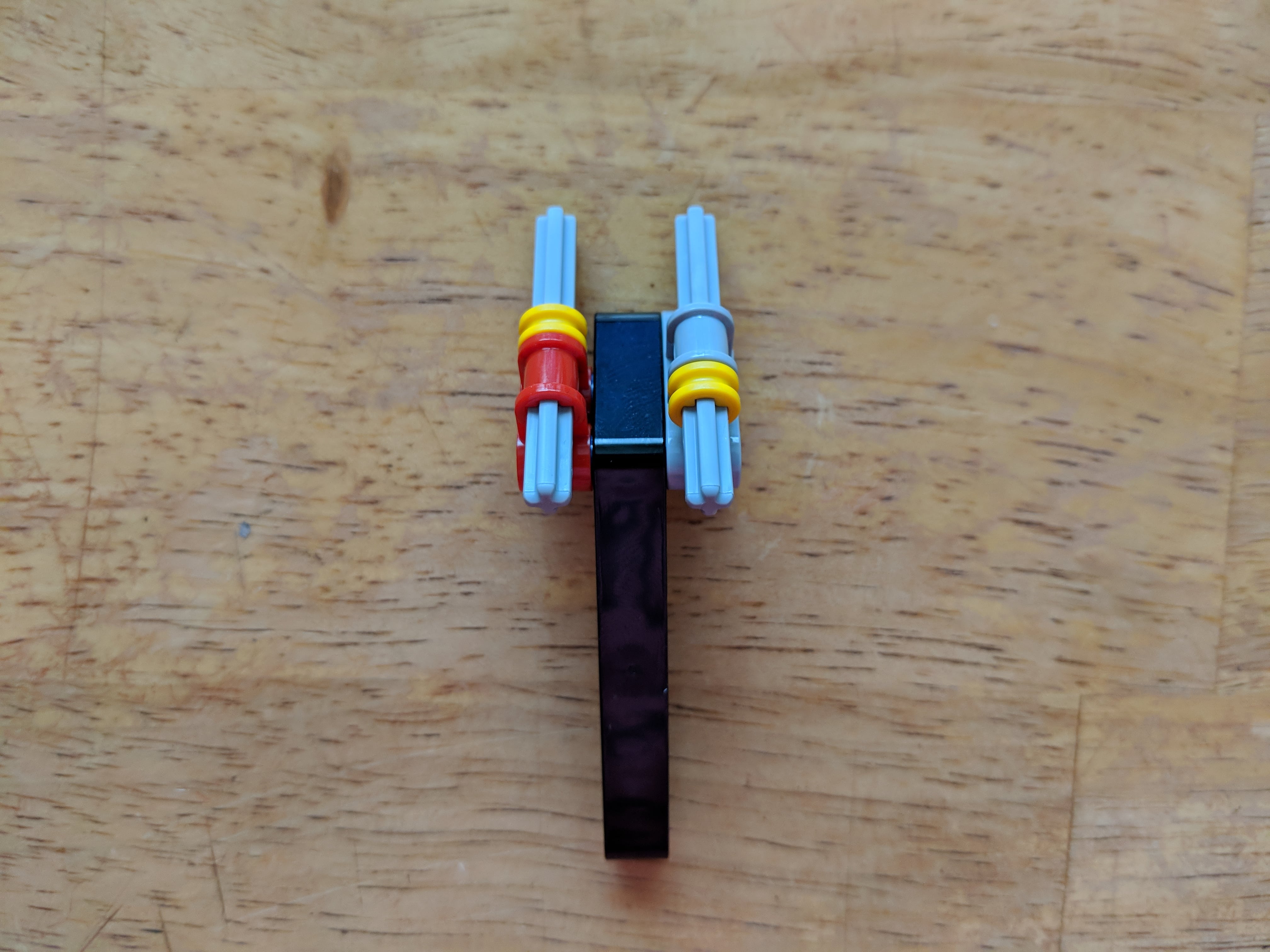
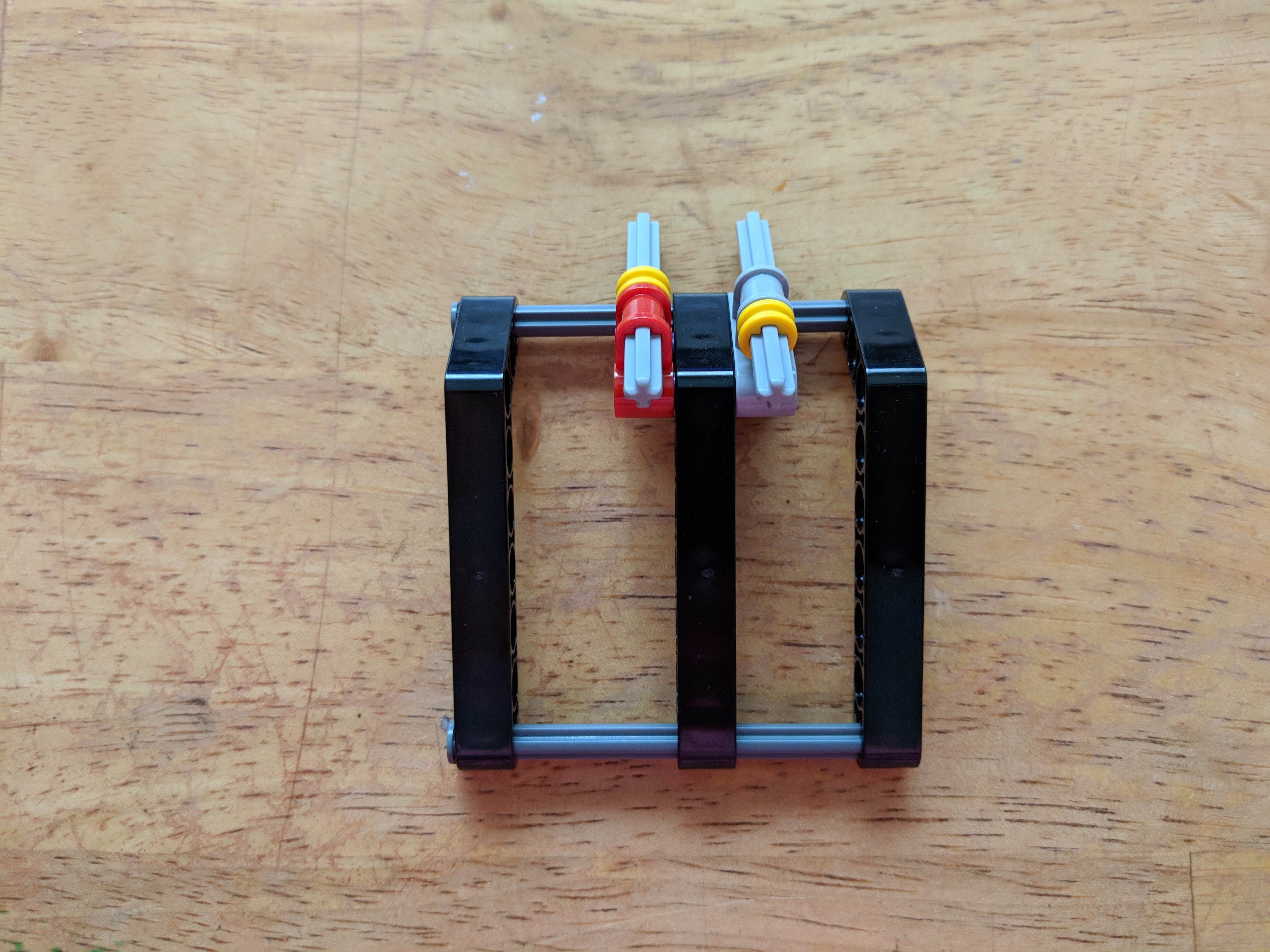
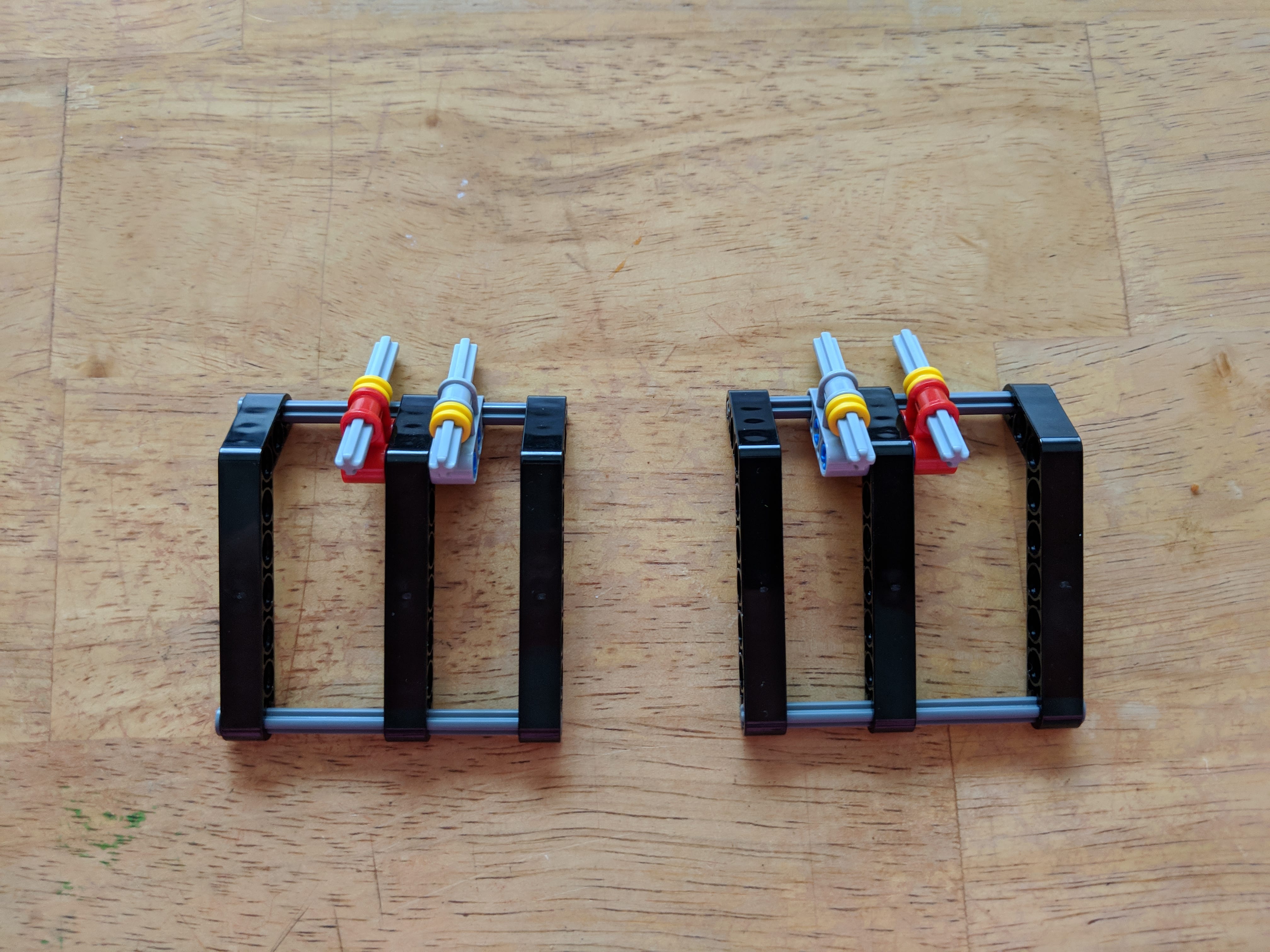
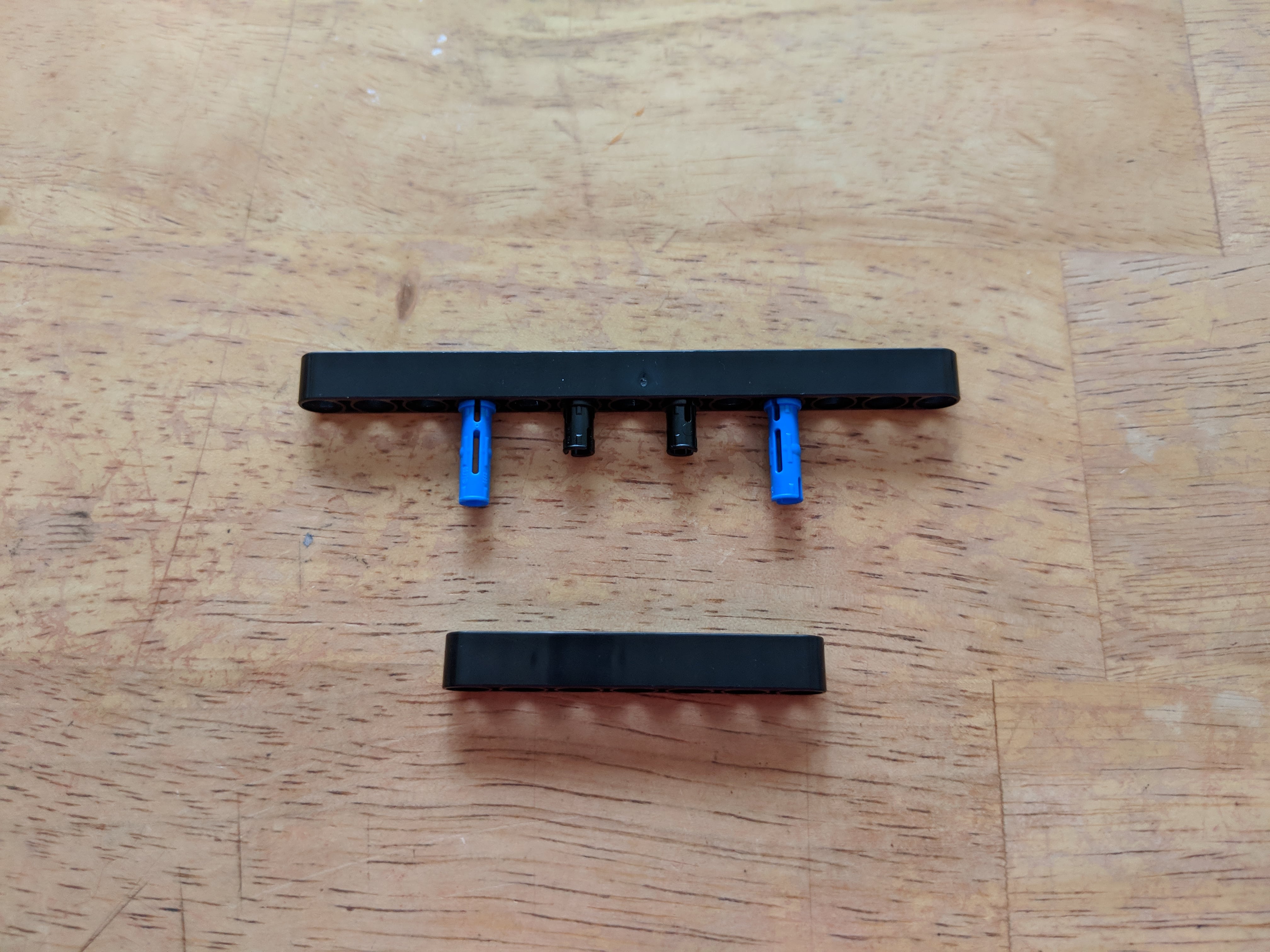
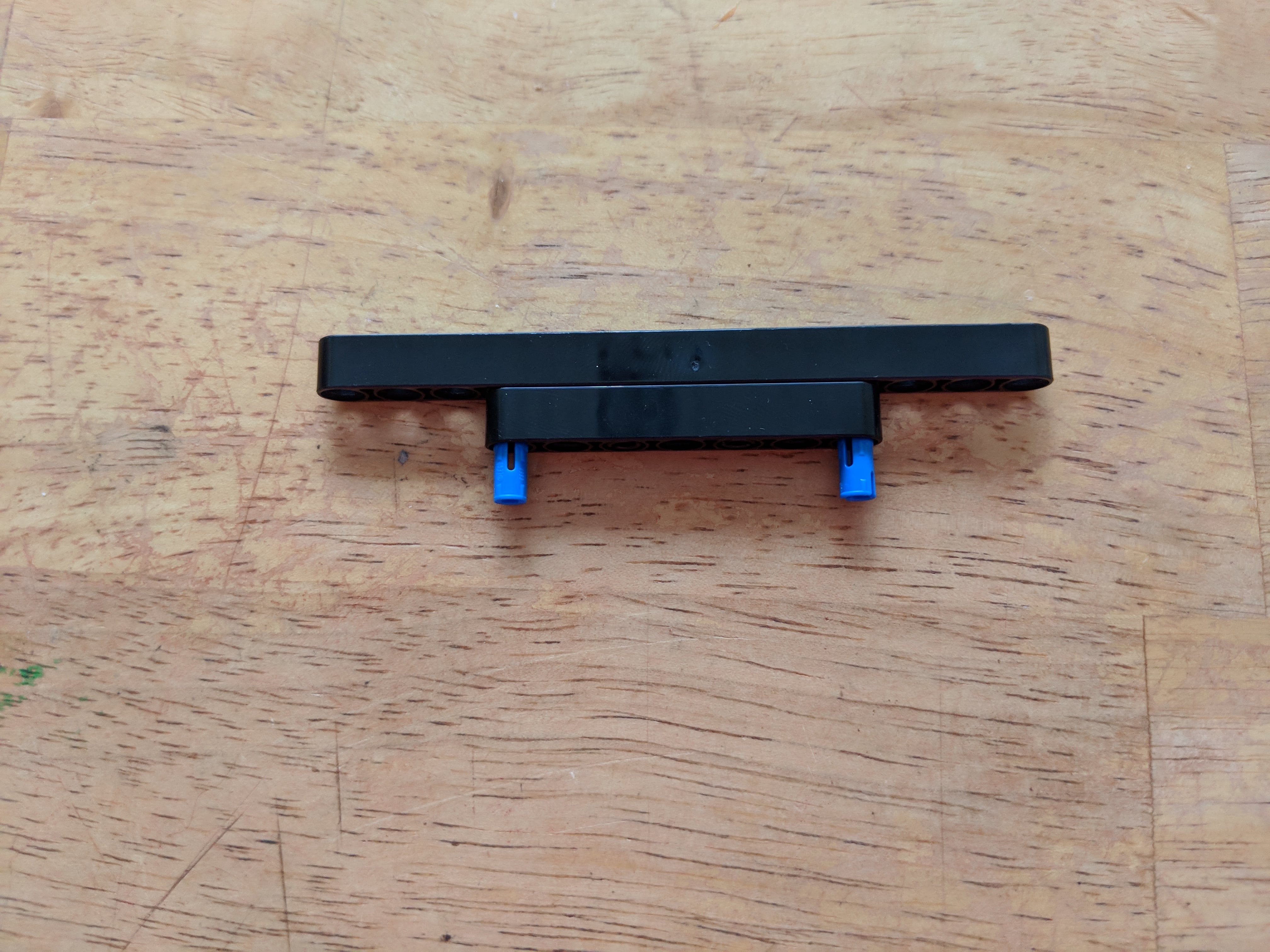
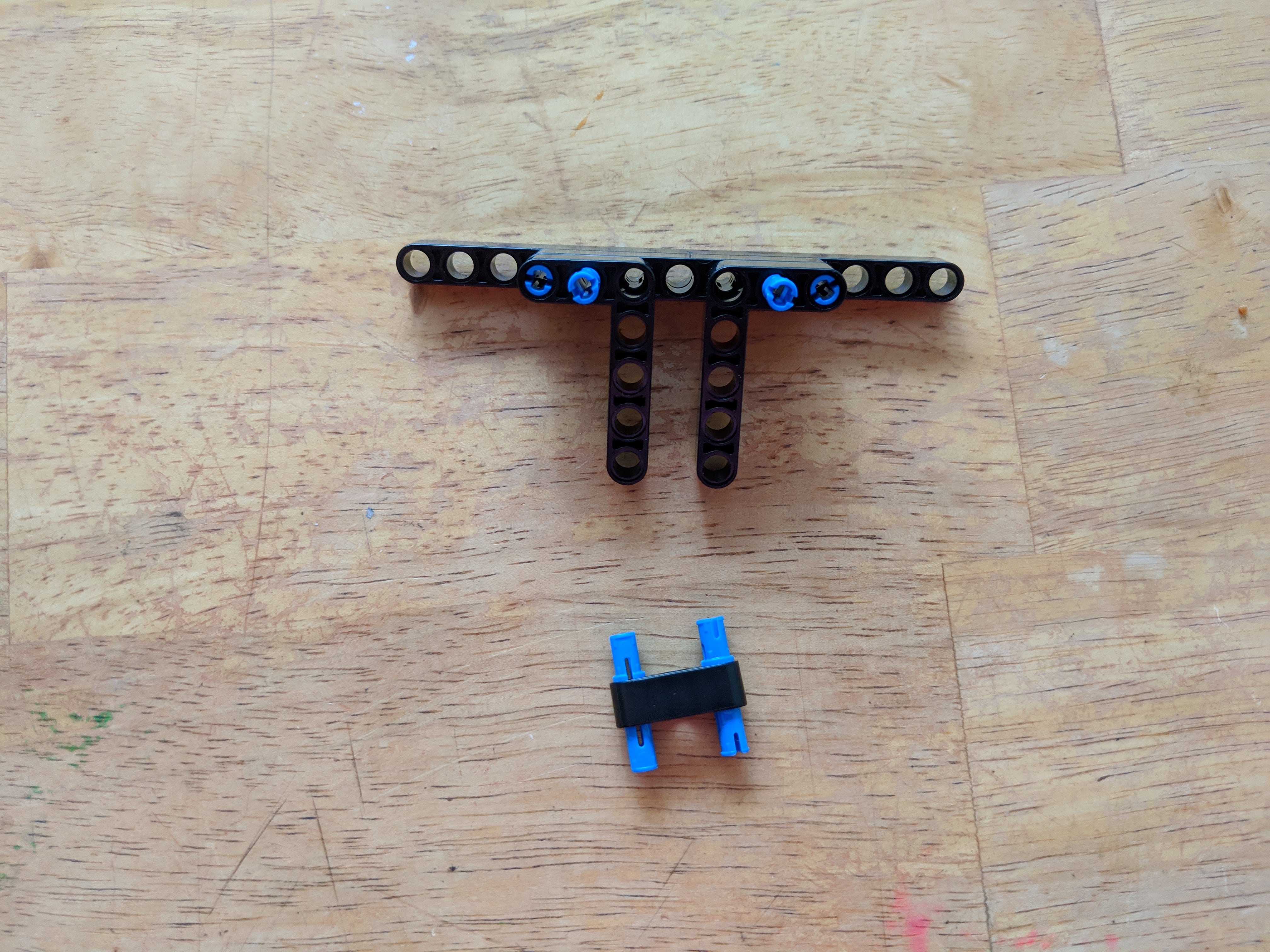
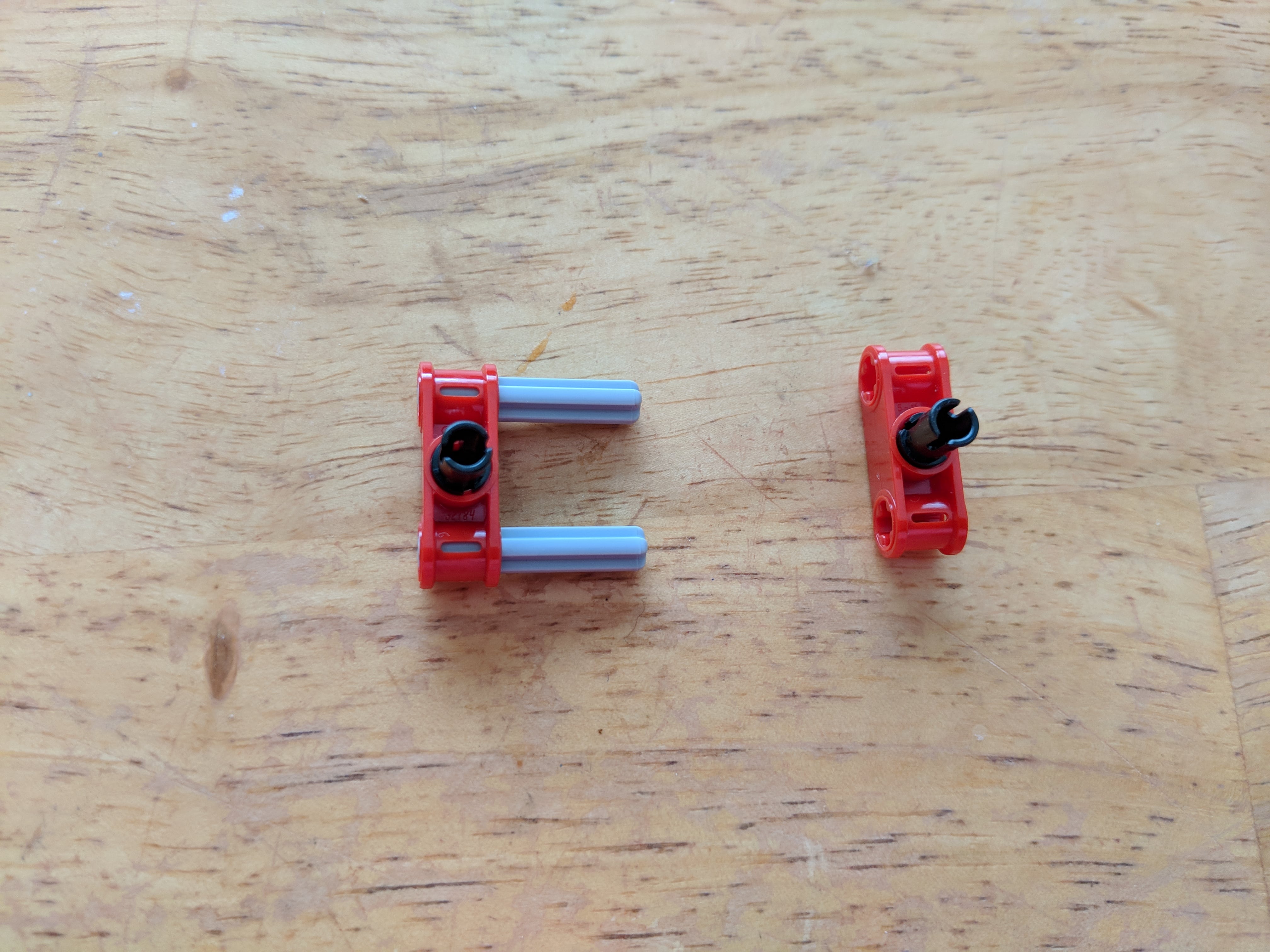
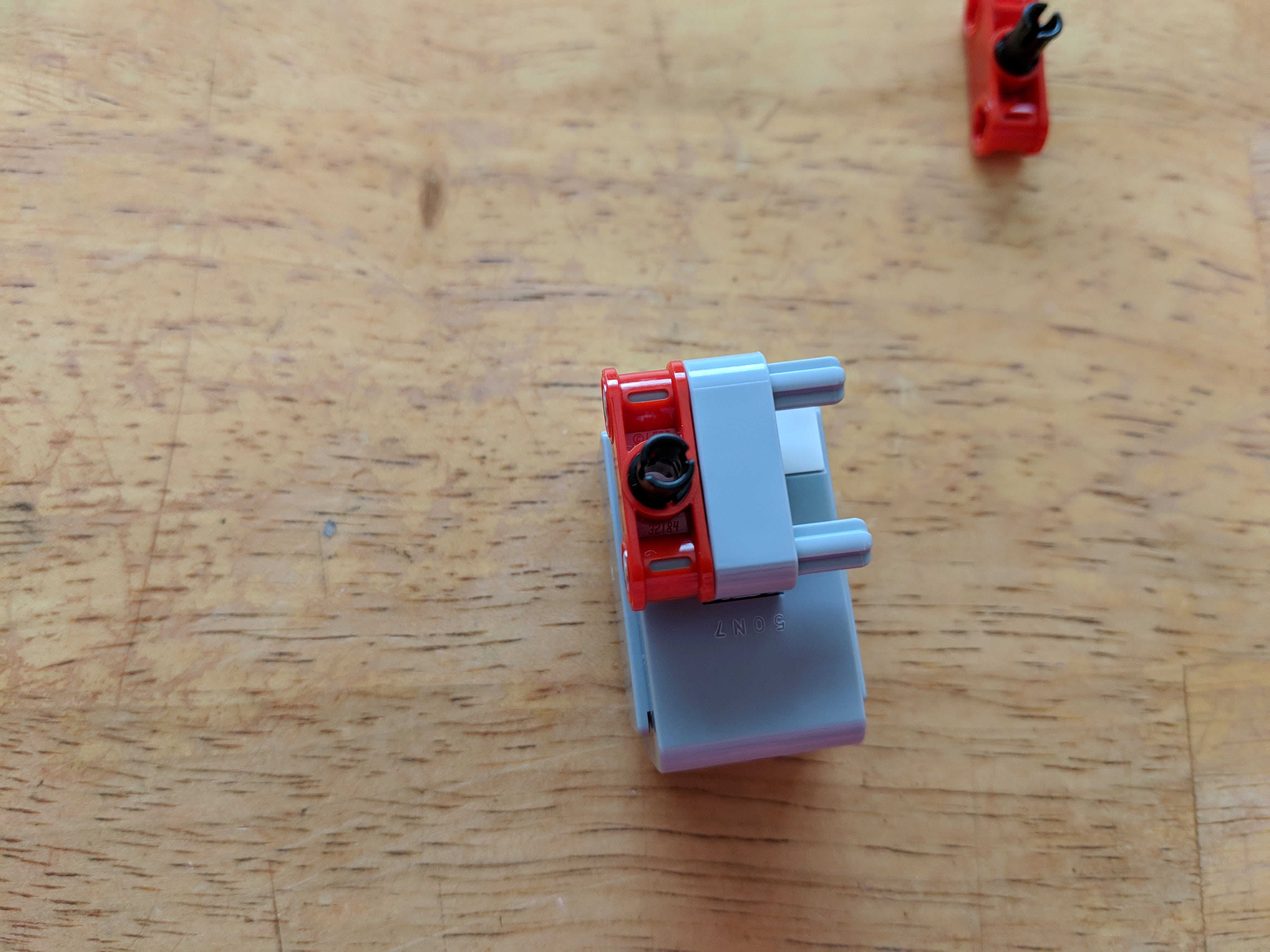
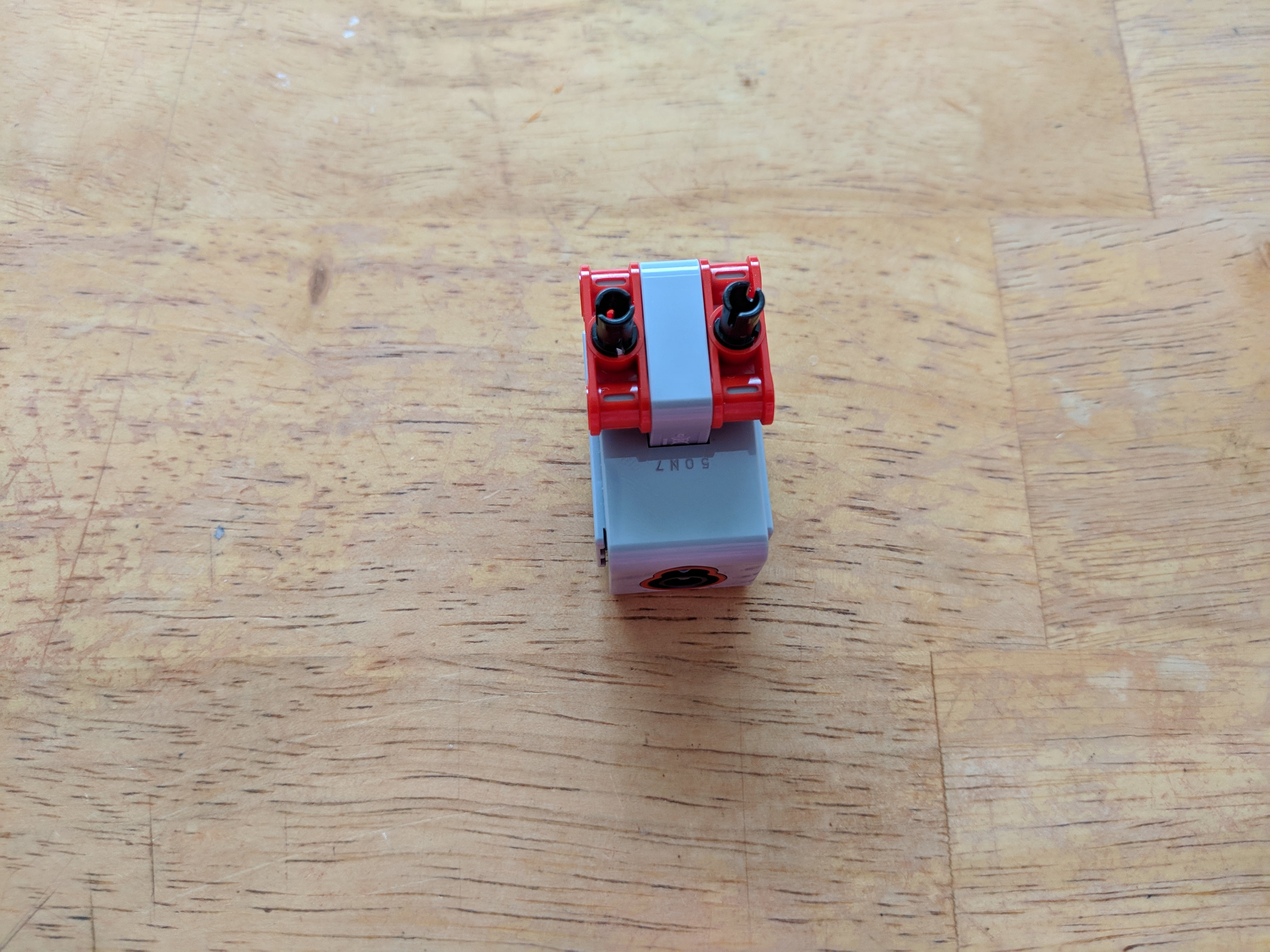
Motor Module
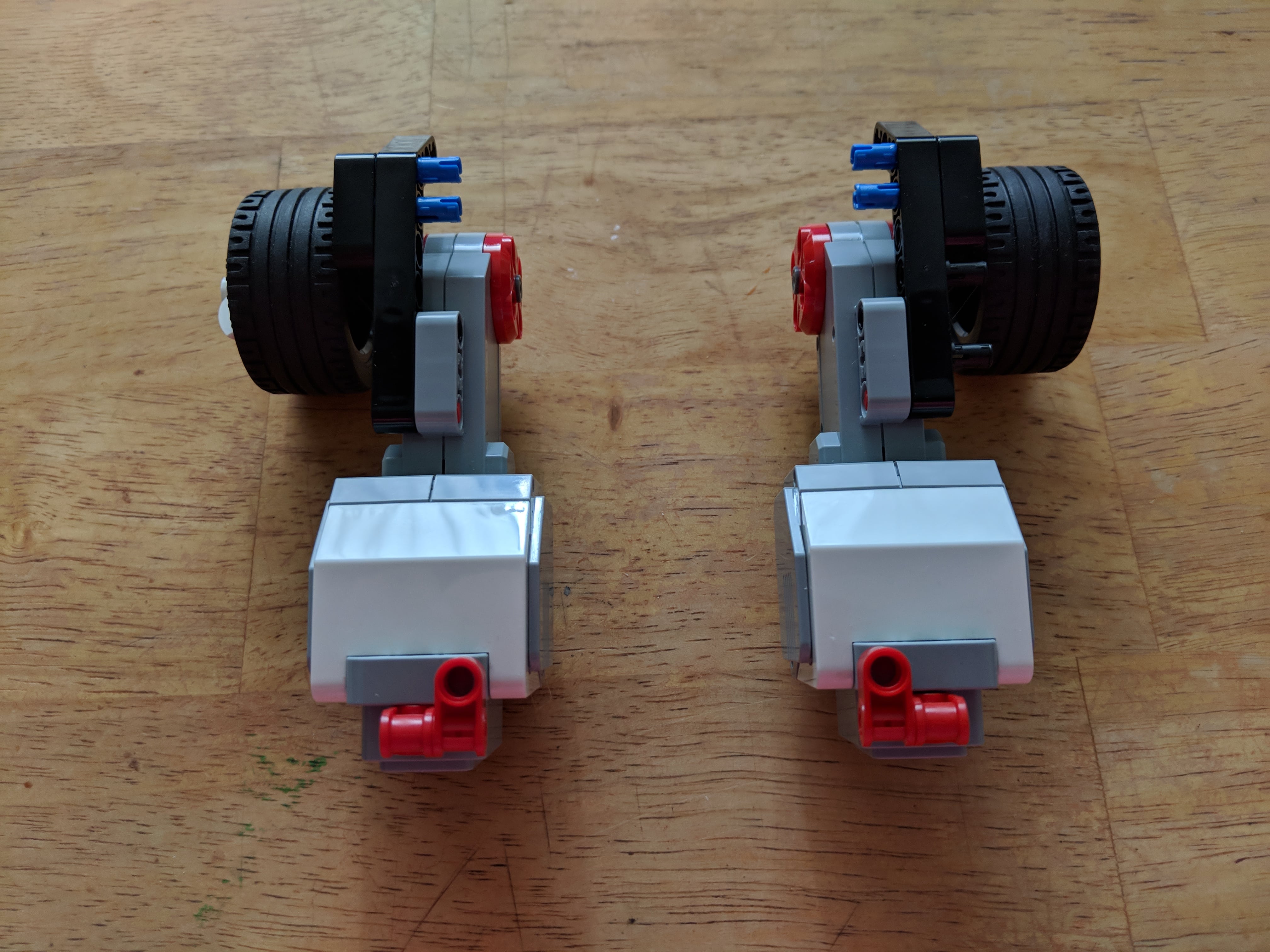
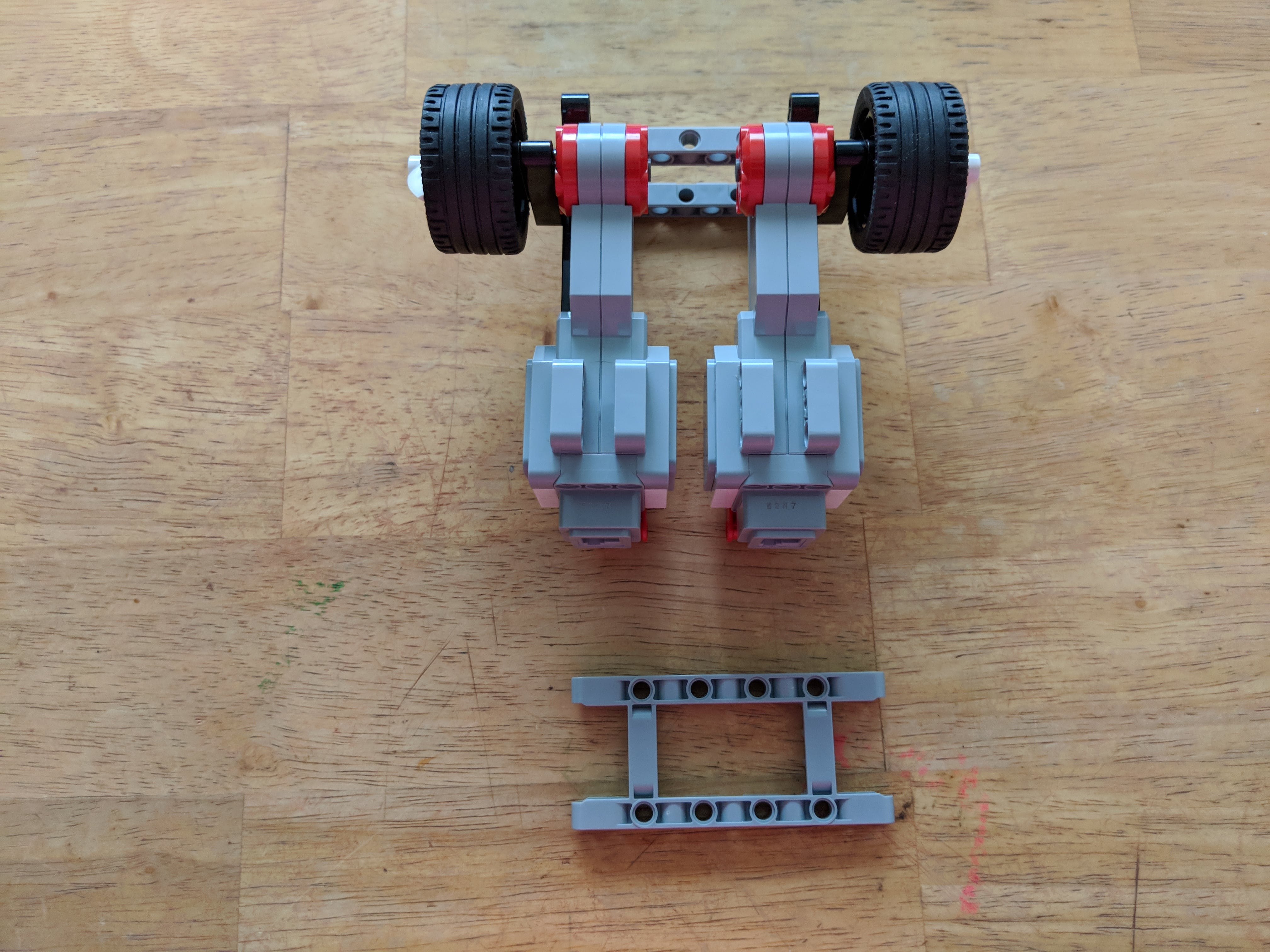
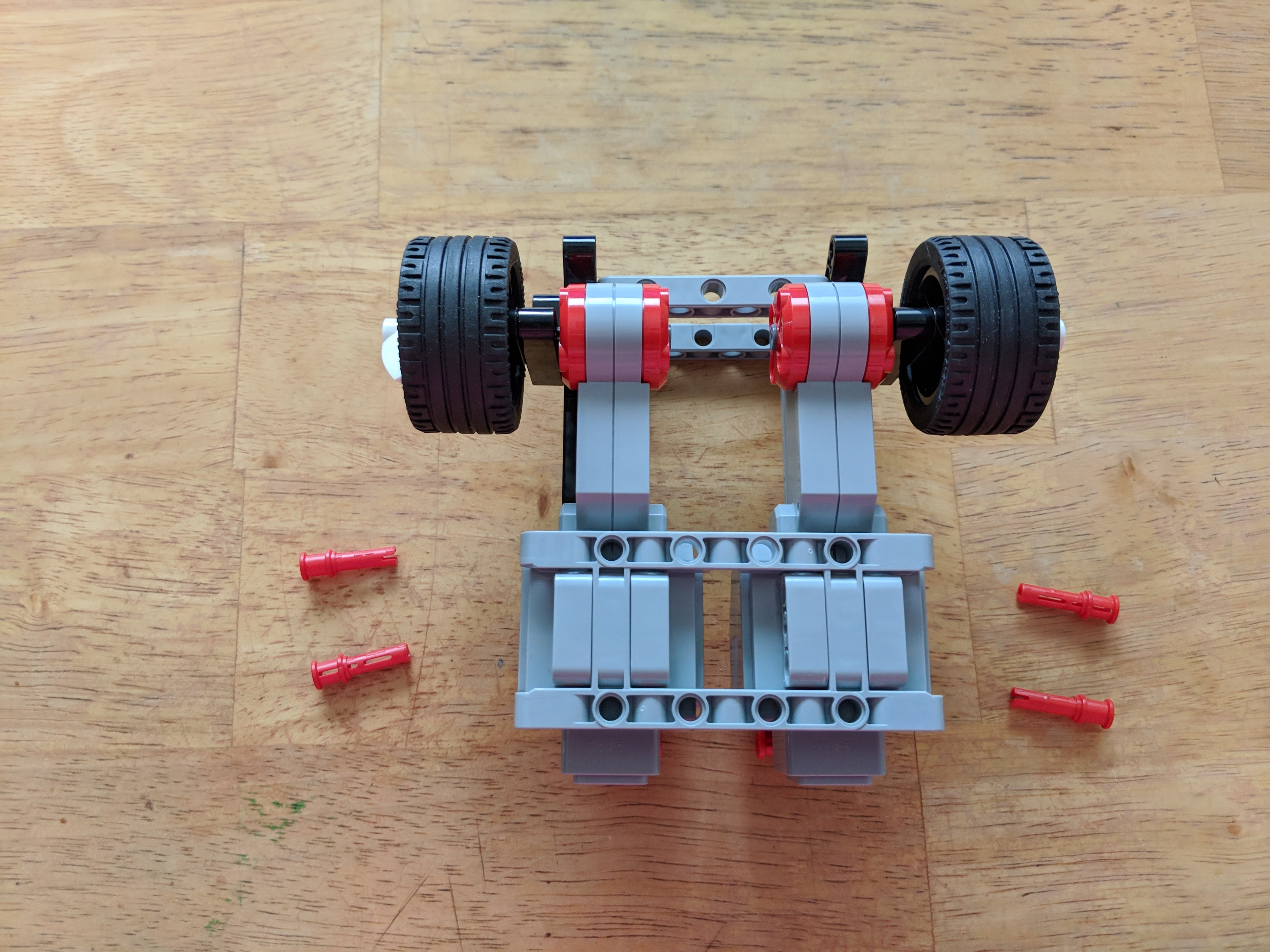
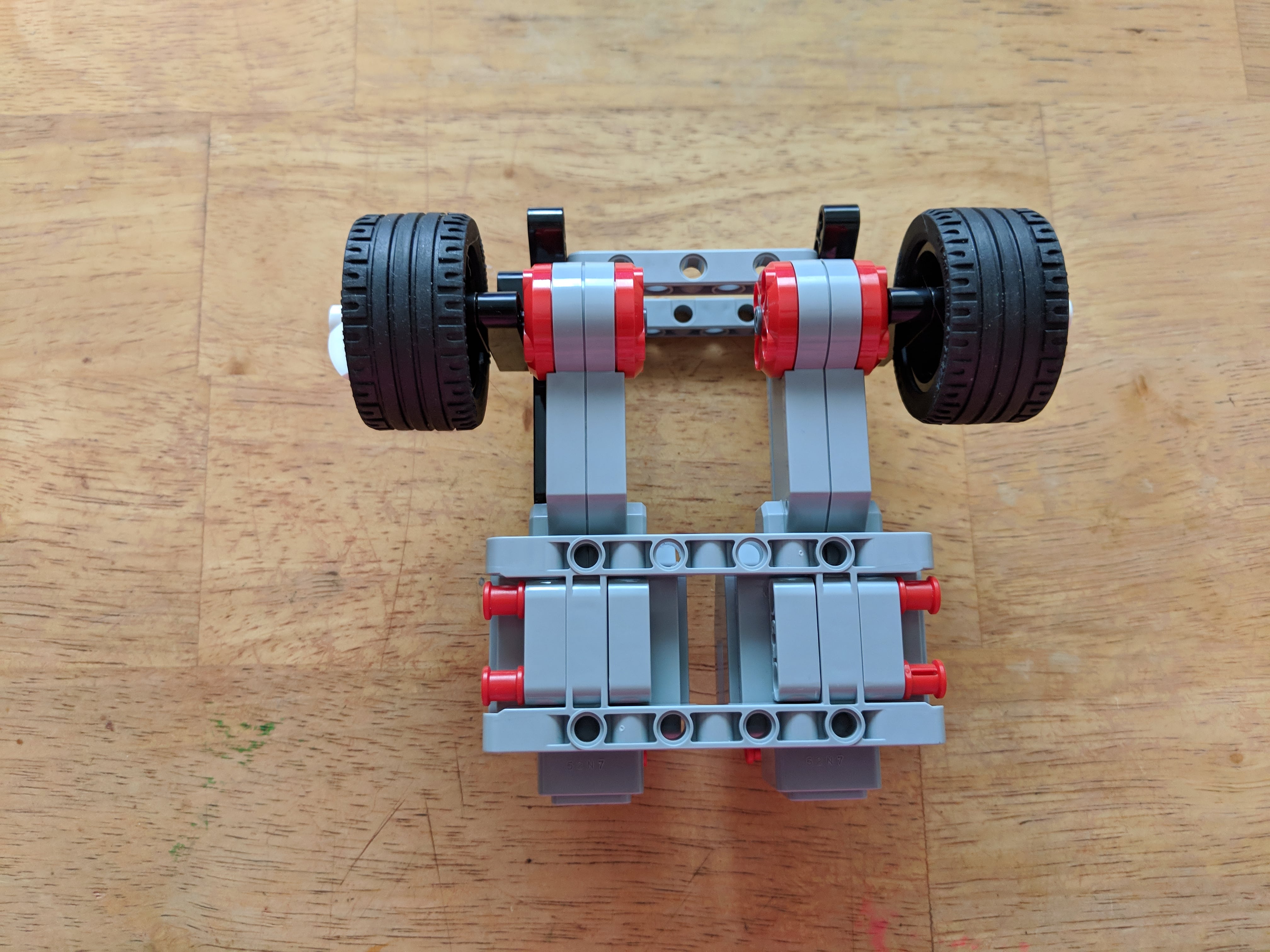
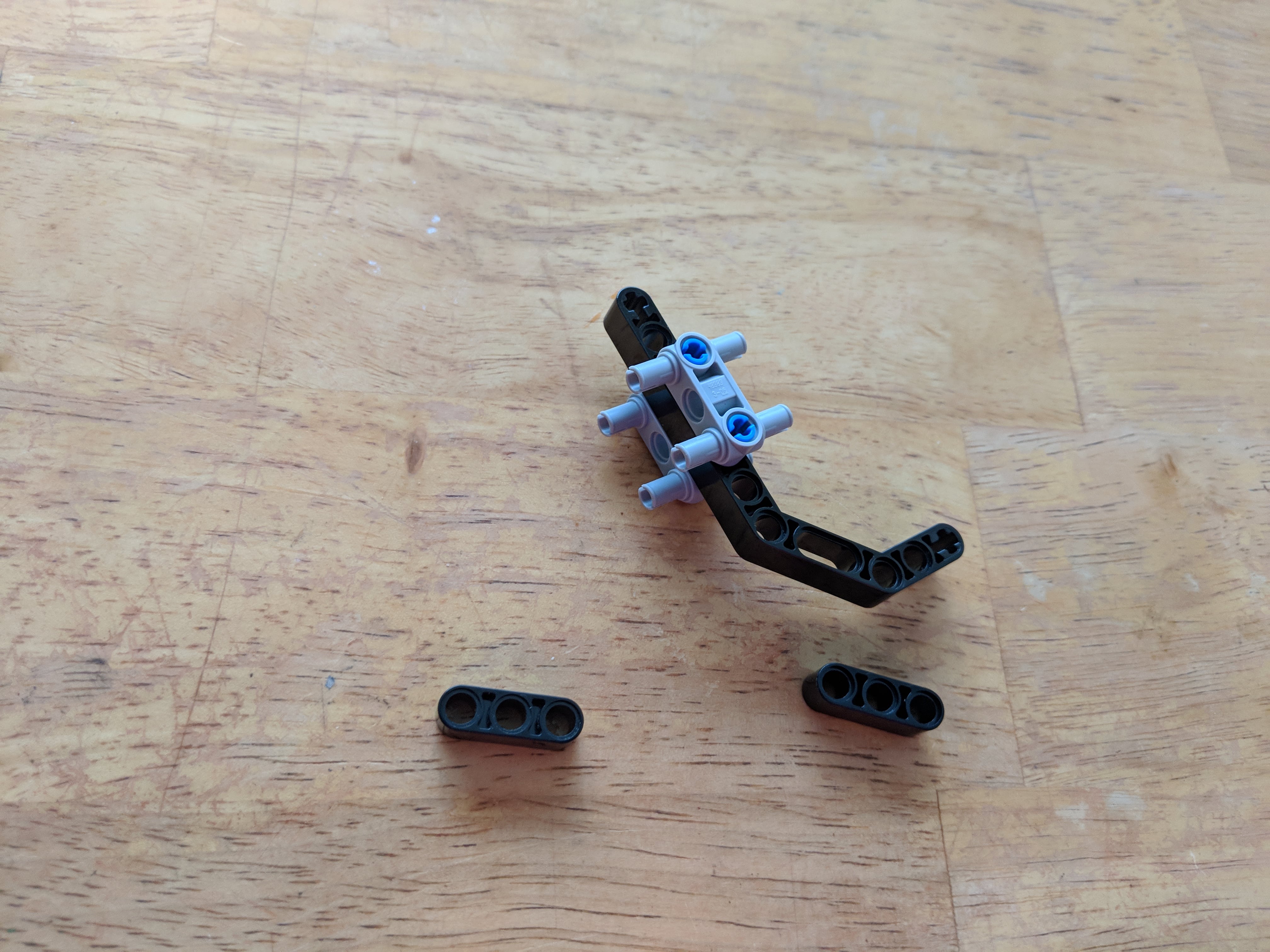
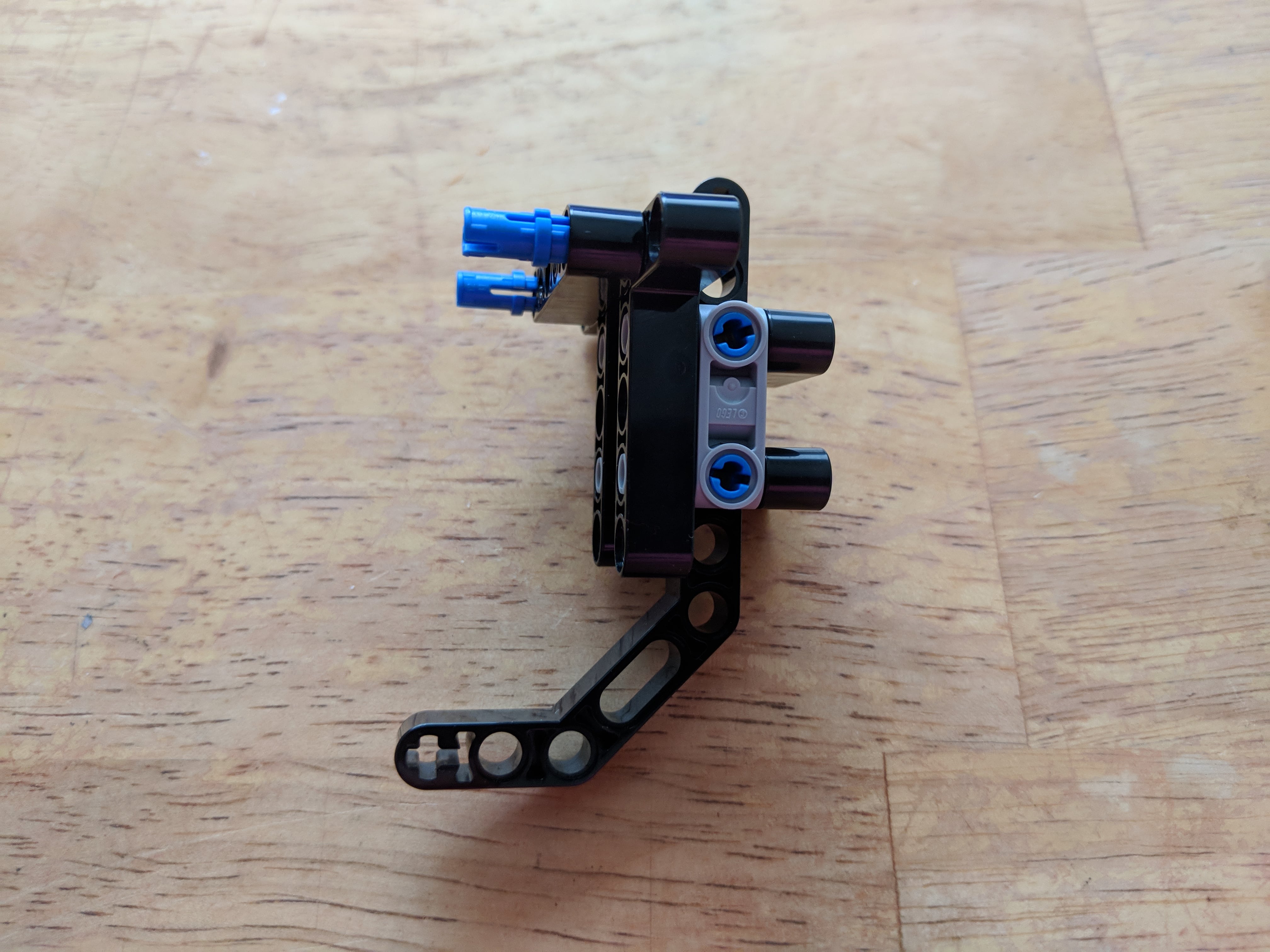
First Motor Assembly



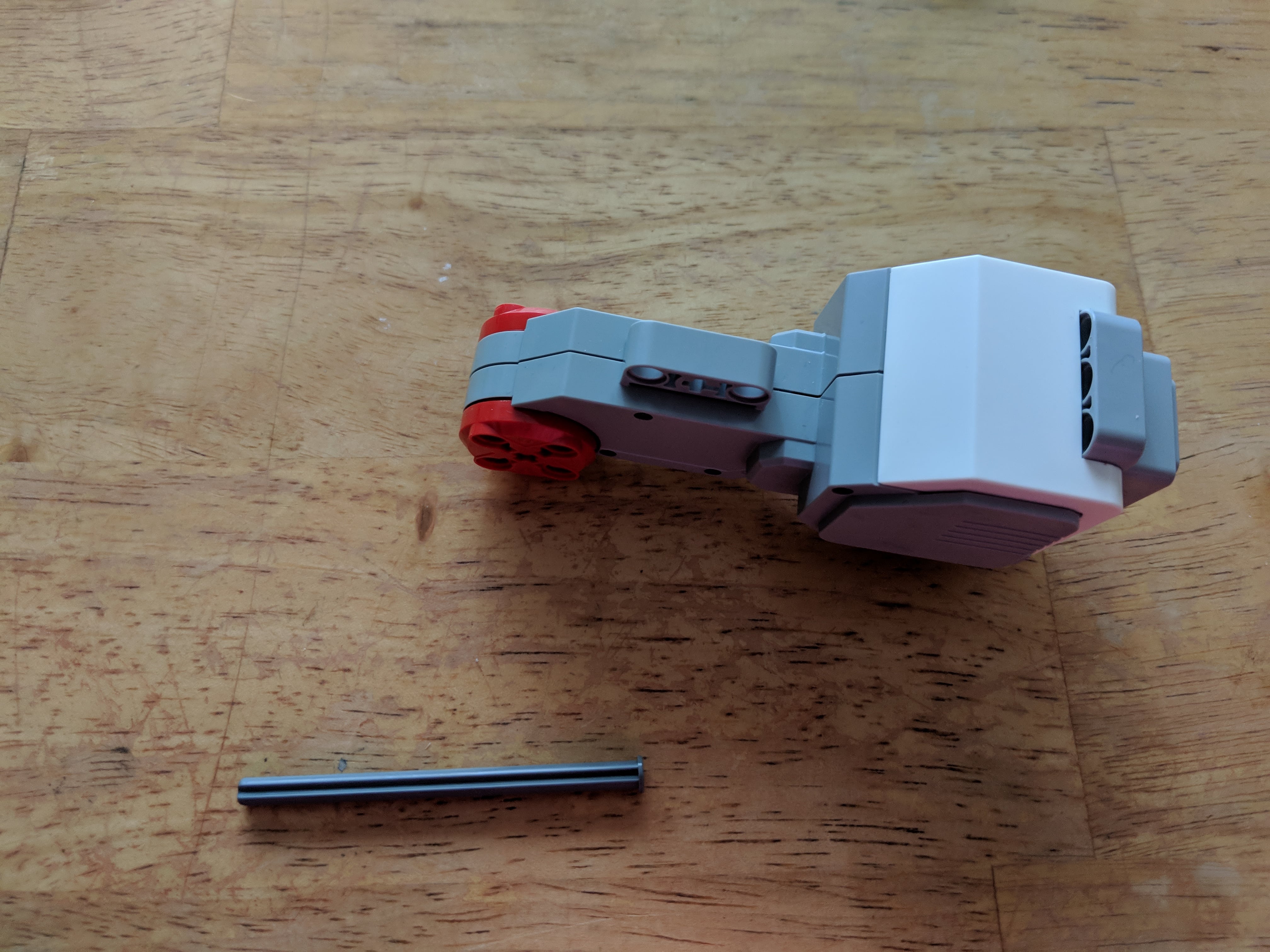
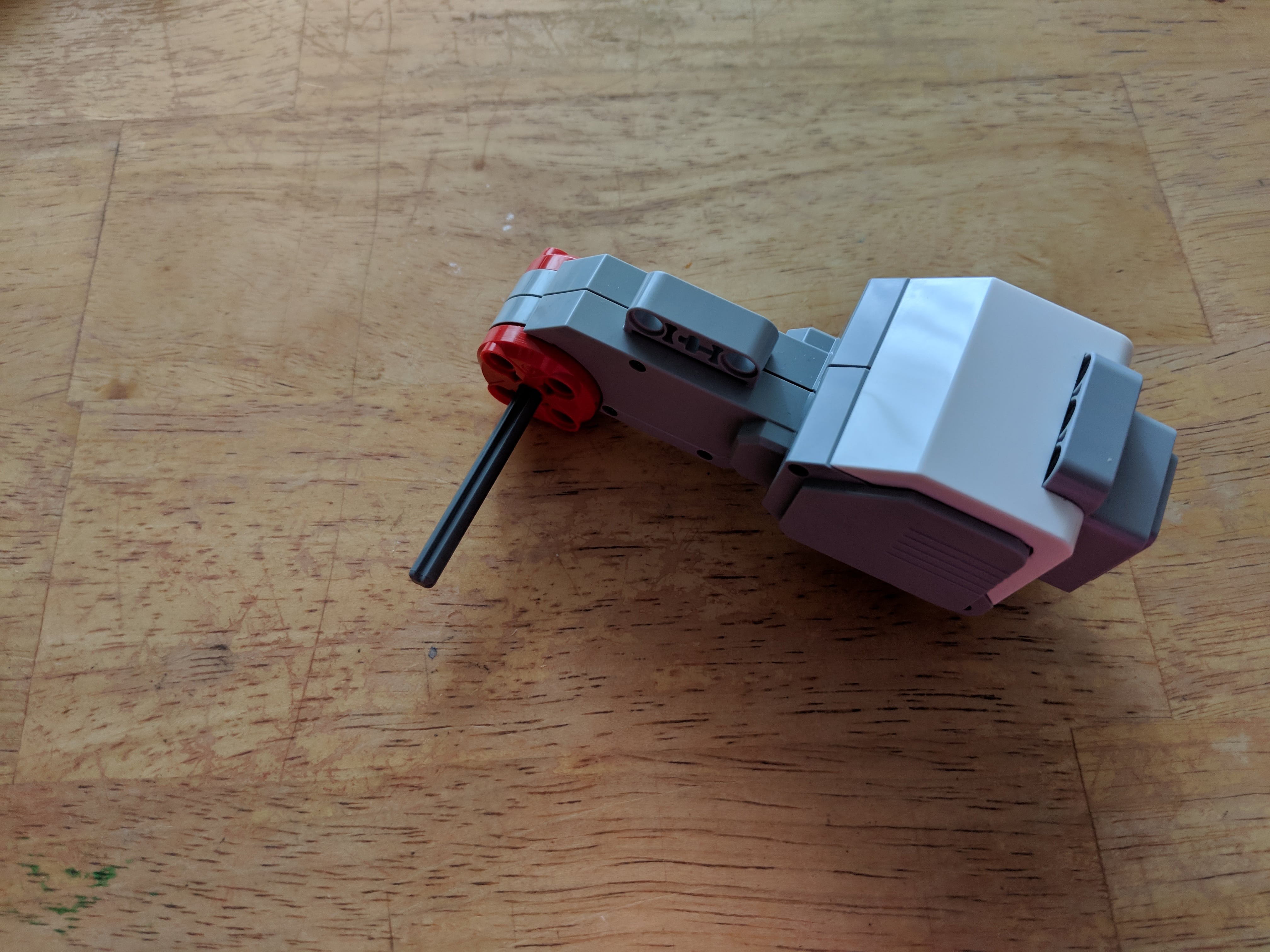

Second Motor Assembly
Build a second motor assembly as a mirror image of the first.
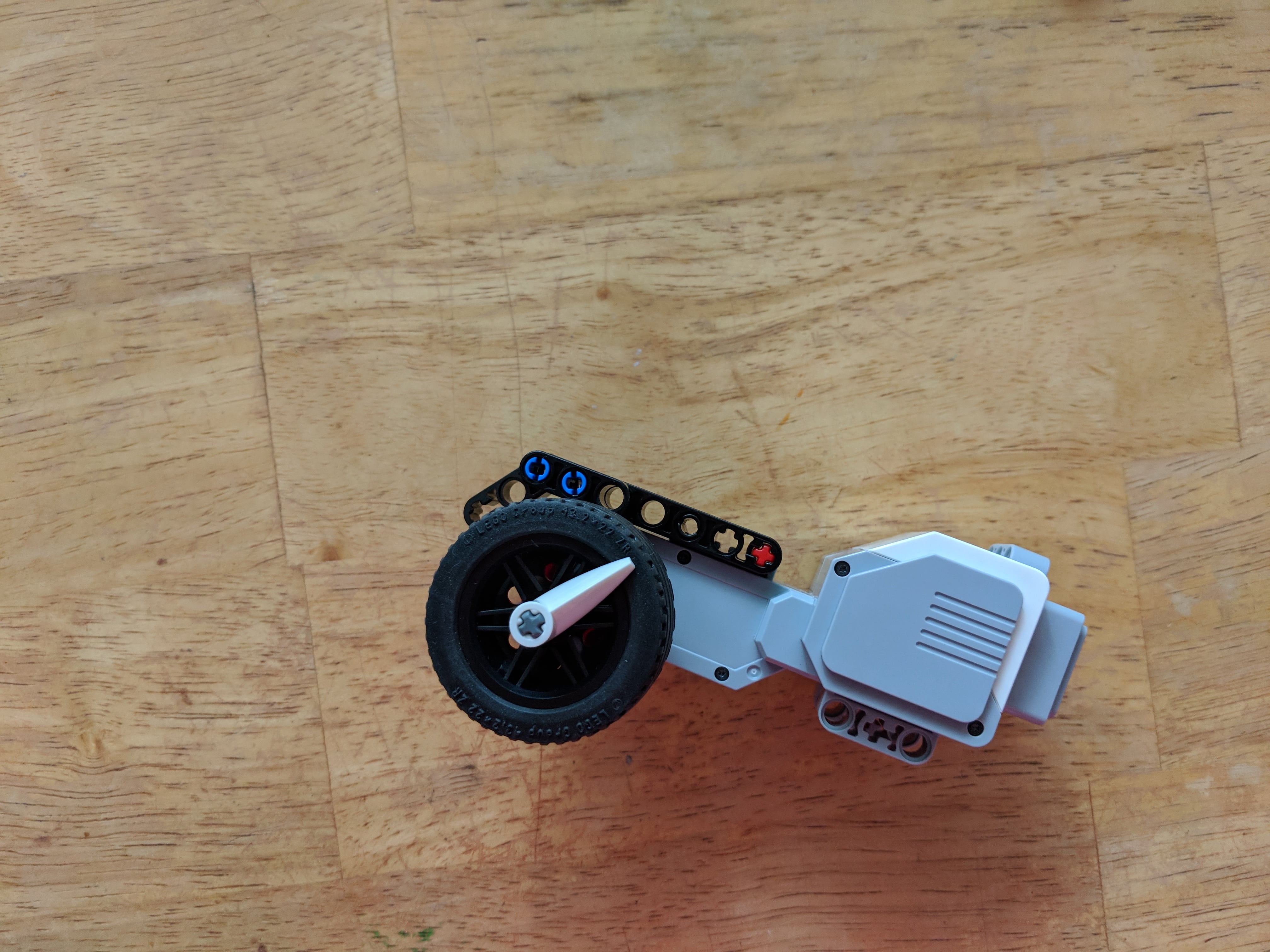
Rear Skid Assembly



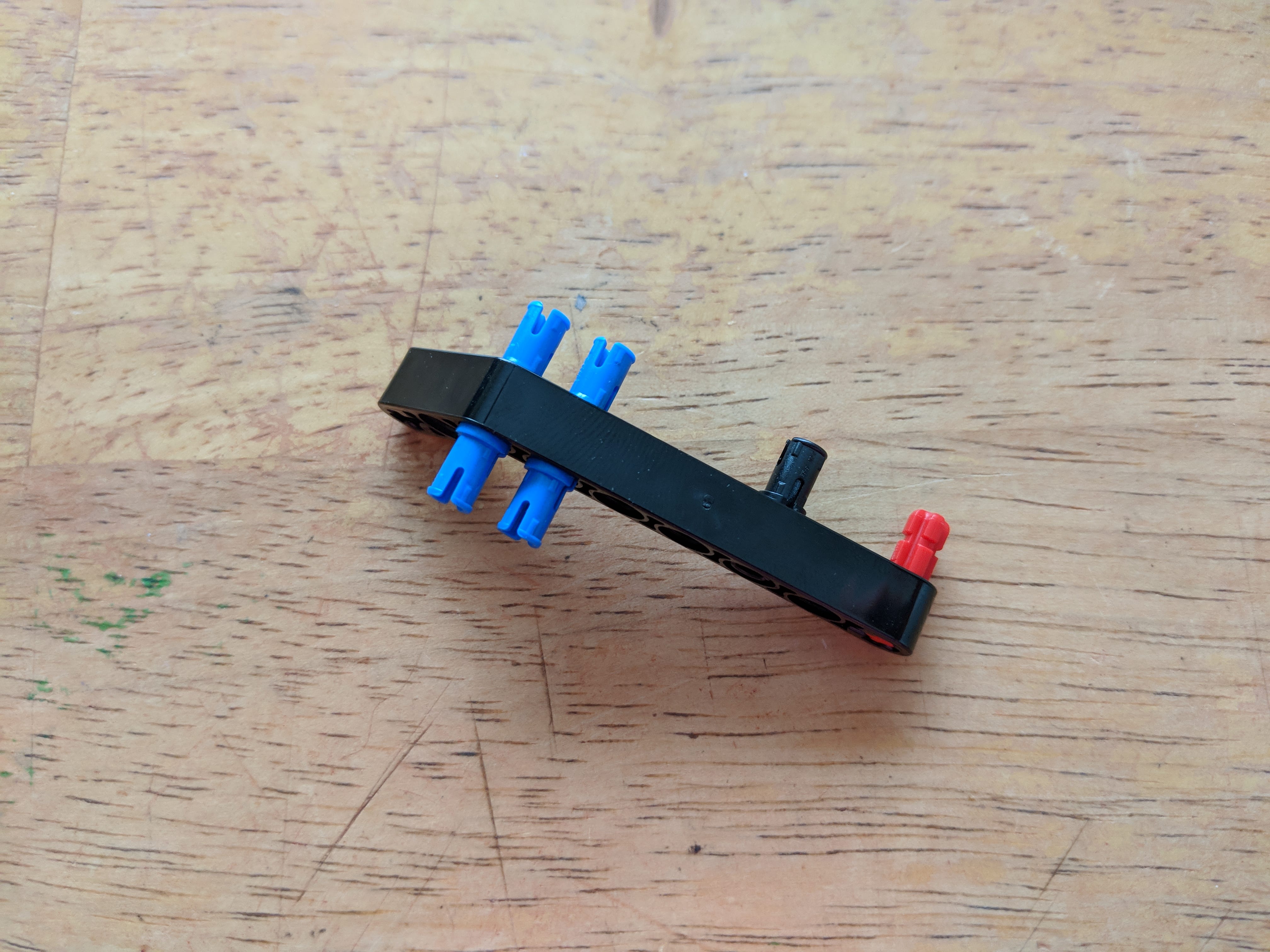
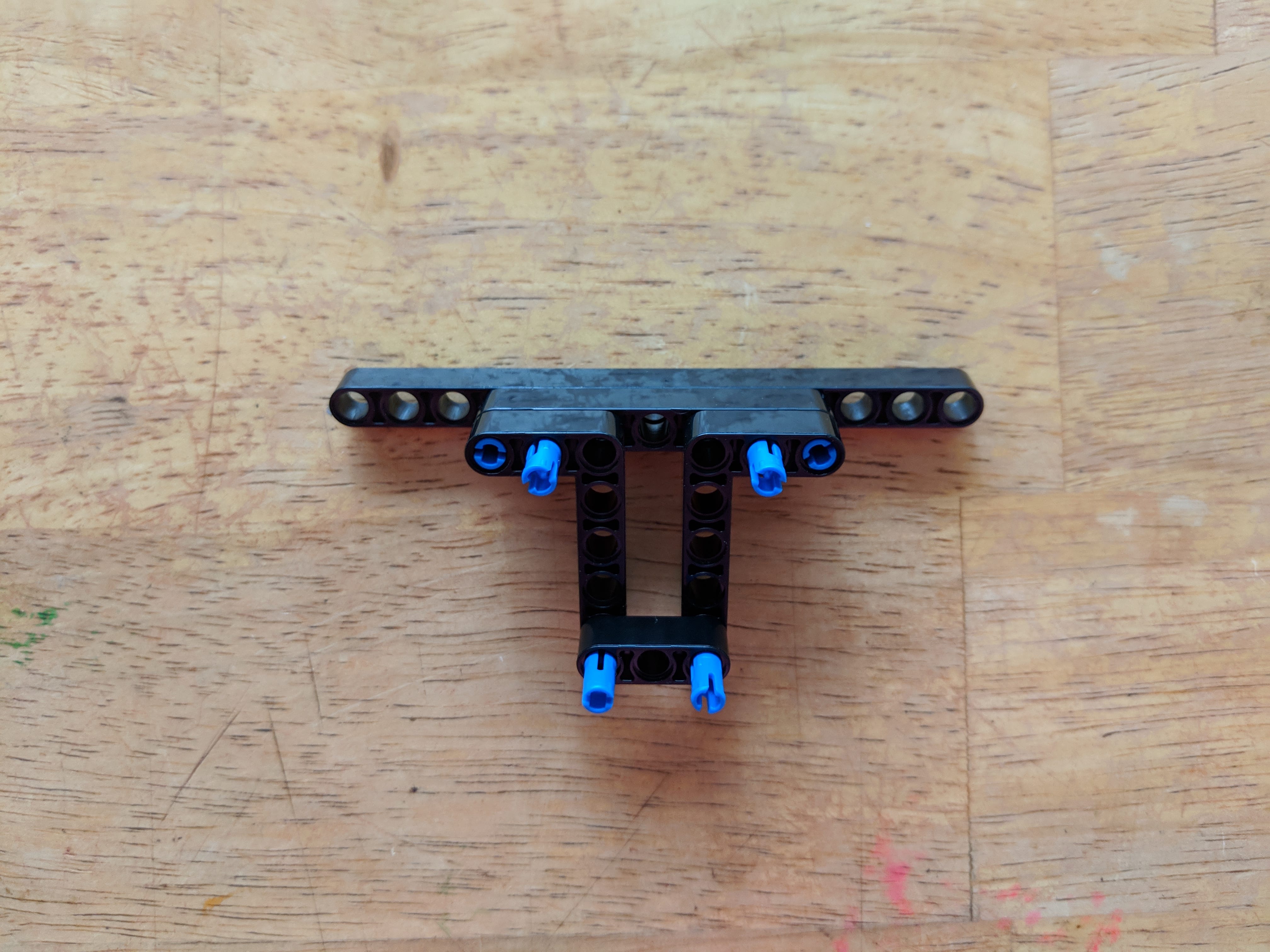
Bumper Assembly
First Bumper Assembly

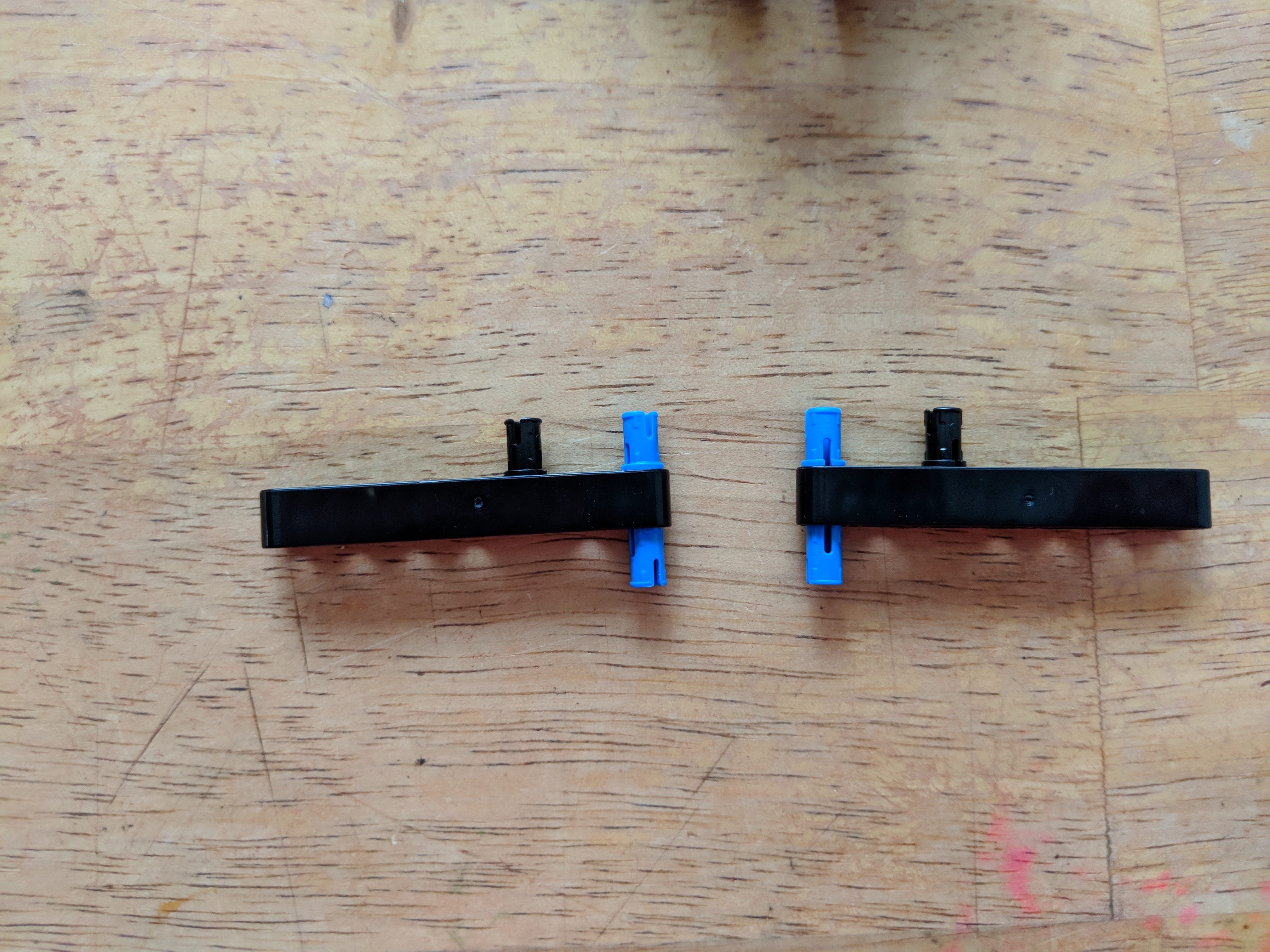
Second Bumper Assembly
Build a second front bumper as a mirror image of the first.

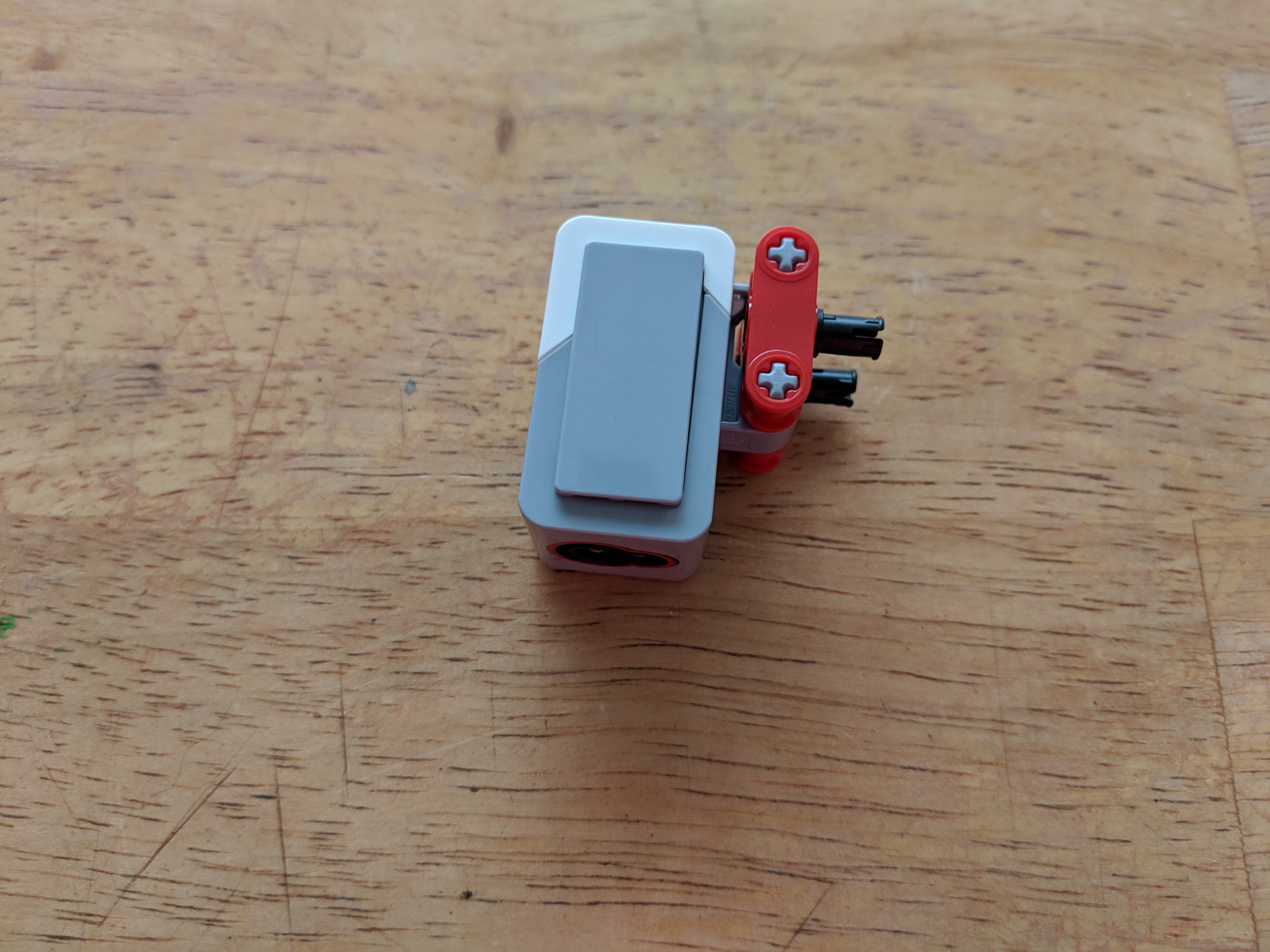
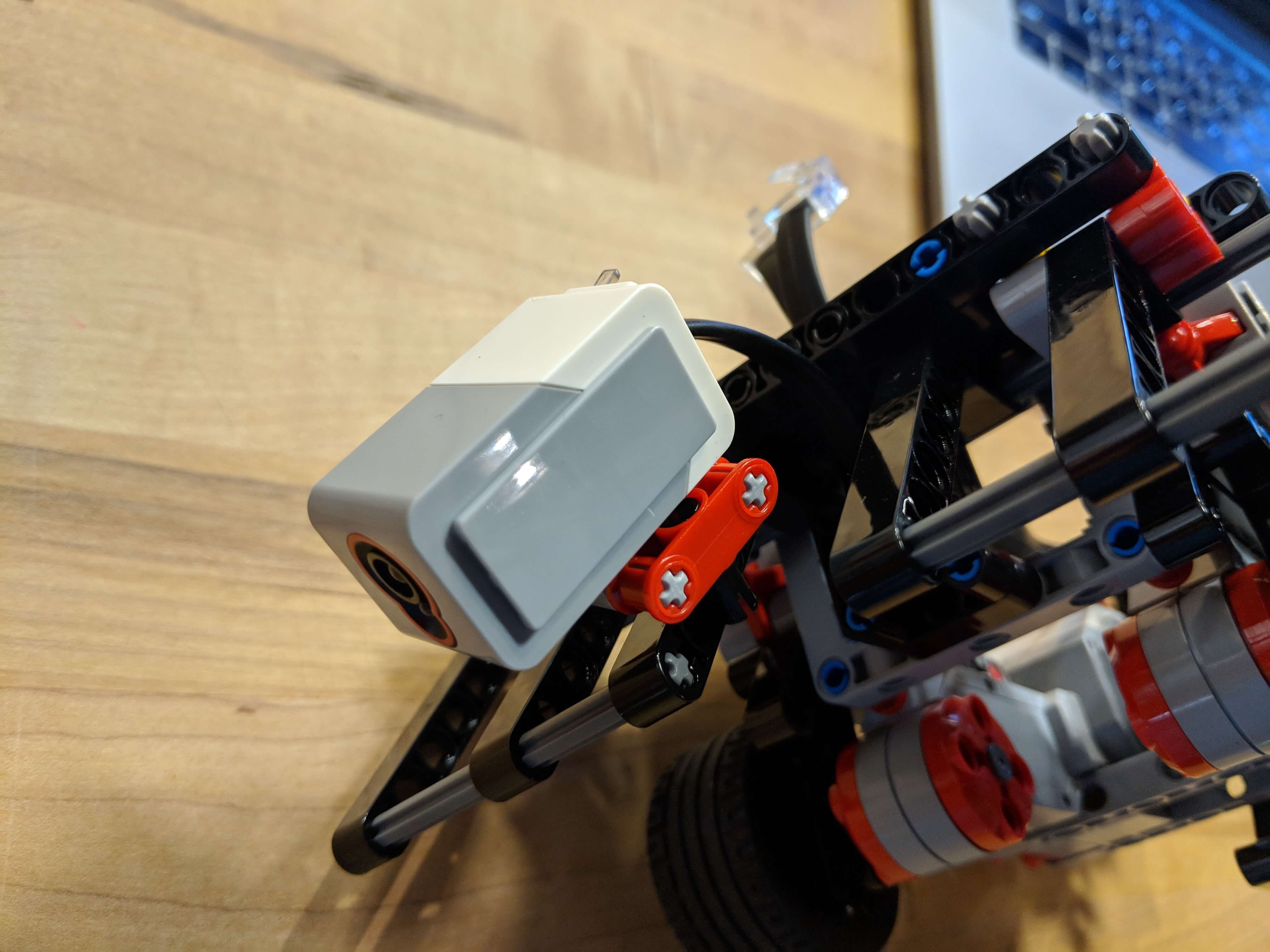
Touch Sensor Module
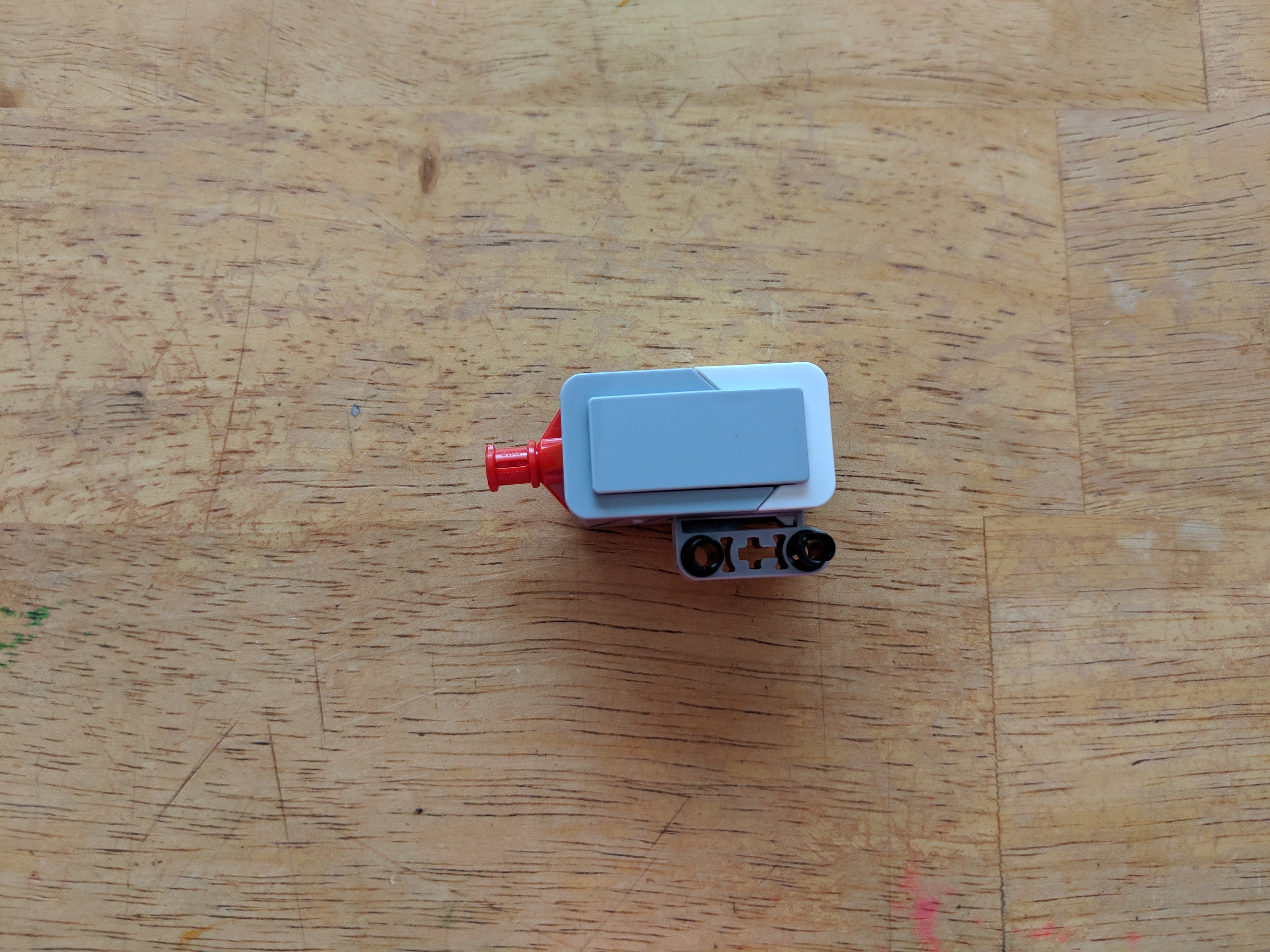
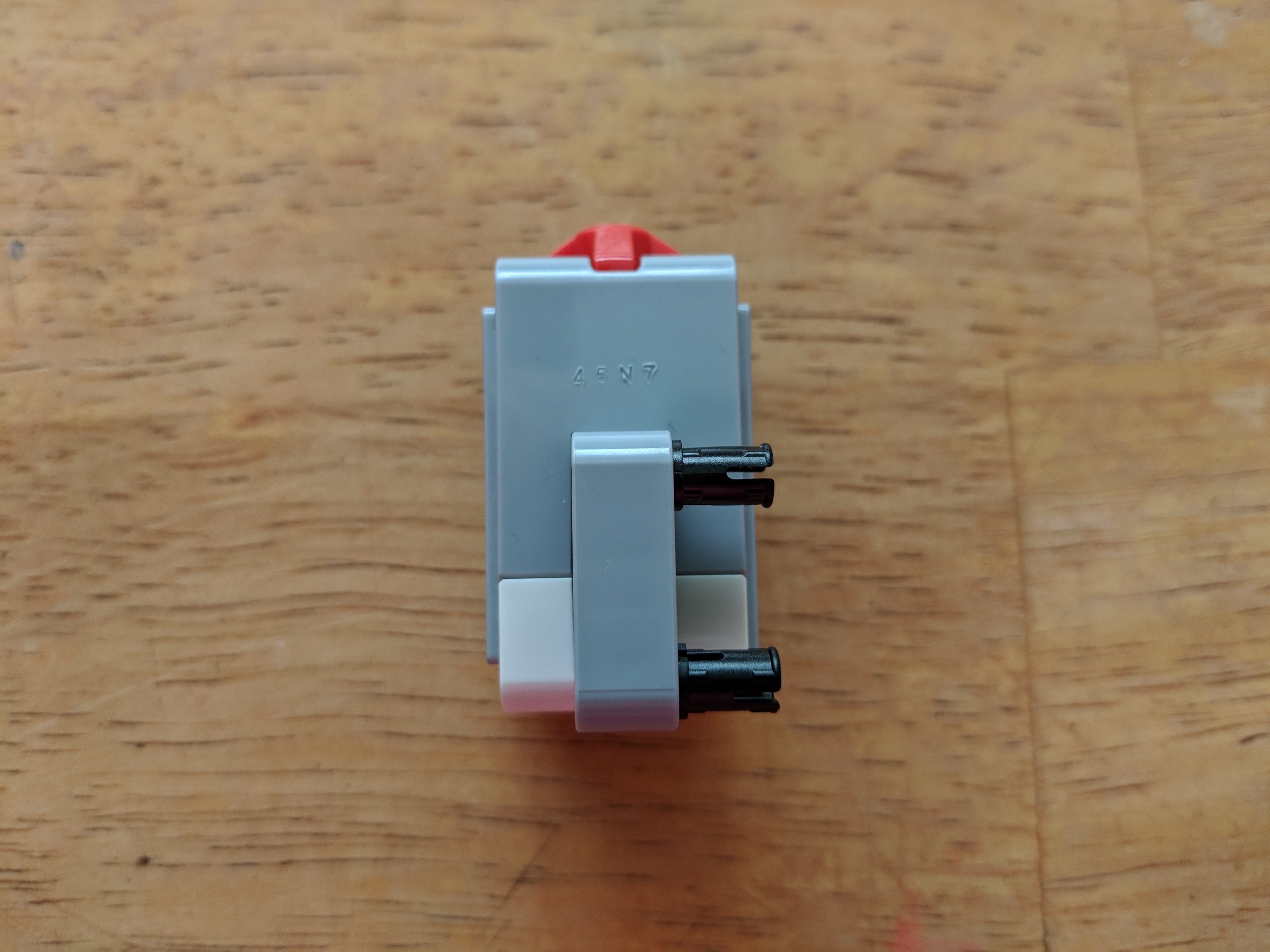

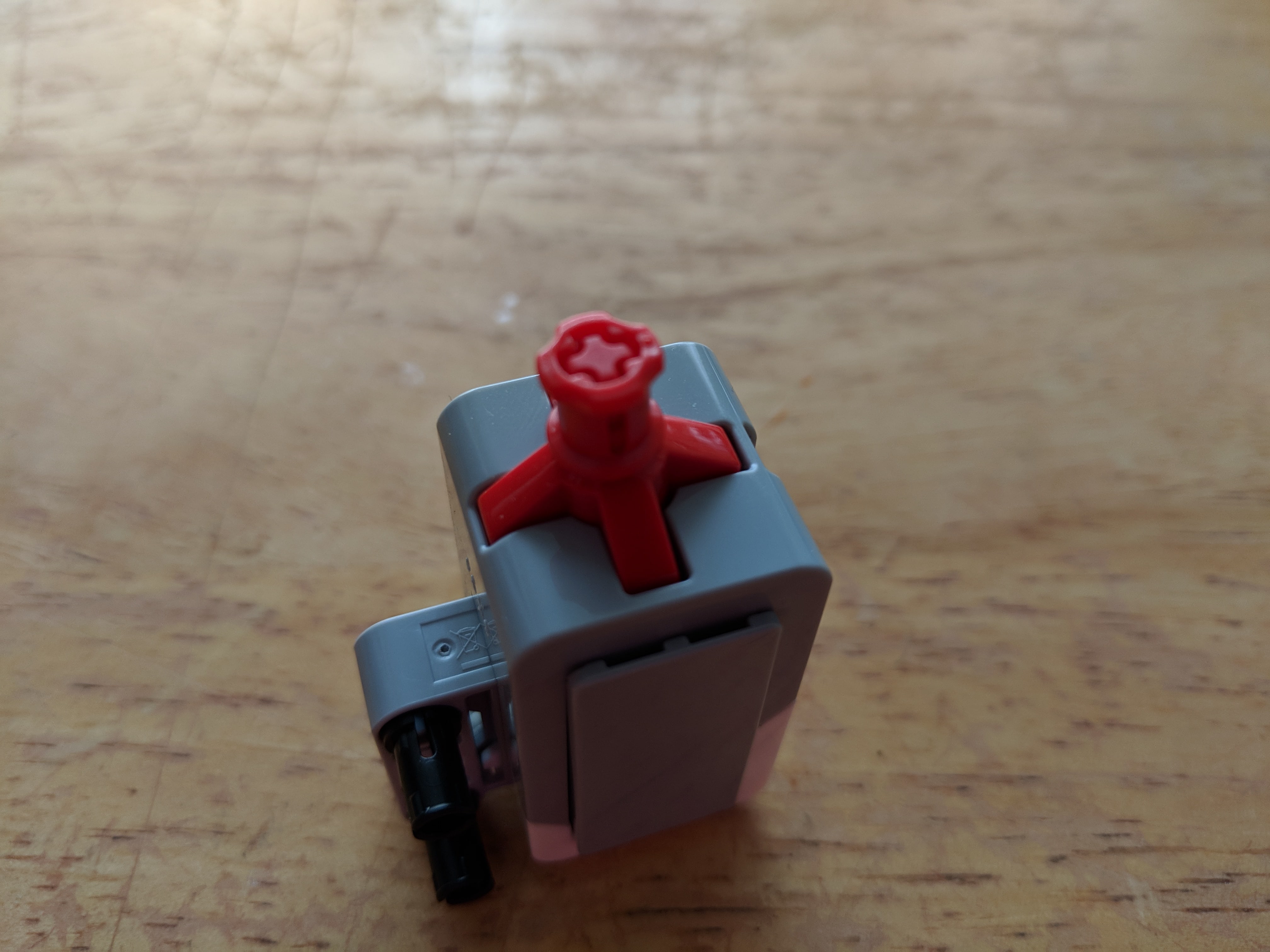
Second Touch Sensor
Build a second touch sensor module as a mirror image of the first.
Light Sensor Module
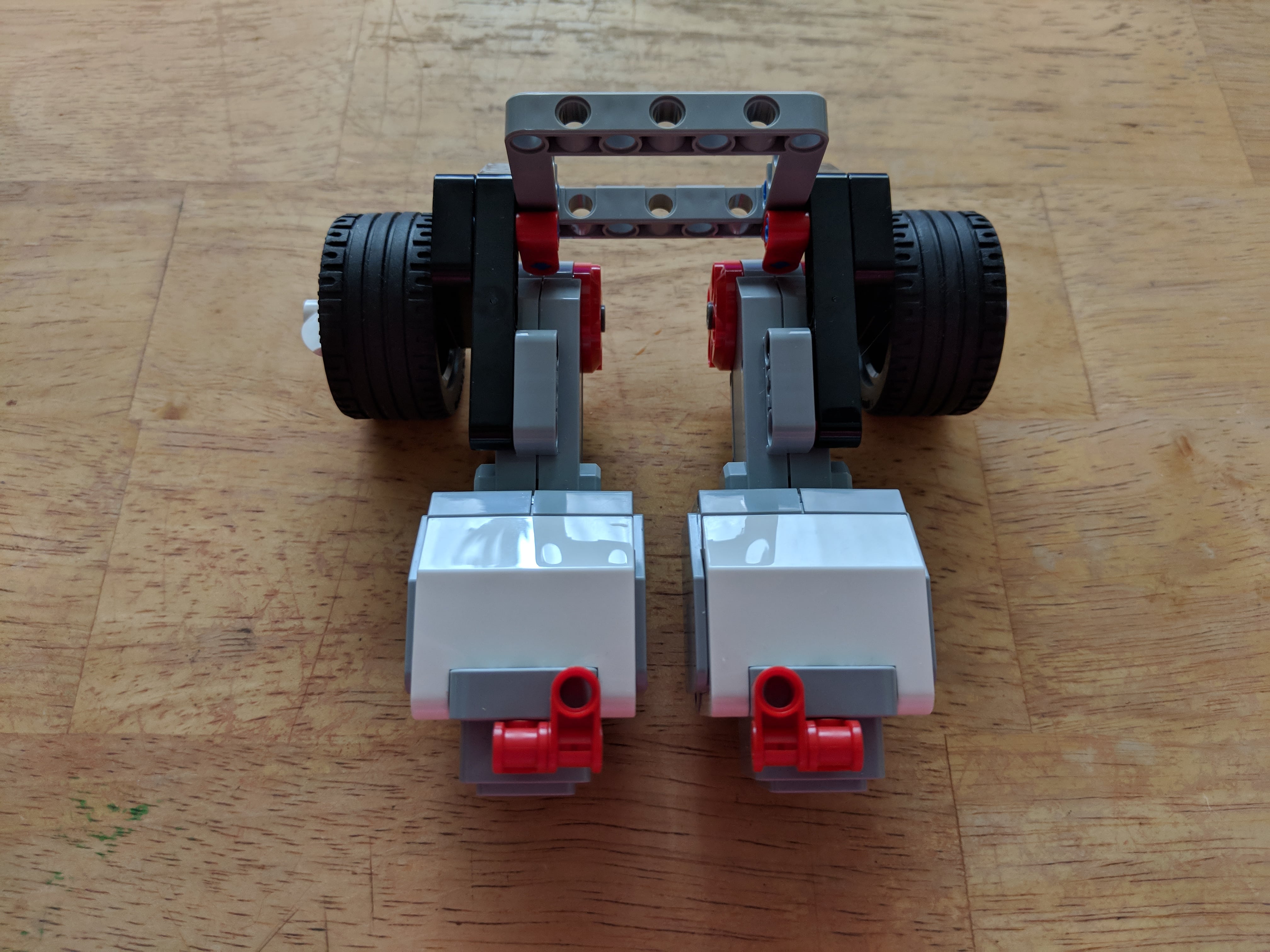
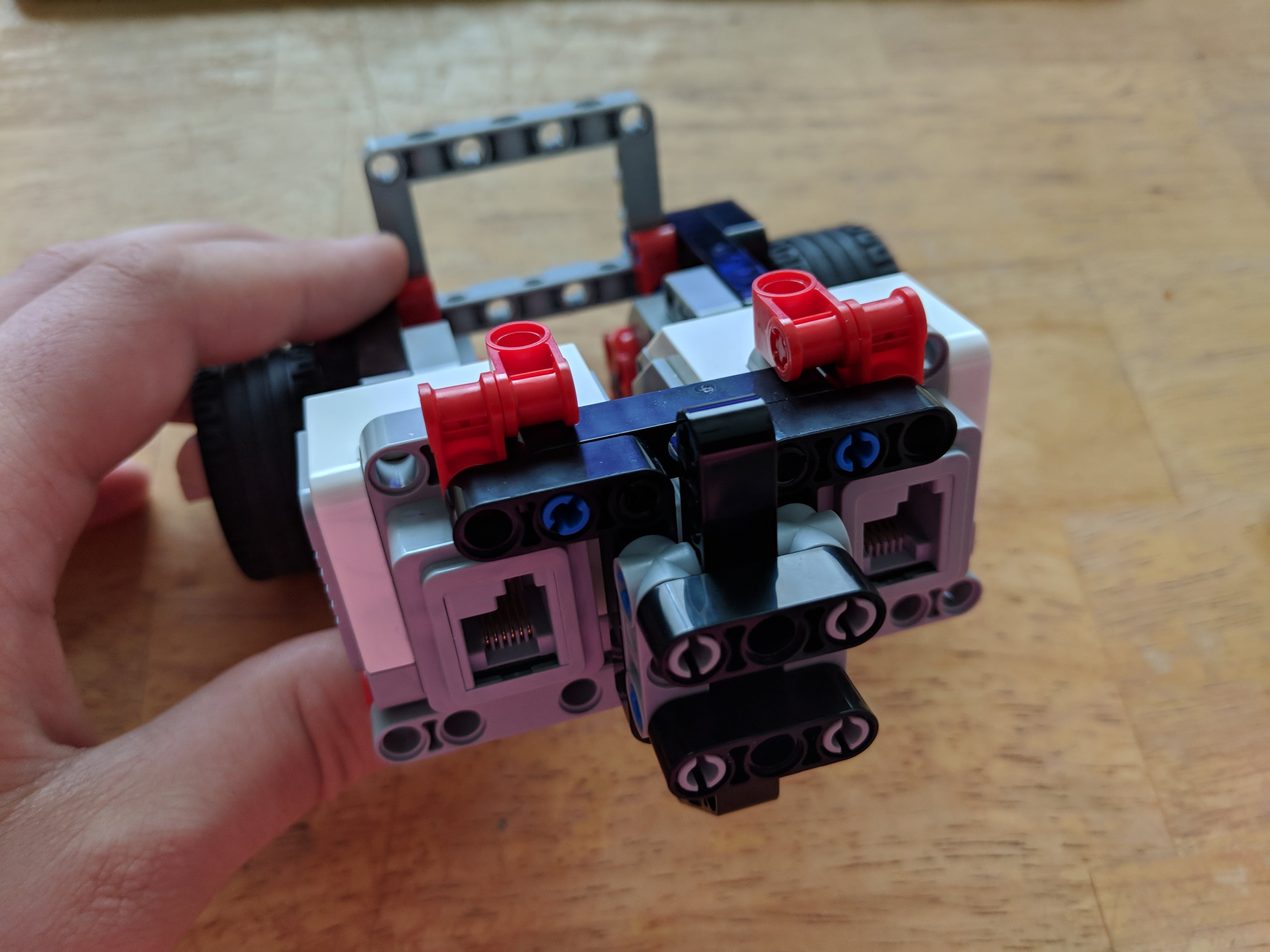
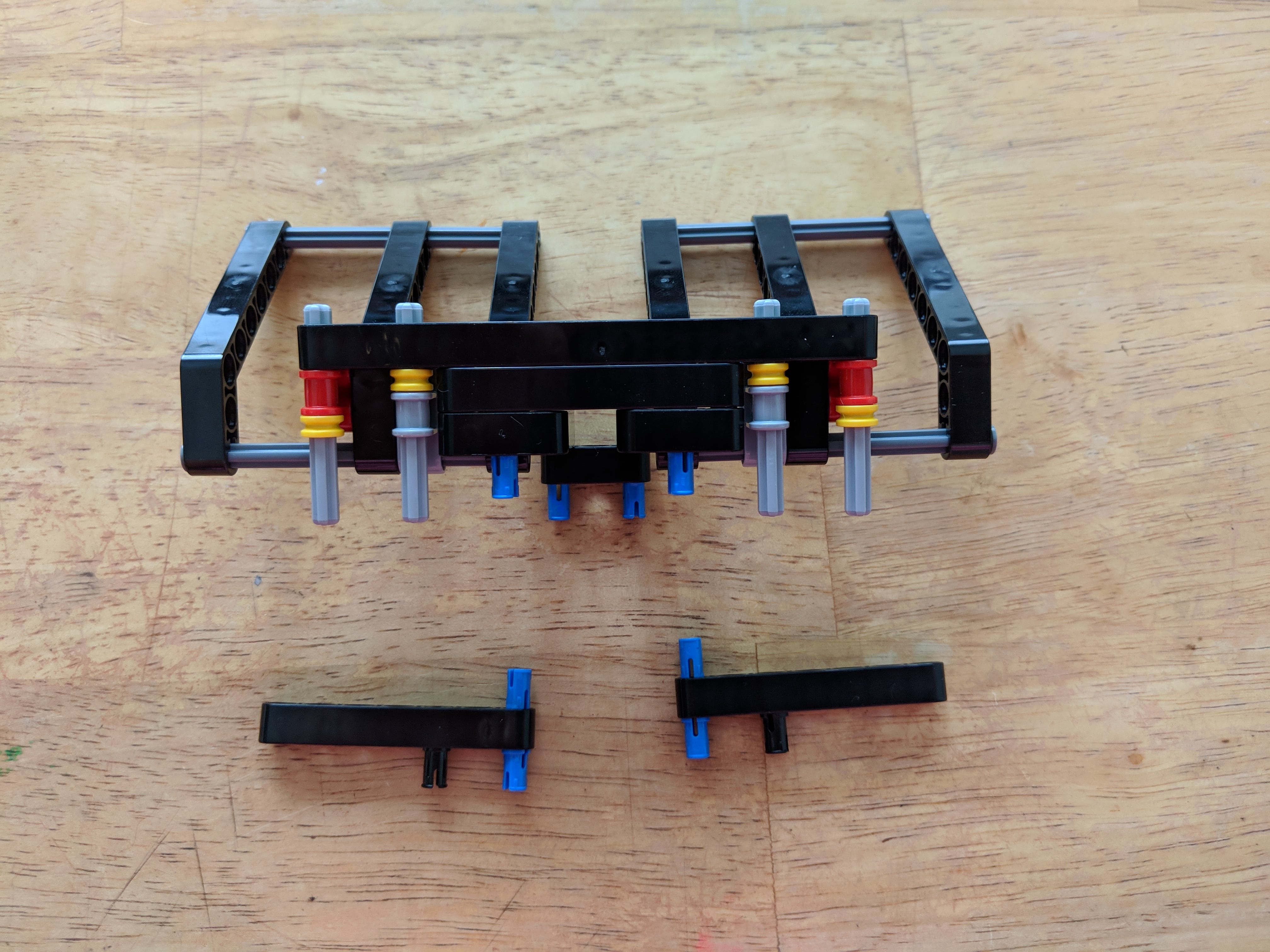
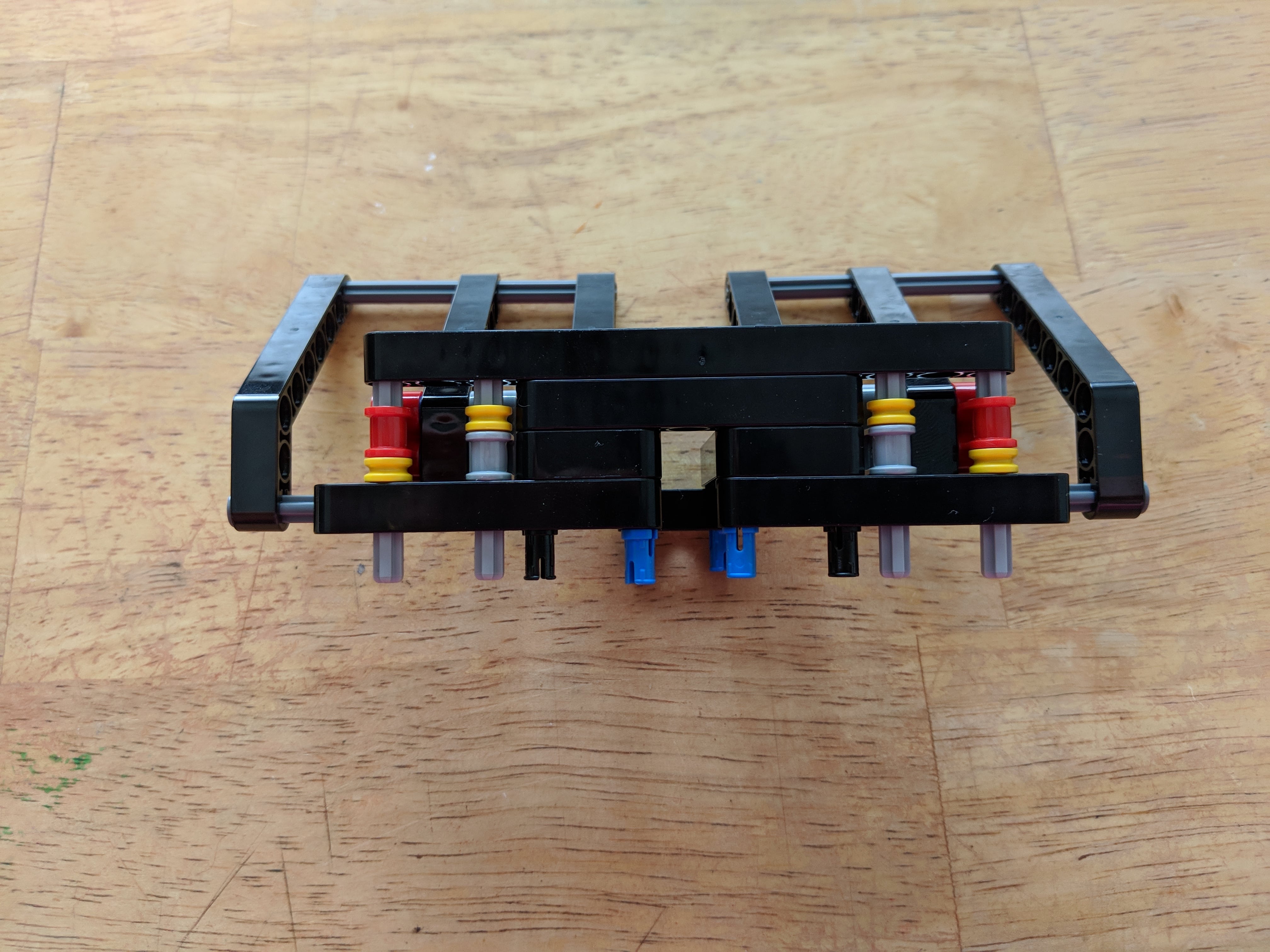
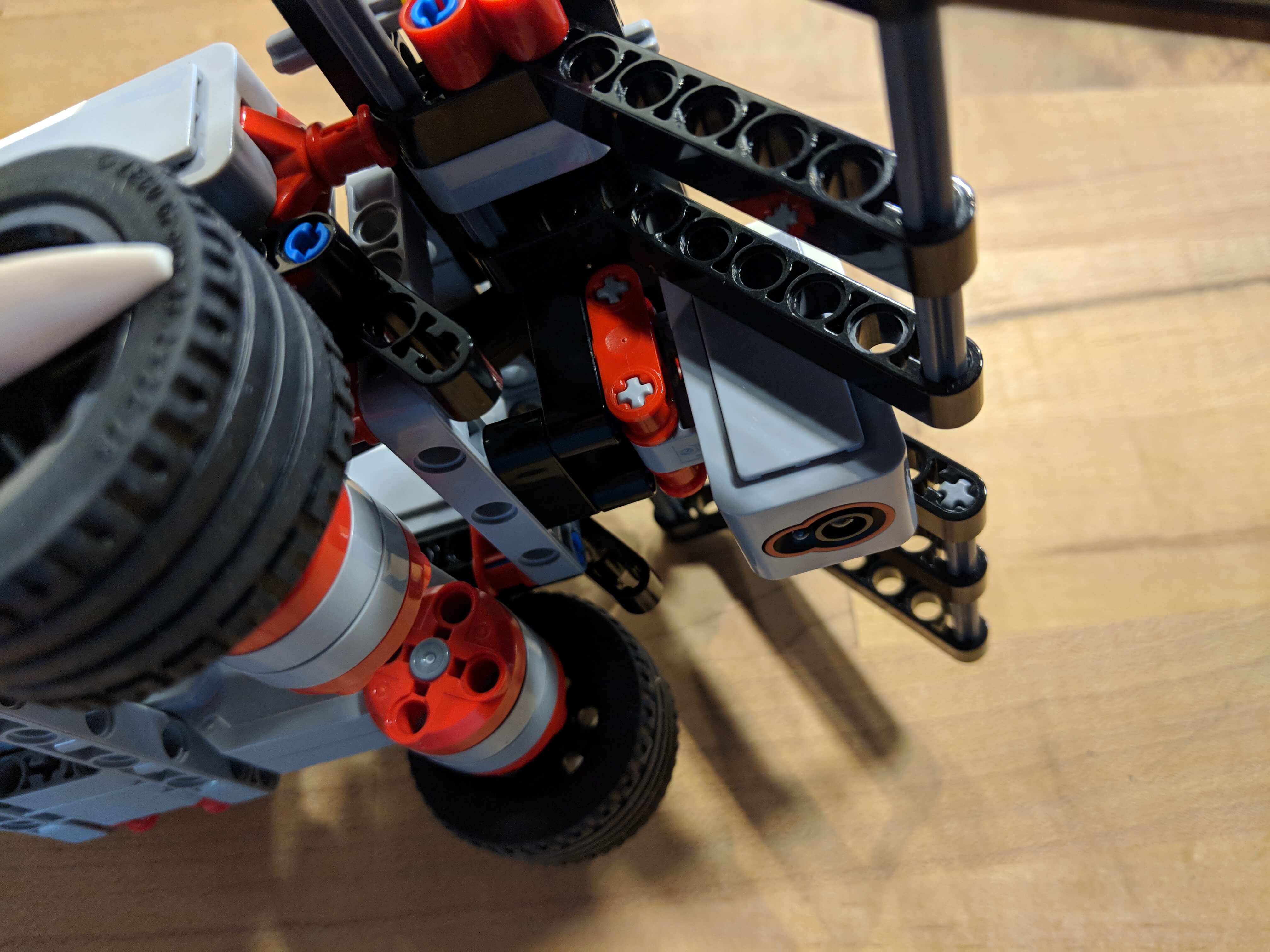
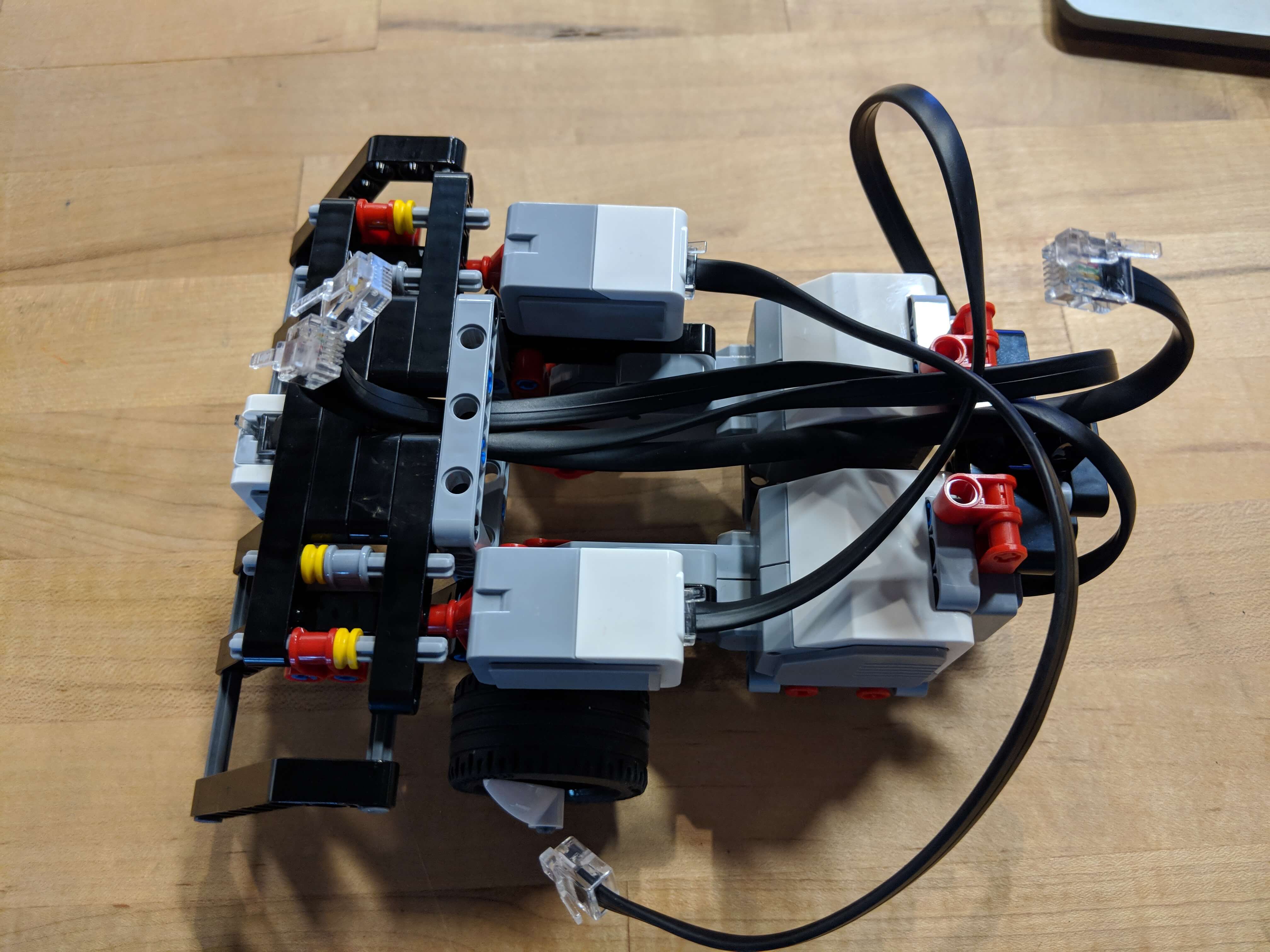
Complete Assembly
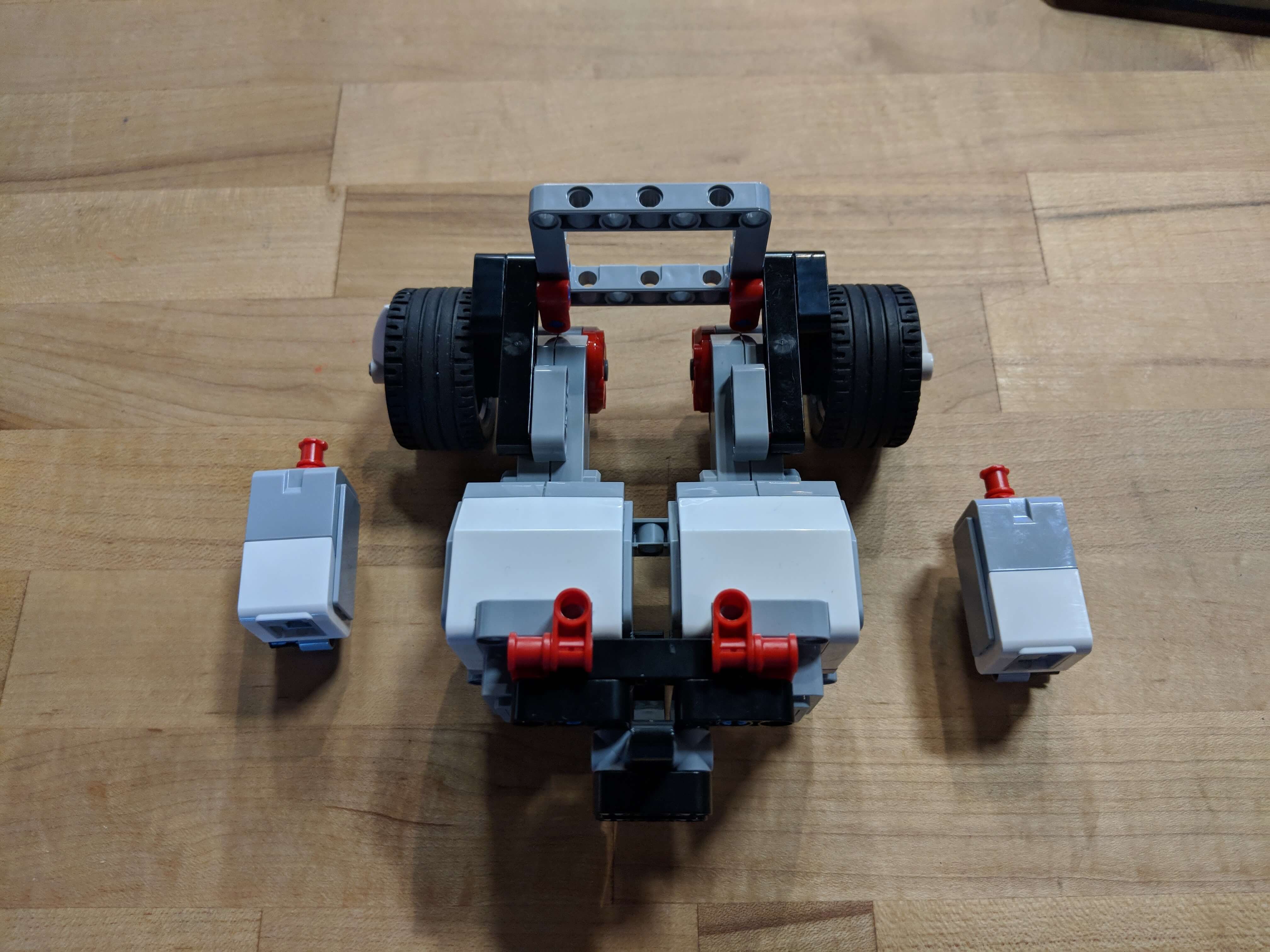
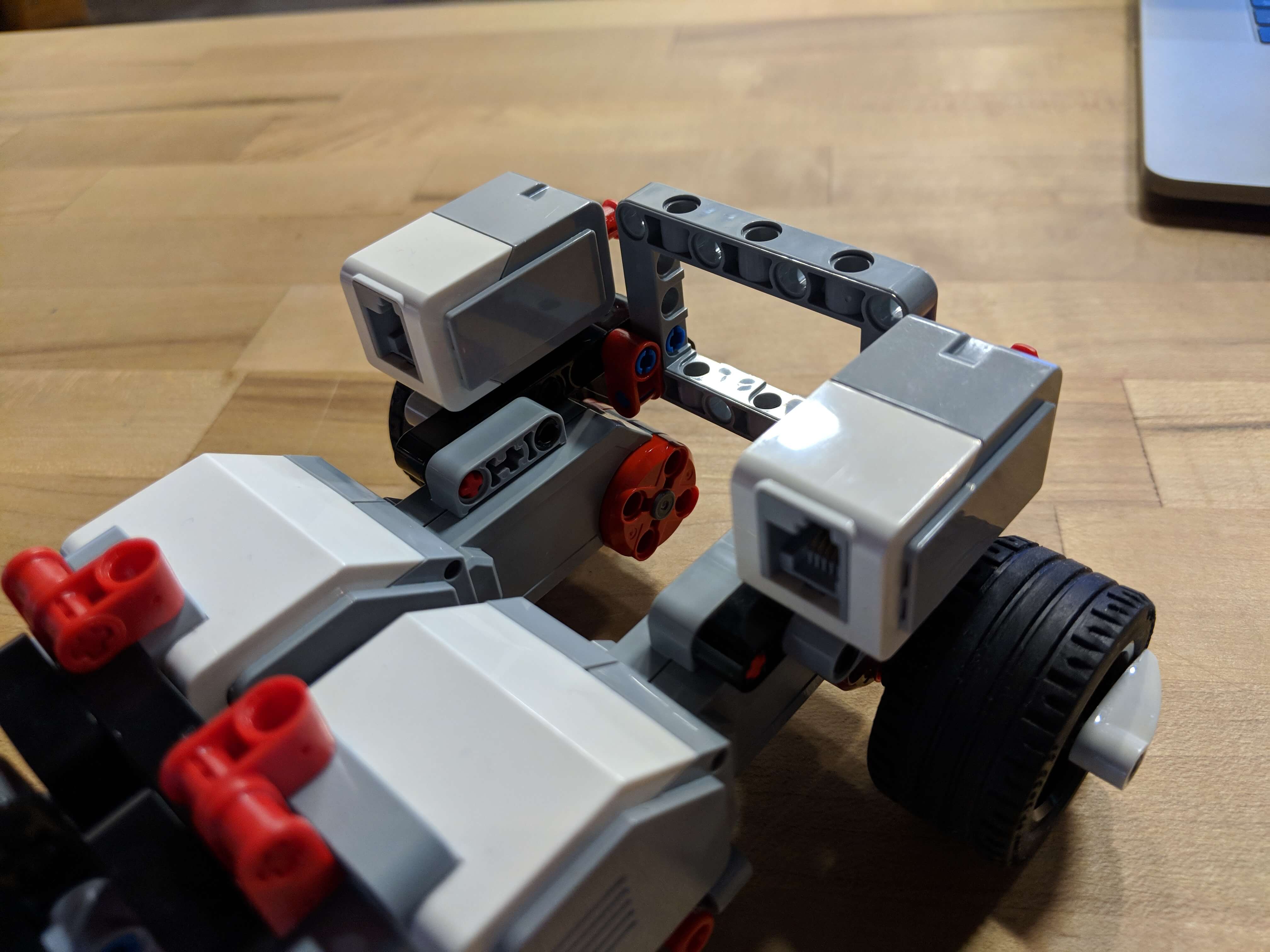
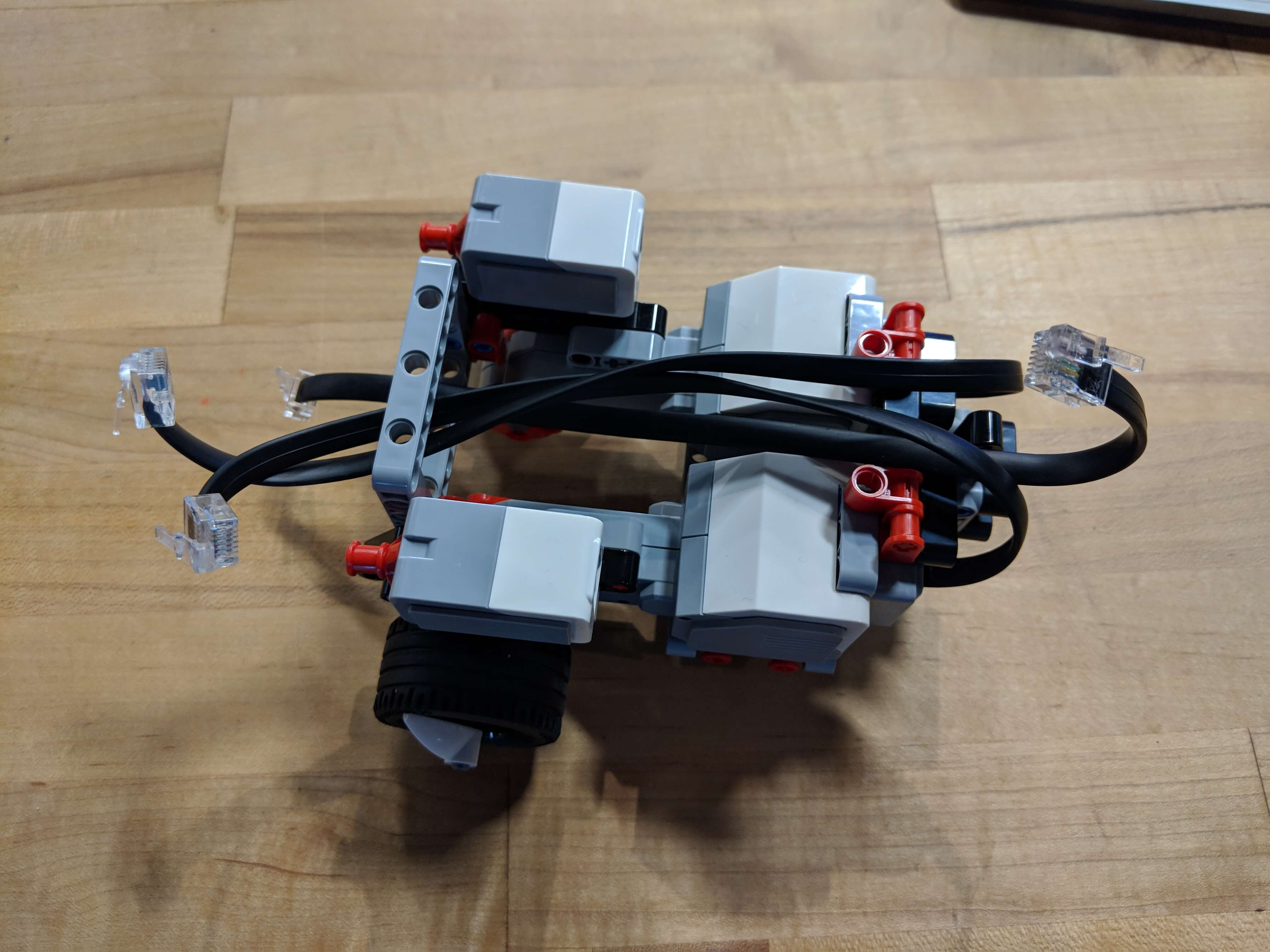
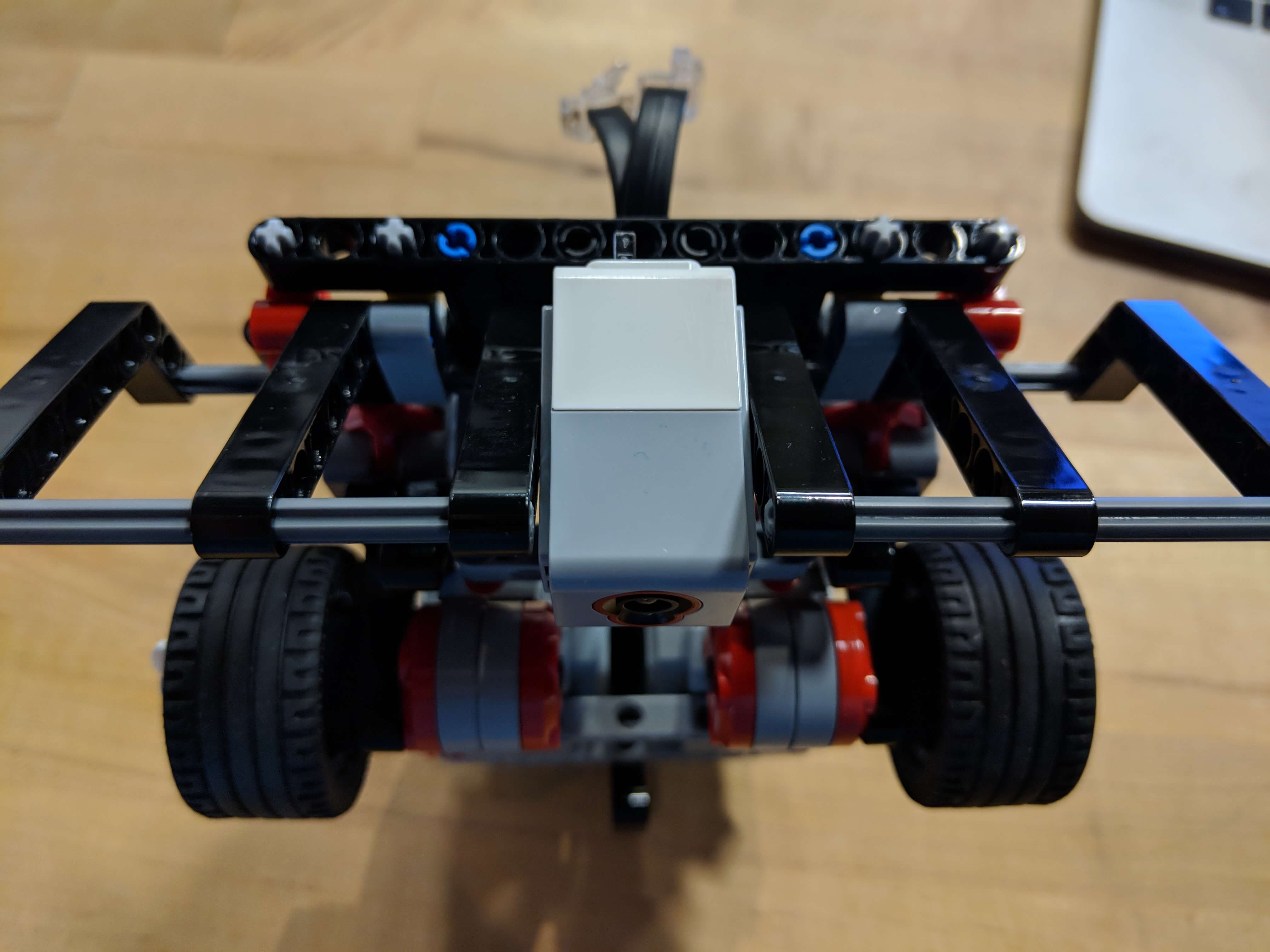


Connect the left touch sensor to port 1 and the right touch sensor to port 2.
Note that the wires cross underneath the EV3 brick.
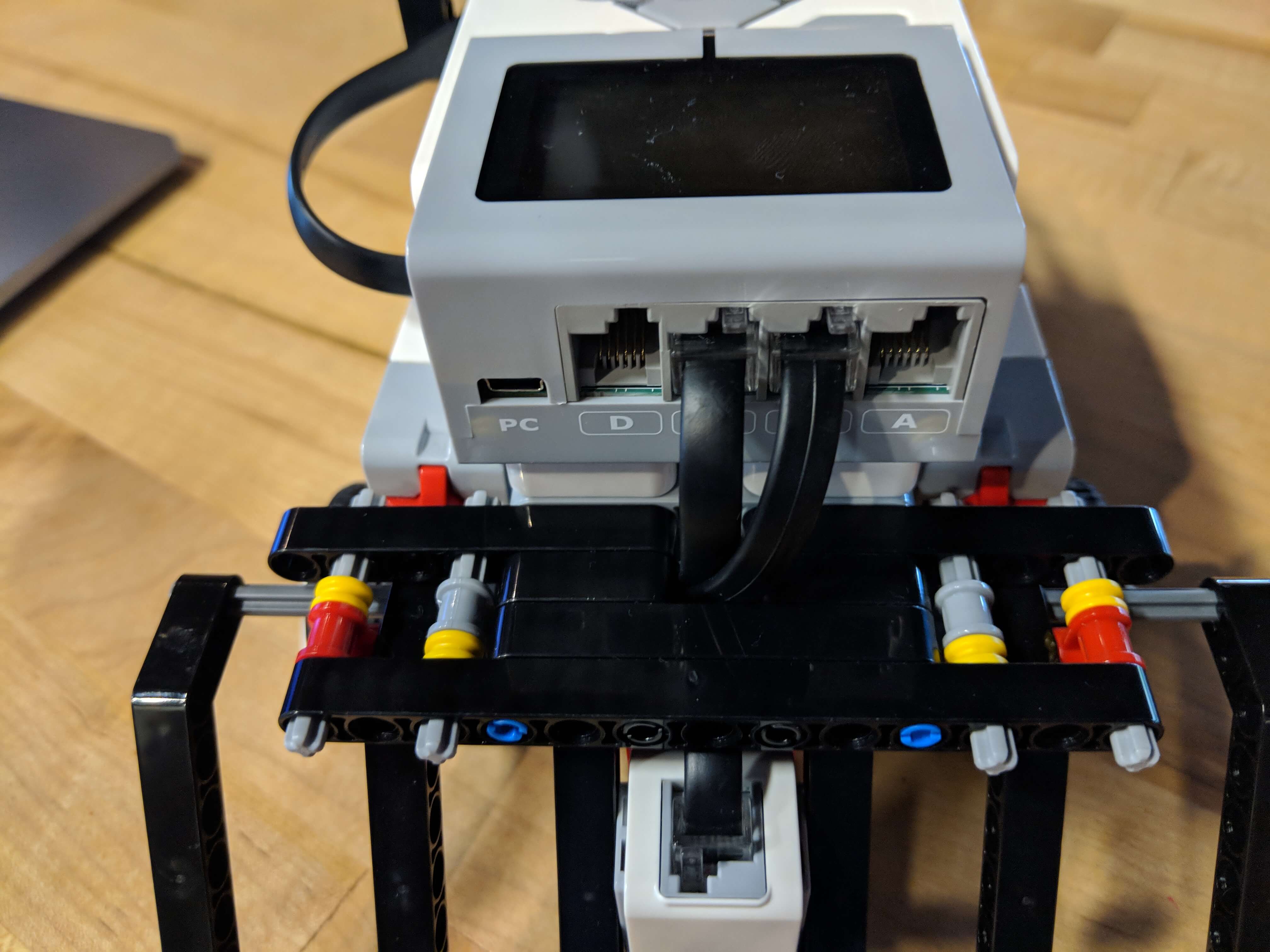
Connect the left motor to port C and the right motor to port B.
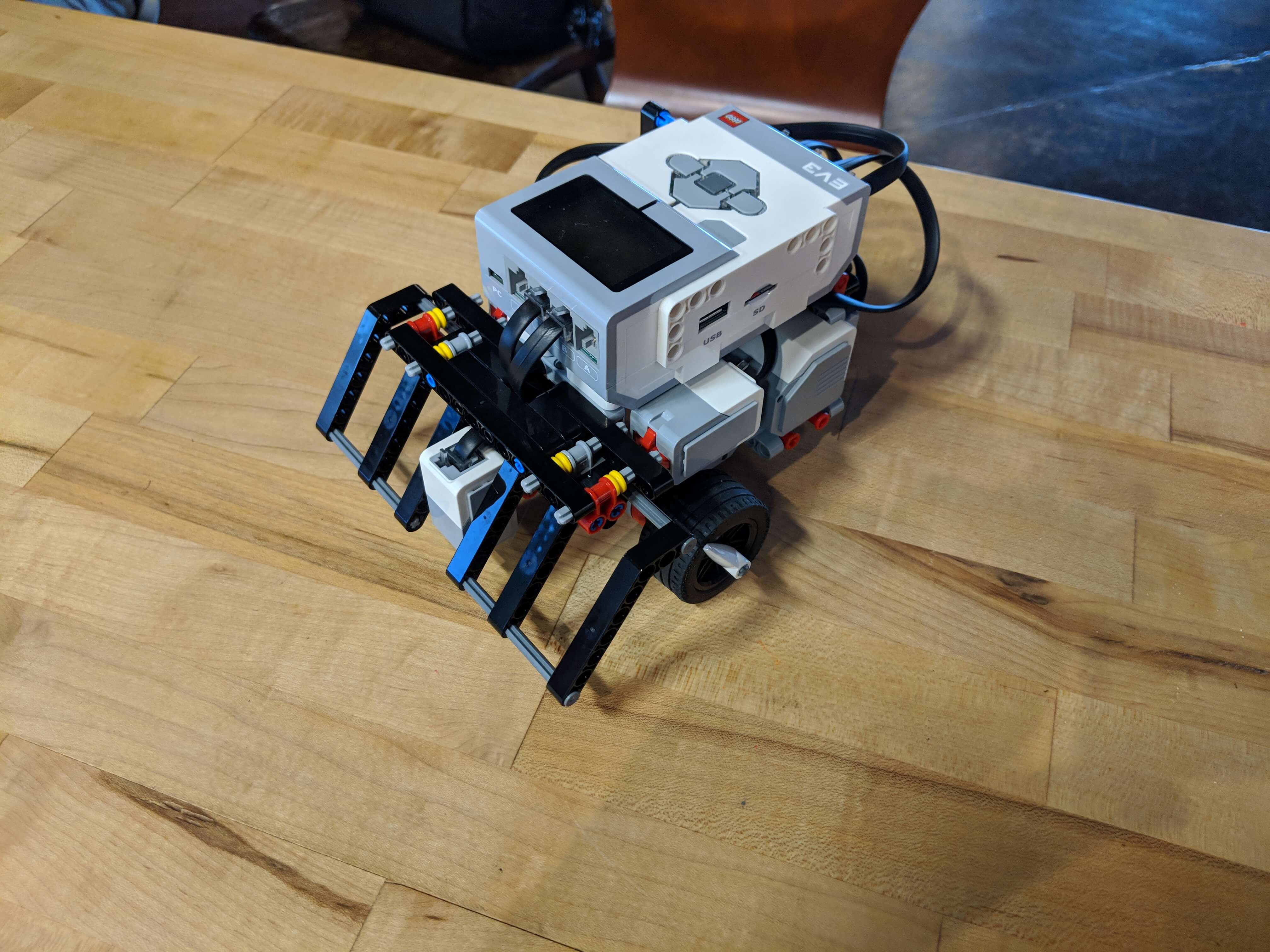
Congratulations
You have completed your EV3 sumo robot.
Рекомендации по сборке и программированию Lego робота-сумоиста EV3
Рекомендации по сборке и программированию Lego робота-сумоиста EV3
Для победы в боевых соревнованиях по робототехнике необходимо правильно собрать робота сумо ev3, инструкция по сборке поможет в этом. Результативность обеспечивается задействованием всех функциональных возможностей, включая датчики расстояния, цвета, толкающие и поддевающие ковши. Роботы-участники представлены в базовых и усовершенствованных комплектациях (шагающие, гусеничные боты).

Необходимые детали для робота-сумо ev3
Модели для сумо состоят из следующих блоков и элементов:
- 3 большие шестеренки, скрепленные парой балок для полного привода;
- колеса;
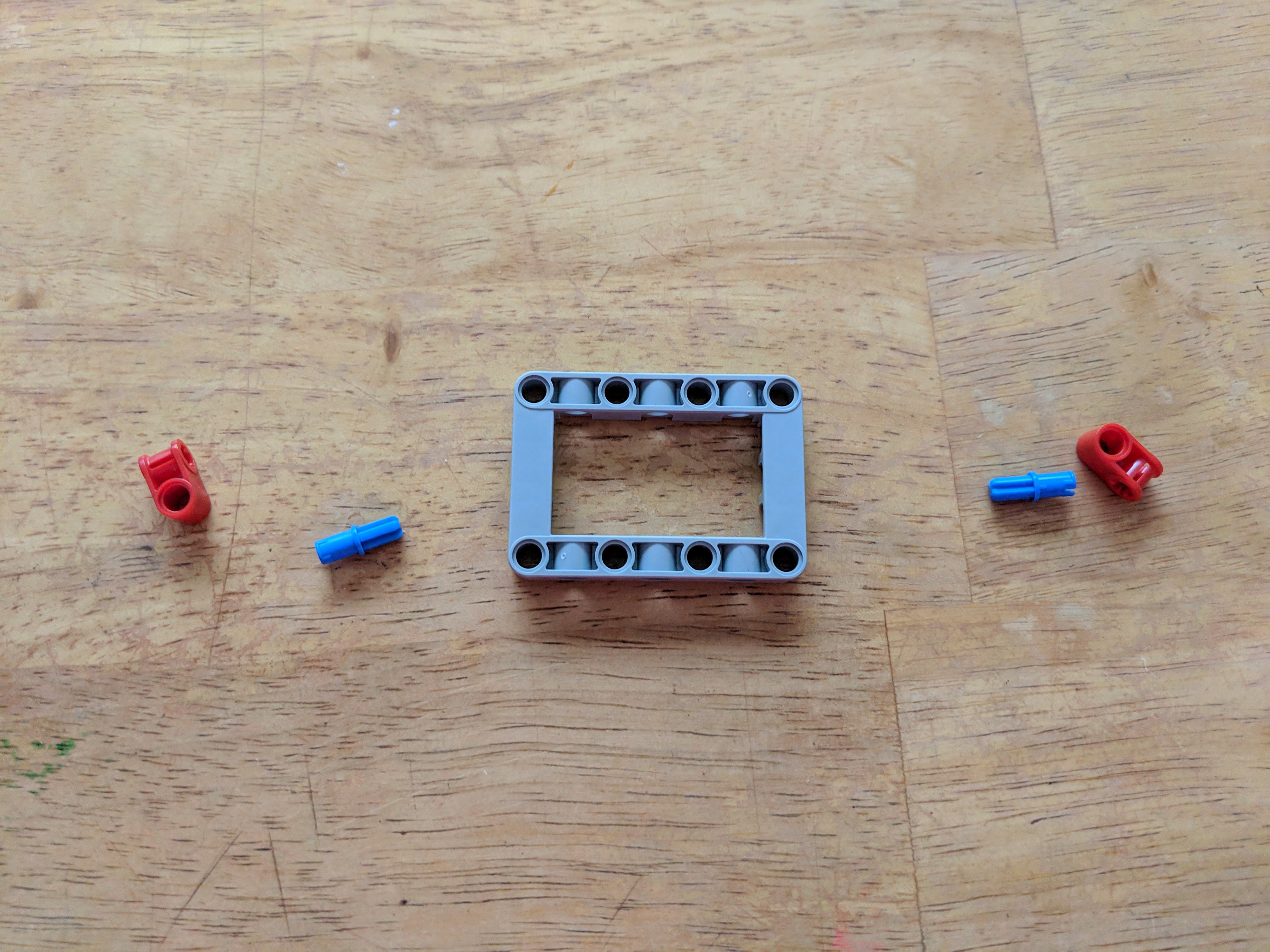
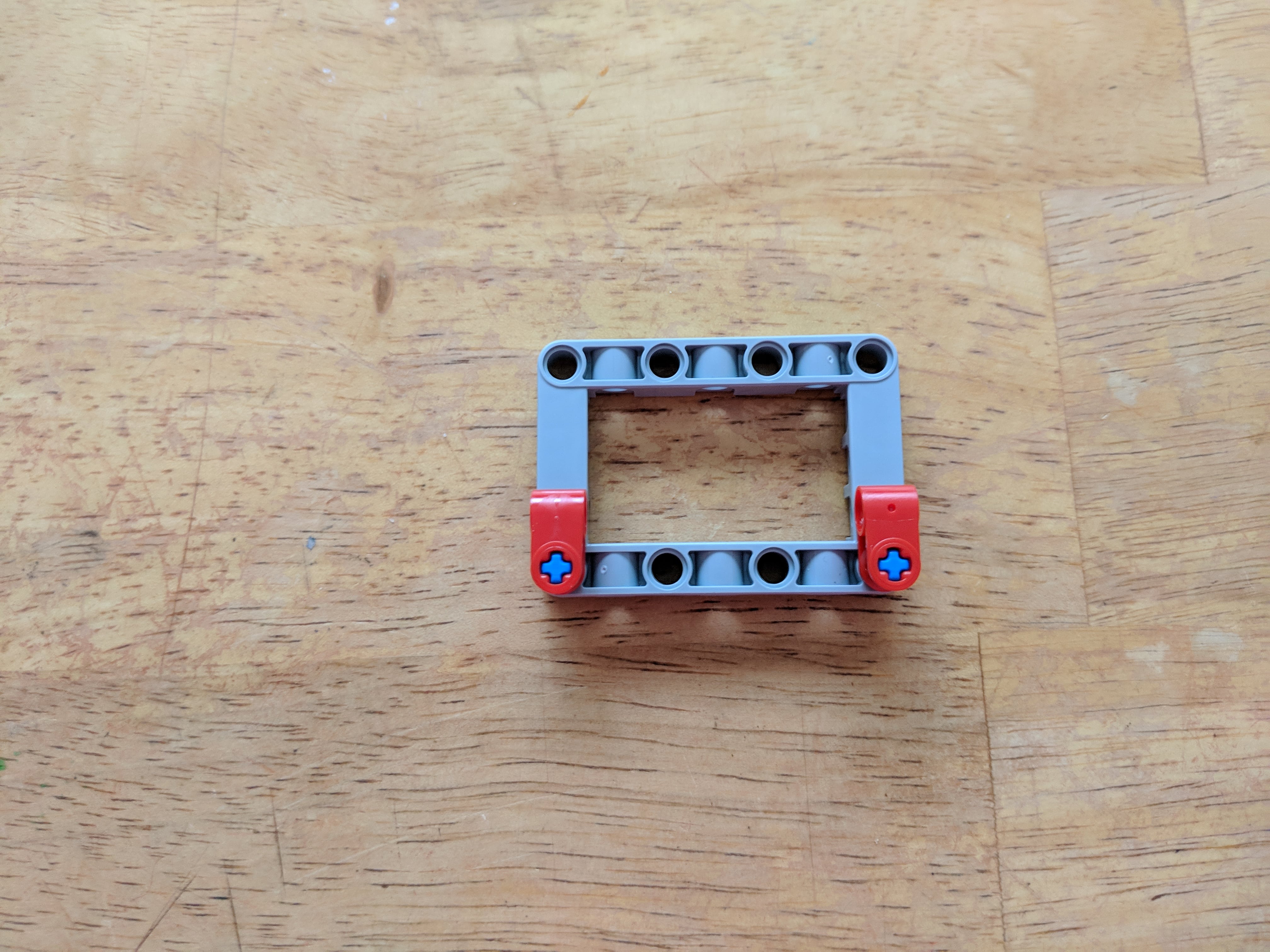
- прямоугольная рамка для размещения боковой платформы;
- поддевающий и распорный ковши;
- моторы;
- датчики и портальные разъемы;
- конструкционные элементы (поперечины, крепеж, направляющие, продольные, диагональные рейки).
Датчики и моторы
Для робота предусмотрено два больших двигателя, подсоединяемые к портам «В» и «С». Движущая конструкция расположена во фронтальной части, моторы вращаются по часовой стрелке.
Полноценное функционирование ev3 невозможно без датчиков. У рассматриваемого конструктора применяется пять основных видов индикаторов:
- Инфракрасный маяк служит для передачи сигналов роботу. Он агрегирует с другими лего-ботами.
- Температурный датчик работает по принципу органов чувств человека и других живых организмов.
- Ультразвуковой индикатор реагирует на соперника, что важно на соревнованиях любого уровня.
- Индикатор цвета расширяет возможности робота, ориентируя его на ринге.
- Датчик касания — самый простой и важный элемент.

Программный блок
Стандартное ПО рассчитано на два больших мотора, два датчика (инфракрасный и цветовой). Работает программа по следующей схеме:
- «Ожидание» – 5 секунд.
- «Звуковой сигнал» – начало работы.
- Два цикла «Начало» и «Неограниченный» – старт движения.
- «Определение цвета» – по умолчанию робот видит черный колер; при этом механизм отъезжает на два вращения назад.
- «Управление рулевое» – корректируется количество оборотов.
- Режим «Нет цвета» – ведется расчет имеющихся препятствий, расстояния до них и последующих манипуляций.
- «Инфракрасный индикатор» – действует по принципу распознавания и приближения объектов.
- «Истина» – ветка, которая активируется, если до препятствия менее 60 единиц.
- «Лож» – противоположность восьмой позиции в списке.
- «Независимое управление» – на противоположных мощностях двигателей бот будет вертеться на месте, пока дистанция до соперника не станет менее 60 единиц.
Выставив указанные параметры, проводят тестирование робота ev3 для сумо.
Моторы большой и средний
Основной двигатель серверного типа сделан под NXT с увеличенной корпусной частью. Характеристики:
- оборотистость предельная (об./мин.) — 170;
- заданный/рабочий момент кручения (Н/см) — 40/20;
- индикатор поворотного угла – есть, погрешность – до одного градуса.
Средний сервомотор «ев3» базируется на Power Function, ориентирован на высокие скорости и низкие нагрузки. Параметры:
- максимум оборотов (об./мин.) — 250;
- крутящий момент (Н/см) — 12/8;
- энкодер, отвечающий за угол поворота с точностью до одного градуса.
Новый блок для соревнований настроен универсально, подходит для всех модификаций рассматриваемых конструкций.

Удаленный инфракрасный маяк
Впереди расположенный датчик излучает волны, невидимые человеческому глазу. Подобным образом работают ДПУ. В режиме «Приближение» индикатор самостоятельно отправляет импульсы, отражая полученный сигнал и фиксируя обнаруженное препятствие.
ИК-маяк может определять дистанцию до соперника, посылая сведения о примерном своем расположении и удаленности. Для использования функции потребуются батарейки типа «ААА».
Датчик цвета и прикосновения
Цветовой индикатор «сумоиста» отличает семь оттенков с возможностью определения отсутствия колера. Дополнительная функция – работа в режиме подсветки.
- улавливание красного и его окружающего фона;
- контроль разницы между контрастными оттенками;
- рабочая частота – 1 кГц.
Датчик касания фиксирует активацию или отпускание кнопки, подсчитывает число нажатий.
Инфракрасный сенсор
Этот индикатор позволяет определять не только оттенок, но и степень освещенности, дистанцию до ближайших предметов. В качестве контроллера выступает специальный блок, к которому подсоединяются сопутствующие «движки» и датчики.

Группа студентов в лаборатории интеллектуальных систем (Nagai Lab) в Университете «University of Electro-Communications (UEC)» разрабатывают робота которого назвали DiGORO. Уникальность этого робота в том что он может обучаться. В частности робот умеет визуально запоминать.

January 11, 2010
by koka · Published January 11, 2010 · Last modified June 28, 2014
Оценка статьи:

Загрузка…
Содержание
- 1 Необходимые детали для робота-сумо ev3
- 2 Пошаговая инструкция по сборке
- 3 Коротко о программировании сумо-робота
Для победы в боевых соревнованиях по робототехнике необходимо правильно собрать робота сумо ev3, инструкция по сборке поможет в этом. Результативность обеспечивается задействованием всех функциональных возможностей, включая датчики расстояния, цвета, толкающие и поддевающие ковши. Роботы-участники представлены в базовых и усовершенствованных комплектациях (шагающие, гусеничные боты).
Необходимые детали для робота-сумо ev3
Модели для сумо состоят из следующих блоков и элементов:
- 3 большие шестеренки, скрепленные парой балок для полного привода;
- колеса;
- прямоугольная рамка для размещения боковой платформы;
- поддевающий и распорный ковши;
- моторы;
- датчики и портальные разъемы;
- конструкционные элементы (поперечины, крепеж, направляющие, продольные, диагональные рейки).
Датчики и моторы
Для робота предусмотрено два больших двигателя, подсоединяемые к портам «В» и «С». Движущая конструкция расположена во фронтальной части, моторы вращаются по часовой стрелке.
Полноценное функционирование ev3 невозможно без датчиков. У рассматриваемого конструктора применяется пять основных видов индикаторов:
- Инфракрасный маяк служит для передачи сигналов роботу. Он агрегирует с другими лего-ботами.
- Температурный датчик работает по принципу органов чувств человека и других живых организмов.
- Ультразвуковой индикатор реагирует на соперника, что важно на соревнованиях любого уровня.
- Индикатор цвета расширяет возможности робота, ориентируя его на ринге.
- Датчик касания — самый простой и важный элемент.
Одно состязание робо-сумо состоит из 3-х раундов, общая продолжительность которых составляет 3 минуты.
Программный блок
Стандартное ПО рассчитано на два больших мотора, два датчика (инфракрасный и цветовой). Работает программа по следующей схеме:
- «Ожидание» – 5 секунд.
- «Звуковой сигнал» – начало работы.
- Два цикла «Начало» и «Неограниченный» – старт движения.
- «Определение цвета» – по умолчанию робот видит черный колер; при этом механизм отъезжает на два вращения назад.
- «Управление рулевое» – корректируется количество оборотов.
- Режим «Нет цвета» – ведется расчет имеющихся препятствий, расстояния до них и последующих манипуляций.
- «Инфракрасный индикатор» – действует по принципу распознавания и приближения объектов.
- «Истина» – ветка, которая активируется, если до препятствия менее 60 единиц.
- «Лож» – противоположность восьмой позиции в списке.
- «Независимое управление» – на противоположных мощностях двигателей бот будет вертеться на месте, пока дистанция до соперника не станет менее 60 единиц.
Выставив указанные параметры, проводят тестирование робота ev3 для сумо.
Моторы большой и средний
Основной двигатель серверного типа сделан под NXT с увеличенной корпусной частью. Характеристики:
- оборотистость предельная (об./мин.) — 170;
- заданный/рабочий момент кручения (Н/см) — 40/20;
- индикатор поворотного угла – есть, погрешность – до одного градуса.
Средний сервомотор «ев3» базируется на Power Function, ориентирован на высокие скорости и низкие нагрузки. Параметры:
- максимум оборотов (об./мин.) — 250;
- крутящий момент (Н/см) — 12/8;
- энкодер, отвечающий за угол поворота с точностью до одного градуса.
Новый блок для соревнований настроен универсально, подходит для всех модификаций рассматриваемых конструкций.
Роботы, участвующие в соревнованиях, должны быть автономными и быть собраны только из деталей Lego.
Удаленный инфракрасный маяк
Впереди расположенный датчик излучает волны, невидимые человеческому глазу. Подобным образом работают ДПУ. В режиме «Приближение» индикатор самостоятельно отправляет импульсы, отражая полученный сигнал и фиксируя обнаруженное препятствие.
ИК-маяк может определять дистанцию до соперника, посылая сведения о примерном своем расположении и удаленности. Для использования функции потребуются батарейки типа «ААА».
Датчик цвета и прикосновения
Цветовой индикатор «сумоиста» отличает семь оттенков с возможностью определения отсутствия колера. Дополнительная функция – работа в режиме подсветки.
Опции:
- улавливание красного и его окружающего фона;
- контроль разницы между контрастными оттенками;
- рабочая частота – 1 кГц.
Датчик касания фиксирует активацию или отпускание кнопки, подсчитывает число нажатий.
Инфракрасный сенсор
Этот индикатор позволяет определять не только оттенок, но и степень освещенности, дистанцию до ближайших предметов. В качестве контроллера выступает специальный блок, к которому подсоединяются сопутствующие «движки» и датчики.
Роботы-сумоисты могут иметь различную конфигурацию, однако, они должны соответствовать регламенту соревнований — находиться в пределах назначенного размера и веса.
Пошаговая инструкция по сборке
Собрать мощного робота-сумоиста Lego не сложно, если знать все операции по этапам.
Боевой бот Mindstorms ev3 конструируется следующим образом:
- Собирается передний привод с тремя большими шестернями и обжимной парой длинных балок.
- Крепятся колеса, горизонтальная и вертикальная прямоугольная рамка.
- Цепляется поддевающий ковш.
- Комплектуется вся правая сторона боевого робота для сумо.
- Подсоединяются датчики к моторам посредством проводов и специальных портальных гнезд.
Бота собирают в нескольких базовых исполнениях. Таблица ориентирует пользователей на выбор модели, подходящей для заданных целей, по сравнению с категорией Education.
| Характеристика | NXT | EV3 |
| Основной процессор | ARM AT91-SAM 7S256, Atmel. 48 МГц, «Флеш-память» – 256 кБ, RAM – 64 кБ | ARM9, 300 МГц, Память – 16/64 кБ |
| Вспомогательное ПО | «Восьмибитный» «Амтел», 8 МГц, «Флеш»/«РАМ» – 4,0/0,52 кБ | Не предусмотрено |
| Операционная система | Propietary | Linux |
| Ввод | Четыре гнезда с цифровыми и аналоговыми портами. Скорость – 9600 бит/с | Аналоговые и цифровые разъемы со скоростью 460,8 Кбит/с |
| Вывод | 3 | 4 |
| Передача сведений | Full speed 12 Мбит/с | High speed 480 Мбит/с |
| Способ подключения | Отсутствует | Wi-Fi, Flash (до трех носителей и передатчиков) |
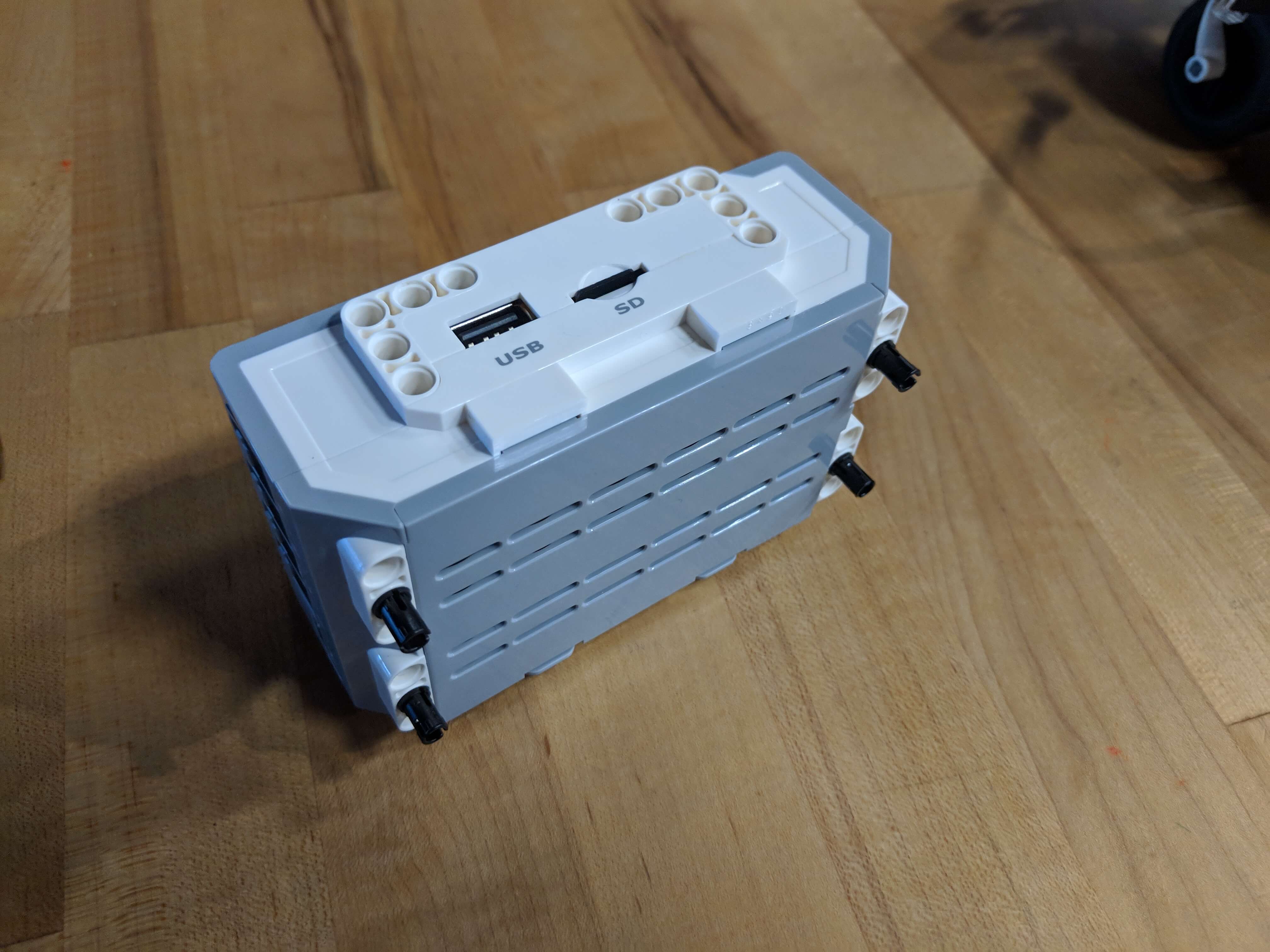
| Чтение карт SD | Нет | miniSD до 32 Гб |
| Совместимость с мобильными девайсами | «Андроид» | «Андроид», iOS |
| Монитор | Монохромный LCD (100×64 Px) | LCD (178×128 Px) |
| Взаимодействие | Bluetooth, USB | Bluetooth 2.1, USB 2.0/1.1, Wi-Fi |
Коротко о программировании сумо-робота
Регламент состязаний предполагает расположение «бойцов» во внутреннем секторе круга. Диаметр арены составляет 1540 мм, черная приграничная окантовка имеет ширину 50 мм. В середине круга предусмотрены две стартовые линии. На них соревнующиеся машины должны выждать 5 секунд до того, как броситься в схватку. В связи с этим секундомер пуска настраивается с соответствующей задержкой.
«Фишка» подобных соревнований заключается в том, что программировать робота «на успех» не получится. Направление движения определяет судья. Во избежание попадания бота в «молоко» используется программа «Цикл» с независимым управлением.
Настройка предполагает создание для мотора «А» предельной скорости перемещения вперед. Соответственно, мотор «В» на гусеницах альтернативно вращается назад. Независимое управление позволяет вращаться конструкции в пределах одной оси.
Пользователь корректирует робота, вращая его на одной точке. В этом помогает инфракрасный датчик, определяющий цель. Используют опцию «Приближение», настроив дистанцию 0,5 м. Рабочий диаметр для сражения ботов составляет по диагонали 1,5 м.
В соответствии с правилами предельное расстояние между соперниками не превышает 1000 мм. Колесо каждого участника не должно заступать за стартовую линию. Уловив цель, индикатор передает сведения на микропроцессор. Включается независимое управление, робот начинает перемещаться вперед и в стороны.
Для того чтобы лего-боец сумо смог уловить направление движения и стратегию ведения борьбы, включается датчик цвета. С его помощью бот доходит до черной черты с последующим включением задней передачи. Если на протяжении одной секунды ситуация остается без изменений, «сумоист» останавливается автоматически.
После настройки всех портов с моторами и датчиками, программа представит собой схему, в которой задействованы два двигателя, индикаторы света и инфракрасного излучения на движение.
Скачать материал
без ожидания

Скачать материал
без ожидания


- Сейчас обучается 24 человека из 16 регионов


- Сейчас обучается 1011 человек из 79 регионов


- Сейчас обучается 241 человек из 54 регионов


Описание презентации по отдельным слайдам:
-

1 слайд
РОБОТ ДЛЯ
СОРЕВНОВАНИЙ СУМОРуководитель: педагог доп. образования МБОУ ДОД «СЮТ»
Калинина Ольга Анатольевна -
2 слайд
Объектная область
РОБОТОТЕХНИКА — прикладная наука, занимающаяся разработкой роботов.
РОБОТ — аппарат, способный самостоятельно взаимодействовать с внешним миром и обладающий искусственным интеллектом. -
3 слайд
Объектная область
Действуя по заранее заложенной в микрокомпьютер программе и получая информацию о внешнем мире от датчиков,
робот с помощью сервопривода
самостоятельно осуществляет различные операции,
заменяя человека или животного. -
4 слайд
Объектная область
Мы изучаем робототехнику на дополнительных занятиях, собираем модели из конструктора
LEGO NXT MINDSTORMS и программируем в специальной программной среде,
разработанной для школьников. -
5 слайд
Объект исследования — соревнования роботов
Существует несколько видов классических соревнований роботов:
гонки по линии и скоростные,
перетягивание каната,
кегельринг.
Мы решили провести городские соревнования роботов СУМО, для участия в которых необходимо было
создать своих роботов. -
6 слайд
Предмет исследования
Инструкция по сборке роботов СУМО, а также придуманная и запрограммированная модель.
Типовое положение о проведении соревнований роботов СУМО. -
7 слайд
Проблемный вопрос
В ходе обсуждения предмета и объекта исследования перед нами встал вопрос –
как создать робота, который соответствовал бы условиям, заявленным в положении и правилах соревнований СУМО.
Какие же роботы становятся победителями? -
8 слайд
Цель
Создание конкурентноспособного робота, соответствующего стандарту заявленной категории СУМО,
разработка положения о проведении городских соревнований роботов СУМО. -
9 слайд
Задачи
Проанализировать типовое положение о проведении соревнований СУМО и на его основе написать положение для городских соревнований.
Собрать робота СУМО из конструктора LEGO EDUCATION EV3 по инструкции.
Сравнить различные конструкции роботов СУМО, разработать собственную, используя полученные знания.
Создать программу для робота.
Провести городские соревнования. -
10 слайд
Положение о проведении соревнований лего-роботов «СУМО»
I. Участники соревнований
1. Команда – группа учащихся (2 человека) во главе с тренером, занимающихся робототехникой в образовательном учреждении. Количество команд не ограничено.
2. Каждый участник может быть членом только одной команды.
3. Каждая команда должна иметь название.II. Правила проведения соревнований
1. К участию в состязаниях допускаются команды, чьи роботы построены с использованием конструкторов LEGO NXT MINDSTORMS и ресурсного набора, а также LEGO EDUCATION EV3 и ресурсного набора к нему, допускается использовать дополнительные датчики ЛЕГО.
2. Попыткой называются определенные правилами действия робота одной команды, продолжительность которых определяется либо временем, либо выбыванием соперников. Раунд — сумма попыток всех команд, проведенных на одних и тех же конкретных игровых полях и по одинаковым правилам, которые организованы так, чтобы обеспечить равные, справедливые и конкурентные шансы для всех роботов, принявших участие в соревнованиях.
3. Оператором называется член команды, которому поручено включать и останавливать робота во время попытки. Во время попытки только оператору соревнующейся команды разрешено находиться на территории возле игрового поля. -
11 слайд
III. Порядок проведения соревнований
1. Команды должны поместить робота в инспекционную область перед началом соревнования. После подтверждения судьи соответствия роботов требованиям Положения, соревнования могут быть начаты.
2. Если при осмотре будет найдено нарушение в конструкции робота, то судья даст 3 минуты на устранение нарушения. Однако если нарушение не будет устранено в течение этого времени, команда не сможет участвовать в состязании.IV. Судейство
1. Контроль и подведение итогов осуществляется судейской коллегией в соответствии с приведенными правилами.
2. Судьи обладают всеми полномочиями на протяжении всех состязаний; все участники должны подчиняться их решениям.
3. Переигровка может быть проведена по решению судей в случае, когда робот не смог закончить этап из-за постороннего вмешательства, либо когда неисправность возникла по причине плохого состояния игрового поля.
4. Члены команды и руководитель не должны вмешиваться в действия робота своей команды или робота соперника ни физически, ни на расстоянии. Вмешательство ведет к немедленной дисквалификации.
5. Организаторы оставляют за собой право вносить в правила состязаний любые изменения. -
12 слайд
V. Условия состязания
1. В день соревнований команда представляет готового лего-робота с загруженной программой.
2. Робот должен вытолкнуть робота-противника за черную линию (столкнуть с поля).
3. После команды рефери «Марш» операторы нажимают кнопку Run роботов (или другую), после чего роботы атакуют соперника. Операторы отходят от края поля на 1 метр.
4. Во время проведения попытки операторы команд не должны касаться роботов.VI. Требования к роботу
1. Максимальная ширина робота 250 мм, длина 250 мм, высота 250 мм. Масса робота – не более 1 кг. Во время попытки робот не может менять свои размеры.
2. В конструкции робота можно использовать только один микрокомпьютер NXT или EV3 и 2 мотора.
3. В конструкции роботов нельзя использовать винты, клеи, веревки или резинки для закрепления деталей между собой.
4. Робот, не соответствующий требованиям, не будет допущен к участию в соревнованиях, либо результат робота будет аннулирован.VI. Правила отбора победителей
Робот считается проигравшим, если его вытолкнули за черную линию поля. -
13 слайд
Гипотеза
Вероятно, конструкция должна быть прочной.
Золотое правило механики утверждает, что, проигрывая в скорости, мы тем самым выигрываем в силе.
Предположим, что, используя понижающую передачу, мы добьемся увеличения мощности.
Возможно, к увеличению мощности и трению колес о поверхность приводит увеличение массы робота. -
14 слайд
Методы исследования и план работы
Посмотреть в сети Интернет соревнования роботов СУМО, найти сайты с инструкциями. Посоветоваться с педагогом.
Спросить у родителей.
Собрать различные
модели.
Провести эксперимент
с различными моделями,
чтобы выбрать лучшую. -
15 слайд
Эксперименты, опыты, наблюдения
в ходе исследованияВ сети Интернет мы нашли видеоролики с соревнований, где участвуют роботы СУМО. Посмотрели сайт с инструкцией по созданию робота. Все роботы получились одинаковыми.
Мы выдвинули гипотезу, как увеличить мощность робота.
Применили золотое правило механики. -
16 слайд
ВЫВОДЫ
Проведя исследование, мы доказали, что конструкция должна быть прочной.
К увеличению мощности и трения колес о поверхность приводит увеличение массы робота.
Используя понижающую передачу, мы добились увеличения мощности.
Наша гипотеза подтвердилась. -
17 слайд
Интернет-ресурсы:
http://ru.wikipedia.org/wiki/%D0%EE%E1%EE%F2
http://traditio-ru.org/wiki/%D0%A0%D0%BE%D0%B1%D0%BE%D1%82
http:// http://robotsspace.ucoz.ru/forum/9-8-1
http://www.robotclub.ru/robot228.php
www.nxtprograms.com
http://www.prorobot.ru/
















Найдите материал к любому уроку, указав свой предмет (категорию), класс, учебник и тему:
6 257 925 материалов в базе
- Выберите категорию:
- Выберите учебник и тему
- Выберите класс:
-
Тип материала:
-
Все материалы
-
Статьи
-
Научные работы
-
Видеоуроки
-
Презентации
-
Конспекты
-
Тесты
-
Рабочие программы
-
Другие методич. материалы
-
Найти материалы
Другие материалы
- 22.11.2022
- 58
- 1
- 22.11.2022
- 136
- 1
- 22.11.2022
- 219
- 2
- 22.11.2022
- 80
- 1
- 22.11.2022
- 76
- 1
- 22.11.2022
- 174
- 3
- 22.11.2022
- 42
- 0
- 22.11.2022
- 72
- 0
Вам будут интересны эти курсы:
-
Курс повышения квалификации «Организация деятельности специалистов по ВЭД»
-
Курс профессиональной переподготовки «Педагог среднего профессионального образования. Теория и практика реализации ФГОС нового поколения»
-
Курс повышения квалификации «Теория и практика инклюзивного обучения в образовательной организации в условиях реализации ФГОС»
-
Курс повышения квалификации «Дуальное образование как основа подготовки в СПО по ТОП-50»
-
Курс профессиональной переподготовки «Организация деятельности педагога-дефектолога: специальная педагогика и психология»
-
Курс повышения квалификации «Система работы специалистов ОО по подготовке учащихся старших классов к сдаче экзаменов»
-
Курс повышения квалификации «Специфика преподавания трудового права с учетом реализации ФГОС»
-
Курс повышения квалификации «Использование активных методов обучения при преподавании экономики в современном образовании»
-
Курс повышения квалификации «Образовательная кинезиология в практике психолого-педагогического сопровождения учащихся в условиях реализации ФГОС»
-
Курс повышения квалификации «Организация работы с обучающимися с ограниченными возможностями здоровья (ОВЗ) в соответствии с ФГОС»
-
Курс повышения квалификации «Методы интерактивного обучения»
-
Курс профессиональной переподготовки «Методическое сопровождение педагогического процесса в условиях реализации ФГОС»
-
Курс профессиональной переподготовки «Оказание психолого-педагогической помощи лицам с ОВЗ»
-
Курс профессиональной переподготовки «Музыка: теория и методика преподавания в сфере начального общего, основного общего, среднего общего образования»
-
Курс повышения квалификации «Инструменты и методы воспитания российской гражданской идентичности согласно ФГОС»