Привет! Сегодня на повестке дня у нас очень интересная тема. Думаю, ты уже задумывался о том, что можно собрать квадрокоптер своими руками. Идея и правда интересная. Выбирая этот, не самый простой путь, ты не только получишь хороший дрон, но и сможешь понять его устройство, и получишь много полезных знаний. А часть этих знаний ты впитаешь уже сегодня. Поехали!
Варианты
Перед началом стоит вспомнить – а какие же есть способы получить свой квадрокоптер? На самом деле их пять.
RTF

RTF (ready to fly) – Просто купить готовый коптер. Тебе останется его просто достать из коробки и запустить в полёт. Это хороший вариант, если тебе не интересны эти конструкторы, и ты хочешь просто удовлетворить свою потребность в БПЛА. Однако, это далеко не так весело, как оставшиеся варианты.
Комплект «всё включено»
Такой комплект подойдёт тем, кто хочет сделать дрон своими руками, но не собирается часами разбираться в документациях, калькуляторах и прочих тонкостях. Там всё так-же рассчитано производителем и подогнано. Нужно только собрать и настроить. Если ты сейчас выбираешь свой первый квадрокоптер, то это определённо твой выбор.
Комплект ARF

ARF (Almost Ready to Fly) – Тут всё слегка сложнее. Бывают разные степени «готовности». Где-то нужно докупить контроллер, а где-то в комплекте идёт только рама коптера. Собрать квадрокоптер, настроить и откалибровать придётся самому. Вариант для тех, кто хочет углубиться в тему и поковыряться в своём БПЛА.
С нуля
Это выбор продвинутых юзеров. Строить коптер с нуля — значит самостоятельно подбирать оптимальные компоненты, разрабатывать и изготавливать раму и так далее. Это сложный, но очень интересный путь, особенно, если не брать готовый модуль управления, а попытаться использовать Arduino или raspberry pi.
Из подручных материалов

Мы не ищем лёгких путей. Дедушкин гараж, алиэкспресс и помойка электроники – наш выбор. Путь боли, ПВХ труб и хардкора, но в результате ты получишь полностью самодельный квадрокоптер. Тут полный простор для фантазии, а все необходимые комплектующие и чертежи квадрокоптеров можно найти в интернете.
Инструкция по сборке квадрокоптера своими руками (для начинающих)

А теперь давай разберёмся с тем, как собрать квадрокоптер мечты. Сразу скажу, что это обобщённый гайд, и некоторые моменты могут отличаться. Я попытаюсь систематизировать процесс, и указать на основные моменты выбора и сборки.
Детали для сборки квадрокоптера.
Сборка квадрокоптера своими руками начинается с выбора компонентов. Это самый ответственный этап.
Комплектующие рамы

Несущая конструкция коптера крайне важна. От её характеристик зависит то, сколько лишней мощности у вас останется. Чем легче рама, тем она дороже. На счёт прочности особо напрягаться не стоит, если в ваши планы не входит постройка квадрокоптера для массивных камер. Есть три основных типа рамы – четырёхлучевая, шестилучевая и восьмилучевая. В данном случае мы будем отталкиваться от четырёхлучевой компоновки с одинарными двигателями (один движок на луч).
Также рама может быть оснащена складными лучами, но это уже очень дорого, и не очень нужно. Можно попробовать реализовать это самостоятельно.
Особенности при выборе компонентов
Моторы

Моторы советую брать чуть помощнее, чем нужно. Во-первых, если ты берёшь их в Китае, то их характеристики будут завышены. Во-вторых, это даст тебе больше простора. К примеру, если нужно будет повесить камеру потяжелее, или какой-либо другой модуль, то это не повредит лётным характеристикам.
Пропеллеры
Это тема достаточно объёмная. При выборе винтов нужно ориентироваться на свои потребности. Если это будет простенький коптер для «полетать», то можно смело брать пластиковые. Если же вы хотите настоящий рабочий агрегат для аэрофотосъёмки, или спортивный мини дрон (что не парадоксально, ибо там каждый грамм на счету) то желательно использовать композитные материалы. Ну и не жадничай. Переплата в 10 процентов может избавить от необходимости балансировки.
Пульт и приёмник

Для начала, грамотным решением будет взять пульт, у которого в комплекте есть приёмник. Тогда они будут уже спарены, и тебе останется только присоединить приёмник к управляющей плате. Пульт тоже не бери бездумно. Обычно, приличные экземпляры с большим радиусом действия начинаются от 1 000 рублей. Многие имеют кучу функций, которыми пользоваться будет невозможно. К примеру переключатели режимов есть, а плата режимов полёта и не поддерживает. Из-за этого вес и объём занимают бесполезные переключатели.
Регуляторы оборотов
Они характеризуются по мощности, виткам мотора, внутреннему сопротивлению, наличию реверса, точности работы и куче других страшных параметров. Если есть возможность – ищи комплект двигателей с контроллерами. Если так ты не хочешь, то придётся курить форумы и документацию. В принципе, если согласовать допустимый тип моторов и выдаваемую мощность, то шанс промахнуться минимален, но я этого не говорил. Перепроверь.
Батарея

Необходимая батарея рассчитывается при помощи калькулятора. Он учитывает много параметров, включая вес самого батарейного блока. Дешёвки снова не советую брать. Горит красиво, но слишком быстро. Если коптер – грузовой, и оснащён мощными моторами и прочим навесным оборудованием с высоким потреблением энергии, то не забудь проверить, хватит ли мощности аккумуляторов.
Камера
Ух, вот это самая жесть. Камера не всегда нужна, но если она нужна, то нужно внимательно подойти к её выбору. В качестве записывающей камеры стоит использовать экшн камеры- GoPro или её Китайские аналоги (они не сильно уступают в качестве видео, если даже не превосходят «фирму»). Нужно ориентироваться на вес, и на угол обзора. С весом всё понятно, а вот про угол расскажу.

Хочется, чтобы камера снимала красоты мира, но не снимала лучи коптера. Если ты промахнулся и это произошло, то придётся выбрать из двух плохих вариантов.
Опустить камеру так, чтоб она не задевала пропеллеры. Опускать, скорее всего, придётся сильно, и это вызовет массу проблем с взлётом и посадкой, а также с маневренностью, из-за смещённого центра тяжести.
Вынести камеру вперёд. Тоже беда. Снова сместится центр тяжести (в этом случае можно попытаться уравновесить при помощи АКБ). Ещё сильнее утяжелит конструкцию, ибо придётся придумывать очень мощный фиксатор. Иначе никакими бюджетными виброгасителями делу не поможешь, и эффект желе обеспечен.
Можно попробовать использовать ориентировочную формулу L= 2 * tg(A /2) х D, где:
- L — Область обзора камеры на расстоянии D
- Α — Угол обзора камеры
- D – расстояние до объекта (в нашем случае, до пропеллеров)
Ты получишь диаметр круга, но так как камера снимает прямоугольное изображение, то этот диаметр будет диагональю. Там уж можно примерно прикинуть- задевает, или нет.
Компоненты выбираем, руководствуясь необходимым результатом. Не нужно брать самое лучшее, если в этом нет необходимости. Возможности своей сборки ты можешь приблизительно рассчитать при помощи калькулятора.
Китайские детали
Сразу говорю – в Китае брать можно, но стоит намного серьёзнее подойти к вопросу. Китайцы постоянно завышают характеристики. Так что, нужно примерно понимать, как и что работает, и не вестись на россказни Китайца о небывалых параметрах и чудесном качестве. Короче говоря – можно, но с пониманием дела и на свой страх и риск.
Контроллер
Контроллер, это мозг твоего мультикоптера. Их можно разделить на два вида.

Универсальный: Например, DJI NAZA. Такой контроллер можно использовать с абсолютно любой сборкой. Будь то квадрокоптер, гексакоптер или октокоптер. Он не заточен под управление чем-то конкретным. На него можно подвесить кучу оборудования, он обладает многими функциями и датчиками.
Есть и минусы. Первый минус, это цена. Тот же DJI Naza-M V2 стоит 17 000 рублей. Второй минус- необходимость настройки. Для этого используется специальная программа, написанная под конкретный контроллер. Там можно заменить и отрегулировать практически всё, но это требует определённых сил, знаний и времени.
Специализированный: Как в последующем примере. Он уже заточен под работу с конкретной компоновкой коптера. Конечно, он даёт некоторый простор, но мощность на каждом двигателе вы не настроите. Стоит недорого, умеет мало. Самое то, для начала.
Пошаговая инструкция по сборке
Давайте условимся на том, что ты прочитал нашу статью про выбор набора для сборки квадрокоптера ,и воспользовался ценнейшем советом – брать раму с платой распределения. Если нет, то провода подключаем сразу к модулю управления.

Для примера рассмотрим сборку из следующих комплектующих:
- Каркас квадрокоптера Diatone Q450 Quad 450 V3 PCB Quadcopter Frame Kit 450mm
- Мотор DYS D2822-14 1450KV Brushless Motor. 4 штуки
- Регулятор DYS 30A 2-4S Brushless Speed Controller ESC Simonk Firmware
- Пропеллеры DYS E-Prop 8×6 8060 SF ABS Slow Fly Propeller Blade For RC Airplane
- Модуль управления квадрокоптером KK2.1.5 kk21evo
- Аккумуляторная батарея литий-полимерного типа Turnigy nano-tech 2200mah 4S ~90C Lipo Pack
- Устройство для зарядки аккумуляторов Hobby King Variable6S 50W 5A
- Коннектор для подключения аккумулятора XT60 Male Plug 12AWG 10cm With Wire
- Коннекторы 20 Pairs 3.5mm Bullet Connector Banana Plug For RC Battery / Motor
- Пульт управления квадрокоптером Spektrum DX6 V2 with AR610 Receiver (в комплекте с приёмником и передатчиком)
Примерная цена- 20 000 рублей
Размазываем компоненты по столу ровным слоем, и начинаем.
Этап первый. Сборка

- Примерно прикидываешь необходимую длину проводов контроллера, прибавляешь небольшой запас «на криворукость» и обрезаешь их до нужной длины
- Припаиваешь коннекторы к выходам регуляторов, чтобы потом проще было подключать моторы
- Припаиваешь регуляторы к плате разводки
- Припаиваешь коннектор аккумуляторного блока к плате разводки
- Прикручиваешь двигатели на лучи коптера. При установке моторов постарайся не сорвать резьбу
- Если коннекторов на двигателях нет, то припаиваешь и их
- Привинчиваешь лучи с двигателями к плате
- Крепишь регуляторы к лучам дрона. Не важно чем, но удобнее всего пластиковыми хомутами
- Подключаем провода регуляторов к двигателям в произвольном порядке. Если будет нужно – потом изменим
- Закрепляешь на корпусе модуль управления (предварительно сфотографировав тыльную часть. Пригодится). Снова хоть на жвачку, но советую пока использовать мягкий двухсторонний скотч
- Подключаешь регуляторы оборотов к контроллеру. В те порты, которые отмечены (+ — пусто), обычно подключается белым проводом к экрану
- Остатками скотча закрепляешь приёмник как можно ближе к блоку управления, и подключаешь нужные каналы к нужным портам. Используй документацию своего приёмника и фото тыльной стороны платы, чтобы разобраться какая пачка проводов за что отвечает
- Подключишь питание устройства от батареи, через коннектор
- Profit! Ты собрал свой квадрокоптер
Этап второй. Отладка

- Запускаешь двигатели (тут обычно всё по-разному, так что снова смотри документацию)
- Немного прибавляешь газ, и смотришь в какую сторону вращаются пропеллеры. Они должны вращаться так, как указано в схеме, которая прилагается к контроллеру. Иначе управление будет инвертироваться. Если что-то не так, то просто переворачиваешь коннектор, который соединяет двигатель и контроллер
- Когда всё вращается правильно – прикручиваешь верхнюю деталь рамы. Не заталкивай её на своё место. Если она встаёт туго, значит что-то пошло не так. Ослабь нижние винтики, а после установки затяни всё равномерно
- Закрепляешь блок с аккумуляторами
- Монтируешь адаптеры для пропеллеров на моторы
- Устанавливаешь пропеллеры, учитывая направление вращения моторов. Приподнятая часть лопасти должна смотреть в направлении вращения
- Готово.Твой коптер готов пережить первое включение!
Это был один из простейших примеров, с которого стоит начать. Конечно, если ты хочешь использовать камеру, GPS или более сложный контроллер, то конструкция будет сложнее. Поэтому, если вы не уверены в своих силах, то стоит начать с малого. Всё остальное можно прикрутить потом.
Однако, не стоит переоценивать сложность самоделки. Если нет цели собрать мультикоптер из ПВХ труб на базе ардуино (а такое тоже бывает), то в этом нет ничего, что не смог бы рядовой пользователь. Главное не теряться, читать и спрашивать, если что-то не понятно.
Заключение
Напоследок хочется внести в этот текст немного морали. Любое подобное занятие, будь то проектирование, или просто сборка – является мощнейшим образовательным инструментом. Главное, это просто начать. Ты начнёшь понимать многие тонкости, и научишься концентрировать внимание на важных моментах. Это относится не только к сборке коптеров.
Тебе придётся научиться искать информацию, гуглить, и разбираться в массе вещей. Они тебе не пригодятся в жизни, но ими ты не слабо прокачаешь интеллект. Дерзай, учись, развивайся, и не бойся экспериментировать!
Кстати, расскажи в комментах о том, что ты думаешь об этой теме. Также можешь подписаться на наши группы (кнопки внизу). Тебе не сложно — мне приятно. Удачи, пилот, и да прибудет с тобой подъёмная сила.
![]() Загрузка…
Загрузка…
Все началось с того, что нам очень понравилась FPV камера Caddx Tarsier 4K из-за принципа 2 в 1, так как не надо будет лепить экшен-камеры на раму квадрокоптера. Поэтому, было решено собрать квадрокоптер вместе с этой камерой, хоть она и предназначена для микро-квадрокоптеров.
Далее в статье мы объясним, каким образом была закреплена плата и сама камера в раме. Пошаговая сборка квадрокоптера своими руками под силу любому, кому интересна эта тема, в статье все рассказываем максимально подробно.
Содержание
- Что нужно для сборки квадрокоптера? Инструменты
- Вступление
- Электроника квадрокоптера и другие компоненты
- Сборка квадрокоптера. Собираем дрон своими руками
- Схема монтажа
- Сборка рамы
- Подключение моторов квадрокоптера: установка двигателей
- Установка полетного контроллера
- Монтаж проводов для камеры
- Монтаж приемника
- Установка видеопередатчика и пищалки
- Монтаж Caddx Tarsier 4K в стэк, в башню
- Последние штрихи
- Прошивка и настройка квадрокоптера после сборки своими руками
- Прошивка регуляторов оборотов в BLHeliSuite
- Прошиваем полетный контроллер в Betaflight Configurator
- Вкладка Система
- Вкладка Порты
- Вкладка Конфигурация
- Вкладка Питание и батарея
- Вкладка Приемник
- Вкладка Режимы
- Вкладка Моторы
- Вкладка OSD
- Вкладка Командная строка (CLI)
- Фотографии
- Таблица компонентов и примерная цена
- Заключение
Что нужно для сборки квадрокоптера? Инструменты
Набор инструментов стандартный, но без него у вас не получится собрать квадрокоптер. И так, вам потребуется следующий инструмент для пошаговой сборки квадрокоптера:
- Паяльник;
- Припой 63/37;
- Флюс активный или нейтральный (я использую ФИМ, активный, но активный флюс надо обязательно хорошо смывать, иначе будет разъедать контакты);
- Пинцет;
- Ключи под шестигранники и головка для гаек;
- Канцелярский нож или любой инструмент для обрезки проводов и снятия изоляции;
- Термоусадка;
- Зажигалка;
- Линейка или рулетка;
- Пластиковые стяжки;
- Фиксатор резьбы синий (можно использовать и красный, но в малых количествах);
- Мультиметр для прозвонки цепи на случай короткого замыкания.

Что еще понадобится именно для этой сборки:
Вступление
Когда вышла эта камера, очень уж захотелось применить ее в обычном мини квадрокоптере, хотя предназначена они для микро дронов. Основной причиной выбора была компактность, качество видео и экономия места, потому что больше не нужно будет навешивать экшен-камеры на дрон и производить лишние манипуляции. Плюсом будет и то, что к камере можно подключаться по Wi-Fi (она создает свою точку доступа) и скачивать видео на телефон, смотреть видео с камеры в реальном времени (хоть и с задержкой), а также производить настройки.
Ну и конечно же, это камера умеет записывать видео, при этом, наверху дрона ничего не будет торчать.
Не забывайте, что пошаговая сборка квадрокоптера это творчество и не обязательно следовать инструкциям и делать так, как показано в статье. Вы можете включить фантазию и сделать иначе или вообще этого не делать. Это хобби, которое должно приносить удовольствие от конструирования, настройки — пользуйтесь этим и не ставьте себе рамки/ограничения.
Читайте также: Caddx Tarsier 4K — FPV камера с топовым разрешением и двумя объективами
Электроника квадрокоптера и другие компоненты
Инструменты перечислили, теперь нужно перечислить и компоненты, из которых собирается квадрокоптер:
- Рама;
- FPV камера (в нашем случае, а это Caddx Tarsier);
- Полетный контроллер с регуляторами оборотов 4 в 1 (там же и плата распределения питания);
- Видеопередатчик;
- Приемник;
- Аккумулятор;
- Антенна для видеопередатчика;
- Крепления для аккумулятора.
Все ссылки на компоненты вы найдете в конце статьи в виде таблицы.
Сборка квадрокоптера. Собираем дрон своими руками
Схема монтажа
Подключать все компоненты будет согласно этой схемы:
Сборка рамы
В качестве базы была выбрана классическая рама 115 мм под названием Martian. Стандартный тип — Гибридный X:

Фиолетовые стойки придают стильности и цвета сборке.
Собирается легко, в наборе идет напильник, которым можно при желании обработать углы деталей, они могут быть острыми. Сначала собирается нижняя плашка с нижними лучами.
Стойки пока не устанавливайте, так как они в дальнейшей сборке будут мешать паять провода. Я поторопился и прикрутил их, после чего снова открутил.
Здесь вам понадобится шестигранник, а также головка для гаек, чтобы затянуть нижнюю часть.
Затем, установите пластиковые стойки для установки башни из регулятора оборотов, полетного контроллера и так далее. С обратной стороны они затягиваются винтами

Для того, чтобы регуляторам оборотов было мягче «сидеть» на стойках, наденьте на них силиконовые демпферные колечки. Они идут в комплекте с рамы:

Затем, вам нужно взять регулятор оборотов, и залудить контакты, к которым будет припаивать провода двигателей. Если впервые паяете, то для начала смажьте паяльным флюсом площадки, затем возьмите припой и тут двумя способами: либо приложите проволоку припоя к контакту и расплавьте паяльником, либо расплавьте припой на жало паяльника и после этого приложите каплю к контакту. После этого установите регулятор(ы) оборотов на стойки:
Подключение моторов квадрокоптера: установка двигателей
Второй этап пошаговой сборки квадрокоптера. Раньше было популярно производить двигатели с правой и левой резьбой, чтобы в процессе полета гайки всегда самозатягивались, но в последнее время все чаще производители продают двигатели с резьбой на валу только в одну сторону. Но это совсем не проблема, так как используются контр-гайки, которые и так не будут откручиваться. Плюсом к этому будут минимальные допуски — пропеллеры садятся туго и держатся крепко даже без гаек.
Поэтому, просто покупайте сразу по 4 штуки двигателей без привязки к стороне, в которую они должны крутиться, это мы потом поправим при настройке прошивки.
Чтобы все смотрелось красиво, можно использовать оплетку жгутов или шнуров, например, вот так:

А можно использовать просто термоусадку. Будет менее красивее, но защита такая же.
В комплекте с двигателями будут идти 2 размера винтов, для толстой рамы и для тонкой рамы. Так как у этой рамы лучи толщиной 5 мм, то используйте самые длинные винты. До оплетки двигателя они не достанут.
Теперь вам потребуется фиксатор резьбы. Продается в любом магазине автозапчастей. Использовать желательно синий, но если остался красный, то просто лейте его в очень малых количествах на резьбовые соединения. Выглядит он так:

Смажьте винты и прикрутите двигатели к раме. Будьте аккуратны и не сорвите резьбу.

После того, как прикрутите двигатели, отмерьте длину проводов, которую нужно будет оставить для припаивания. Отмерять нужно на напрямую, а с учетом изгибов. Вот так:
Провода припаиваются также, как идут от двигателя — по порядку, хотя и можно нарушить порядок и поменять крайние провода местами, тогда двигатель начнет крутиться в другую сторону. А вот средний провод перепутать нельзя, он должен быть обязательно по центру и припаян к средней площадке.
После того, как отмерите, отрежьте лишнее, удалите изоляцию с концов, залудите. Отмерьте и отрежьте кусок термоусадки, либо оплетки и наденьте на провода:
Теперь все это дело нужно припаять. Прогревать надо хорошо, чтобы получился качественный контакт, иначе у вас могут возникнуть проблемы в виде того, что при запуске двигатели будут отключаться (как один из вариантов):
Затем проходим по термоусадке зажигалкой или феном для пайки, чтобы она стянулась.
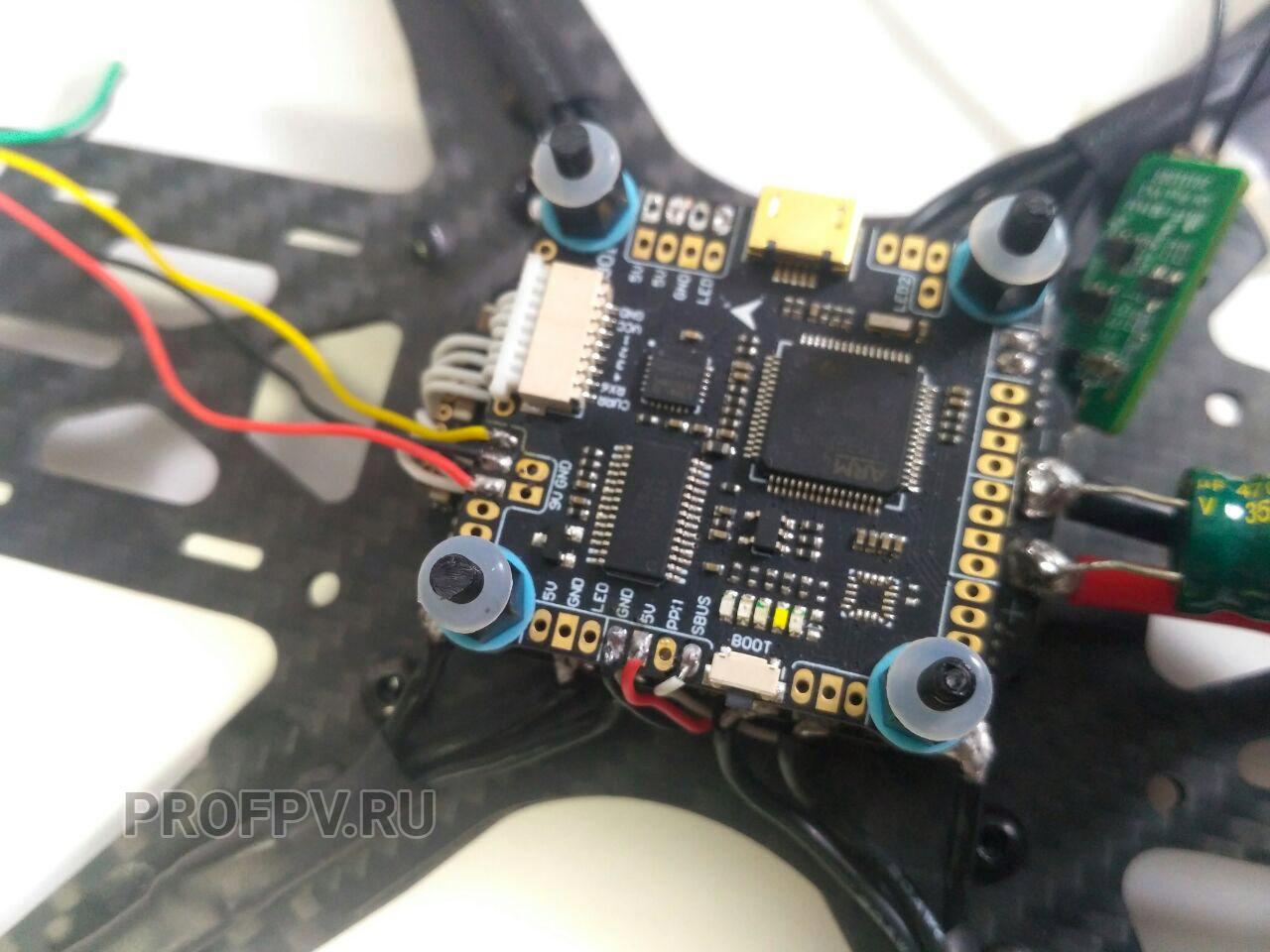
Установка полетного контроллера
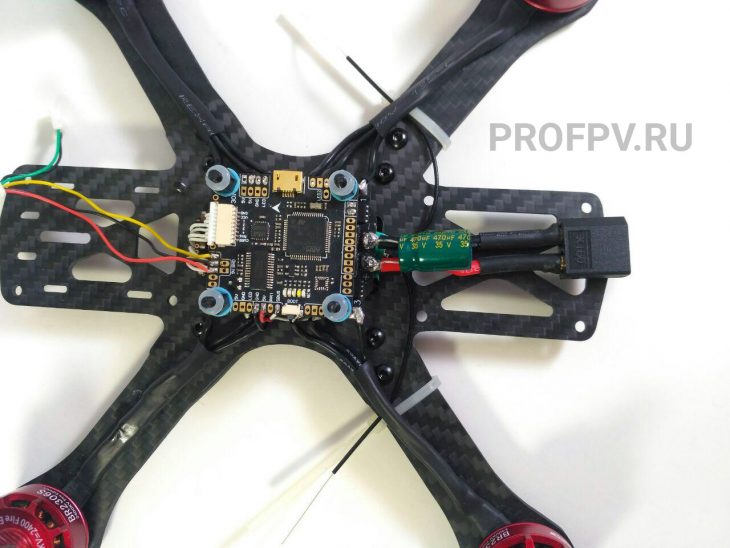
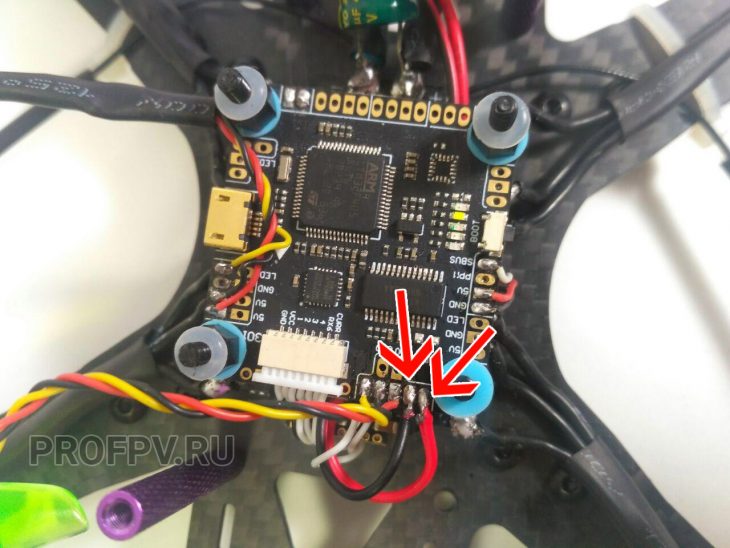
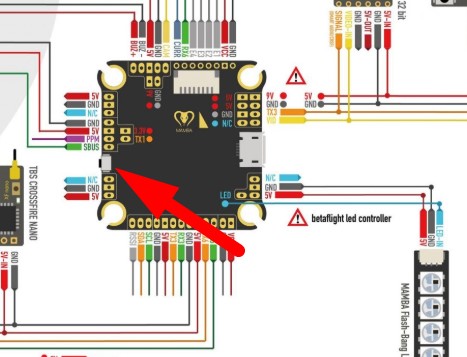
Пошаговая сборка квадрокоптера включает в себя установку полетного контроллера. Вам нужно припаять провода и конденсатор для подключения аккумулятора. Забыл сфотографировать этот момент, поэтому фото уже после нескольких шагов. Соблюдайте полярность. В комплекте с Mamba F405 шли короткие провода, поэтому пришлось наращивать дополнительные, чтобы хватало удобно подключать аккумулятор. Изначально припаял короткие, подумав, что будет удобно подключать, но после сборки понял, что не совсем и быстренько переделал их. Делайте так, чтобы провод выходил за раму на несколько сантиматеров. Места контактов тоже оборачиваем в термоусадку. На конденсаторе есть «+» и «-«, это все хорошо припаиваем к плате с регуляторами оборотов. Контакт должен быть хороший, поэтому, дайте припою прогреться:

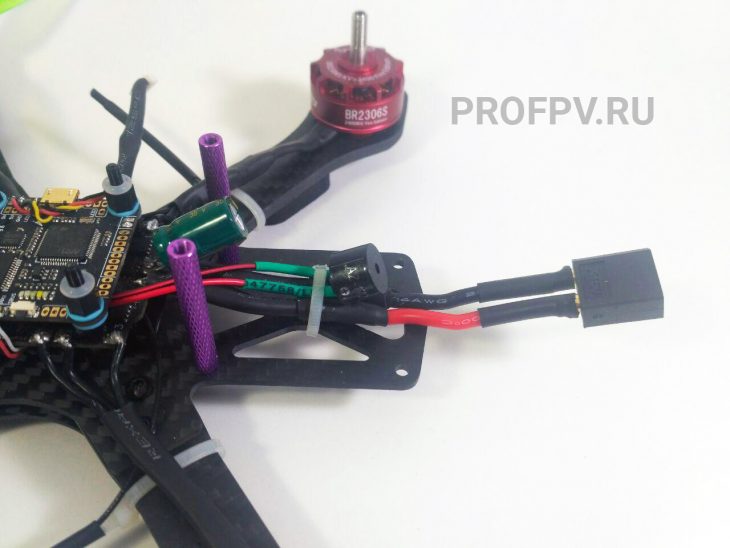
Далее устанавливаем на пластиковые стойки полетный контроллер. В комплекте идут синие демпферные амортизаторы. Они нужны, чтобы гасить вибрации и колебания, чтобы не мешать работе гироскопу. Наверх насаживаем пластиковые гайки и затягиваем, но не сильно туго. Подключаем белый коннектор от регуляторов оборотов к полетному контроллеру. Как видите, к этому этапу были убраны почти все фиолетовые стойки, потому что мешали. Не повторяйте эту ошибку и не ставьте их раньше времени:
Монтаж проводов для камеры
Далее припаиваем провода от камеры. Согласно схемы, мы можем припаять контакты к этим площадкам:


На фото выше:
- желтый провод — видео;
- черный — земля;
- красный — 5 V.
Отходящий проводок (зеленый + черный) это контакт для подключения джойстика управления камерой. Но Caddx Tarsier 4K настраивает с телефона через приложение, поэтому, если хотите, можете отрезать лишние провода.
Монтаж приемника
Приемник используется FrSky XM+.
Припаиваем к нему 3 провода:
- Белый — сигнал;
- Красный 5 V;
- Черный — земля.
Провода припаиваете как показано на фото ниже (на обратной стороне есть маркировка):
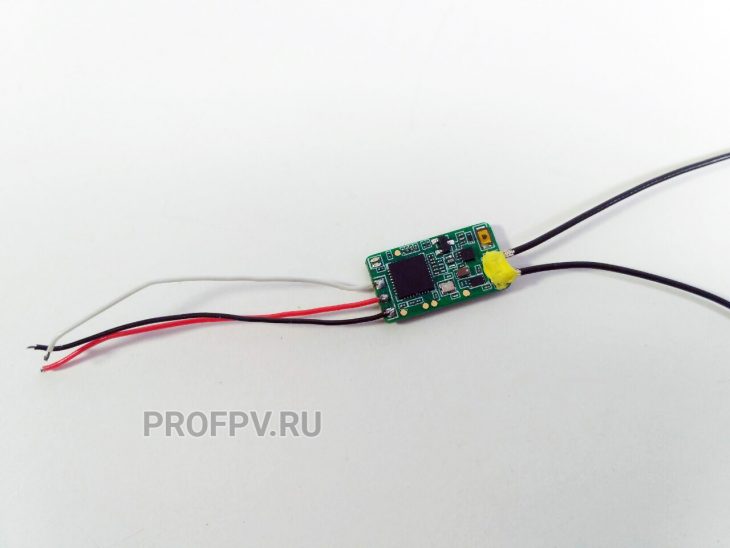
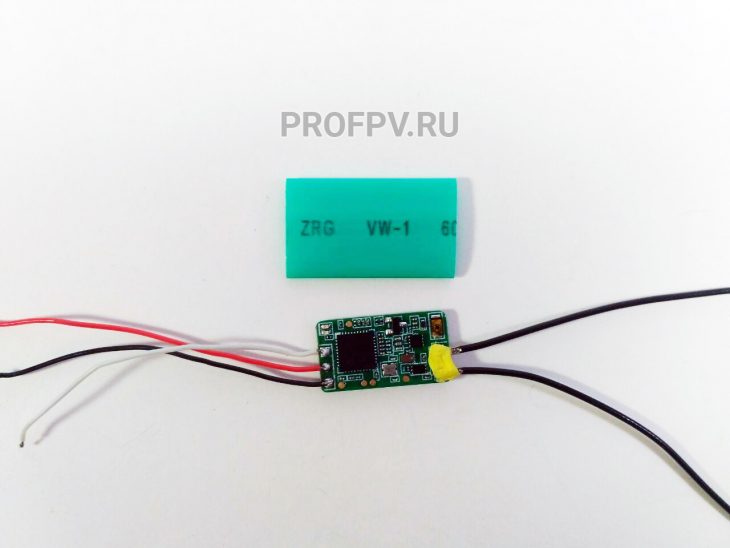
Сразу отрезаем по размеру термоусадку. В нее спрячем приемник после монтажа.
Просовываете провода под низ полетного контроллера. Припаиваемся к этим контактам:
Должно получиться вот так.
На этом этапе сборки квадрокоптера нужно привязать приемник, пока вы его не спрятали в термоусадку. Берем радио, включаем, настраиваем модельку (даем имя), ставим на строчке Ch. Range — Ch1-16, Mode D16. Доходим до вот этой строчки и нажимаем колесиком на нее: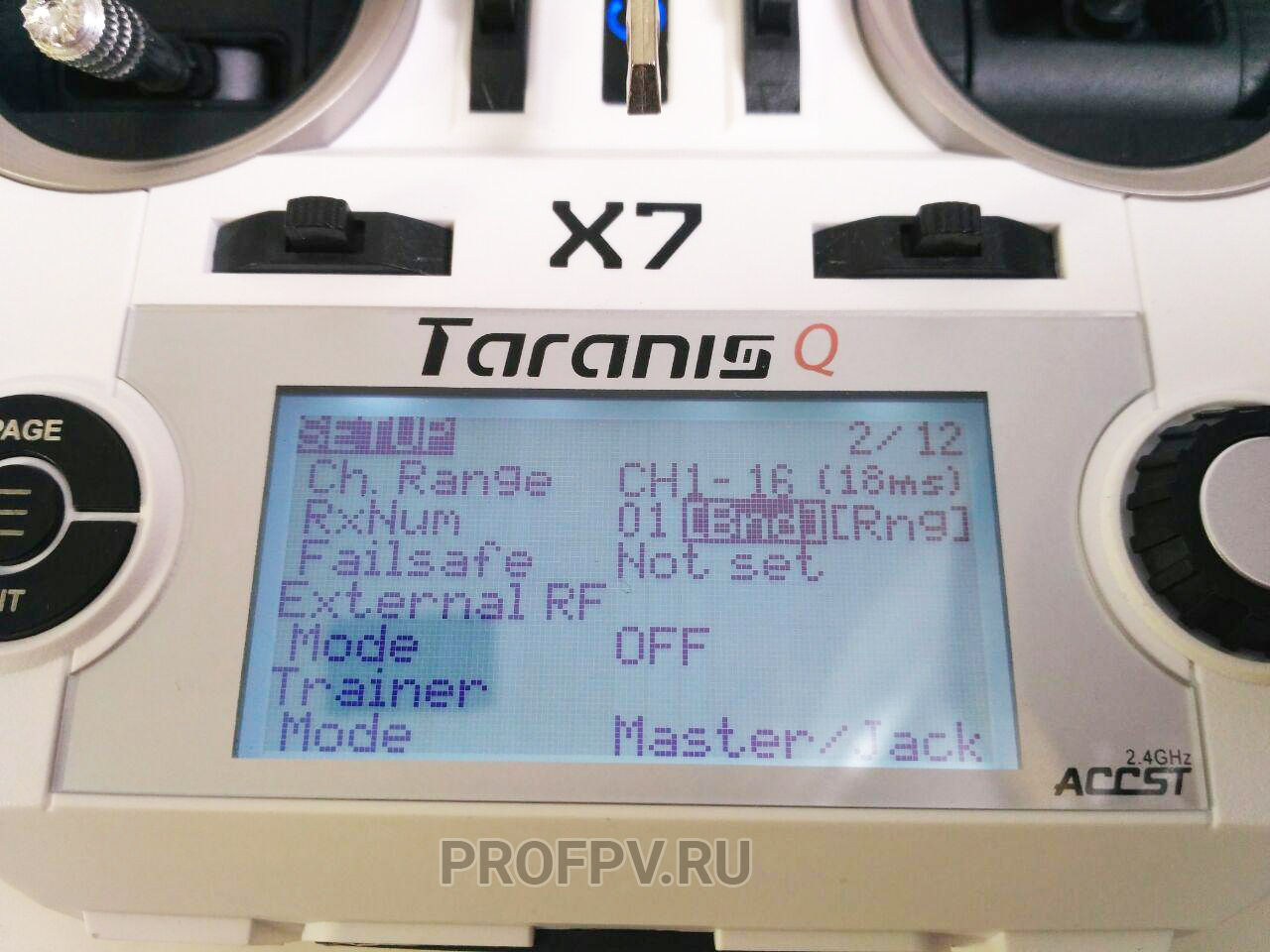
Нажимаем кнопку на приемнике, она находится сверху слева и подключаем полетный контроллер по USB к компьютеру, чтобы подать питание на приемник. Загорится зеленый светодиод, а красный будет моргать. Теперь отпускаем кнопку и снова нажимаем на аппаратуре колесиком на BND, чтобы выйти из режима привязки.
Все, вы успешно привязал приемник.
Надеваем термоусадку, усаживаем ее и заталкиваем приемник под полетный контроллер. Снаружи оставляем антенны. Мы их прикрепим к лучам рамы. Обязательное условие хорошего сигнала: антенны (если их 2), должны составлять угол 90 градусов между собой.
Чтобы у нас все получилось, берем 2 пластиковые стяжки и крепим их таким образом на лучи рамы:

Отрезаем по размеру термоусадку и надеваем. Затем усаживаем зажигалкой или феном:


Получится вот такое:

Таким образом, у вас получится идеальный угол в 90 градусов, а сами антенны прочно закреплены.
Установка видеопередатчика и пищалки
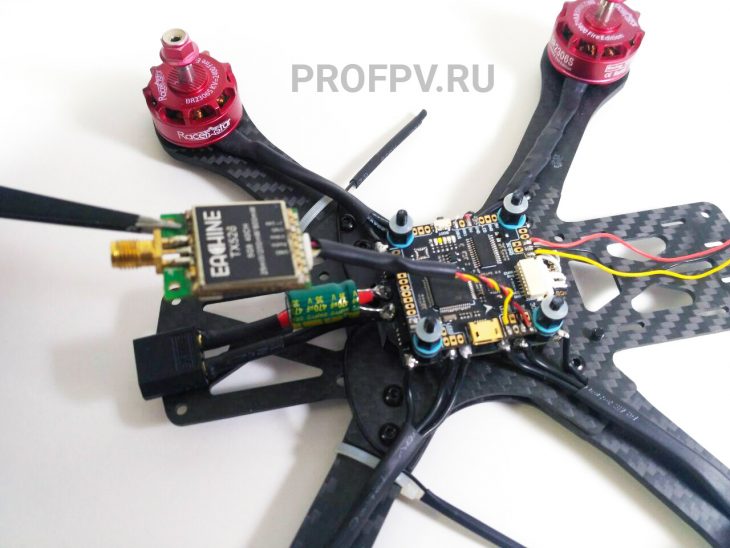
Сборка FPV квадрокоптера не обойдется без видео. Видеопередатчик используется классический: Echine TX528 и мы подключаем его к полетному контроллеру. Если провода у видеопередатчика длинные, то укорачиваем их до той длины, чтобы можно было прикрепить видеопередатчик к краю верхней планки рамы и провода не висели. Чтобы минимизировать помехи в видео, провода скручиваем в жгут. По схеме, мы можем припаиваться к этим контактам:

Пищалку припаиваем рядом с контактами на камеру. Пищалка нужна для звукового сопровождения различных уведомлений, а также для поиска упавшего квадрокоптера. В общем, это необходимая вещь. Пищалки нужны с встроенным генератором. Провода (черный и красный) припаиваем сюда:
Провода пищалки также просовываем под полетным контроллером. На выходе с задней стороны, привязываем пищалку и кабель питания пластиковой стяжкой к раме.
Видеопередатчик крепим пластиковыми стяжками к верхней панели, попутно прикрутив антенну:
Монтаж Caddx Tarsier 4K в стэк, в башню
Пошаговая сборка квадрокоптера своими руками включает самое интересно — монтаж платы камеры в стэк к полетному контроллеру и регуляторам оборотов, а также монтаж модуля камеры на распечатанные на 3D принтере переходники.
Начнем с переходников. Вставляем в них маленькие гайки М2:
Прикручиваем эти переходники к камере винтами подходящего размера на 6 или 8 мм, чтобы все держалось крепко:

Берем боковые панельки, на которые будем закреплять камеру. Берем сверло на 2, примеряем (чтобы камера была по середине) и сверлим по 2 отверстия для крепления переходников, но мне хватило 1 отверстия, так как второе попало ровно в готовое отверстие (решетка):
Теперь переходим к креплению самой платы на башню. Так как плата камеры имеет размер 29 * 29 мм, а монтажные отверстия 20 * 20 мм, то естественно просто так ее не установить. Поэтому, было решено взять информационную панельку от Mamba F405, просверлить сверлом на 2 мм 4 отверстия, закрепить плату и все то дело установить на стандартные 30 * 30 мм. Винты нужны будут также М2 на 12 мм из набора.
Металлическая панелька с синей резиной — это радиатор платы камеры.
Нужно сместить все в одну сторону, иначе потом не закрутите гайками саму панель.
В итоге, получилась вот такая композиция:
Гайки влезут только с одной стороны, но держаться будет все крепко, проверенно неоднократными полетами и падениями на этом дроне. Не забудьте подложить резиновые колечки из набора полетного контроллера (их там много).
Остается смонтировать панельки к переходникам камеры. Откручиваем камеру от переходников, прикручиваем переходники к панелькам и снова закручиваем камеру к переходникам. Устанавливаем на место:


Крепим верхнюю панель к раме:
Последние штрихи
Аккумулятор в этой сборке квадрокоптера будет крепиться сверху. Так как там шляпки винтов, то нам необходимо сгладить эту поверхность. Для этих целей был выбран кусок резины (камера от велосипеда) и 2 полоски двустороннего скотча:

В сборке FPV квадрокоптера можно применить любой материал, помните, этот квадрокоптер собираете вы сами и так, как вы хотите, поэтому используйте фантазию, не обязательно следовать тому, как показано здесь.
Итоговый вид квадрокоптера:
На этом с технической частью закончено и пора переходить к программной: прошивка и настройка!
Прошивка и настройка квадрокоптера после сборки своими руками
После сборки квадрокоптера, переходим к настройке и прошивке квадрокоптера. Вам понадобится:
- Betaflight Configurator;
- BLHeliSuite;
- Кабель USB — microUSB.
Скачать Betaflight Configurator и BLHeliSuite можно на этой странице: Как и где скачать Betaflight Configurator и BLHeli
Если при подключении квадрокоптера к компьютеру он не видит полетный контроллер, то вам нужно сделать следующее:
- Качаем по ссылке https://www.st.com/en/development-tools/stsw-stm32102.html STM32 Virtual COM Port Driver — там нужно согласиться на использование драйвера и ввести свою почту, на которую придет ссылка для скачивания. Без этого драйвера вы не подключитесь ни к одному конфигуратору. Устанавливаем драйвер. Откройте файл Readme в архиве — там написано в разделе «How to use», чтобывы зашли в директорию установки и запустили файл dpinst_x86.exe или dpinst_amd64.exe.
- Если это не помогло и вы намудрили с драйверами, попробуйте поставить прошлую версию драйвера. Более подробно в статье:
Taranis не определяется в симуляторе, настройки USB и JOYSTICK
Прошивка регуляторов оборотов в BLHeliSuite
Сначала нам нужно открыть BLHeliSuite и прошить регуляторы оборотов. На нужна версия без 32 и на момент опубликования, она называлась BLHeliSuite16714901.
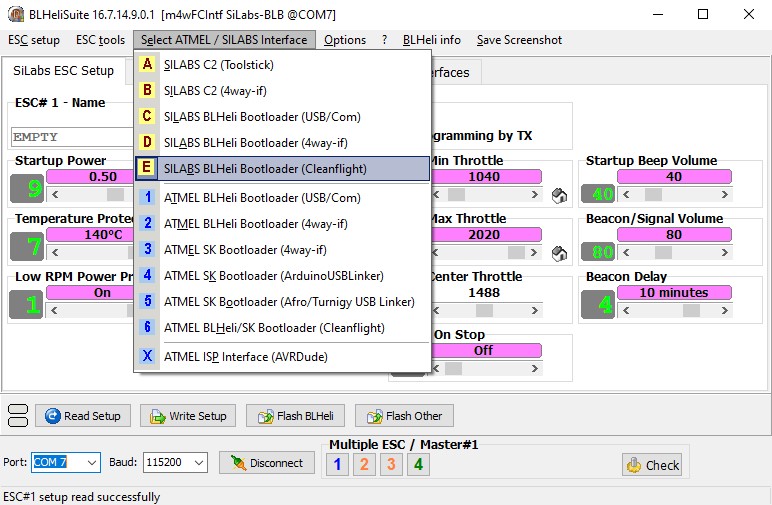
Запускаем и открываем. Сверху выбираем для Cleanflight:
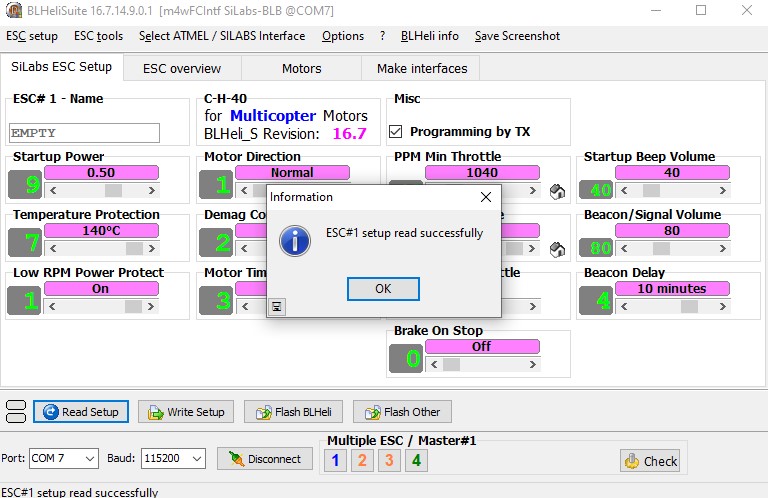
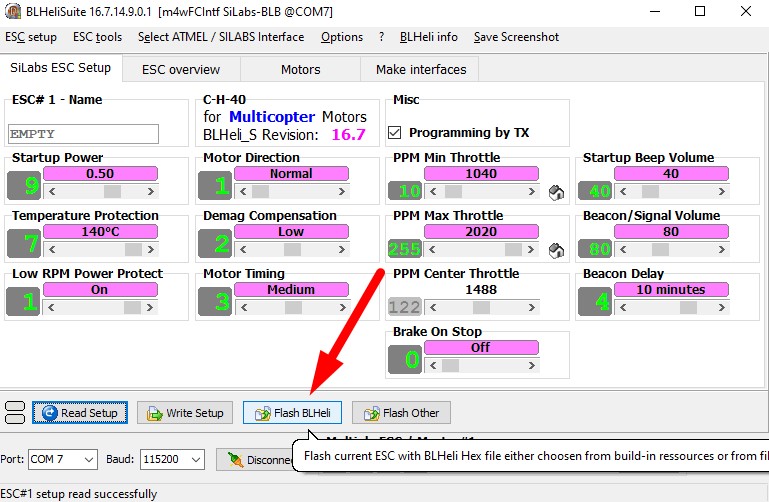
Внизу выбираем нужный порт (чтобы узнать какой, подсоедините USB к полетному контроллеру и посмотрите, какой порт появился в списке. Это же можно посмотреть и в диспетчере устройств) и нажимаем Read Setup, чтобы прочитать настройки.
Не забудьте снять пропеллеры!
Программа скажет, что настройки прочитаны успешно:
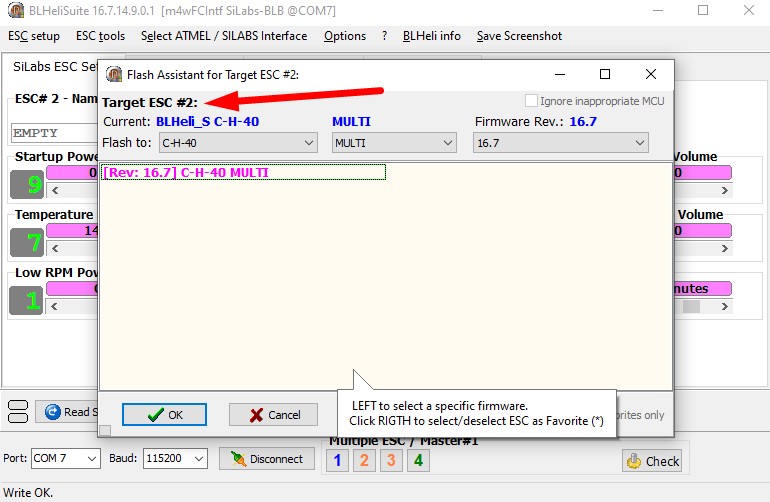
Нажимаем Flash BLHeli:
Далее вам система предложит выбрать версию прошивки и прочие схемы, везде соглашаемся и ничего не меняем:
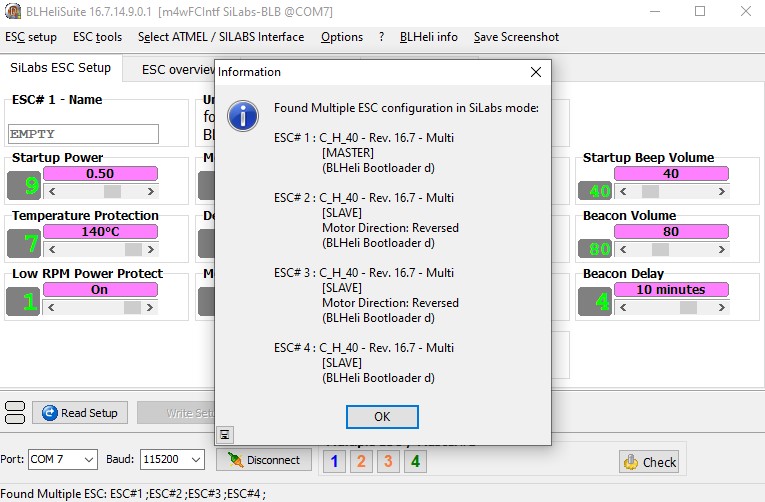
В конце программа предложит прошить второй регулятор оборотов. Делаем все тоже самое, так как их 4 штуки:
В конце программа сообщит, что все 4 регулятора оборотов прошиты:
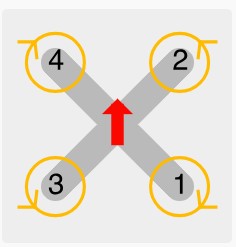
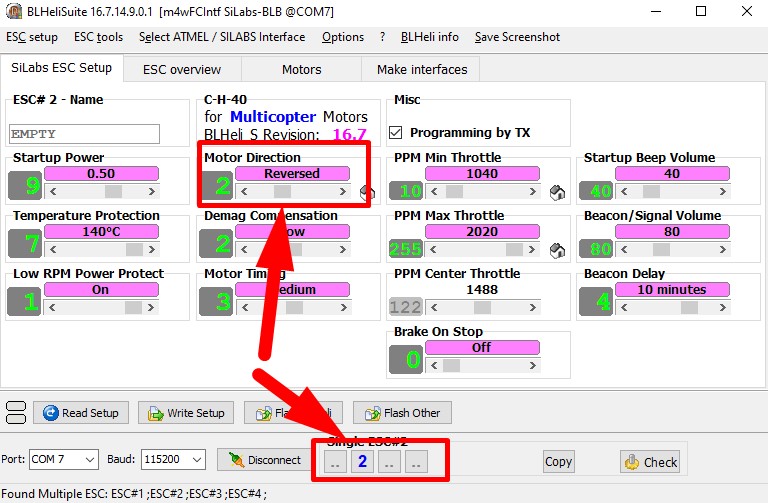
В этой же программе можно будет менять направление вращения моторов, это нужно, чтобы квадрокоптер смог летать. Вращаться они должны по такой схеме:
В этой программе вы также сможете настраивать музыку, которая звучит при включении и сочинять свою. Программа для тонкой настройки регуляторов оборотов. Но если вам не хочется разбираться в настройках и просто нужно прошить регуляторы, то вам подойдет простое приложение — BLHeli Configurator.
Для простой прошивки регуляторов, читайте статью: Как прошить полетный контроллер и ESC BLhelli. Прошивка квадрокоптера
Здесь все гораздо проще и интуитивно понятно.
Прошиваем полетный контроллер в Betaflight Configurator
Зажимаем кнопки BOOT на полетном контроллере и подключаем к компьютеру через USB-кабель.
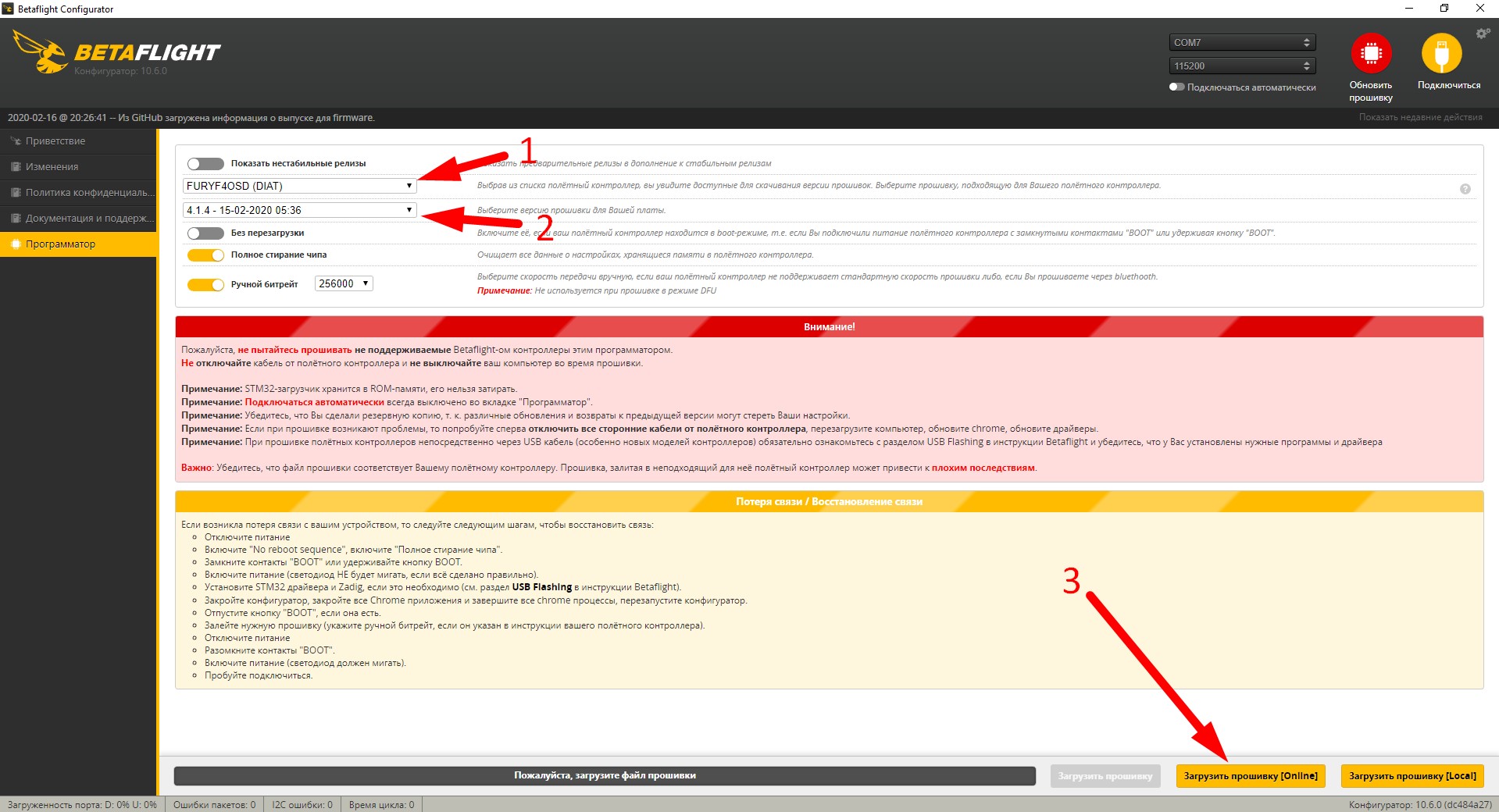
Открываем Betaflight и переходим на вкладку «Программатор» и выбираем цель и версию прошивки. Выбираем в первой строчке FURYF4OSD (DIAT) и самую последнюю (новую) версию прошивки. Остальное не трогаем. Потом нажимаем «Загрузить прошивку онлайн»:
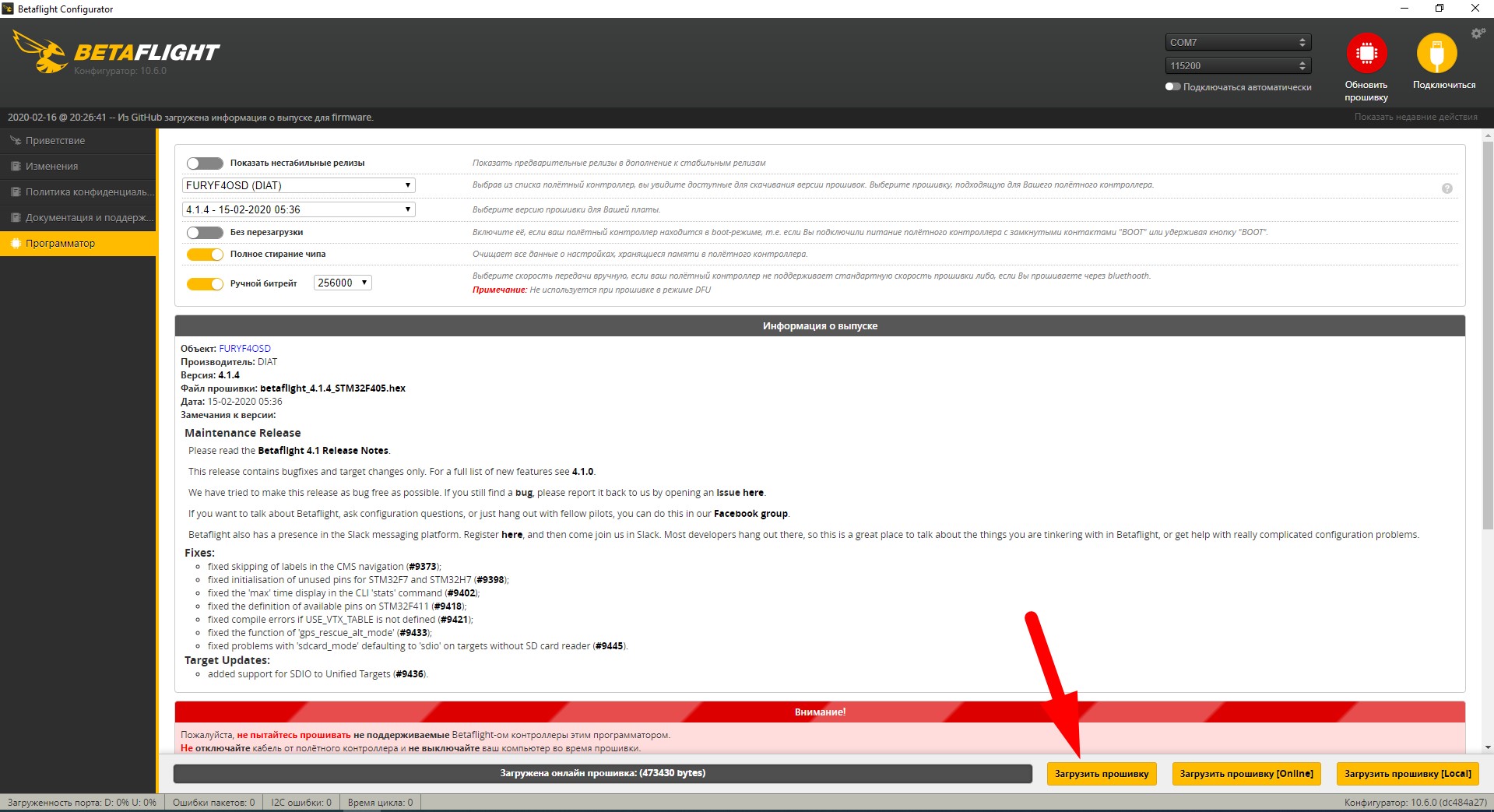
После того, как скачалась прошивка, жмем «Загрузить прошивку«:
Начнется процесс прошивки, после окончания можно нажать кнопку «Подключиться» в верхнем правом углу.
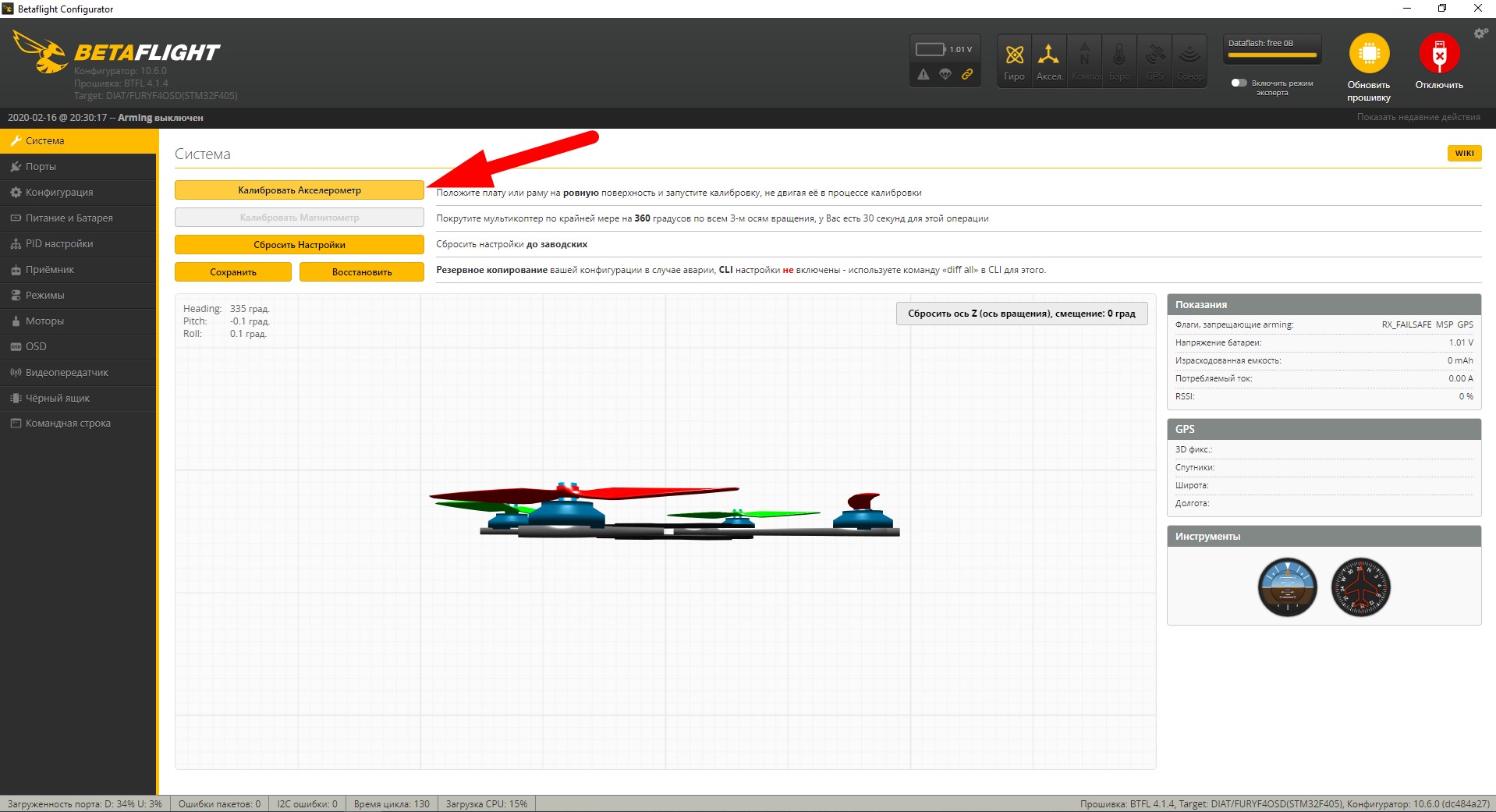
Вкладка Система
На главном экране калибруем акселерометр:
Вкладка Порты
На UART1 ставим Serial RX — это порт для приемника.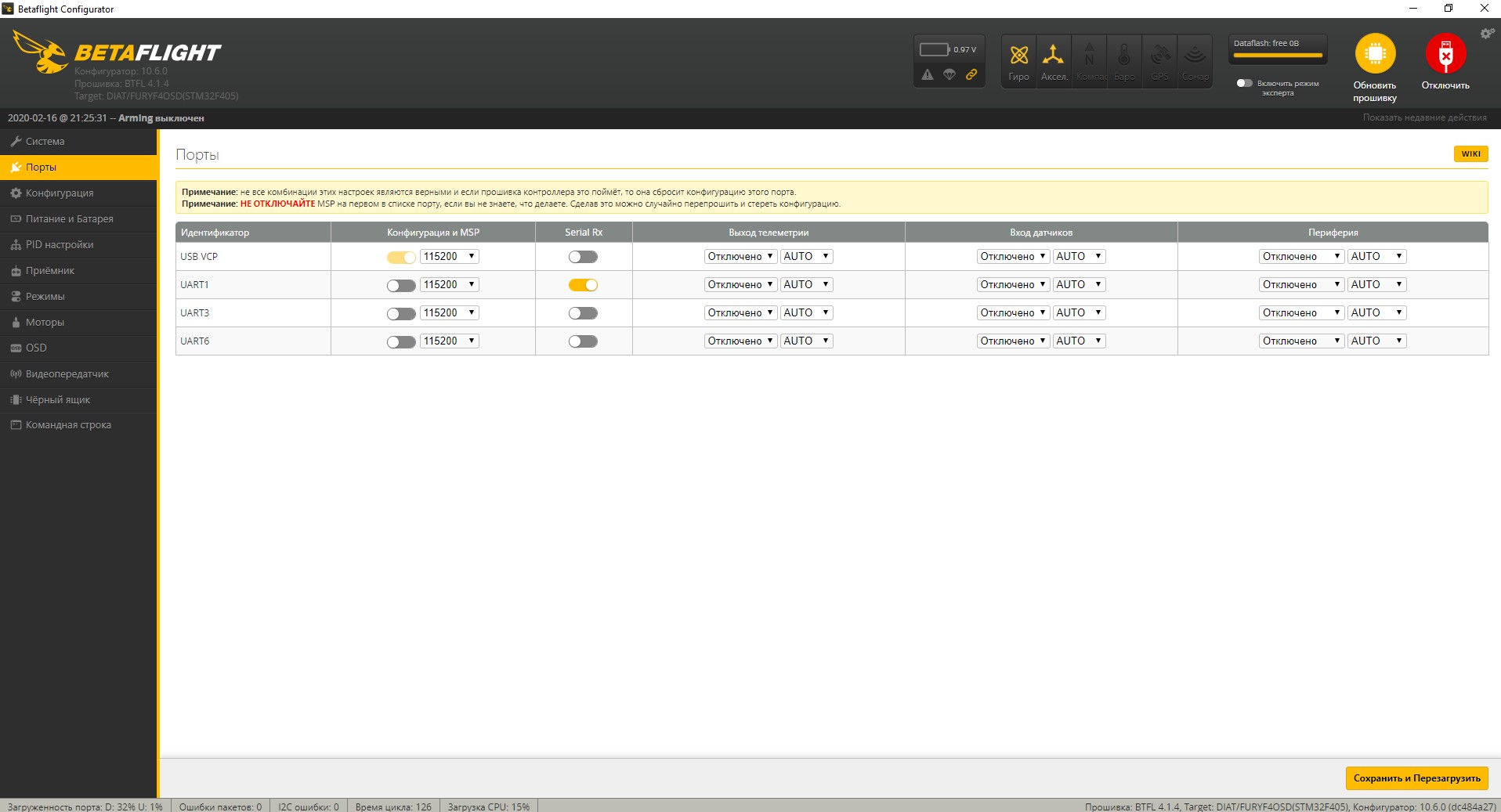
Жмем «Сохранить и перезагрузить«.
Вкладка Конфигурация
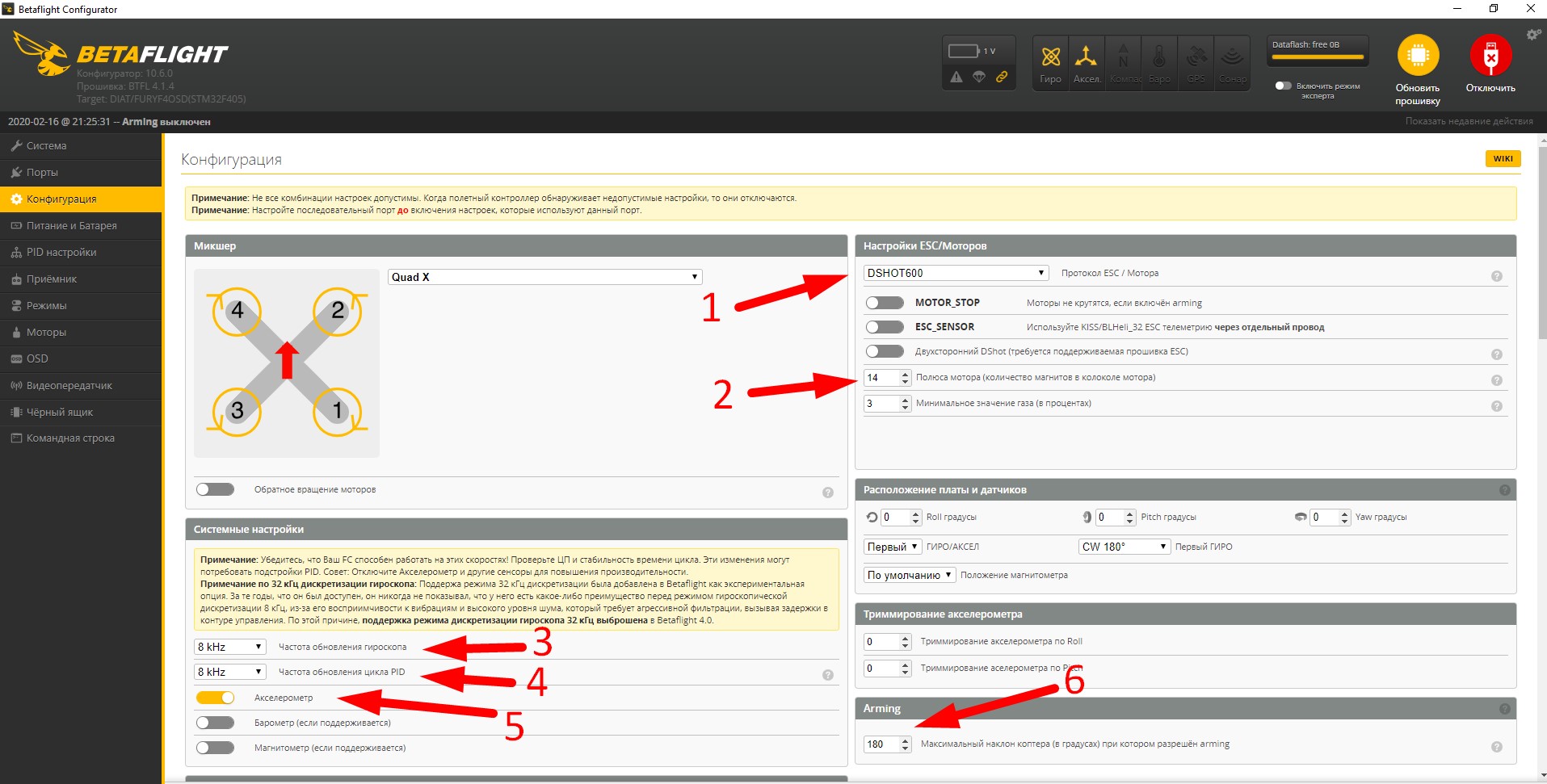
Что на изображениях:
- Протокол для общения Полетный контроллер — регуляторы оборотов: ставим DSHOT600;
- У моторов в сборке 14 магнитов в колоколе. Если вы используете другие двигатели, то считайте;
- Частота обновления гироскопа. Ставим 8kHz;
- Частота обновления ПИДов: ставим 8kHz;
- Включаем акселерометр;
- Максимальный наклон квадрокоптера. Ставим 180, тогда вы сможете заармить дрон почти в любом положении.
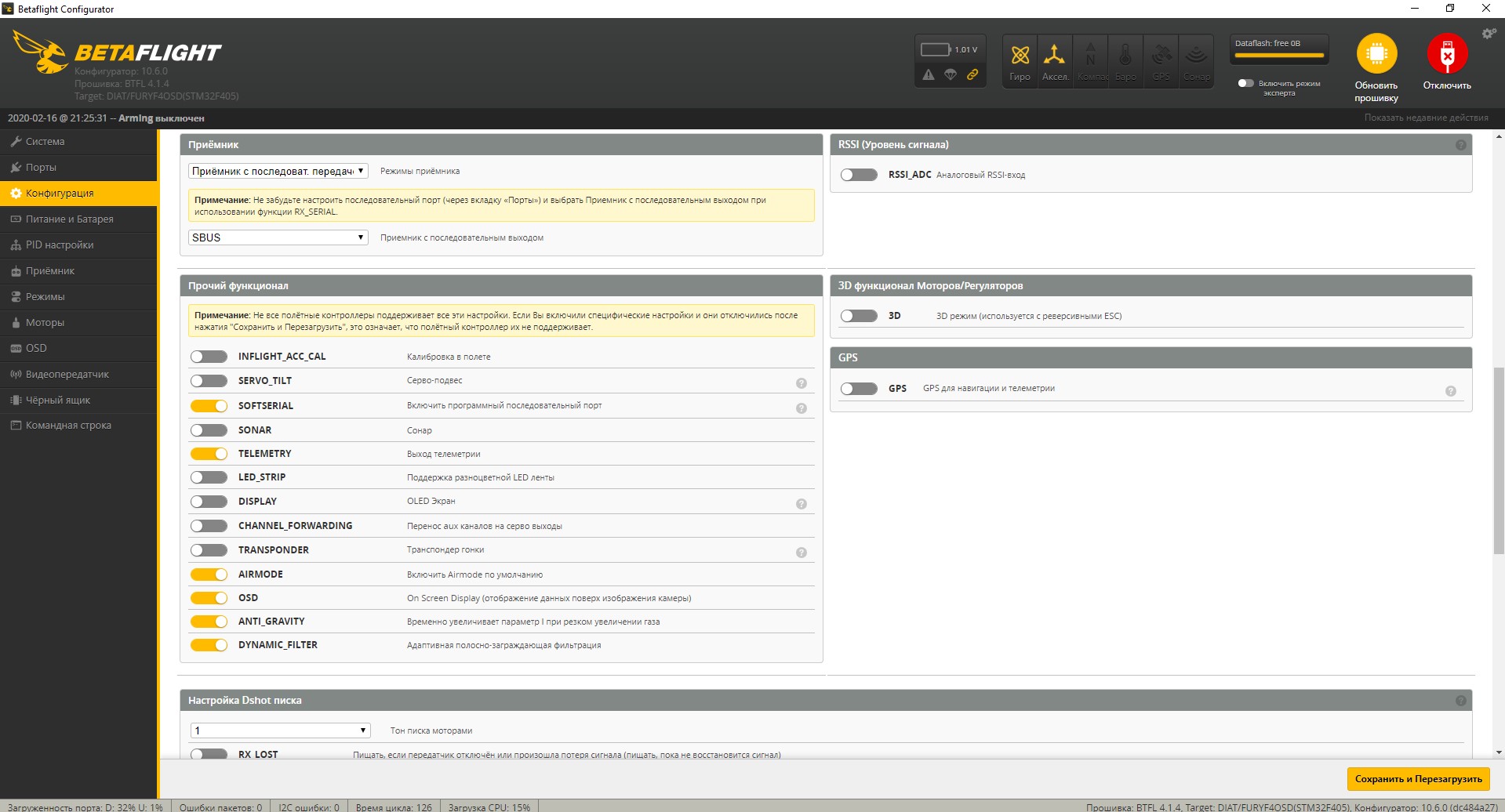
Блок «Приемник»: здесь выбираем строчку «Приемник с последовательной передачей данных«. Ниже выбираем «SBUS«, так как приемник у нас работает на этом протоколе.
Блок «Прочий функционал»: включаем строчки, как на скрине. Если планируете подключить адресную светодиодную ленту, то включаем и LED_STRIP. Остальное включается под индивидуальные задачи и сейчас их включать не требуется.
Жмем «Сохранить и перезагрузить«.
Вкладка Питание и батарея
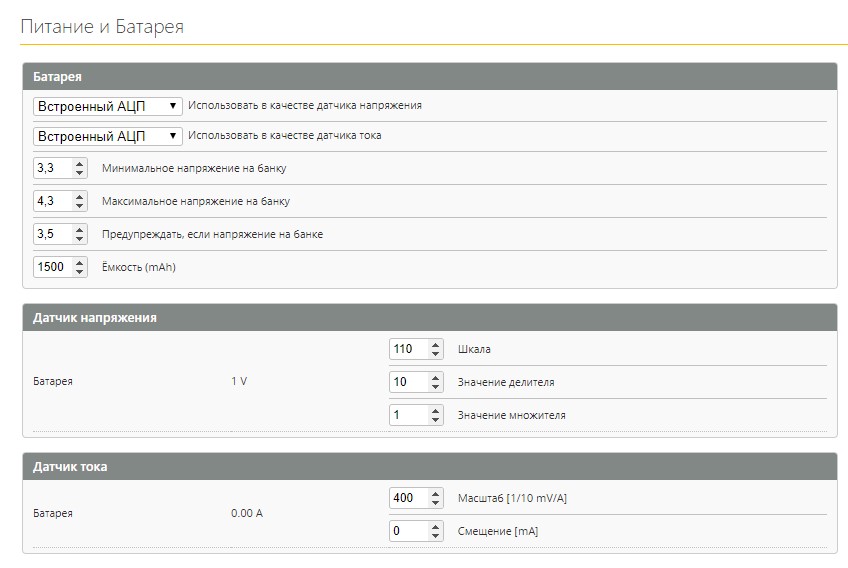
Здесь все стандартно — просто настраиваем характеристики ваших аккумуляторов.
Жмем «Сохранить и перезагрузить«.
Вкладка Приемник
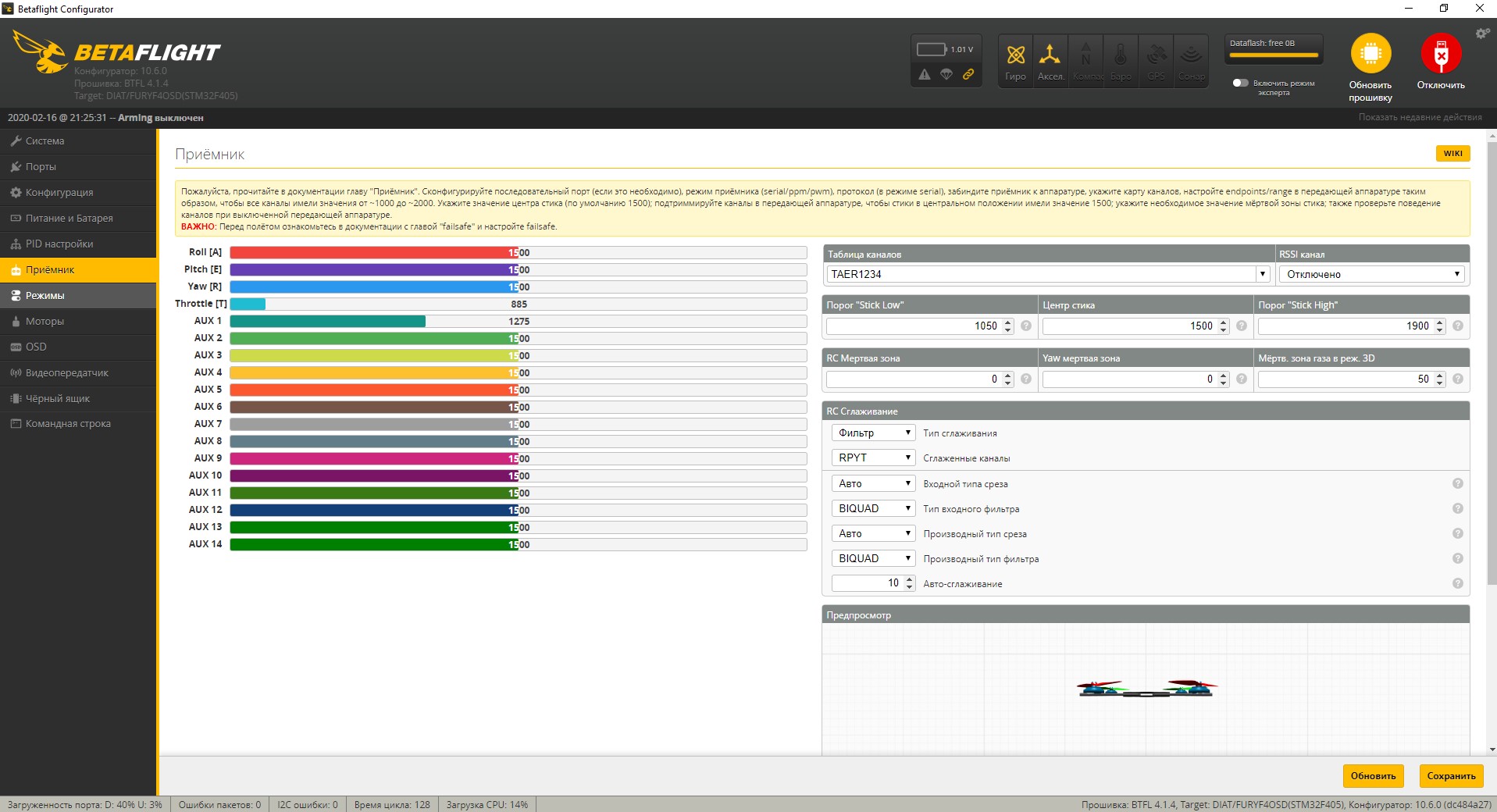
Таблица каналов выбирается и прописывается исходя из таблицы каналов вашей аппаратуры. Данный дрон управляется с помощью аппаратуры управления Taranis QX7 и у него по умолчанию таблица TAER1234. Ее можно менять непосредственно в самой аппаратуре.
Читайте также: Обзор FrSky Taranis QX7
Для проверки, что все работает: подключаем аккумулятор и аппаратуру управления. Двигаем всеми стиками и тумблерами в разные стороны. Разноцветные полоски должны реагировать на каждое движение элементов пульта.
Если вы используете аппаратуру Taranis, то скорее всего у вас тут не будут реагировать тумблеры. Для этого нужно зайти в меню, дойти до MIXER и назначить каналу тумблер. Подробнее, как это сделать на видео ниже:
После этого, у вас начнет отображаться 5 канал в Betaflight и будет реагировать на переключения.
Вкладка Режимы
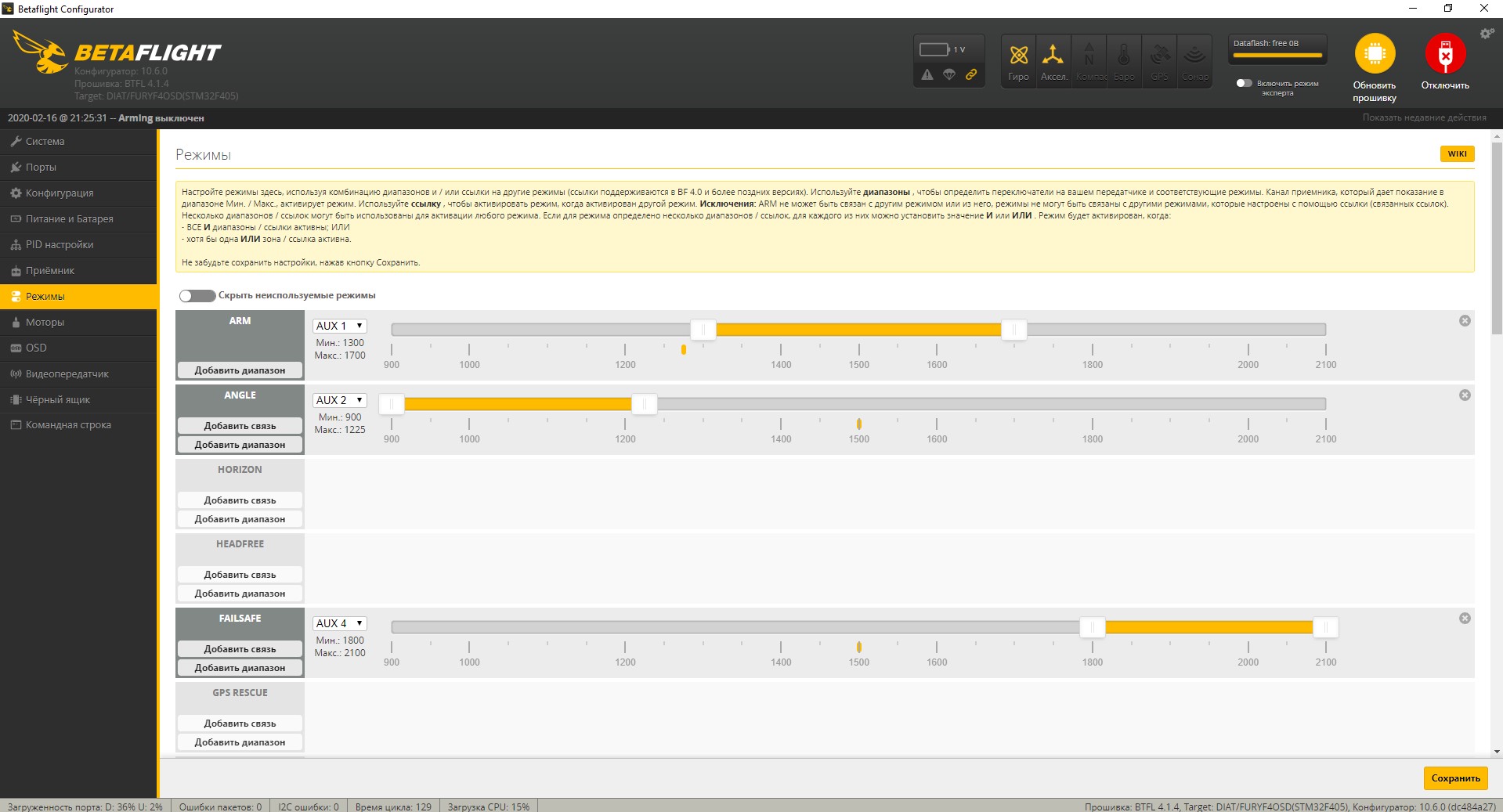
Здесь настраиваются тумблеры на ваше усмотрение. Например, заармить дрон настроено на тумблер 1, а режимы (стабилизация и АКРО) на 2 тумблер. Таким образом, когда включается тумблер 1, сразу включается режим стабилизации:

Жмем «Сохранить«.
Вкладка Моторы
Здесь нам нужно проверить направление моторов. Переключаем тумблер 1 и по очереди поднимаем ползунок каждого двигателя, перед этим подключив аккумулятор и обязательно сняв пропеллеры. Если все хорошо и каждый мотор крутится в свою сторону (как показано на схеме выше), то приступаем к калибровке, если нет, то заходим в BLHeli и меняем направление на Reversed.
При использовании протоколов DSHOT, калибровку делать нет необходимости. Но если вы используете, например, Multishot, то калибровка нужна.
Калибровка:
- Переключаем тумблер 1;
- Отключаем аккумулятор;
- Поднимаем ползунок 2 на самый верх;
- Подключаем аккумулятор — регуляторы пропищат;
- Резко переводим ползунок в нижнее положение — регуляторы снова пропищат;
- Переподключаем аккумулятор.
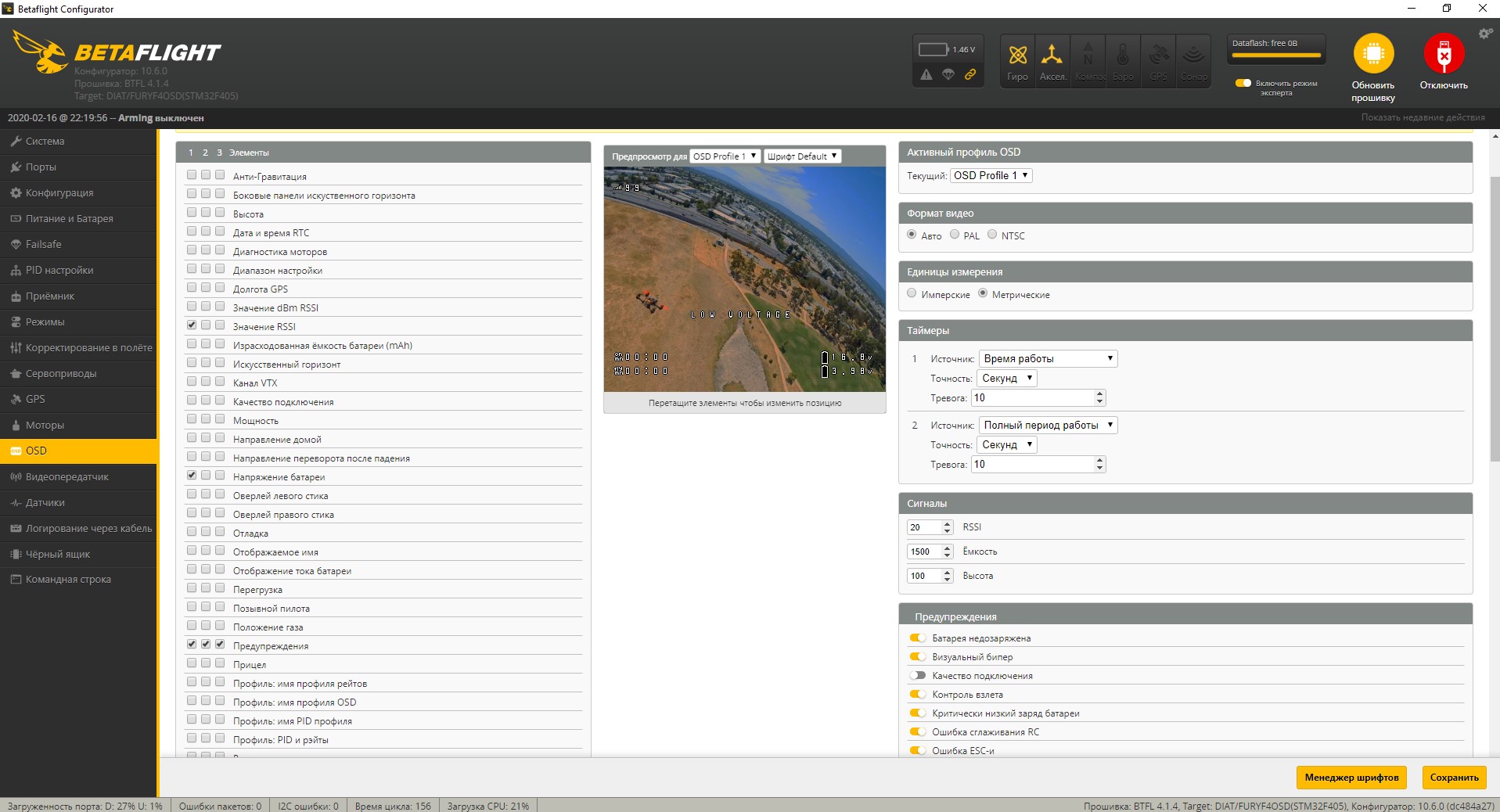
Вкладка OSD
Для этой сборки настроены такие параметры OSD, но вы можете устанавливать любые:
Вкладка Командная строка (CLI)
Здесь сохраняем все наши настройки командой DUMP:
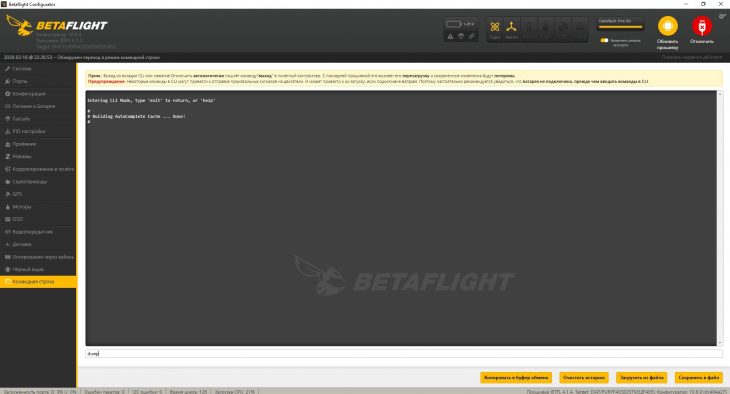
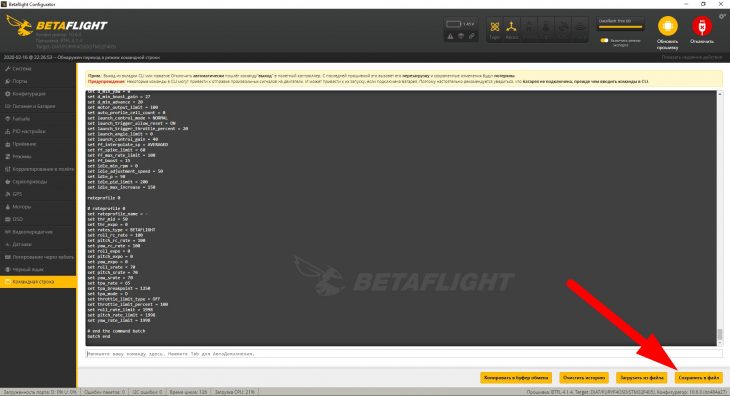
И сохраняем в файл.
Подробнее о командной строке: CLI: командная строка Betaflight — как сделать бекап и посмотреть настройки, а также команды
Вот и все, ваш квадрокоптер готов к полету!
Фотографии
Таблица компонентов и примерная цена
Дешевле и проще заказать компоненты на Banggood. Все пришло быстро и в срок, без брака.
| Компонент | Название | Ссылка | Цена ~ |
| Рама |
Martian 215 |
Banggood | Aliexpress | 21.83$ |
| Полетный контроллер с регуляторами оборотов 4 в 1 | MAMBA F405 MK2 | Banggood | Aliexpress | 42$ |
| Моторы |
Racerstar 2306 BR2306S Fire Edition 2400KV |
Banggood | Aliexpress | 38$/комплект |
| Пропеллеры |
HQProp 5045 |
Banggood | Aliexpress | 3$ |
| FPV камера |
Caddx Tarsier 4K |
Banggood | Aliexpress | 90$ |
| Антенна |
Foxeer 5.8G Lollipop (RP-SMA Male) |
Banggood | Aliexpress | 20$/2 шт. |
| Приемник | Frsky XM+ Plus Micro | Banggood | Aliexpress | 13$ |
| FPV шлем или очки | — | FPV шлем и FPV очки, что это и как работает | |
| Зарядное устройство | — | Как выбрать зарядное устройство LiPo для квадрокоптера? Советы и примеры | |
| Аккумуляторы | AHTECH Infinity 4S 85C (в карточке товара нужно выбрать Цвет: 1500mah 4S 85C) | Banggood | Aliexpress | 25$ |
| Видеопередатчик |
Eachine TS5828L (можно использовать любой другой) |
Banggood | Aliexpress
Альтернатива, с антенной SMA на Banggood и/или RP-SMA на Ali: |
7-8$ |
| Набор винтов и гаек | Здесь следует выбирать наборы М2! Другие не подойдут. | Banggood | Aliexpress | 7-10$ |
| Переходник с маленькой камеры, на большую |
Fixed Mount TPU |
Banggood | Aliexpress Ссылка на 3D-модель: ТЫК |
3$ |
| Аппаратура управления | — | Аппаратура управления квадрокоптером, какая бывает и как выбрать | |
| Паяльник | — | Banggood | Aliexpress | 6.53$ |
| Ключ для закручивания гаек пропеллеров | — | Banggood | Aliexpress | 3.89$ |
| Припой 63/37 | Kaina | Banggood | Aliexpress | 2.95$ |
| Оплетка для проводов | — | Aliexpress | 1.59$ |
| Пищалка | — | Banggood | Aliexpress | 3$/10 шт. |
| Термоусадка | — | Banggood | Aliexpress | 0.15$/1 метр |
Заключение

Сергей
Пилот как съемочного, так и гоночного квадрокоптеров
Задать вопрос
Такой квадрокоптер получился по итогу сборки. К нему планируется прикрутить еще и GPS для включения функции Возврат домой — такая функция появилась в последней версии Betaflight (Filesafe).
Главной целью сборки было, конечно же, прикрутить FPV камеру Caddx Tarsier 4K, ради которой все и затевалось.
Качество видео записывающей камеры отличное. Качество FPV камеры тоже на высоком уровне, также, удивило то, какая хорошая картинка в сумерки, будто с ночным зрением летаешь.
Видео с полетов будет позже.
Если у вас остались вопросы по сборке fpv квадрокоптера: задавайте, с радостью ответим!
Время на прочтение
8 мин
Количество просмотров 86K
Пролог
Сейчас в интернете можно найти несколько полезных туториалов (все ссылки в конце статьи) на тему того, как самому собрать дрон на 250 раме. Но, собирая свой первый квадрик по этим статьям, я столкнулся с проблемами, которые не были никак освещены. А именно: я не нашел полный лист деталей и дополнительного оборудования, который мне нужен, цену полной сборки, а также некоторые практические и теоретические вопросы. Именно поэтому было решено сделать данную статью в виде обобщения моего личного опыта и опыта других людей, дабы помочь новичкам (таким как я) как можно продуктивнее построить свой первый дрон.
1 часть будет посвящена подбору деталей, оборудования, сборке и подключению всех узлов коптера. Программная сторона будет рассмотрена во 2 части.
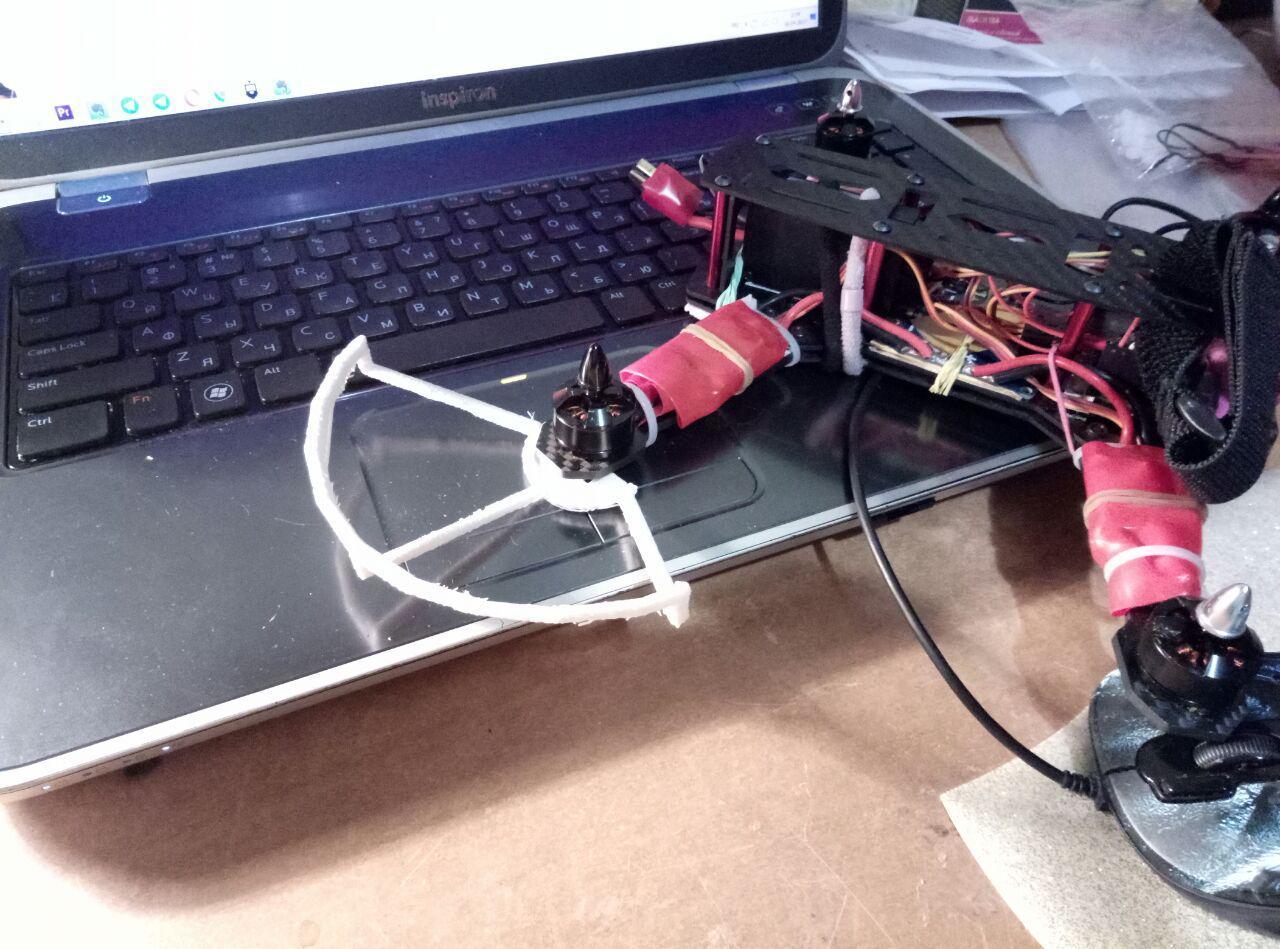
Сразу отчет о том, что у меня получилось:
На видео заметно, что во время полета у дрона пропали ножки, но об этом позже
Список часто задаваемых вопросов:
В: Не проще ли купить готовый квадрик и летать?
О: Проще, только если вы не собираетесь продолжать улучшать свой дрон и строить другие. То есть хотите просто полетать, а не ломать себе голову и тратить дорогое время. Магазинный дрон в любом случае легче в освоении и проще в эксплуатации. В качестве альтернативы могу предложить MJX Bugs 3. Обзор на него здесь. Цена от ~120$.
В: Нужно ли паять?
О: Да, нужно!
В: Собрать квадрик самому дешевле, чем купить в магазине?
О: Нет! Считаю это заблуждением. Если вы новичок, а раз вы читаете эту статью, скорее всего так оно и есть, то кроме деталей для квадрокоптера вам понадобится еще уйма всего. Прилагаю список ниже.
Список к покупке:
Для того, чтобы не заморачиваться с подбором основных компонентов, вижу отличную альтернативу в покупке готового набора. Не теряя времени на подбор деталей, вы получите все, что вам нужно.

Все, что вы получите в комплекте. На картинке не показаны соединительные провода от контроллера к передатчику
1) Набор деталей с Aliexpress ~4000 руб.
1.1 Рама
1.2 Бесколлекторные моторы Marspower MX1806 2280KV на 12 А
1.3 Регуляторы Emax Simon K Series на 12A
1.4 Распределительная плата и провода питания
1.5 Полетный контроллер CC3D (мой выбор NAZE 32 FULL. Его я покупал отдельно, так как CC3D из комплекта сгорел. Разницы в настройке CC3D и NAZE 32 FULL нет. Вот интересная статья о полетных контроллерах).
1.6 Соединительные провода от контроллера к передатчику
1.7 4 пропеллера (2 левых, 2 правых)
1.8 Винты и шестигранники. Не знаю как у остальных, а мне положили аж 4 одинаковых шестигранника для винтиков, которыми крепятся моторы, но ни одного для закручивания винтов на раме
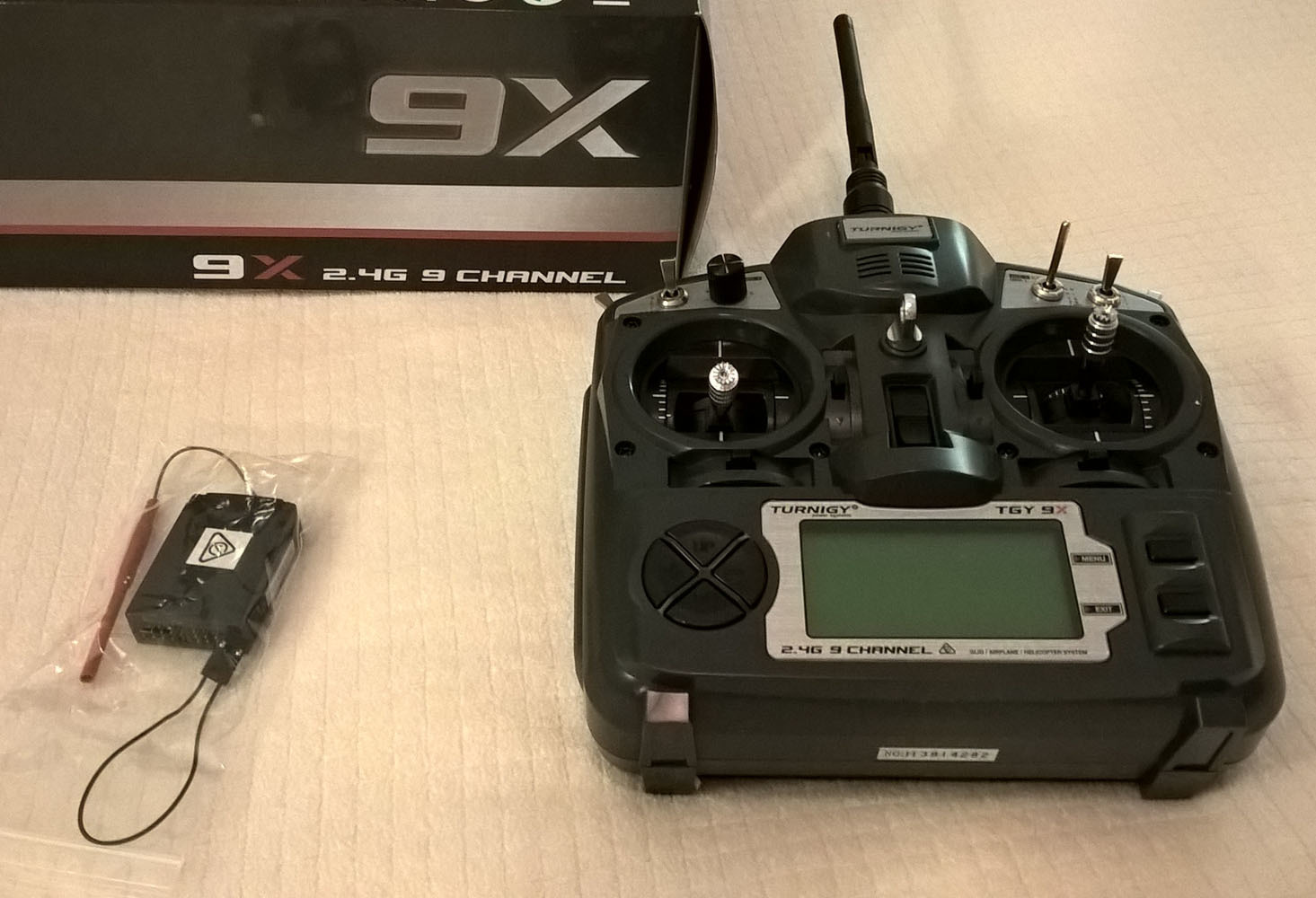
Приемник и передатчик Turnigy 9X
2) Пульт радиоуправления Turnigy 9X 9Ch + приемник (все в одном коплекте) ~3400 руб.
В: Почему именно эта модель?
О: Во-первых, 9 независимых каналов, то есть огромный запас возможностей на будущее. Во-вторых, огромное количество информации по настройке и прошивке. Очень популярная модель среди моделистов. Но, если вы настроены ОЧЕНЬ серьезно, то советую Turnigy 9XR или 9XR-Pro.
В: Можно ли взять модель подешевле?
О: Да, это полностью ваш выбор. Не советую брать аппаратуру меньше, чем с 6 каналами, так как кроме управления необходимо переключать полетные режимы. Кстати, есть готовые наборы уже с аппаратурой, например, такой.
3) Как минимум 2 дополнительных комплекта пропеллеров (в комплекте 4 шт: 2 левых, 2 правых) ~0-100 руб.
Пропеллеры действительно расходный материал при первых полетах, так что лучше взять с запасом. Как ни странно, но с Китая заказывать дороже, да и ждать долго. Максимальный диаметр 5 дюймов. Я купил здесь.
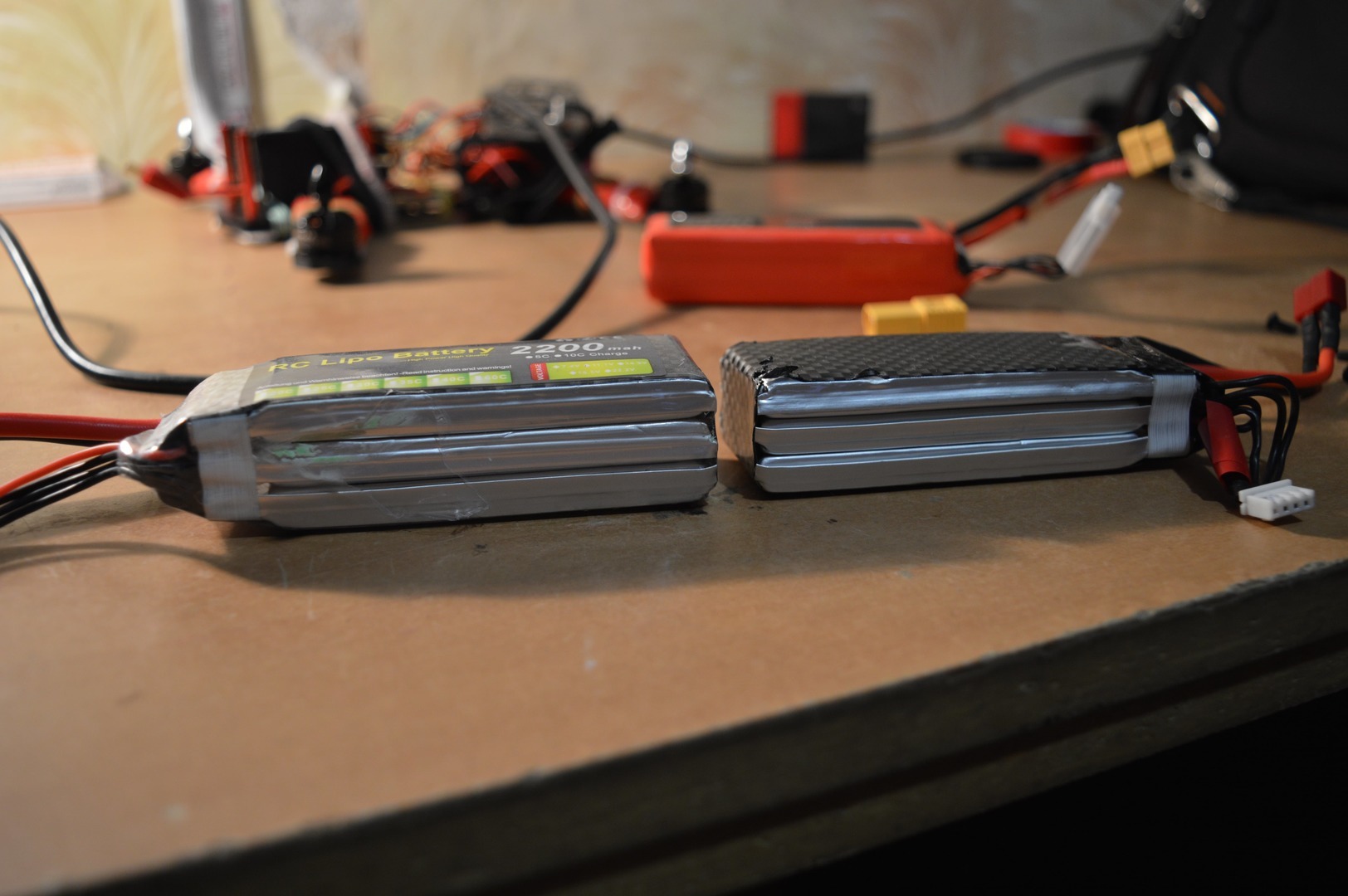
Аккумуляторы с Aliexpress. Оба вышли из строя. У левого отказала вторая банка, у правого — третья.
Слева: аккумулятор для пульта радиоуправления с JR разъемом (черная головка). Справа: аккумулятор для питания квадрокоптера
4) Как минимум 1 аккумулятор для питания квадрокоптера, а лучше 2 ~1239-2478 руб.
В: Зачем два? Тебе одного мало?
О: Да, мало! Аккумулятора хватает примерно на 10-12 мин полета, а заряжается он 1-2 ч, поэтому, чтобы, войдя в кураж, не идти подзаряжаться, а летать дальше, советую взять пару. Обратите внимание на маркировку аккумуляторов, прочитать про это можно здесь.
Крайне не советую приобретать аккумуляторы из Китая: оба аккумулятора, заказанные мной, вышли из строя, то есть перестали выдавать требуемое напряжение (отказало по одной банке). Да, возможно, дело случая, но с другими аккумуляторами таких проблем не было, да и экономия в 150 руб. не стоит риска.

Turnigy 9X c аккумулятором. Сидит очень плотно, крышка закрывается
5) Аккумулятор для пульта радиоуправления. ~1199 руб.
В: Я же уже купил два. Нужен еще один?
О: Так точно. Для передатчика нужен специальный аккумулятор с низким током разряда.
В стандартном наборе пульт идет с креплением для батареек, что не приемлемо при частых вылетах. Объясняю: напряжение батарейки теряют быстро, с зарядкой проблема, а стоимость велика. Также стоит обратить внимание на наличие у аккумулятора JR разъема. В таком случае вам ничего не нужно будет перепаивать. Кстати, если вы собрались покупать другой аккумулятор (не такой как у меня), не поленитесь взять пульт с собой, чтобы примерить его на месте. Мой влезает в стандартный отсек с трудом, но крышка все-таки закрывается.
6) Зарядное устройство для аккумуляторов iMAX B6 ~1230 руб.
iMAX B6 позволяет зарядить банки аккумулятора равномерно при помощи балансировочного разъема. Самая популярная зарядка.
В: Как этим пользоваться? Какие режимы выбрать?
О: Ответы здесь
7) Переходник с XT-60 на T-коннектор ~140 руб.
Если берете такие же аккумуляторы для питания квадрокоптера, как и у меня, вам необходим переходник для зарядки, так как в стандартном наборе iMAX B6 его нет.
 Индикатор напряжения для 1-8 баночного Li-Po аккумулятора ~230 руб.
Индикатор напряжения для 1-8 баночного Li-Po аккумулятора ~230 руб.
Данная штука покажет напряжение по банкам, а также уведомит вас, когда заряд опустится ниже заданного вами уровня, дабы коптер не упал с высоты и батарея жила долго. Видео о том, как пользоваться.
9) Застежка Tarrot 300 мм для крепления аккумулятора (2 шт. в комплекте). Эластичный ремешок 22*200мм для крепления камеры. ~90 + 50 руб.
Застежки и ремешки сугубо личное дело. То, каким способом будет закреплен аккумулятор и камера, ограничивает лишь ваша фантазия. Обратите внимание на размеры ремешков.

4 винта на 16 мм вместо 8 мм
10) Мелочовка ~ 300 руб.
10.1 20 шайбочек под винты на раме и винты, удерживающие моторы. Дело в том, что шляпки у винтов маленькие и при натяге они портят раму
10.2 4 винта на 16 мм вместо 8 мм. С помощью таких винтов удалось закрепить еще и ножки, распечатанные на 3D принтере (видео с печати). Стандартные ножки сломались после одного жесткого приземления, нашел альтернативу в напечатанных. Вообще, высокие ножки полезная вещь при взлете с земли или мокрой поверхности
10.3 Термоусадка. Пригодится, когда будете прятать регуляторы
10.4 Пластиковые хомуты 10 см (9 шт.) Для фиксации регуляторов
10.5 Двухсторонний скотч, изолента
10.6 Винт и гайка под камеру. Ситуция подобная ремешкам — полностью ваша фантазия
10.7 Резинки. Пригодятся для фиксации приемника, контроллера, распределительной платы и регуляторов
Защита для пропеллеров, напечатанная на 3D принтере
10.8 Дополнительно: защита для пропеллеров. Печатал ее тоже на 3D принтере. Пригодилась только один раз, когда делал пробный взлет в комнате. После того, как врезался в шкаф, защита разлетелась. Больше ее не использую. Отверстия на защите, кстати, не совпадают с отверстиями на раме. Необходимо либо проделывать самому, либо дорабатывать на компьютере модель.
Всю мелочовку покупал тут1 и тут2.
10) Паяльник само-собой.
Общая стоимость ~11878 — 13217 руб.
Если вы удивлены списком, то стоит заметить, что большая часть всего, что вы купите, послужит вам еще ни один раз.
Также хочу отметить, что цены постоянно меняются, поэтому гарантировать минимальную стоимость по ссылкам я не могу. Уверен, что можно найти дешевле. Я лишь поделился источниками один в один совпадающими с моими.
Сборка
Сборка рамы
Есть вероятность, что комплект деталей вам придет без инструкции по сборке рамы. Так было у меня. Если так и произошло, то собираем по картинке или видео. На данной стадии не стоит затягивать все винты в «боевой режим», возможно, придется разобрать раму еще не раз. Верхнюю часть на данном этапе прикручивать вообще не стоит, без нее работать с внутренностями коптера удобнее. Также не стоит забывать про шайбочки, о которых я писал выше.


Не забываем про шайбы. У вас конечно же белой пластины нет — это те самые остатки от 3D напечатанных ножек
Установка моторов
Очень простая операция, если помнить про направления вращения двигателей. Определитесь, где у вас будет перед. Моторы с черной гайкой, вращающиеся по часовой стрелке, ставим на переднее левое и заднее правое места.

Обратите внимание на расположение двигателей

Крепление двигателей
Пайка
Пайка распределительной платы
Итак, вы уже примерились и решили, как у вас все будет установлено. Время паять. При пайке платы самое главное соблюдать полярность! На какие места паять провода не важно, все зависит от того, как вы собираетесь установить плату.
Припаиваем регуляторы и силовые провода. Соблюдаем полярность. (Мой вариант)
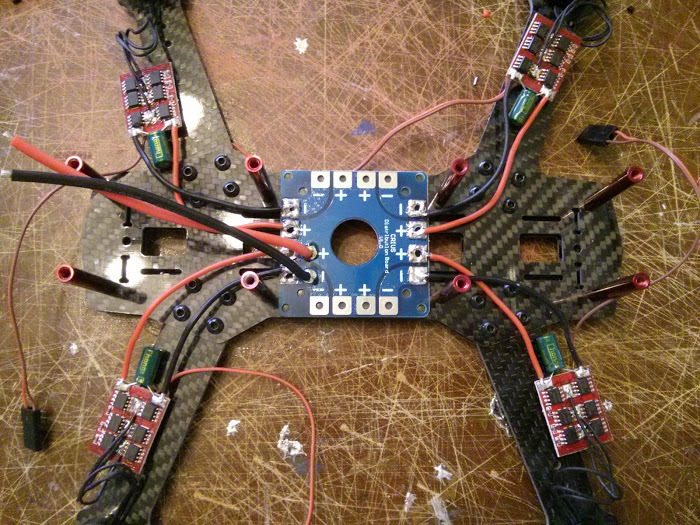
Припаиваем регуляторы и силовые провода. Соблюдаем полярность. (Другой вариант)
Припаиваем регуляторы к моторам
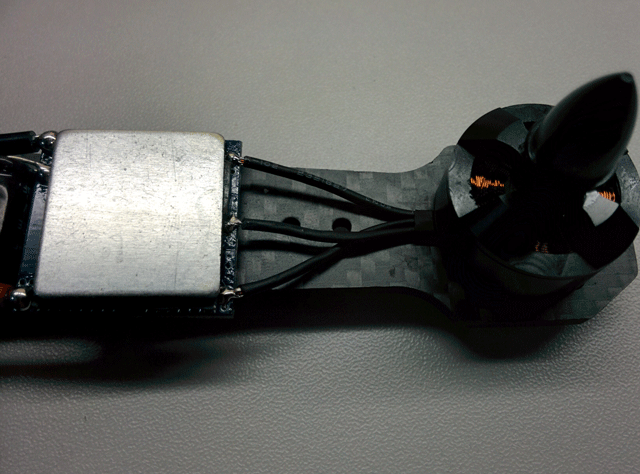
Первым делом снимаем с регуляторов стандартную красную теромоусадку. Для того, чтобы моторы вращались в нужную нам сторону, регуляторы к моторам следует припаять вот так:
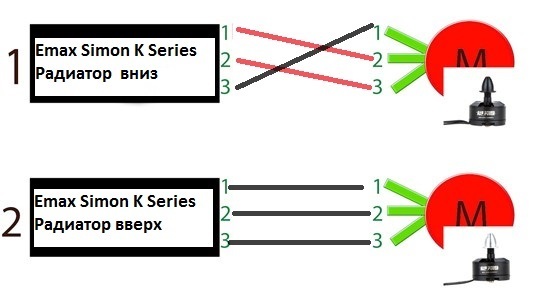
Подключение регуляторов к моторам
Думаю, что у вас возник вопрос: куда деть длинные провода от регуляторов. Их можно отпаять и убрать совсем, а можно обрезать под нужную длину. Второй способ для начинающих предпочтительнее, так как меньше шансов перегреть регулятор при пайке.
Полностью отпаянные штатные провода регулятора. Так делать не советую, лучше просто укоротить провода (не обращайте внимание на расположение проводов, картинка взята, чтобы показать другое. Правильная схема сверху)
Припаиваем T-коннектор. Полярность важна!
Крепим плату питания, регуляторы оборотов
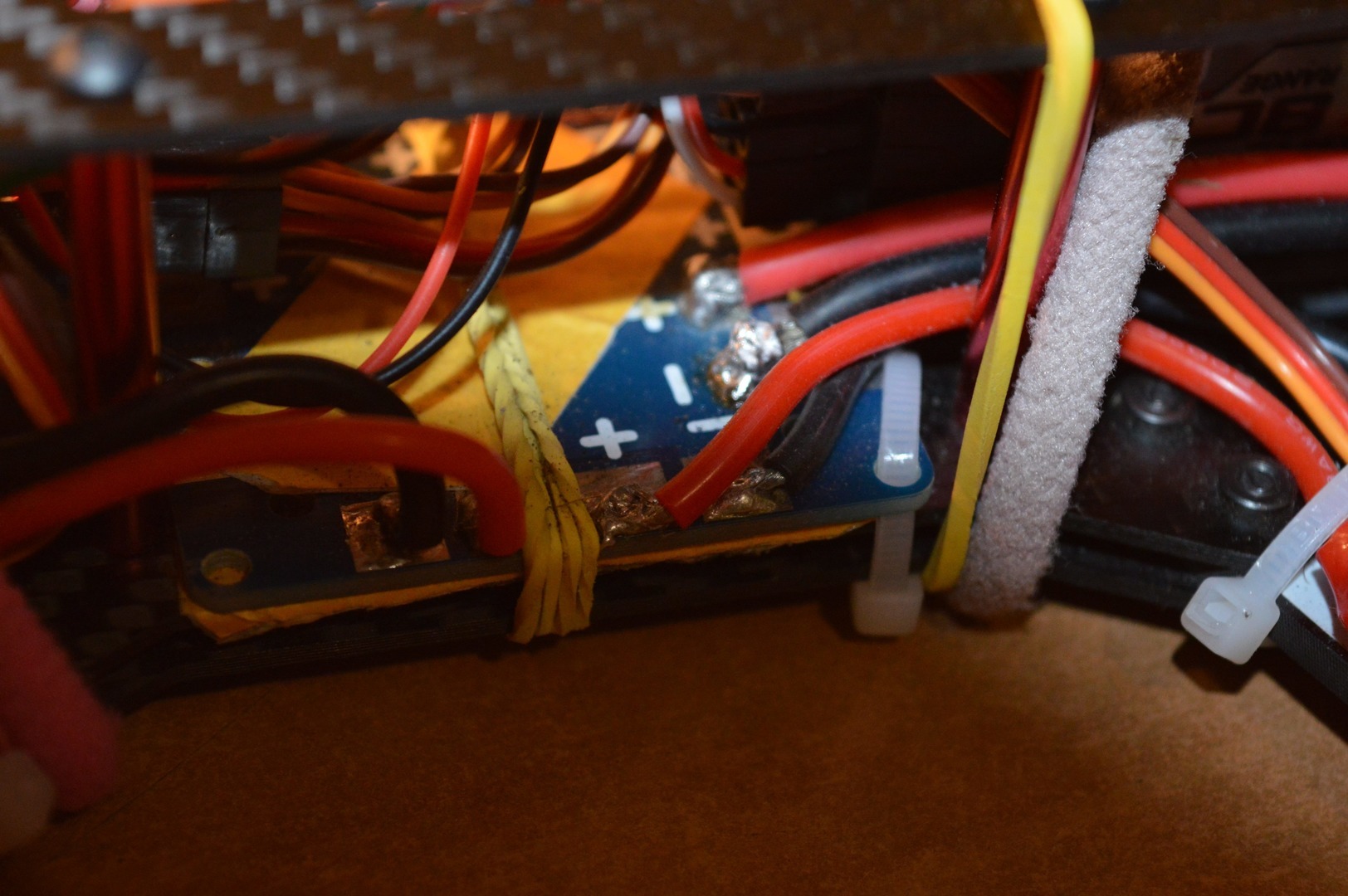
Время крепить. Помните, что рама коптера проводит ток, поэтому плата должна быть изолирована от нее. Я посадил ее на два слоя двухстороннего скотча, с одного края притянул хомутом, а после закрепил резинкой.
Крепим плату. Два слоя двухстороннего скотча + хомут + резинка
Регуляторы оборотов я спрятал в термоусадку, посадил на двухсторонний скотч, затянул хомутами и для уверенности затянул резинкой. Выглядит более чем надежно

Крепим регуляторы. Термоусадка + двухсторонний скотч + хомуты + резинка
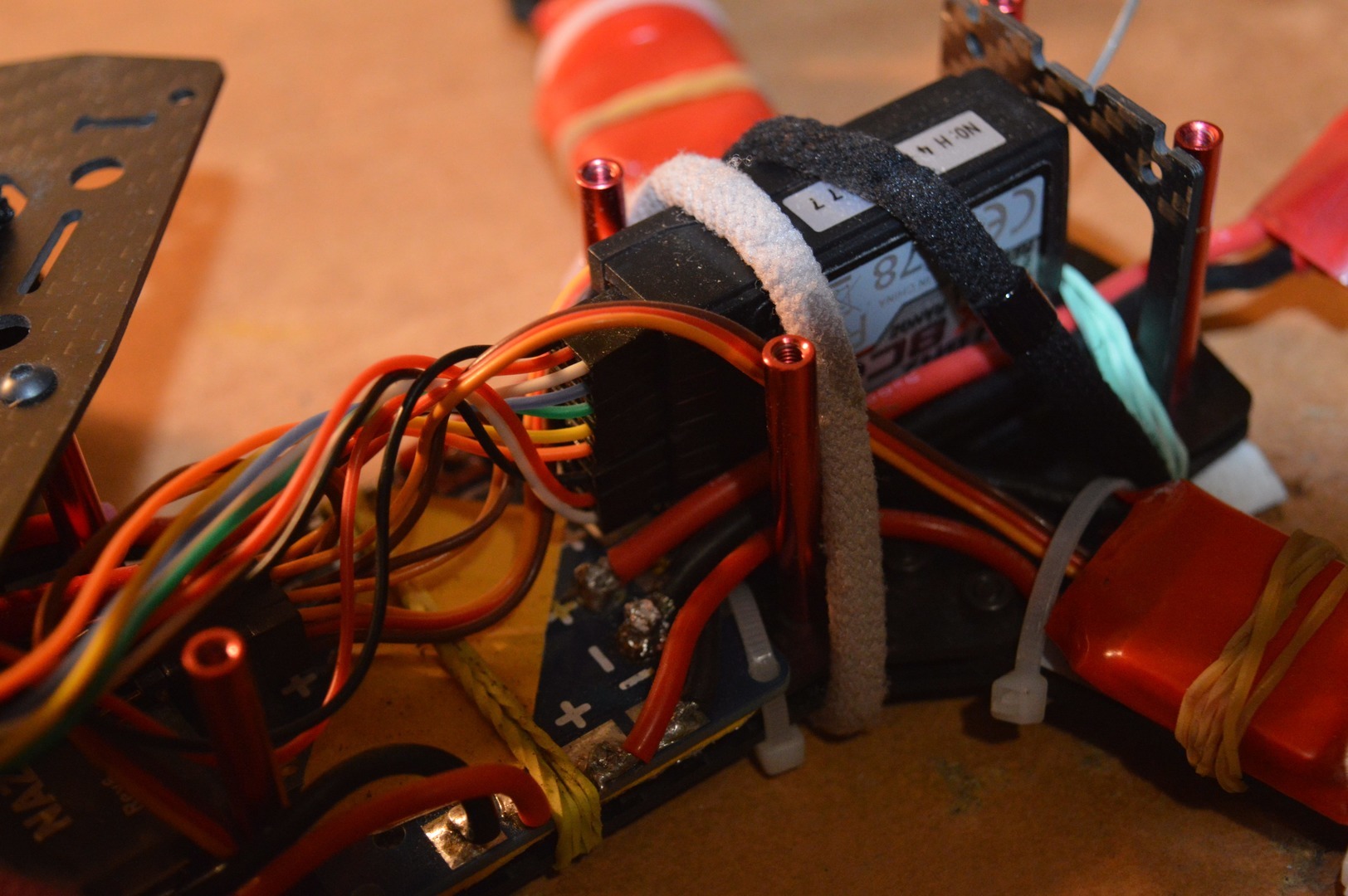
Крепим полетный контроллер, приемник
В дело опять вступают двухсторонний скотч и резинки. Опять же, чем жестче вы закрепит, тем лучше.
У меня это сделано следующим образом:
Крепим полетный контроллер (1). Трава осталась после краша
Крепим полетный контроллер (2)
Крепим приемник. Торцом он тоже сидит на двухстороннем скотче
Соединяем все проводами
Регуляторы к полетному контроллеру
От каждого из регуляторов у нас идет по 3 провода. Сделать нужно следующее: на трех из четырех регуляторах нужно вытащить из разъема красный провод. Подсоединять провода к контроллеру нужно в определенном порядке, об этом будет рассказано в следующей части.
На трех из четырех регуляторах нужно вытащить из разъема красный провод
Приемник к полетному контроллеру
А вот здесь порядок подсоединения проводов к каждому каналу не важен. Нужно лишь правильно подключить провод питания — белый провод ближе к стороне с наклейкой.
Соединяем приемник с полетным контроллером. Провод питания должен быть расположен белым ближе к стороне с наклейкой
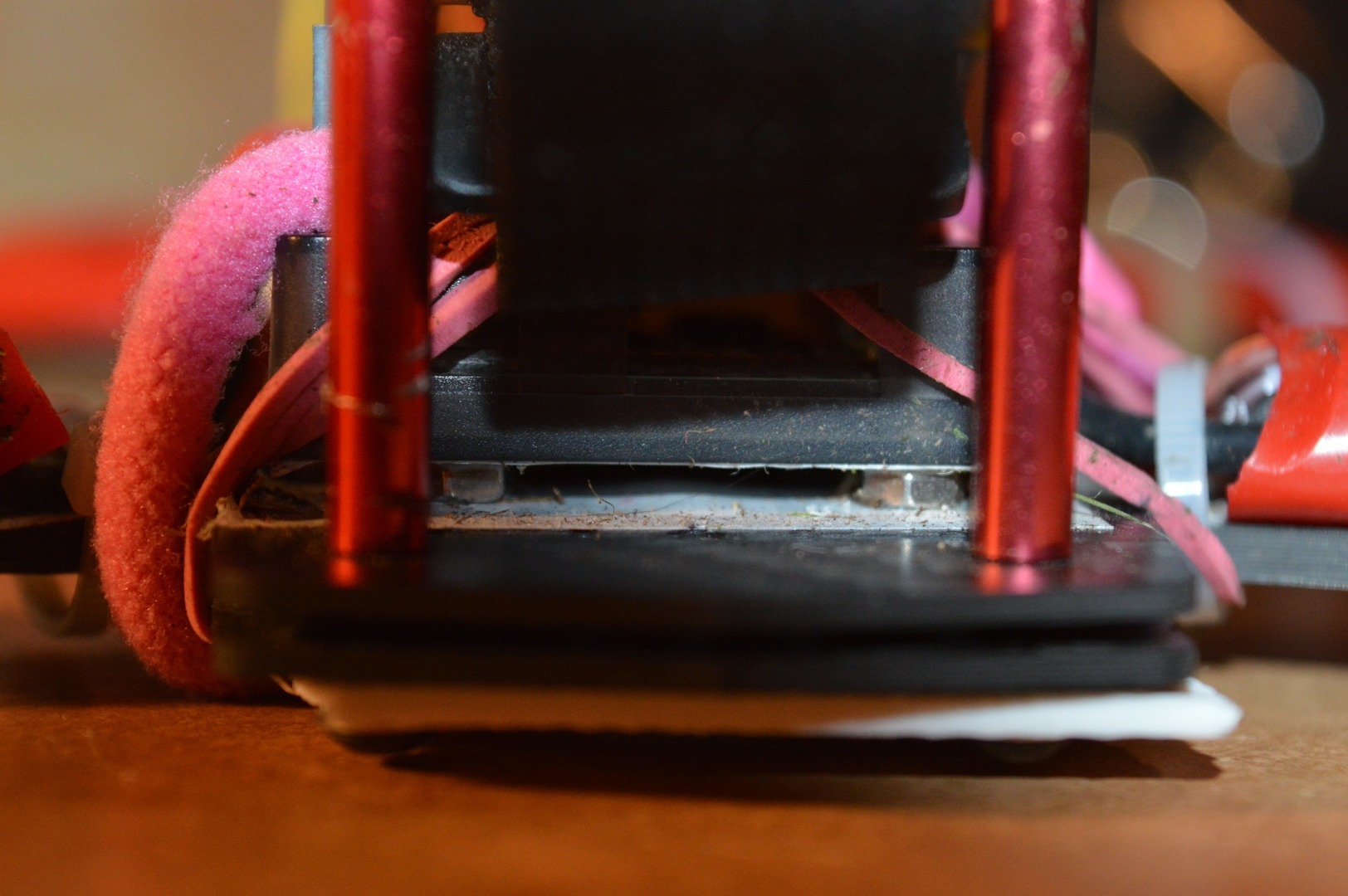
Прикручиваем верхнюю часть рамы, смотрим, что получилось
Я также добавил «крепление для камеры».
«Крепление для камеры»
Итого:


О падениях и, что делать пока ждем посылку
Будьте готовы к тому, что сначала будут падения. А это: сломанные пропеллеры, ножки и камера в моем случае.

Сломанные ножки

Сломанная камера. Кстати, советую дополнительно заклеивать скотчем разъем с флешкой, есть шанс потери при падении
А вот видео с моего самого первого полета:
Чтобы такого не происходило, советую прикупить маленький квадрик для комнатных полетов. За время ожидания скилл управления поднимется очень сильно. Мой выбор пал на Syma X12S. Цена вопроса ~1445 руб.
Обещанные ссылки на статьи
Статья 1 | Статья 2 | Статья 3 | Статья 4 | Статья 5 | Статья 6 | Статья 7
Рад, если кому-то помог! Также открыт для ваших замечаний и комментариев.
2 часть скоро.
Квадрокоптер своими руками

Наверное, не стоит лишний раз говорить о том, насколько популярны сейчас квадрокоптеры. И вы, скорее всего, знаете, сколько они стоят, и уже забросили думать об этом. В нашей статье вы узнаете, как сделать квадрокоптер своими руками в домашних условиях. Сразу предупреждаем, что дело это ответственное и непростое, но по итогу у вас будет бесценный опыт и заветный девайс по смешной цене.
Есть несколько способов собрать квадрокоптер своими силами:
- Комплект «Всё включено».
 Идеально подходит для тех, кто хочет сэкономить на покупке готового изделия, но также не хочет разбираться во всех нюансах его сборки. Это посылка с деталями, предварительно настроенными производителем. Вам останется лишь прочесть инструкцию и собрать по ней квадрокоптер.
Идеально подходит для тех, кто хочет сэкономить на покупке готового изделия, но также не хочет разбираться во всех нюансах его сборки. Это посылка с деталями, предварительно настроенными производителем. Вам останется лишь прочесть инструкцию и собрать по ней квадрокоптер. - Комплект «Almost Ready to Fly».
 «Почти готовый к полёту» стоит дешевле, однако процесс сборки заметно сложнее. Комплект может быть неполным (в соответствии цена-качество), также вам придётся настраивать изделие самим, что сумеет далеко не каждый. Но если вы уже имеете некий опыт в этой сфере – то стоит попробовать.
«Почти готовый к полёту» стоит дешевле, однако процесс сборки заметно сложнее. Комплект может быть неполным (в соответствии цена-качество), также вам придётся настраивать изделие самим, что сумеет далеко не каждый. Но если вы уже имеете некий опыт в этой сфере – то стоит попробовать. - Сделать квадрокоптер самим.
 Подойдёт далеко не всем. Но если у вас есть опыт, пусть и небольшой – дерзайте. К тому же, это станет вашим поводом для гордости – квадрокоптер, созданный собственными руками. Сложность состоит в том, что придётся подобрать, настроить и подогнать самостоятельно.
Подойдёт далеко не всем. Но если у вас есть опыт, пусть и небольшой – дерзайте. К тому же, это станет вашим поводом для гордости – квадрокоптер, созданный собственными руками. Сложность состоит в том, что придётся подобрать, настроить и подогнать самостоятельно. - Использовать подручные материалы. Не менее сложно, но реально. Детали с aliexpress, подручная электроника — никто не говорил, что будет легко. С другой стороны, всё нужное, включая схемы и чертежи, легко находится в интернете.
 Идеально подходит для тех, кто хочет сэкономить на покупке готового изделия, но также не хочет разбираться во всех нюансах его сборки. Это посылка с деталями, предварительно настроенными производителем. Вам останется лишь прочесть инструкцию и собрать по ней квадрокоптер.
Идеально подходит для тех, кто хочет сэкономить на покупке готового изделия, но также не хочет разбираться во всех нюансах его сборки. Это посылка с деталями, предварительно настроенными производителем. Вам останется лишь прочесть инструкцию и собрать по ней квадрокоптер. «Почти готовый к полёту» стоит дешевле, однако процесс сборки заметно сложнее. Комплект может быть неполным (в соответствии цена-качество), также вам придётся настраивать изделие самим, что сумеет далеко не каждый. Но если вы уже имеете некий опыт в этой сфере – то стоит попробовать.
«Почти готовый к полёту» стоит дешевле, однако процесс сборки заметно сложнее. Комплект может быть неполным (в соответствии цена-качество), также вам придётся настраивать изделие самим, что сумеет далеко не каждый. Но если вы уже имеете некий опыт в этой сфере – то стоит попробовать. Подойдёт далеко не всем. Но если у вас есть опыт, пусть и небольшой – дерзайте. К тому же, это станет вашим поводом для гордости – квадрокоптер, созданный собственными руками. Сложность состоит в том, что придётся подобрать, настроить и подогнать самостоятельно.
Подойдёт далеко не всем. Но если у вас есть опыт, пусть и небольшой – дерзайте. К тому же, это станет вашим поводом для гордости – квадрокоптер, созданный собственными руками. Сложность состоит в том, что придётся подобрать, настроить и подогнать самостоятельно.
Как собрать квадрокоптер своими руками
Предупреждаем, что инструкция обобщена и что могут быть различия в паре моментов. Мы расскажем основное по поводу сборки и выбора деталей.
Какие нужны детали
- Рама и её составляющие. Главное в коптере – несущая часть. Если рама будет легче, то меньше будет уходить питания. Но учтите — лёгкие рамы стоят дороже. Прочность не так важна, если вы не планируете ставить на коптер камеру потяжелее. Рамы бывают трёх типов: четырёхлучевые, шестилучевые и восьмилучевые (по одному мотору на каждый луч).

Особенности выбора комплектующих
- Моторы. Китайские интернет-магазины обычно хитрят и завышают характеристики. Поэтому для надёжности стоит купить моторы мощнее. Также это даст возможность поднимать более тяжёлую камеру. Также существует две разновидности моторов для квадрокоптера — это коллекторные и бесколлекторные

- Пропеллеры. Их цена зависит от цели вашего коптера. Если в ваши планы не входят более сложные «полёты» — пластиковых пропеллеров будет достаточно. Если же планируете аэрофотосъёмку – придётся брать композитные материалы. Чем дороже пропеллеры, тем они крепче и меньше уйдёт времени на балансировку.

- Пульт, приёмник сигнала. Пульт следует брать вместе с приёмником. В таком случае приёмник будет принимать сигнал, посылаемый с пульта. Нормальные пульты, опять-таки, стоят от тысячи рублей и выше – у них радиус действия выше. Сами же пульты могут иметь кучу ненужных переключателей, которые будут вас путать – такие экземпляры лучше не брать.

- Регуляторы оборотов и батарея. Советуем брать сразу комплект двигателей с контроллерами. Можно обойтись и без этого, но тогда настраивать мощность придётся самим. Батарею следует покупать по мощнее, особенно, если хотите ставить более тяжёлую камеру.

- Контроллер. Контроллеры бывают двух типов. Универсальный удобен тем, что работает на дронах любой сборки, этому способствуют датчики и многофункциональность. Недостатком является цена контроллера – от 17 тысяч рублей. Также его придётся настраивать через специальный софт, написанный под конкретную модель. Специализированный контроллер уже имеет необходимые настройки под конкретный тип коптера.
- Камера. Выбор камеры для коптера – дело непростое. Советуем поставить камеру типа GoPro или аналоги от китайских фирм – их качество не сильно разнится. Главную роль играет вес и угол обзора, о последнем расскажем чуть ниже. Чем массивней камера, тем сложнее будет её от центровать. Вы можете рассчитать положение камеры по формуле L= 2 * tg (A /2) х D , (L – область обзора, A – угол, D – расстояние до пропеллеров).



Аналоги камеры GoPro
Экшн-камера Xiaomi Yi

Цена на AliExpress: US $49.99 — 109.99
Технические характеристики:
- Сенсор: CMOS 1/2,3″ 16 мегапикселей;
- Объектив: f/2.8, угол обзора 155 градусов;
- Видео: 1920×1080, 60fps;
- Фото: 4608×3456;
- Вес: 72 грамма;
- Time Lapse: есть;
- Встроенный экран: нет;
- Память: карта памяти microSD.
SJCAM SJ5000X 2K

Цена на AliExpress: $126.58
Технические характеристики:
- Сенсор: CMOS 12 мегапикселей;
- Объектив: f/2.8, угол обзора 170 градусов;
- Видео: 2560×1440, 30fps;
- Фото: 4032×3024;
- Вес: 74 грамма;
- Time Lapse: есть;
- Встроенный экран: есть;
- Память: карта памяти microSD.
О деталях из Китая
Конечно, не стоит недооценивать китайских производителей, но и расхваливать тоже не нужно. Завышенная характеристика их товаров – обычное дело. Брать можно, но только не дешёвые детали, иначе придётся делать всё заново.
Инструкция по сборке
Наверняка, вы прочитали эту статью и взяли раму с платой распределения. Но если вы это не сделали – не беда, просто подключите провода к модулю управления.
Возьмём, к примеру, коптер, собранный из таких комплектующих:
- Основа (каркас) – Diatone Q450 Quad 450 V3 PCB Quadcopter Frame Kit 450
- 4 мотора DYS D2822-14 1450KV Brushless Motor.
- Регулятор оборотов DYS 30A 2-4S Brushless Speed Controller ESC Simonk Firmware
- Пропеллеры DYS E-Prop 8×6 8060 SF ABS Slow Fly Propeller Blade For RC Airplane
- Модуль управления 1.5 kk21evo
- АКБ, тип: литий-полимер — Turnigy nano-tech 2200mah 4S ~90C Lipo Pack
- Зарядное устройство Hobby King Variable6S 50W 5A
- Аккумуляторный коннектор XT60 Male Plug 12AWG 10cm With Wire
- Коннекторы 20 Pairs 3.5мм Bullet Connector Banana Plug For RC Battery / Motor
- Пульт управления Spektrum DX6 V2 with AR610 Receiver (с приёмником и передатчиком)
Всё это обойдётся где-то в 20 тысяч рублей
Этапы сборки квадрокоптера
Раскладываем всё это добро по столу и приступаем.
- Приблизительно прикидываем нужную длину проводов контроллера, добавляем небольшой запас на всякий случай, и обрезаем их до необходимой длины.
- Коннекторы припаиваем к выходам регуляторов для упрощения подключения моторов.
- Припаиваем регуляторы оборотов к плате разводки.
- Припаиваем коннектор АКБ тоже к плате разводки.
- Аккуратно прикручиваем моторы на лучи дрона. При установке бережём резьбу.
- Припаиваем коннекторы двигателей, если их нет.
- Прикручиваем лучи с моторами к плате.
- Крепим регуляторы к лучам коптера. Удобней всего это делать пластмассовыми хомутами.
- Включаем провода регуляторов к движкам в случайном порядке. Если понадобится, потом изменим порядок.
- Закрепляем на корпусе модуль управления (предварительно сфотографировав тыльную сторону, потом поймёте, для чего). Крепим хоть на жвачку, но рекомендую для начала применить мягкую двухстороннюю липкую ленту.
- Подключаем регуляторы оборотов к контроллеру. В порты, отмеченные знаками «плюс»-«минус»-«пусто», как правило, подключаем белым проводом к экрану.
- Оставшейся липкой лентой закрепляем приёмник поближе к блоку управления, и подключаем необходимые каналы к соответствующим портам. Применяем документацию данного приёмника и снимок внешнего края платы, дабы понять, какая стопка проводов за что отвечает.
- Подключаем питание прибора от батареи, сквозь коннектор.
- Вы молодец! Вы собрали свой первый дрон.
Установка и настройка оборудования
Теперь вам осталось его настроить, чтобы он не разбился в первый день полёта.
- Запускаем моторы (здесь по-всякому бывает, штудируйте документацию)
- Добавляем газ и смотрим, в какую сторону крутятся пропеллеры. Они обязаны вертеться так, как написано в схеме, что прилагается к контроллеру. По-другому управление станет инвертироваться. В случае, если что-нибудь пошло не так — переворачиваем коннектор, объединяющий движок и контроллер.
- Если всё вертится верно – прикручиваем верхнюю часть рамы. Не старайтесь втолкать её на место. В случае, если та встала туго — что-то идёт не так. Ослабляем нижние винтики, впоследствии установки затягиваем всё постепенно.
- Закрепляем блок с батареями.
- Монтируем адаптеры для пропеллеров на двигатели.
- Ставим пропеллеры, беря во внимание сторону вращения моторов. Приподнятый элемент лопасти обязан глядеть в сторону вращения.
- Есть! Ваш квадрокоптер готов к первому полёту.
Мы с вами рассмотрели простой пример сборки квадрокоптера, который не требует больших затрат и усилий в плане сборки. Соответственно, если вы решите поднимать на дроне что-нибудь потяжелее (навигатор, более тяжёлые средства съёмки и т.п.) – конструкцию придётся доработать и усилить. Тем не менее, вы уже получили первый опыт сборки подобных конструкций. Дальше вам будет проще понимать принцип работы коптера и знать, как его в дальнейшем доработать.
Вам понравится:
Собираем квадрокоптер своими руками (FPV). FrogII + Mamba F405
Привет! Давно хотел написать подобную статью с максимально подробной инструкцией как собрать квадрокоптер своими руками. Но сразу скажу, что цена такого квадрокоптера выйдет около 11 тысяч рублей. Это без учета стоимости FPV шлема, аккумуляторов, радиоаппаратуры и зарядного устройства. А полный комплект обойдется вам в примерно 21000 рублей. Подробнее о стоимости квадрокоптера можно, например, почитать здесь и здесь (окончание статьи с итогами). Сборка получилась весьма интересной, шустрой и крепкой. В общем, на текущий момент это мой любимый квадрокоптер.
Краткий обзор комплектующих.
Рама — Transtec Frog Lite II (Купить можно здесь(Aliexpress)
Моторы — Aokfly DR2205 2500kv (Покупаем здесь (Aliexpress)
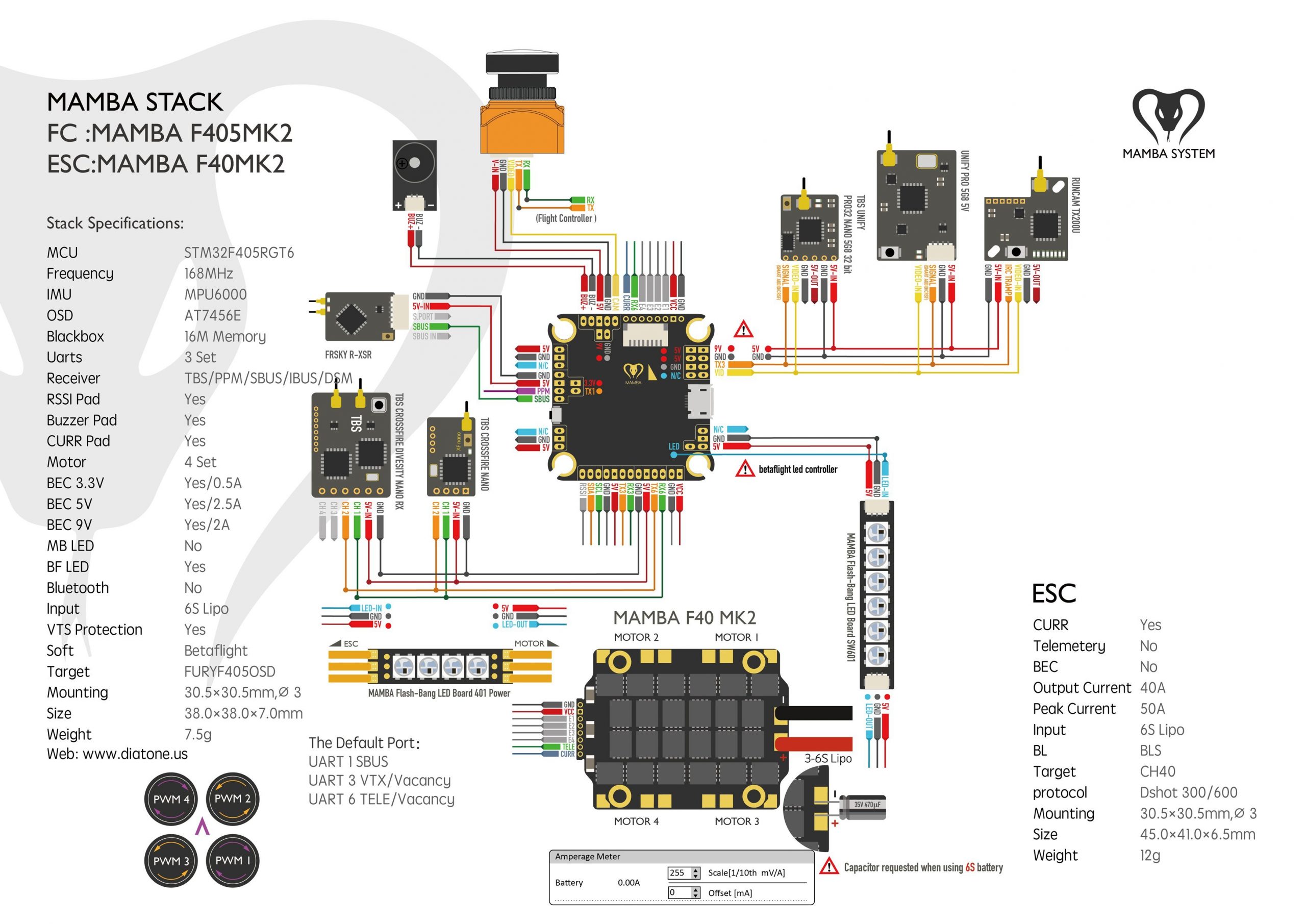
Полетный контроллер Mamba F405 mini MK2 в стэке с регулятором ESC 4-в-1 (Покупал здесь (Aliexpress)
FPV камера — Foxeer Predator 4
Видеопередатчик — Foxeer Clear/ClearTX2
Приемник радиоаппаратуры Flysky FS-IA6B, модернизированный (добавлены каналы, уменьшен размер и добавлена функция RSSI). О том, как это сделать описано в статье про RSSI. Но я сразу вам рекомендую облегчить задачу и заказать себе что-нибудь миниатюрное типа Fli14 и будет вам счастье.
Ну вот, все основное перечислил, теперь переходим к описанию сборки квадрокоптера. Вперед!!!
Сборка рамы.

Вот так выглядит рама нашего будущего квадрокоптера в разобранном виде (слева расположена карма квадрокоптера). Во-первых, вы должны зафиксировать все 4 луча квадрокоптера между двумя центральными пластинами. Сделайте это с помощью 8 винтов из комплекта. 4 самых близких винта проденьте шляпкой вниз и затяните обычной гайкой (капните немного синего фиксатора на резьбовое соединение), 2 крайних правых и два крайних левых (на рисунке это нижние и верхние) — шляпкой вверх и затяните гайками с пластмассовыми втулками. Этим гайкам фиксатор не нужен.
Установка моторов на раму.

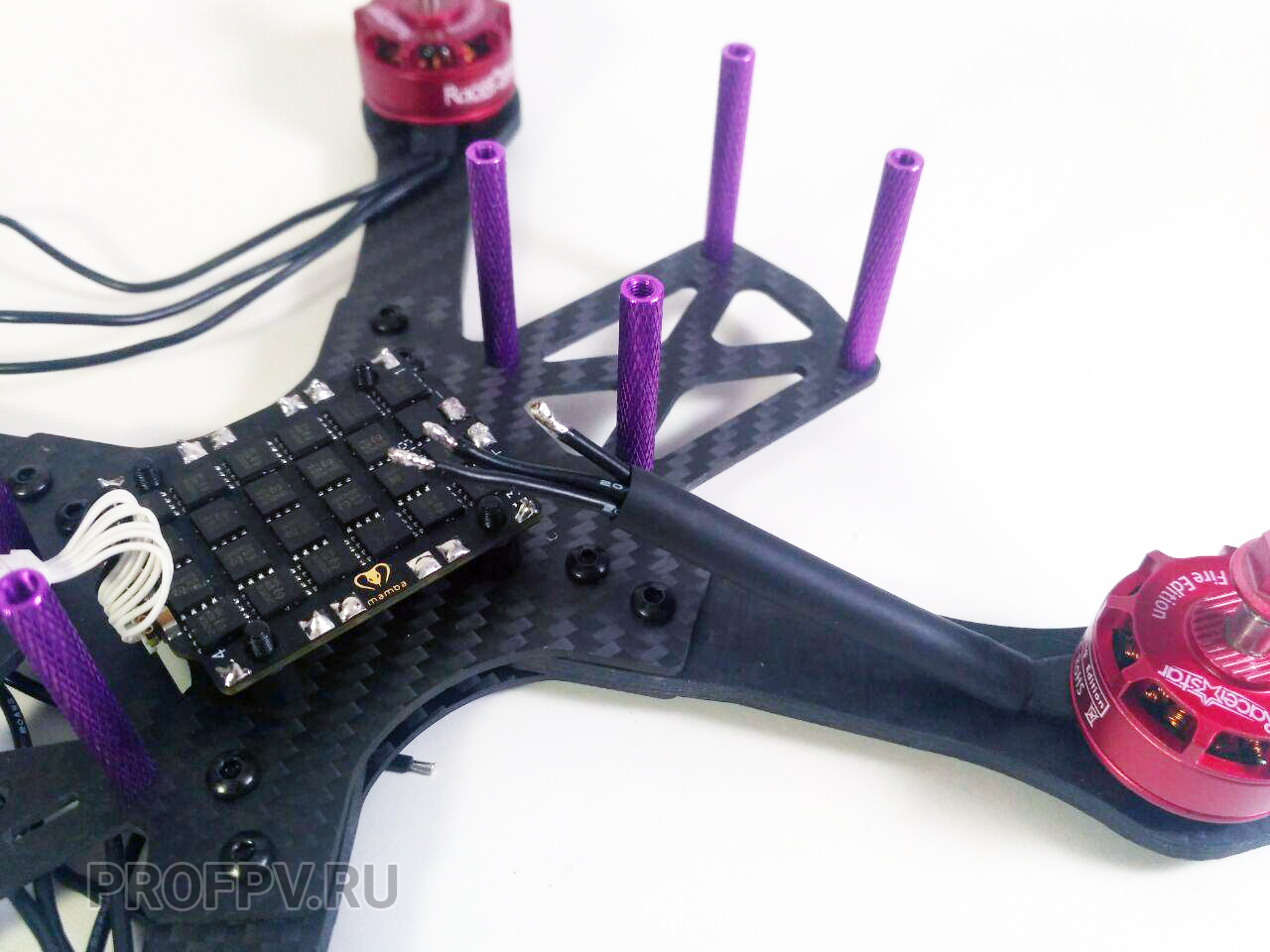
Теперь надеваем защиту на лучи и распределяем моторы квадрокоптера по направлению вращения. CW — моторы с вращением по часовой стрелке, CCW — против часовой. Провода должны смотреть в сторону центра квадрокоптера вдоль лучей. Классическая схема, по которой должны вращаться моторы, указана на рисунке. Но так как мы с вами собираем квадрокоптер своими руками, то вы можете выбрать абсолютно противоположный вариант. В общем, это потом легко настраивается.
Прикручиваем их, но не забываем капать фиксатор резьбы на соединения. Винты крепления нужны с длиной резьбовой части 7 мм. Этот квадрокоптер имеет толщину лучей 4 мм, плюс защита торцов 1 мм, плюс 2 мм само соединение. Итого 7 мм.
Главное не переборщите с длиной и перед затягиванием убедитесь в том, что винт не повредит обмотку мотора.
Установка регулятора оборотов 4-в-1.


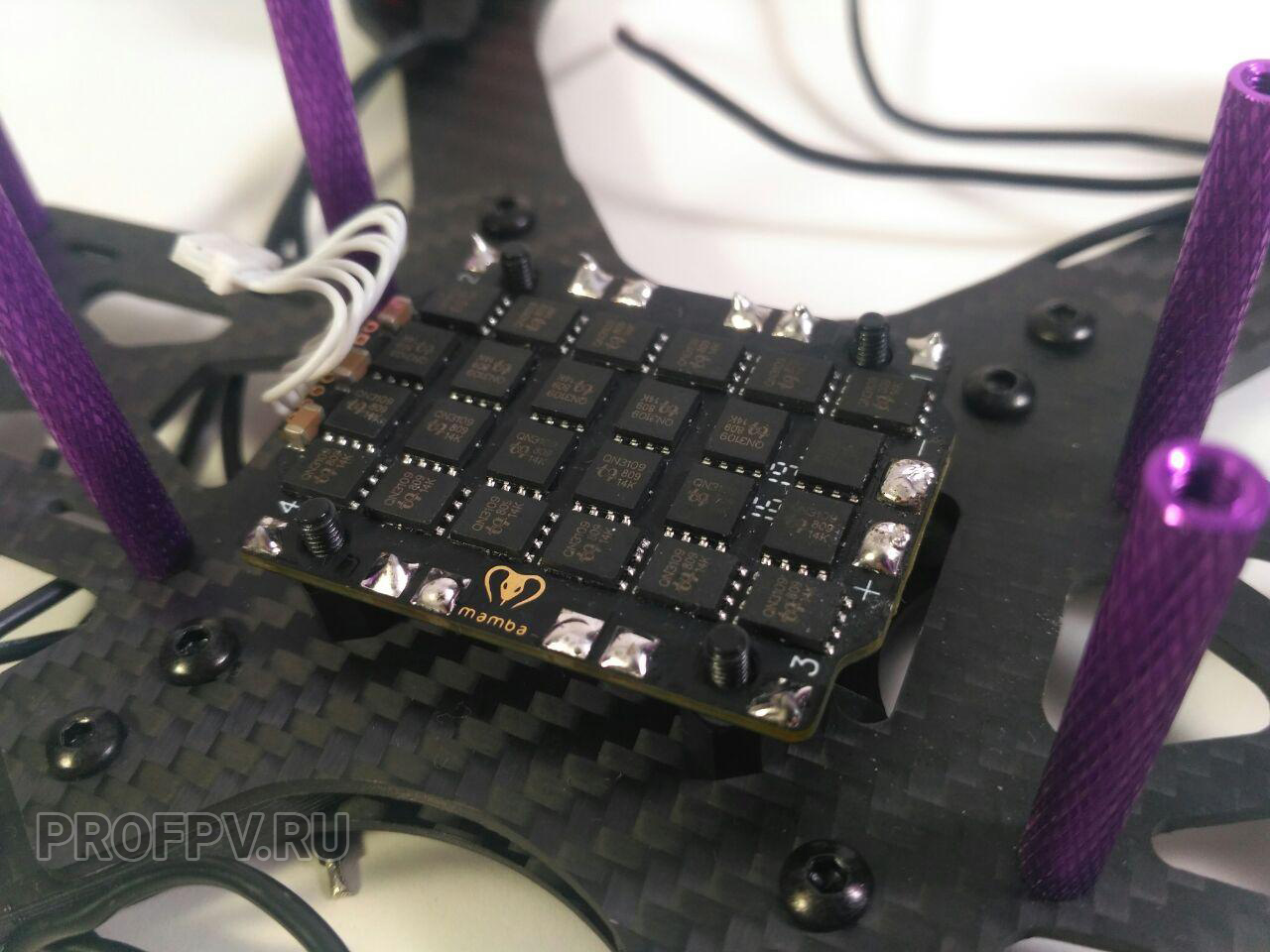
Чтобы правильно сориентировать регулятор оборотов, достаточно глянуть на обозначения номеров моторов на углах платы и надеть плату на 4 центральных винта. Контакты +/- должны оказаться сзади. Зафиксируйте плату нейлоновыми стойками, идущими в комплекте со стеком Mamba F405. Далее уже приступаем непосредственно к пайке компонентов.
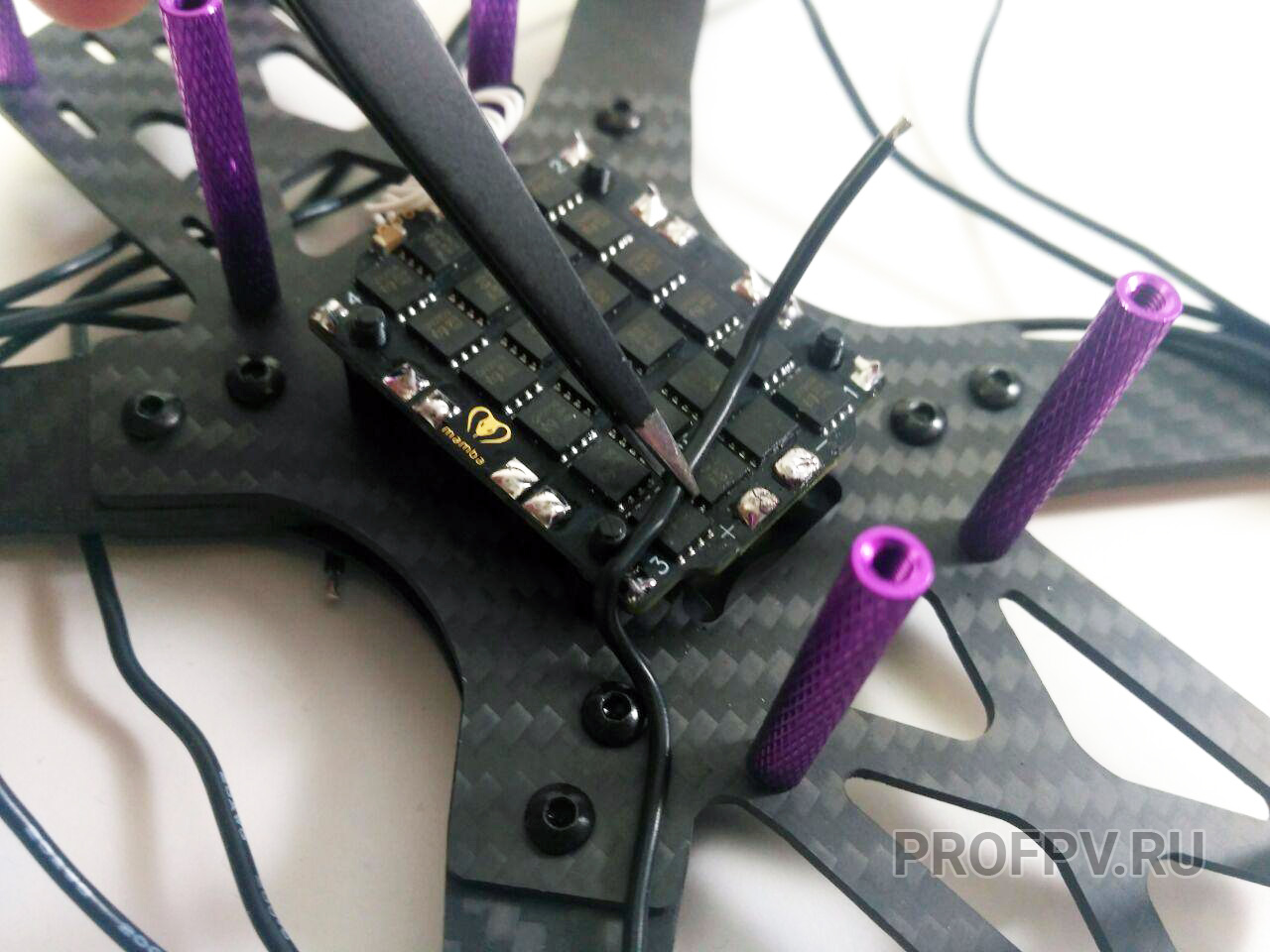
Прежде чем паять моторы к регулятору, отмеряем длину проводов до ближайших 3 контактов (относительно каждого мотора/луча) с небольшим запасом, отрезаем. Зачищаем провод где то на 3 мм, лудим. Лудим все контакты на плате регулятора. Дальше припаиваем провода от моторов также как на рисунке. Провода от моторов припаиваются к трем соответствующим этому мотору площадкам в любом порядке.

К контактам +/- припаиваем коннектор XT-60 как показано на рисунке. На этом можно считать работу с силовой частью квадрокоптера завершенной.
Теперь пришло время снабдить наш квадрокоптер глазами, ушами и мозгом.
Подключение FPV системы, приемника и пищалки к полетному контроллеру квадрокоптера.
Подключение FPV камеры.
Все FPV камеры, так или иначе, практически не отличаются друг от друга способом подключения к полетному контроллеру.  Чаще всего из камеры выходят 3 провода: черный — минус питания камеры (земля), красный — плюс питания камеры, желтый — видеосигнал. Теперь давайте разберем наш случай: камера Foxeer Predator 4 поддерживает напряжение питания 5-40 вольт. Наш полетный контроллер имеет на борту преобразователь напряжения на 5 и на 9 вольт. Например, будем использовать 9 вольт. Все контакты на плате Mamba F405 удобно распределены по группам для того, чтобы было легче паять (смотрите картинку). Хочу отметить, что я прежде всего припаиваю всю периферию, а уже потом устанавливаю плату на нейлоновые стойки. Делаю я так для правильной пайки. То есть, другими словами, провода продеваем в отверстия снизу, а припаиваем сверху, а не как многие блогеры, суют провод в отверстие и тут же жарят изоляцию. Дальше на фото будет видно, что я имею ввиду.
Чаще всего из камеры выходят 3 провода: черный — минус питания камеры (земля), красный — плюс питания камеры, желтый — видеосигнал. Теперь давайте разберем наш случай: камера Foxeer Predator 4 поддерживает напряжение питания 5-40 вольт. Наш полетный контроллер имеет на борту преобразователь напряжения на 5 и на 9 вольт. Например, будем использовать 9 вольт. Все контакты на плате Mamba F405 удобно распределены по группам для того, чтобы было легче паять (смотрите картинку). Хочу отметить, что я прежде всего припаиваю всю периферию, а уже потом устанавливаю плату на нейлоновые стойки. Делаю я так для правильной пайки. То есть, другими словами, провода продеваем в отверстия снизу, а припаиваем сверху, а не как многие блогеры, суют провод в отверстие и тут же жарят изоляцию. Дальше на фото будет видно, что я имею ввиду.
Вот мы присоединили камеру, теперь полетный контроллер уже умеет принимать сигнал от нее и накладывать различную информацию на картинку (OSD-on screen display), но еще не умеет передавать изображение в FPV очки или шлем. Для этого нужен видеопередатчик.
Подключение видеопередатчика.
Выбранный мной передатчик Foxeer Clear/ClearTX2 имеет шесть контактов. 
Красный — плюс питания передатчика, черный — минус питания, зеленый — SmartAudio (позволяет управлять мощностью с пульта радиоаппаратуры), желтый — вход видеосигнала из ПК после наложения на него информации (OSD). Есть еще черный и белый провода для питания камеры, но нам они в этой сборке не нужны. Обрезаем коннектор со стороны ПК, зачищаем, лудим провода и припаиваем согласно рисунку. Все провода желательно скручивать для того, чтобы уменьшить воздействие помех от регулятора оборотов.
Едем дальше…
Подключение приемника Flysky FS-iA6b по протоколу i-bus.
Изначально приемник Flysky FS-IA6B имеет несколько способов подключения, но мы остановимся именно на i-bus, так как это наиболее быстрый способ передачи данных от передатчика к ПК. Подключается приемник тремя проводами: красный — плюс питания обязательно 5 Вольт, черный — земля и i-bus. На полетном контроллере нет контакта i-bus, а есть s-bus. К нему мы его и подключим, но не пугайтесь, все будет работать. Использованный мной приемник можно дополнительно прошить на 14 каналов и уменьшить его размер за счет удаления корпуса и контактной платы вот до таких размеров… Я думаю, что к тому моменту, когда вы читаете данный текст, на сайте уже есть статья о том, как это сделать. Воспользуйтесь поиском по сайту со словом «RSSI».

Ну, вот мы и подобрались к моменту компоновки всех деталей нашего самодельного квадрокоптера.
Окончательная сборка квадрокоптера.
Буду приводить картинки и прокомментирую все дальнейшие действия, я думаю, что все будет понятно.

- Воспользуйтесь изолентой или стяжками для того, чтобы провода, идущие к моторам, были зафиксированы на лучах.
- Соберите «башню» квадрокоптера и установите в нее камеру. В комплекте к камере есть все крепления.
- Облегченный приемник радиоаппаратуры устанавливаем на стяжки под «башню», видеопередатчик на нее, или все наоборот. Возможно, у вас получится лучше скомпоновать их. Можно творчески подойти к этому моменту.
- Устанавливаем полетный контроллер на стойки в соответствии с направлением стрелки. Соединяем шлейфом ПК и регулятор оборотов 4 в 1.
- Устанавливаем «башню» на раму. На первое время прикрутите ее винтами без фиксатора резьбы. После того, как мы убедимся, что квадрокоптер своими руками полностью работоспособен, можно будет перекрутить их с фиксатором.
- Антенны радиоаппаратуры крепите вдоль передних двух лучей. Многие FPVшники мне сейчас плюнут в лицо, но я не заметил каких то проблем с радиосвязью аппаратуры до 300-400 метров. Ведь мы с вами используем бюджетную аппаратуру Flysky и ждать от нее большего не имеет смысла.
- Прикрепите buzzer (пищалку) к лучу, но оставьте отверстие в нем открытым и снимите наклейку. Всё.
Теперь несколько слов о недостатках этой сборки и о том, как я вышел из данной ситуации.  Главный недостаток — это размер приемника! (мне просто надо было его куда то пристроить). В самом начале статьи я рекомендовал вам выбрать миниатюрный приемник. Но даже с такими его размерами, я постарался не испортить внешний вид квадрокоптера. Я спроектировал и распечатал на 3д принтере крышку (скачать stl файл), под которую спрятал видеопередатчик. Кроме того, удобно закрепил антенну на ней. По-моему получилось неплохо…
Главный недостаток — это размер приемника! (мне просто надо было его куда то пристроить). В самом начале статьи я рекомендовал вам выбрать миниатюрный приемник. Но даже с такими его размерами, я постарался не испортить внешний вид квадрокоптера. Я спроектировал и распечатал на 3д принтере крышку (скачать stl файл), под которую спрятал видеопередатчик. Кроме того, удобно закрепил антенну на ней. По-моему получилось неплохо… 
Прошивка и настройка самодельного квадрокоптера.
Ну вот, мы своими руками собрали квадрокоптер, осталось его настроить.
Первым делом устанавливаем необходимые приложения: Betaflight Configurator и BLHeli Configurator. Первый нужен для прошивки и настройки полетного контроллера, а второй для настройки регулятора оборотов. Оба конфигуратора можно установить двумя способами: Во-первых, если у вас браузер Chrome, то их можно установить в качестве расширений для него. Во-вторых, можно установить их как отдельные приложения. Ссылки ниже:
BLHeli configurator — браузерное расширение, BLHeli configurator — отдельное приложение.
Betaflight Configurator — браузерное расширение, Betaflight Configurator — отдельное приложение.
Прошивка.
- Запускаем Betaflight Configurator (полетный контроллер пока не подключаем). На начальной странице видим список драйверов, которые необходимо установить. Устанавливаем все.

- Теперь можно обновить прошивку полетного контроллера. Закрываем Betaflight, зажимаем кнопочку boot на полетном контроллере и держим, снова запускаем Betaflight, отпускаем кнопочку boot.
 Прежде всего вы должны убедиться в том, что установлен режим DFU (маркер 1 на картинке). Если этого не произошло, попробуйте повторить предыдущие шаги. Также проблемы могут возникнуть из-за криво установленных драйверов. Эту проблему можно решить очень полезной утилитой. Запустите ее от имени администратора, и она все сделает за вас. После этого, попробуйте снова.
Прежде всего вы должны убедиться в том, что установлен режим DFU (маркер 1 на картинке). Если этого не произошло, попробуйте повторить предыдущие шаги. Также проблемы могут возникнуть из-за криво установленных драйверов. Эту проблему можно решить очень полезной утилитой. Запустите ее от имени администратора, и она все сделает за вас. После этого, попробуйте снова. - Далее, переходите на вкладку программатор.
- Из выпадающего списка выберите полетный контроллер Fury4OSD (DIAT) .
- В следующем выпадающем списке выберите последнюю стабильную версию прошивки.
- Нажмите на ползунок «полное стирание чипа».
- При подключенном интернете нажмите кнопку «Загрузить прошивку (Online)». Дождитесь загрузки прошивки. После этого кнопка «Загрузить прошивку» станет активной.

- Нажимаем кнопку «Загрузить прошивку» и дожидаемся окончания ее заливки в полетный контроллер (ПК). Всё.
- Отключаем ПК. Подсоединяем снова, но уже без зажатой кнопки boot. ПК должен мигать разноцветными светодиодами.

 Прежде всего вы должны убедиться в том, что установлен режим DFU (маркер 1 на картинке). Если этого не произошло, попробуйте повторить предыдущие шаги. Также проблемы могут возникнуть из-за криво установленных драйверов. Эту проблему можно решить очень полезной
Прежде всего вы должны убедиться в том, что установлен режим DFU (маркер 1 на картинке). Если этого не произошло, попробуйте повторить предыдущие шаги. Также проблемы могут возникнуть из-за криво установленных драйверов. Эту проблему можно решить очень полезной 
Настроим квадрокоптер своими руками.
- Жмем кнопку «Подключить». Вверху окна включаем режим эксперта. Переходим на вкладку «система», устанавливаем квадрокоптер на горизонтальную плоскость и нажимаем «Калибровать Акселерометр». Можете покрутить теперь квадрокоптер своими руками, и вы увидите как реагирует картинка на экране. На этой вкладке закончили.

- Идем на вкладку «порты». Делаем все как на картинке. Сохраняем и перезагружаем. Подключаем снова.

- Повторите все настройки, представленные на следующих нескольких картинках .Но не забывайте сохранять и перезагружать.



- На вкладке PID настройки оставьте значения по умолчанию. Квадрокоптер с ними ведет себя нормально. Впоследствии вы всегда можете углубиться в эту довольно сложную тему. На просторах рунета есть много статей про настройку PID регулятора.
- Теперь мы с вами подобрались к проверке корректности вращения моторов квадрокоптера.
 Моторы уже могут вращаться. Но нужно убедиться в том, что они все крутятся в нужную нам сторону. Во-первых, снимите пропеллеры, если они установлены, или просто отвинтите фиксирующие гайки. И, вообще, желательно все настройки производить в таком состоянии. Установленные пропеллеры — это риск нанести себе травму! Во-вторых, подсоедините аккумулятор к квадрокоптеру. Дальше переходим на вкладку «Моторы» конфигуратора Betaflight. Теперь включаем ползунок под маркером 2 на картинке. В блоке под маркером 3 указано правильное направление вращение для каждого из моторов.
Моторы уже могут вращаться. Но нужно убедиться в том, что они все крутятся в нужную нам сторону. Во-первых, снимите пропеллеры, если они установлены, или просто отвинтите фиксирующие гайки. И, вообще, желательно все настройки производить в таком состоянии. Установленные пропеллеры — это риск нанести себе травму! Во-вторых, подсоедините аккумулятор к квадрокоптеру. Дальше переходим на вкладку «Моторы» конфигуратора Betaflight. Теперь включаем ползунок под маркером 2 на картинке. В блоке под маркером 3 указано правильное направление вращение для каждого из моторов. - Переходим к блоку 4. Сначала плавно поднимаем ползунок возле мотора №1 и смотрим, куда он вращается. Если по часовой стрелке, тогда все хорошо, переводим ползунок вниз. Точно так же проверяем все оставшиеся моторы и выписываем те из них, которые вращаются в противоположную от нужной стороны. Выписали? Идем дальше.






 Моторы уже могут вращаться. Но нужно убедиться в том, что они все крутятся в нужную нам сторону. Во-первых, снимите пропеллеры, если они установлены, или просто отвинтите фиксирующие гайки. И, вообще, желательно все настройки производить в таком состоянии. Установленные пропеллеры — это риск нанести себе травму! Во-вторых, подсоедините аккумулятор к квадрокоптеру. Дальше переходим на вкладку «Моторы» конфигуратора Betaflight. Теперь включаем ползунок под маркером 2 на картинке. В блоке под маркером 3 указано правильное направление вращение для каждого из моторов.
Моторы уже могут вращаться. Но нужно убедиться в том, что они все крутятся в нужную нам сторону. Во-первых, снимите пропеллеры, если они установлены, или просто отвинтите фиксирующие гайки. И, вообще, желательно все настройки производить в таком состоянии. Установленные пропеллеры — это риск нанести себе травму! Во-вторых, подсоедините аккумулятор к квадрокоптеру. Дальше переходим на вкладку «Моторы» конфигуратора Betaflight. Теперь включаем ползунок под маркером 2 на картинке. В блоке под маркером 3 указано правильное направление вращение для каждого из моторов.Изменение направления вращения моторов квадрокоптера.
Настройка радиоаппаратуры Flysky.
Настройка радиоаппаратуры сводится к трем моментам. Во-первых, это реверс основных каналов (Roll, Pitch, Yaw, Throttle). Но только если потребуется. Во-вторых, это переназначение дополнительных (AUX) каналов. В-третьих, это настройка Failsafe. Запомните немаловажную информацию: в аппаратуре Flysky I6 сохранение любых измененных настроек происходит не кнопочкой «Ok», а длительным нажатием кнопки CANCEL!!!
Во-вторых, это переназначение дополнительных (AUX) каналов. В-третьих, это настройка Failsafe. Запомните немаловажную информацию: в аппаратуре Flysky I6 сохранение любых измененных настроек происходит не кнопочкой «Ok», а длительным нажатием кнопки CANCEL!!!
Как проверить, требуется ли делать реверс основных каналов в аппаратуре? 

Подключаем ПК к компьютеру, запускаем Betaflight, подсоединяем аккумулятор. Заходим на вкладку «Приемник». Двигаем стиками на аппаратуре и наблюдаем, как ведет себя изображение квадрокоптера на экране при повороте стиков в ту или иную стороны. Например, при повороте стика Yaw вправо, квадрокоптер должен вращаться вправо, и, наоборот. Точно так же необходимо проверить все органы управления, особенно Throttle (Газ). Если какой-либо канал работает не так как надо, тогда необходимо сделать реверс в самой аппаратуре.



Как вы можете видеть, в моем случае ничего менять не пришлось. На этом этапе будьте аккуратны и не включите реверс третьего канала (газ). Это может привести к тому, что при включении квадрокоптера он даст газ на полную!
AUX каналы.
Под AUX каналами в радиоаппаратуре подразумевают всякие дополнительные тумблеры и крутилки, которые используют для включения различных функций, а также управляют полетными режимами квадрокоптера. У нашего приемника Flysky FS-iA6b 6 каналов. Но всего 2 дополнительных. Допустим, что у нас один дополнительный канал будет отвечать за включение пищалки (крайний левый тумблер), а второй (трехпозиционный переключатель) — за изменение полетного режима. В аппаратуре это делается так:



Здесь я тумблер пищалки (SwA) переназначил на 6 канал (AUX 2), а трехпозиционный переключатель (SwC) установил на 5 канал (AUX 1).
Теперь идем в Betaflight и делаем все точно также, как указано на картинке (чтобы ползунки стали активными нужно нажать на кнопку «Добавить диапазон» и выбрать соответствующий канал AUX). 
Таким образом, при включении левого тумблера, будет звучать сигнал зуммера. Это полезная функция, которая помогает искать квадрокоптер в траве, если тот, например, упал.
Трехпозиционный переключатель позволит нам выбрать полетный режим: выключенное состояние — Disarm (моторы остановлены), вторая позиция — Arm (Моторы вращаются) и Angle (режим стабилизации), третья позиция — Arm и Acro (акробатический режим). Про режимы я советую вам почитать статьи на просторах рунета, в рамках этой статьи невозможно передать всю информацию по этой теме.
Настройки Failsafe. Квадрокоптер своими руками.
Failsafe — это очень важная функция, миссия которой, сохранить квадрокоптер, сделанный своими руками, в случае потери связи от радиоаппаратуры, а также чужое имущество.
На стороне аппаратуры мы должны настроить Failsafe хотя бы на одном канале. Рекомендую 3 (газ):




На стороне полетного контроллера делаем точно так же, как на картинке: 
Работает функция по следующему алгоритму. Например, потеряна связь, квадрокоптер на 3 секунды включает режим стабилизации, тем самым выпрямляет его, затем отключает моторы и включает зуммер (пищалку). Не игнорируйте эту настройку. А еще лучше не выходите в поле, пока не проверили работу функции дома без пропеллеров.
Настройка OSD
На этой вкладке мы долго задерживаться не будем, так как, настройка OSD — это личные предпочтения каждого пилота. 
Здесь вы смело можете экспериментировать с той информацией, которую хотите видеть на экране вашего FPV шлема или очков (ставя или убирая галочки), а также с месторасположением их на картинке (просто передвигая надписи). Обычно самым важной информацией для FPV пилота квадрокоптера является израсходованная емкость аккумулятора. Зная ее, вы вовремя посадите свой квадрокоптер и сохраните и его и недешевые аккумуляторы.
Вот вроде бы и все. Перед первым запуском квадрокоптера с установленными пропеллерами, еще раз проверьте следующие моменты:
Во-первых, корректность работы каналов (особенно газа!)
Во-вторых, Failsafe! Для этого достаточно отключить аппаратуру, и посмотреть, работает ли квадрокоптер по нашему сценарию.
В-третьих, я мог, что-то упустить из виду и не описать в статье какую-нибудь мелочь. Пишите комментарии, я постараюсь быстро ответить.
UPD: Как настроить датчик тока на полетном контроллере квадрокоптера? Читайте здесь.